Изобретения относятся к области энергетики и транспортного машиностроения, в частности к преобразователям одного вида энергии в другой, и могут быть использованы для снабжения электрической энергией различных потребителей во всех отраслях промышленности и в быту, а также для осуществления перемещения транспортных средств.
Известен двухфазный асинхронный двигатель с ротором в виде полого цилиндра, содержащий наружный статор, выполненный в виде неподвижного кольцевого сердечника, в пазах которого уложены обмотки управления и возбуждения; внутренний статор, выполненный без обмотки и набранный из листов электрической стали и укрепленный на выступе одной из крышек; вал, пропущенный в отверстие внутреннего статора и на который насажен ротор, выполненный в виде легкого тонкостенного стакана из немагнитного материала (алюминия, меди) (аналог - Электротехника. Общий курс. Под ред. B.C.Пантюшина. М. и Л.: Гос. энергетическое изд-во, 1960, с.583-584).
При работе двигателя полый ротор вращается в зазоре между наружным и внутренним статорами и в нем возникают вихревые токи, которые, взаимодействуя с вращающимся полем статора, создают вращающий момент.
Такой двигатель обычно применяют в маломощных быстродействующих автоматических устройствах и следящих системах приборного типа в качестве исполнительного двигателя.
Известно устройство для получения направленных механических колебаний, содержащее корпус с беговой дорожкой эллиптической формы, имеющей элемент, выполненный с возможностью обкатывания беговой дорожки и вращения вокруг оси, и приводной механизм, при этом ось переносного движения инерционного элемента размещена в одном из фокусов эллиптической траектории, выбранном в качестве главного, и совмещена с осью вала двигателя привода, а приводной механизм содержит узел принудительного поджатия инерционного элемента к беговой дорожке (аналог-патент РФ №2280513, В06В 1/12).
Это устройство не предназначено для преобразования механической энергии в электрическую или, наоборот, электрической в механическую.
Известен асинхронный генератор, содержащий статор, выполненный с возможностью вращения, и коротко-замкнутый ротор, расположенный на валу в расточке статора (аналог - Копылов И.П. Космическая электромеханика: Учеб пособие. - 3-е изд., перераб. и доп. - М.: Высш. школа, 2005. - с.27-29).
Напряжение на обмотки статора подают через контактные кольца, а генератор имеет два выходных конца вала, к которым прилагают моменты сопротивления (нагрузки) ротора и статора. Такой асинхронный генератор имеет ограниченное применение.
Известен способ использования электрической машины в качестве генератора электрической энергии, предусматривающий использование для получения электрического тока генератора, вырабатывающего этот ток при взаимодействии статора и ротора, вращаемого через приводной вал двигателя (прототип - Касаткин А.С., Немцов М.В. Электротехника: Учебное пособие для вузов. - 4-е изд. перераб. - М.: Энергоатомиздат, 1983. - 440 с.).
Этот способ и устройство для его реализации предполагает использование дополнительной электрической энергии только для питания различных обмоток.
Известен способ преобразования направленных механических колебаний в однонаправленное прерывистое поступательное движение, предусматривающий взаимодействие между собой двух масс системы, одна из которых является инерционной, вращается вокруг своей оси, одновременно перемещается относительно другой массы по эллиптической траектории с упругим поджатием ее к беговой дорожке эллипса, сообщая системе направленные механические колебания, при этом систему используют неуравновешенную с центром масс, совпадающим в статическом состоянии с центром тяжести этой же системы и с одним из фокусов эллипса, выбранного в качестве главного, и относительно которого производят эксцентричное перемещение сбалансированной массы, причем в процессе движения систему ориентируют таким образом, чтобы длинная ось эллипса совпадала с требуемым направлением движения, головная часть эллипса была направлена в сторону этого движения, а само движение системы осуществляют последовательными шаговыми перемещениями в моменты импульсного действия инерционных сил вдоль длинной оси эллипса максимальной по величине возмущающей силы, направленной от главного фокуса в сторону движения (прототип - патент РФ №2280513, В06В 1/12).
В этом способе возбуждаются только инерционные силы движения и отсутствует возможность получать электрическую энергию для внутреннего и внешнего потребления.
Поставленная задача - повышение эффективности работы электрической машины путем обеспечения возможности получения дополнительной энергии, используемой на самообеспечение работы машины в номинальном режиме и на обеспечение потребителей, а также для получения тяги, используемой для обеспечения возможности использования электрической машины в качестве движителя.
Эта задача решается тем, что в эксцентроидной электрической машине, содержащей корпус, статор, выполненный с возможностью вращения относительно корпуса, и ротор принудительного вращения, жестко закрепленный на приводном валу генератора, согласно изобретению, корпус выполнен с внутренней поверхностью в виде эллиптической беговой дорожки из диэлектрического материала, статор выполнен в виде трех инерционных элементов, каждый из которых набран из пластин электротехнической стали и содержит ось вращения, на которой по обе стороны от инерционного элемента одними концами закреплены телескопические пружинные связи, другие концы которых закреплены в демпферах, жестко установленных на приводном валу симметрично по обе стороны от ротора принудительного вращения, а сами инерционные элементы выполнены в виде роликов, снабженных с торцов магнитными поясами из четного количества полуколец разной полярности, ротор принудительного вращения выполнен в виде керамической втулки, в пазах которой размещена зигзагообразная обмотка, оба конца которой подключены к двум пластинам кольцевого коллектора, размещенного на приводном валу, ось приводного вала размещена эксцентрично относительно малой оси эллипса и находится в одном из его фокусов, дополнительно содержит ротор свободного вращения, полый вал которого размещен концентрично относительно ротора принудительного вращения на подшипниках скольжения, установленных на приводном валу, при этом ротор свободного вращения содержит внутри полого вала систему из четного количества постоянных магнитов с чередующимися полюсами разной полярности, являющихся статором ротора принудительного вращения, а снаружи - систему рамок, равномерно распределенных на внешней поверхности полого вала и снабженных ободами, на которых размещены магнитные пояса, состоящие из четного количества постоянных магнитов чередующейся полярности, причем магнитные пояса статора и ротора свободного вращения расположены напротив друг друга, а телескопические пружинные связи размещены относительно друг друга под углом 120°.
Каждый из демпферов содержит полое цилиндрическое перфорированное кольцо, жестко закрепленное на приводном валу и разделенное внутренними радиальными перегородками, между которым в распор установлены компенсационные пружины.
Концы телескопических пружинных связей, размещенные в демпферах, выполнены со ступицами, жестко установленными на приводном валу, размещены в средней части компенсационных пружин и выходят из демпферов через отверстия в их цилиндрических кольцах.
Выполнение корпуса с внутренней поверхностью в виде эллиптической беговой дорожки обеспечивает возможность осуществления вращения статора относительно корпуса по эллиптической орбите.
Выполнение статора в виде трех инерционных элементов позволяет использовать эти элементы вместо традиционно применяемых неподвижных катушек.
Наличие у каждого инерционного элемента оси вращения обеспечивает возможность как вращения вокруг этой оси, так и перемещения по беговой дорожке эллиптической формы.
Закрепление на оси вращения по обеим сторонам от инерционного элемента одних концов телескопических пружинных связей, а других концов телескопических пружинных связей в демпферах обеспечивает возможность перемещения инерционных элементов по беговой дорожке с периодически изменяющимся радиусом и вращения за счет упругих свойств возвратной пружины.
Установление демпферов симметрично по обе стороны от ротора жестко на приводном валу исключает перекосы инерционных элементов в процессе их вращения.
Выполнение самих инерционных элементов в виде роликов позволяет увеличить площадь контакта с поверхностью беговой дорожки, а снабжение роликов с торцов магнитными поясами из четного количества полуколец разной полярности дает возможность получать при их вращении магнитные поля, взаимодействующие с магнитными полями ротора.
Выполнение ротора принудительного вращения в виде керамической втулки обеспечивает изоляцию его от приводного вала.
Размещение в пазах втулки зигзагообразной обмотки позволяет усилить ЭДС за счет сложения ЭДС каждого из проводников.
Подключение обеих концов обмотки к двум пластинам кольцевого коллектора, размещенного на приводном валу, обеспечивает возможность отведения тока, полученного в генераторе.
Размещение оси приводного вала эксцентрично относительно геометрической оси генератора дает возможность получать неуравновешенные силы инерции.
Наличие дополнительного ротора свободного вращения позволяет получить вращение с большой угловой скоростью за счет полного ускорения силами: центростремительной и тангенциальной.
Наличие у ротора свободного вращения полого вала обеспечивает возможность применять его как опорную конструкцию, в которой используются обе поверхности, внешняя и внутренняя.
Размещение же этого полого вала концентрично относительно ротора принудительного вращения на подшипниках скольжения, установленных на приводном валу, обеспечивает ему возможность независимого вращения относительно приводного вала.
Наличие у ротора свободного вращения внутри полого вала системы из четного количества постоянных магнитов с чередующимися полюсами обеспечивает создание магнитного поля, действующего в плоскости, перпендикулярной к оси вращения приводного вала.
Наличие у ротора снаружи полого вала системы рамок, равномерно распределенных на внешней поверхности полого вала, дает возможность использовать эти рамки в качестве плеч рычагов для усиления вращательного момента.
Снабжение системы рамок ободами обеспечивает опору для крепления постоянных магнитов.
Размещение на ободах магнитных поясов, состоящих из четного количества постоянных магнитов чередующейся полярности, позволяет получать магнитное поле, взаимодействующее с магнитным полем статора.
Расположение магнитных поясов статора ротора принудительного вращения и ротора свободного вращения напротив друг друга обеспечивает равномерное распределение намагничивающих сил и отталкивание одноименной полярности при вращении.
Размещение телескопических пружинных связей относительно друг друга под углом 120° делает подобным расположение инерционных элементов статора размещению катушек, например, асинхронного бесколлекторного генератора.
Наличие в каждом из демпферов полого цилиндрического кольца, жестко закрепленного на приводном вале и разделенного внутри радиальными перегородками, между которыми в распор установлены компенсирующие пружины, позволяет при ускорении или замедлении движения инерционных элементов возвращать их в начальное положение, соответствующее промежуточному положению их между ускорением и замедлением их движений.
Выполнение концов телескопических пружинных связей, размещенных в демпферах, со ступицами, жестко установленными на приводном валу, позволяет использовать эти элементы как привод (водило) инерционных элементов.
Размещение этих концов в средней части компенсационных пружин позволяет компенсировать их отклонение от исходного положения, а выход их из демпферов через отверстия в их цилиндрических кольцах обеспечивает связь телескопических элементов с инерционными элементами и удлинение или сокращение их длины при обкатывании инерционными элементами эллиптической орбиты.
Эта задача решается и тем, что в способе использования эксцентроидной электрической машины в качестве генератора электрической энергии, предусматривающем использование для получения электрического тока генератора, вырабатывающего этот ток при взаимодействии статора и ротора принудительного вращения, вращаемого полным ускорением инерционных сил через приводной вал двигателем, согласно изобретению, ось эксцентроидной электрической машины располагают в пространстве горизонтально, после выхода генератора в номинальный режим работы приводной двигатель отключают от внешней сети и запитывают его энергией, получаемой путем взаимодействия магнитной системы ротора свободного вращения, размещенной снаружи его полого вала, со статором, вращающихся в противоположных направлениях, а энергию для потребления получают путем взаимодействия ротора принудительного вращения с магнитной системой ротора свободного вращения, размещенной внутри его полого вала.
Размещение оси эксцентроидной электрической машины в пространстве горизонтально позволяет использовать традиционную компоновку генераторов, предусматривающую их надежное закрепление на станине.
Для гашения вибрации и биения электромагнитного корпуса, возбуждаемых эксцентричным вращением инерционных элементов статора эксцентроидной электрической машины относительно фокуса, где находится ротор свободного вращения, предусматривается надежное закрепление на станине, имеющей антивибрационные свойства.
Отключение приводного двигателя от внешней сети после выхода генератора в номинальный режим работы обеспечивает исключение потребления внешней энергии.
Запитывание приводного двигателя после отключения его от внешней сети энергией, получаемой путем взаимодействия магнитной системы ротора свободного вращения, размещенной снаружи его полого вала, со статором, вращающимся в противоположных направлениях, обеспечивает условие самообеспечения.
Получение энергии для потребления путем взаимодействия ротора принудительного вращения с магнитной системой ротора свободного вращения, размещенной внутри его полого вала, дает возможность производить энергию повышенной мощности за счет ускоренного движения роторов, вращающихся в противоположных направлениях, усиливая потенциал зигзагообразной обмотки ротора принудительного вращения путем умножения.
Эта задача решается также тем, что в способе использования эксцентроидной электрической машины в качестве движителя транспортного средства, предусматривающем для получения силы тяги использование движителя, вырабатывающего импульсы инерционных сил, согласно изобретению, ось эксцентроидной электрической машины располагают в пространстве вертикально, силу тяги в горизонтальном направлении получают путем эксцентричного вращения инерционных элементов относительно фокуса, где располагают ротор свободного вращения, силу тяги в вертикальном направлении получают путем взаимодействия магнитных полей ротора свободного вращения со статором, вращающимся в противоположном направлении, а силу тяги в заданном направлении получают путем регулирования соотношения между величинами сил тяги в вертикальном и горизонтальном направлениях, и дополнительно производят электрическую энергию для самообеспечения путем взаимодействия ротора принудительного вращения с магнитной системой, размещенной на внутренней поверхности ротора свободного вращения.
Размещение оси эксцентроидной электрической машины в пространстве вертикально обеспечивает возможность использования этой машины преимущественно в качестве движителя.
Получение силы тяги в горизонтальном направлении путем эксцентричного вращения инерционных элементов относительно фокуса, где располагают ротор свободного вращения, позволяет использовать равнодействующую неуравновешенных сил инерции направленного действия в качестве силы тяги, так как плоскость вращения в данном случае является горизонтальной.
Получение силы тяги в вертикальном направлении путем взаимодействия ротора свободного вращения со статором, вращающимися в противоположном направлении, обеспечивает возможность использовать в качестве этой силы тяги силы, возникающие в двух магнитных полях противоположного вращения, а именно подъемную силу электромагнитного поля, противодействующую силе тяготения земли, и электродвижущую силу смещенных зарядов, отталкивающихся от магнитного поля электромагнитной силы.
Контуры магнитных полей, объединенных взаимной индукцией и индуктивностью через потокосцепления, осуществляют подъемную силу.
Плюс или минус для ЭДС взаимной индукции зависит от подъема или снижения дисколета.
Получение силы тяги в заданном направлении путем регулирования соотношения между величинами сил тяги в вертикальном и горизонтальном направлениях обеспечивает возможность управления транспортным средством без изменения положения движителя и транспортного средства относительно друг друга, что значительно упрощает конструкцию транспортного средства в целом.
Дополнительное получение электрической энергии для самообеспечения путем взаимодействия ротора принудительного вращения с магнитной системой, размещенной на внутренней поверхности ротора свободного вращения, позволяет использовать возможности эксцентроидной электрической машины как генератора. Взаимодействие ротора принудительного вращения с отраженной от металлической поверхности полого вала бегущей электромагнитной волной позволяет получить высокий потенциал дополнительной мощности.
Изобретения иллюстрируются чертежами, где:
Фиг.1 - вид сверху генератора-движителя;
Фиг.2 - генератор электрической энергии, вид сбоку при снятой крышке с лопастями винта, вмонтированными в ротор свободного вращения;
Фиг.3 - роторная часть генератора-движителя;
Фиг.4 - то же, вид с торца с лопастями винта;
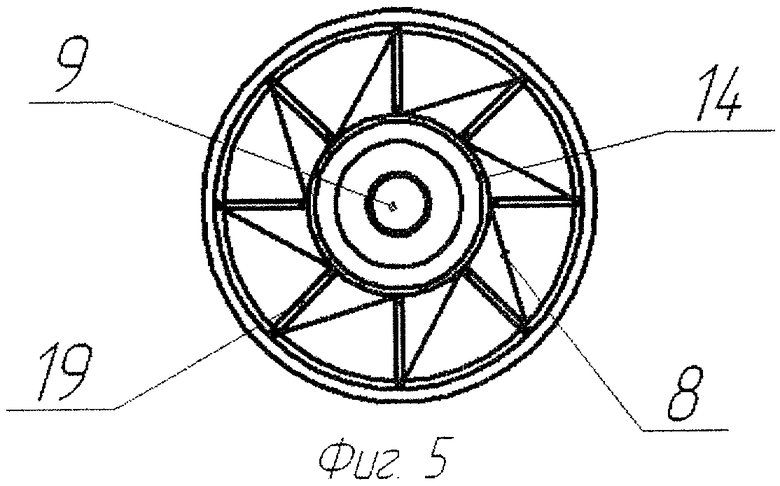
Фиг.5 - то же, поперечный разрез без лопастей винта;
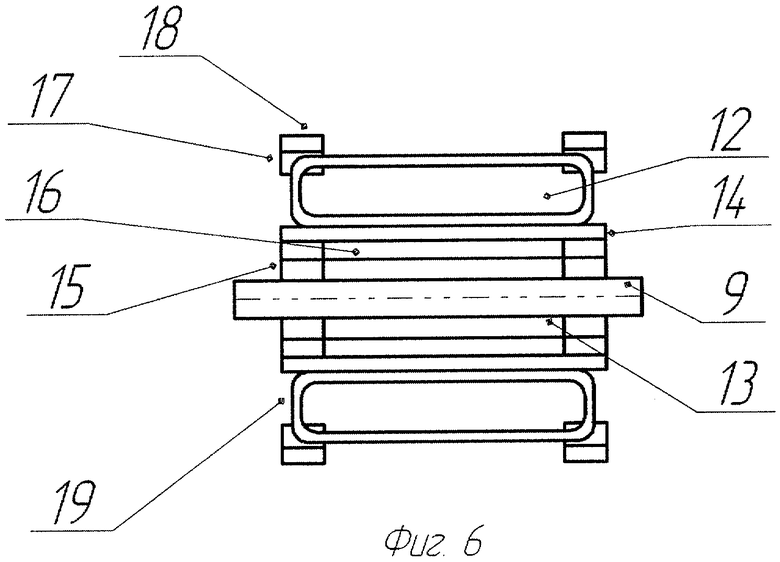
Фиг.6 - то же, продольный разрез;
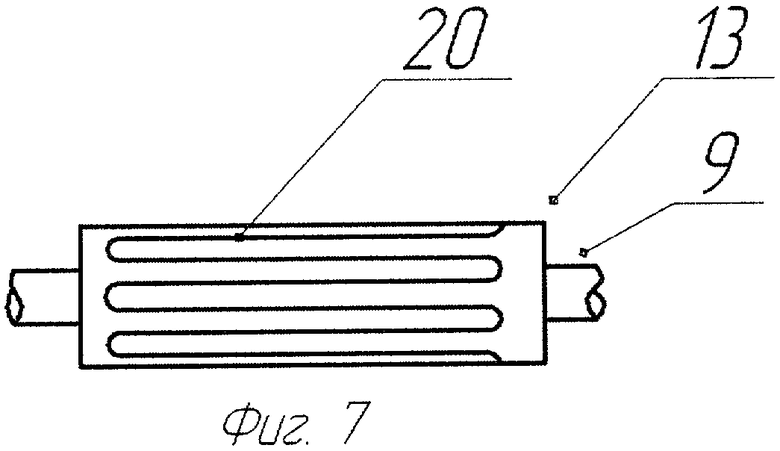
Фиг.7 - ротор принудительного вращения, вид сбоку;
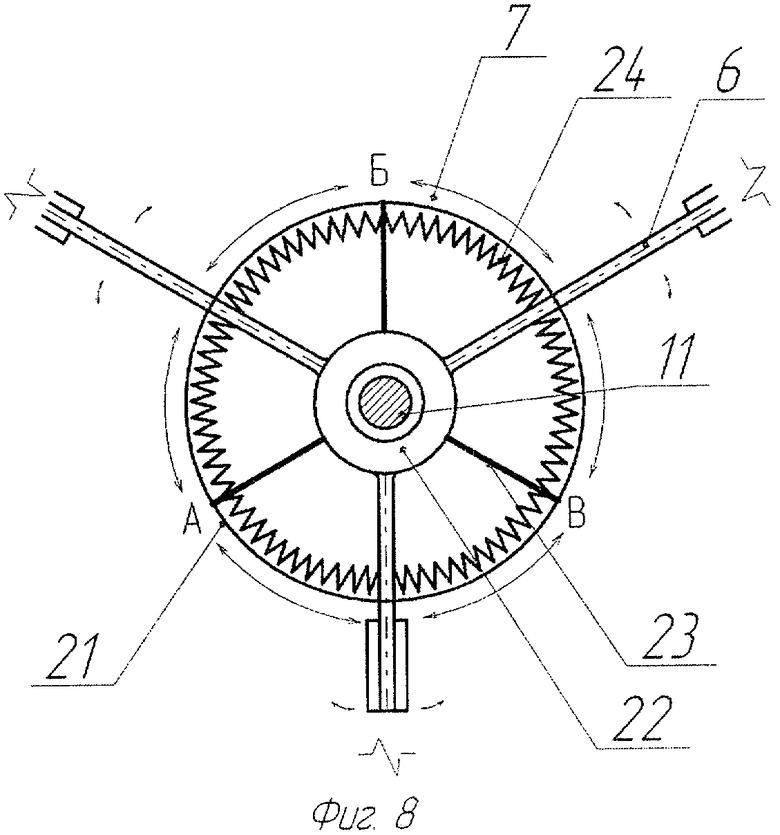
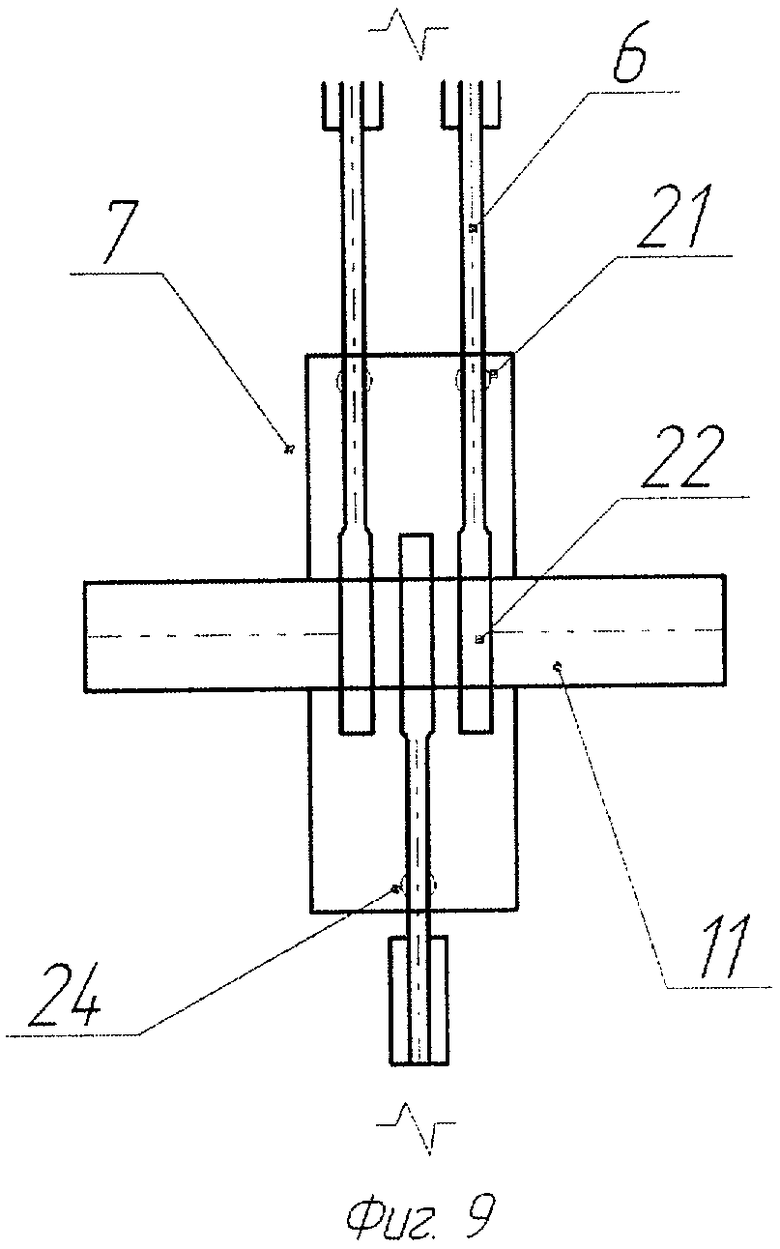
Фиг.8 - демпфер с телескопическими пружинными связями, поперечный разрез;
Фиг.9 - то же, вид сбоку;
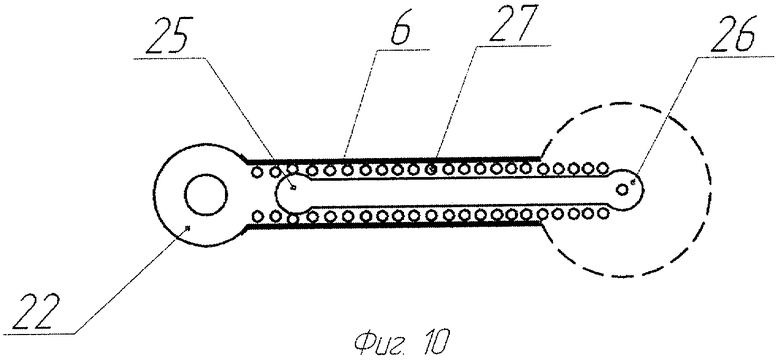
Фиг.10 - телескопическая пружинная связь, в сжатом состоянии;
Фиг.11 - то же, в разжатом состоянии;
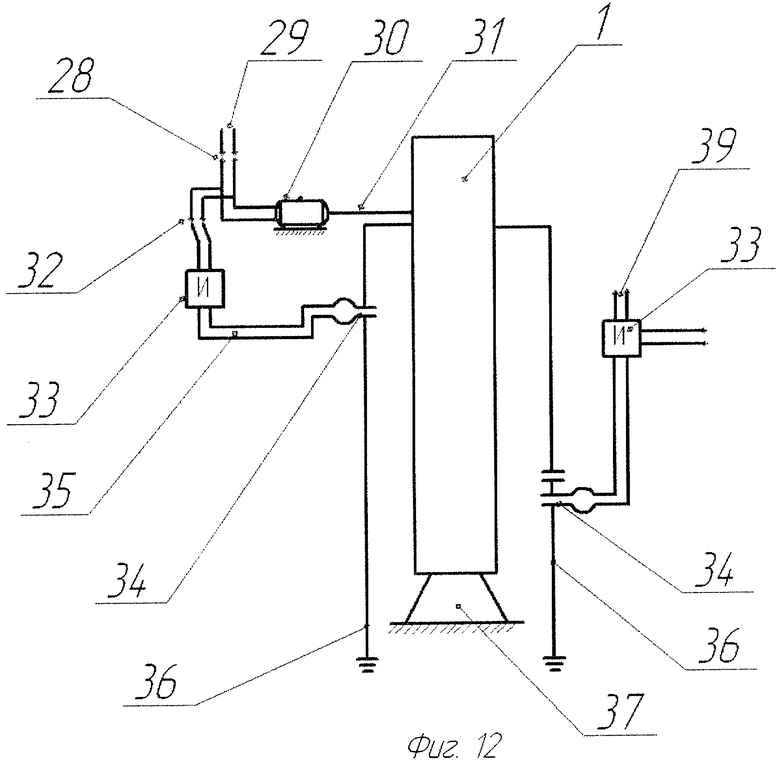
Фиг.12 - генератор электрической энергии с коммутационными устройствами для извлечения энергии самообеспечения и использования энергии дополнительной мощности;
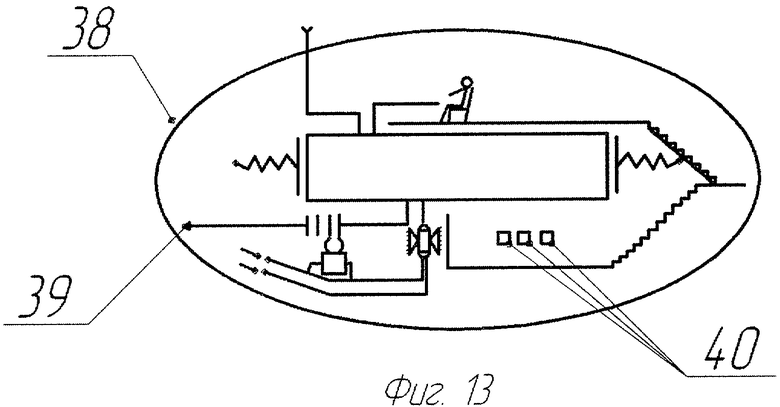
Фиг.13 - транспортное средство с использованием эксцентроидной электрической машины, вид сбоку;
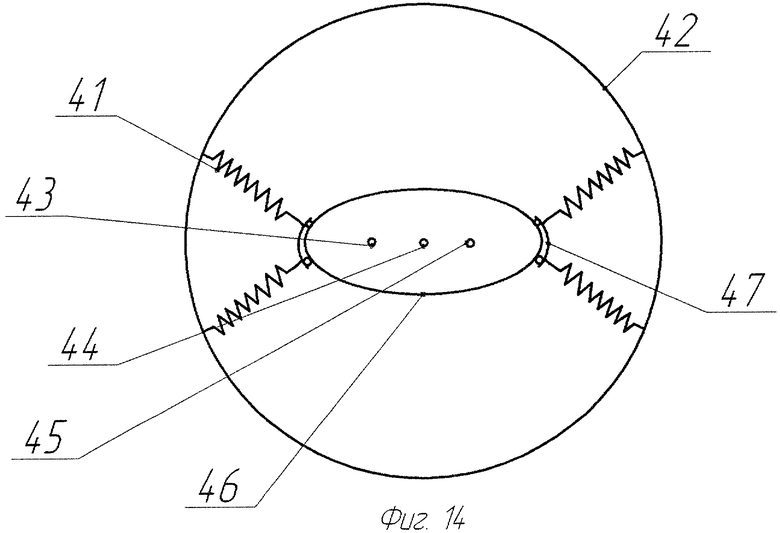
Фиг.14 - то же, вид сверху.
Эксцентроидная электрическая машина содержит (фиг.1, 2) корпус 1, выполненный с внутренним кольцом в виде эллиптической беговой дорожки 2 из диэлектрического материала, статор, выполненный в виде трех инерционных элементов 3, каждый из которых набран из пластин электротехнической стали, содержит ось 4 вращения, выполнен в виде роликов, снабженных с торцов магнитными поясами 5, состоящими из четного количества полуколец разной полярности.
Ось 4 вращения каждого из инерционных элементов 3 соединена двумя телескопическими пружинными связями 6 с демпферами 7, установленными симметрично по обе стороны роторной системы, включающей лопасти винтов 8, на общем для статора и ротора приводном валу 9, который размещен эксцентрично относительно геометрической оси эксцентроидной электрической машины.
Корпус 1 сбоку закрыт двумя крышками 10, на которых с внутренних сторон установлены эллиптические уголковые направляющие элементы 11, образующие совместно с эллиптической беговой дорожкой 2 эллиптический замкнутый канал для перемещения в нем инерционных элементов 3.
Телескопические пружинные связи размещены относительно друг друга под углом 120°.
Роторная система эксцентроидной электрической машины (фиг.3-7) состоит из двух роторов: ротора 12 свободного вращения и ротора 13 принудительного вращения, жестко размещенном на приводном валу 9.
Ротор 12 свободного вращения содержит полый вал 14, размещенный на подшипниках скольжения 15 концентрично по отношению как к приводному валу, так и ротору 13 принудительного вращения.
Внутри полого вала 14 из ферромагнитного материала размещена система из четного количества постоянных магнитов 16 с чередующимися полюсами, а снаружи своих ободов 17 магнитные пояса 18, состоящие также из четного количества постоянных магнитов.
Магнитные пояса 5 и 18 статора и ротора 12 свободного вращения расположены оппозитно, а постоянные магниты 16 имеют длину, соизмеримую с длиной ротора 13.
Ротор 12 свободного вращения содержит снаружи полого вала 14 систему рамок 19, равномерно распределенных на внешней поверхности этого вала, при этом плоскости рамок 19 перпендикулярны к этой поверхности, внутренние длинные стороны рамок жестко закреплены на этой поверхности, а внешние длинные стороны рамок заключены на их концах в ободах 17, с внешних торцов которых установлены магнитные пояса 18, состоящие из четного количества постоянных магнитов чередующейся полярности.
Снаружи полого вала 14 между перпендикулярно расположенными и равномерно распределенными на внешней поверхности этого вала рамками 19 с наклоном 15° к поверхности полого вала 14 установлены и жестко закреплены к рамке 19, в ее нижней части примыкающей к полому валу 14, лопасти винтов 8 в количестве 4-х пар. Верхний стержень системы рамок 19 служит стержнем беличьего колеса ротора 12 свободного вращения.
В кольцевом пространстве между внутренней поверхностью полого вала 14 ротора 12 свободного вращения и приводным валом 9 размещен ротор 13 принудительного вращения, жестко установленный на этом валу. На внешней поверхности этого ротора выполнены профилированные пазы, в которых зигзагообразно уложен проводник 20 (электротехнический провод). Оба конца обмотки 20 соединены с двумя пластинами кольцевого коллектора (не показан), размещенного на приводном валу 9 по обе стороны от роторной системы.
Каждый из демпферов 7 (фиг.8, 9) выполнен в виде цилиндрического полого кольца 21, жестко закрепленного на приводном валу 9, при этом на этом же валу и внутри этого кольца жестко закреплены и ступицы 22 телескопических связей 6, которые через отверстия в цилиндрической стенке кольца выведены наружу.
Те части телескопических связей 6, которые находятся внутри кольца 21, размещены в трех секциях, разделенных между собой радиальными перегородками 23, закрепленными жестко одним концом на внутренней поверхности кольца 21, а другим - на приводном валу 9, причем эти телескопические связи 6 дополнительно поддерживаются компенсационными пружинами 24, закрепленными одним концом на радиальной перегородке 23, а другим - на телескопической связи 6.
Телескопические связи 6 (фиг.10, 11) содержат две или более трубчатых секций, одна из которых размещена в другой. Секция наибольшего диаметра имеет на одном конце ступицу 22, для жесткого закрепления на приводном валу 9. Секция меньшего диаметра с одного конца имеет оголовок 25, а с другого - ступицу 26 с отверстием для закрепления на оси инерционного элемента 3. В кольцевом промежутке между трубчатыми секциями размещена пружина 27 сжатия.
Эксцентроидная электрическая машина (фиг.1) работает следующим образом.
При включении электродвигателя (не показан) вращение с его вала передают на приводной вал 9 эксцентроидной электрической машины. В момент пуска, разгона и работы в номинальном режиме инерционные элементы 3 находятся в постоянном контакте с беговой дорожкой 2 за счет упругого взаимодействия с ней, осуществляемого телескопическими пружинными связями 6. В процессе обкатывания беговой дорожки 2 инерционными элементами 3 происходит дополнительный их поджим центробежными силами инерции. Вследствие имеющегося эксцентриситета каждый из инерционных элементов 3 периодически удаляется от геометрической оси приводного вала 9 на максимальное расстояние вдоль длинной оси эллипса, а через 180° периодически приближается к этой оси на минимально расстояние. Периодическое изменение скорости вращения и координат центра масс относительно геометрической оси приводного вала 9 приводит к появлению неуравновешенных сил инерции. В процессе вращения инерционных элементов 3 проявляются физические явления, связанные с появлением инерционных сил.
Известно, что при любом движении по криволинейному пути одновременно с появлением центробежных сил появляются центростремительные силы. Центробежная сила  воздействует на траекторию криволинейного пути через инерционный элемент, а центростремительная сила Pn и тангенциальная сила Pt участвуют в образовании полного ускорения инерционных сил. Сила извне (электродвигатель) приложена через телескопическую пружинную связь 6 к инерционному элементу 3. Силы извне и инерционные силы, возбуждаемые эксцентричным вращением инерционных элементов, не равны, так как они приложены к разным телам, в соответствии с формулой
воздействует на траекторию криволинейного пути через инерционный элемент, а центростремительная сила Pn и тангенциальная сила Pt участвуют в образовании полного ускорения инерционных сил. Сила извне (электродвигатель) приложена через телескопическую пружинную связь 6 к инерционному элементу 3. Силы извне и инерционные силы, возбуждаемые эксцентричным вращением инерционных элементов, не равны, так как они приложены к разным телам, в соответствии с формулой  .
.
Полным ускорением инерционных сил, определяемым по формуле
где an - ускорение центростремительной силы;
at - ускорение тангенциальной силы,
производят раскрутку ротора свободного вращения, противоположно вращению инерционных элементов 3, с частотой вращения большей, чем частота вращения ротора принудительного вращения, увеличивая потенциал энергии ΔЕ для самообеспечения.
При вращении инерционных элементов 3 их магнитные пояса 5 в момент приближения к ротору свободного вращения периодически взаимодействуют с магнитными поясами 18 этого ротора, что приводит к его вращению.
При этом ротор принудительного вращения, жестко установленный на приводном валу 9, вращается с такой же угловой скоростью, как и инерционные элементы 3. В момент, когда инерционный элемент 3 находится на минимальном расстоянии от геометрической оси роторов, полное ускорение инерционных сил имеет максимальное значение, что приводит соответственно к ускоренному вращению ротора свободного вращения. В результате этого ускоренного вращения возбуждается дополнительная энергия, которая превышает потребляемую энергию, возбуждаемую внешним электродвигателем, то есть получают энергию, которая позволяет перейти на самообеспечение. Так как ободы ротора свободного вращения связаны с его полым валом 14 рамками 19, то последние в данном случае способствуют проявлению маховичных свойств (фиг.3, 6, 12).
В раскрученном роторе свободного вращения 12 установленные на внутренней поверхности полого вала 14 постоянные магниты 16 противоположной полярности создают ускоренным вращением магнитное поле, которое воздействует на зигзагообразную обмотку 20 ротора принудительного вращения 13, возбуждая в ней электрический ток, который направляется коммутационным устройством к приводному двигателю 30 (не показан) или на потребление 39. Если расположение приводного вала горизонтальное и инерционные элементы вращаются по эллиптической орбите, расположенной в вертикальной плоскости, то машина в данном случае является источником электрической энергии. Так как при таком расположении будут наблюдаться значительные биения о корпус, то станина 37 должна иметь противовибрационные свойства.
При вертикальном расположении ведущего вала усиливаются свойства инерционных сил. Равнодействующая неуравновешенных сил инерции возбуждает импульсы инерционных сил, равных количеству безопорного движения, и может служить движителем транспортных надземных средств (фиг.13, 14).
Способ использования эксцентроидной электрической машины в качестве генератора электрической энергии осуществляется следующим образом.
В установке (фиг.12), содержащей двигатель 30, соединенный приводным валом 31 с эксцентроидной электрической машиной. Приводной вал 31 при этом расположен горизонтально, а инерционные элементы 3 вращаются по эллиптической орбите 2, расположенной в вертикальной плоскости.
Запуск эксцентроидной электрической машины производят с использованием приводного двигателя 30 и после того, как машина выходит в номинальный режим работы, двигатель 30 отключают от внешней сети и запитывают его энергией, получаемой путем взаимодействия магнитной системы ротора свободного вращения 12, размещенной снаружи его полого вала, со статором в виде системы инерционных элементов 3, вращающихся в противоположном направлении. Электрическая энергия, идущая на самообеспечение, то есть на осуществление работы приводного двигателя, поступает на него через систему конденсаторов 34 и инвертор 33.
Энергию дополнительной мощности 39 для потребления получают путем взаимодействия зигзагообразной обмотки 20 ротора принудительного вращения 13 с магнитной системой 16 ротора свободного вращения 12, размещаемой внутри его полого вала 14, используя известные элементы коммутационной цепи: нулевой контакт 36, инвертор 33, систему конденсаторов 34.
Автоматический выключатель 28 отключает внешний источник энергии 29 при вступлении генератора в номинальный режим работы. Электрическая цепь тока самообеспечения 35 эксцентроидной электрической машины включает конденсатор нулевого потенциала 34, преобразователь частоты колебаний тока 33 самообеспечения электродвигателя 30 (силы извне) через автоматический выключатель 28 внешней сети обеспечивает автоматическое переключение движителя на режим самообеспечения 32. Приводной вал 31 в режиме самообеспечения 32 вращает инерционные элементы 3, создавая бегущее магнитное поле статора ротора свободного вращения 12. Отрицательный полюс 36 конденсатора нулевого потенциала обеспечивает эксцентроидную электрическую машину обычным способом.
Способ использования эксцентроидной электрической машины в качестве движителя транспортного средства осуществляется преимущественно в транспортном средстве типа дисколет (фиг.13, 14).
Этот дисколет содержит корпус 42, внутри которого размещена эксцентроидная электрическая машина таким образом, чтобы ее ось была вертикальна, а эллиптическая орбита, по которой вращаются инерционные элементы, находилась в горизонтальной плоскости. Корпус 42 движителя установлен относительно платформы для гашения вибраций и биения от неуравновешенных сил инерции на упругих растяжках (компенсаторах) 41 в виде возвратных пружин, закрепленных на корпусе 42 устройства.
Для управления дисколетом эксцентроидный двигатель 46, размещенный в корпусе 42 дисколета, имеет возможность менять направление равнодействующей неуравновешенных сил инерции направленного действия путем изменения угла направления движения. Работа движителя эксцентроидного типа сопряжена с перемещением центра масс 45 относительно центра тяжести 44 движителя, возбуждающего биение и вибрацию корпуса движителя. Кроме того, импульсы колебаний возбуждают смещение, изменения направления действия магнитных полей, сопровождающееся возбуждением продольных электромагнитных волн в направлении действия инерционных сил движения дисколета. Следовательно, движитель 46 в корпусе 42 дисколета крепится пружинными растяжками 41. Изменение угла направления действия инерционных сил выполняется через пульт дистанционного управления 40 или вручную 48 поворотом корпуса 46 движителя в скользящих опорах 47.
Силу тяги в горизонтальном направлении получают путем взаимодействия эксцентричного вращения инерционных элементов 3 относительно фокуса 43, где располагают ротор свободного вращения 12.
Силу тяги в вертикальном направлении получают путем взаимодействия ротора свободного вращения 12 со статором 10, вращающихся в противоположном направлении.
Силу тяги в заданном направлении получают путем регулирования соотношения между величинами сил тяги как в вертикальном, так и в горизонтальном направлениях.
Получение электрической энергии для самообеспечения, то есть для приводного двигателя, производят путем взаимодействия ротора принудительного вращения 13 с магнитной системой 16, размещенной на внутренней поверхности полого вала 14 ротора свободного вращения 12.
При вертикальном расположении вала генератора инерционного поля в роторе свободного вращения 12, использующем беличье колесо, рамки 19 установлены вертикально, вращающиеся в бегущем магнитном поле левого винта инерционных элементов 3. В рамках, которые пересекаются этим полем, возникает электрический ток с направлением правого винта и появляется электромагнитная сила, образующая магнитное поле правого винта. Одновременно возникает смещение зарядов в рамке - проводнике индуктированной ЭДС, которое возбуждает электромагнитное поле левого винта. В результате этого происходит взаимодействие путем отталкивания этих полей, объединенных потокосцеплением контуров. Происходит противодействие гравитационным силам этого устройства с тенденцией всплытия и зависания в пространстве.
Эксцентроидный движитель дисколета подъемную силу возбуждает ротором свободного вращения 12, индуктированной ЭДС. Смещением зарядов возбуждается магнитное поле. Движение тока, возбуждаемого ротором свободного вращения 12 в рамках беличьего колеса 19, которым возбуждается магнитное поле противоположного вращения магнитному полю индуктированной ЭДС. Взаимодействием электромагнитных полей (-Е>F) происходит отталкивание в сторону большей силы, за счет потокосцепления происходит смещение контуров подъемной силой без изменения координат между магнитными полями (-Е и F).
Силу движения эксцентроидный движитель дисколета обеспечивает геометрической суммой импульсов инерционных сил плюс дельта-энергии в соответствии с патентом РФ 2280513.
Резонанс колебаний потребленного тока (сила извне) должен совпадать по частоте колебаний с пространством или быть кратным 7,5 гц.
Размещение лопастей 8 винтов под углом 15° позволяет, не изменяя конструкцию ротора свободного вращения 12, использовать в дисколете дополнительную подъемную силу. Вращаясь, лопасти винтов усиливают действия полного ускорения инерционных сил, раскручивая ротор свободного вращения до предельно допустимой скорости.

Изобретения относятся к области электротехники, энергетики и транспортного машиностроения, в частности к преобразователям одного вида энергии в другой, и могут быть использованы для снабжения электрической энергией различных потребителей во всех отраслях промышленности и в быту, а также для осуществления перемещения транспортных средств. Технический результат - повышение эффективности работы электрической машины путем обеспечения возможности получения дополнительной энергии, используемой на самообеспечение работы машины в номинальном режиме и на обеспечение потребителей, а также для получения тяги, используемой для обеспечения возможности использования электрической машины в качестве движителя. Предлагаемая эксцентроидная электрическая машина содержит (фиг.1-2) корпус (1), выполненный с внутренним кольцом в виде эллиптической беговой дорожки (2) из диэлектрического материала, статор, выполненный в виде трех инерционных элементов (3), каждый из которых набран из пластин электротехнической стали, содержит ось (4) вращения, выполнен в виде роликов, снабженных с торцов магнитными поясами (5), состоящими из четного количества полуколец разной полярности. Ось (4) вращения каждого из инерционных элементов (3) соединена двумя телескопическими пружинными связями (6) с демпферами (7), установленными симметрично по обе стороны роторной системы, включающей лопасти винтов (8), на общем для статора и ротора приводном валу (9), который размещен эксцентрично относительно геометрической оси эксцентроидной электрической машины. Корпус (1) сбоку закрыт двумя крышками (10), на которых с внутренних сторон установлены эллиптические уголковые направляющие элементы (11), образующие совместно с эллиптической беговой дорожкой (2) эллиптический замкнутый канал для перемещения в нем инерционных элементов (3). Телескопические пружинные связи размещены относительно друг друга под углом 120°. Роторная система эксцентроидной электрической машины (фиг.3-7) состоит из двух роторов: ротора (12) свободного вращения и ротора (13) принудительного вращения, жестко размещенного на приводном валу (9). Ротор (12) свободного вращения содержит полый вал (14), размещенный на подшипниках скольжения (15) концентрично по отношению как к приводному валу, так и к ротору (13) принудительного вращения. Внутри полого вала (14) из ферромагнитного материала размещена система из четного количества постоянных магнитов (16) с чередующимися полюсами, а снаружи своих ободов (17) - магнитные пояса (18), состоящие также из четного количества постоянных магнитов. Магнитные пояса (5) и (18) статора и ротора (12) свободного вращения расположены оппозитно, а постоянные магниты (16) имеют длину, соизмеримую с длиной ротора (13). Каждый из демпферов (7) содержит полое цилиндрическое перфорированное кольцо (21), жестко закрепленное на приводном валу (9) и разделенное внутренними радиальными перегородками (23), между которым в распор установлены компенсационные пружины (24). Концы телескопических пружинных связей (6), размещенные в демпферах, выполнены со ступицами (22), жестко установленными на приводном валу (9), размещены в средней части компенсационных пружин и выходят из демпферов через отверстия в их цилиндрических кольцах. 3 н. и 2 з.п. ф-лы, 14 ил.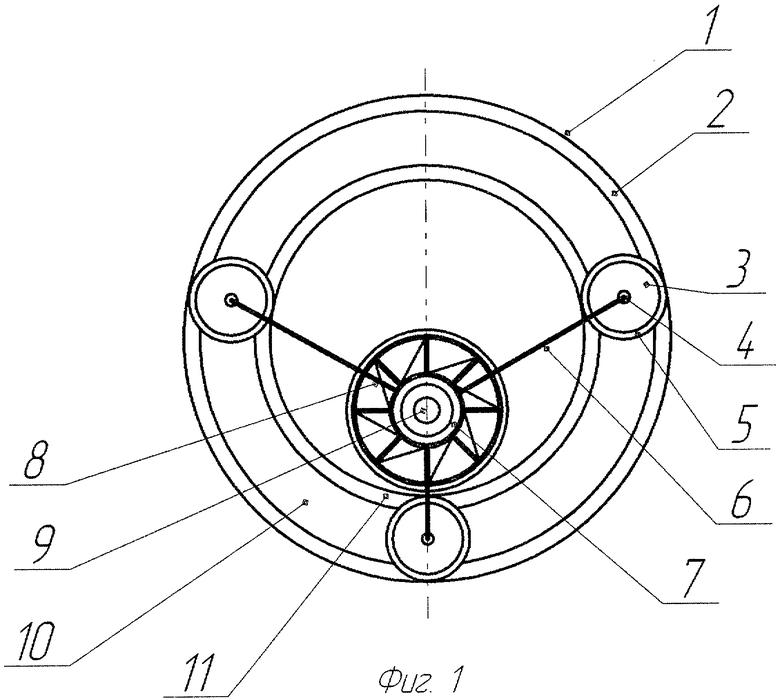
1. Эксцентроидная электрическая машина, содержащая корпус, статор, выполненный с возможностью вращения относительно корпуса, и ротор принудительного вращения, жестко закрепленный на приводном валу генератора, отличающаяся тем, что корпус выполнен с внутренней поверхностью в виде эллиптической беговой дорожки из диэлектрического материала, статор выполнен в виде трех инерционных элементов, каждый из которых набран из пластин электротехнической стали и содержит ось вращения, на которой по обе стороны от инерционного элемента одними концами закреплены телескопические пружинные связи, другие концы которых закреплены в демпферах, жестко установленных на приводном валу симметрично по обе стороны от ротора принудительного вращения, а сами инерционные элементы выполнены в виде роликов, снабженных с торцов магнитными поясами из четного количества полуколец разной полярности, ротор принудительного вращения выполнен в виде керамической втулки, в пазах которой размещена зигзагообразная обмотка, оба конца которой подключены к двум пластинам кольцевого коллектора, размещенного на приводном валу, ось приводного вала размещена эксцентрично относительно малой оси эллипса и находится в одном из его фокусов, дополнительно содержит ротор свободного вращения, полый вал которого размещен концентрично относительно ротора принудительного вращения на подшипниках скольжения, установленных на приводном валу, при этом ротор свободного вращения содержит внутри полого вала систему из четного количества постоянных магнитов с чередующимися полюсами разной полярности, являющихся статором ротора принудительного вращения, а снаружи - систему рамок, равномерно распределенных на внешней поверхности полого вала и снабженных ободами, на которых размещены магнитные пояса, состоящие из четного количества постоянных магнитов чередующейся полярности, причем магнитные пояса статора и ротора свободного вращения расположены напротив друг друга, а телескопические пружинные связи размещены относительно друг друга под углом 120°.
2. Машина по п.1, отличающаяся тем, что каждый из демпферов содержит полое цилиндрическое перфорированное кольцо, жестко закрепленное на приводном валу и разделенное внутренними радиальными перегородками, между которым в распор установлены компенсационные пружины.
3. Машина по п.1 или 2, отличающаяся тем, что концы телескопических пружинных связей, размещенные в демпферах, выполнены со ступицами, жестко установленными на приводном валу, размещены в средней части компенсационных пружин и выходят из демпферов через отверстия в их цилиндрических кольцах.
4. Способ использования эксцентроидной электрической машины в качестве генератора электрической энергии, предусматривающий для получения электрического тока использование генератора, вырабатывающего этот ток при взаимодействии статора и ротора принудительного вращения, вращаемого через приводной вал двигателем, отличающийся тем, что ось эксцентроидной электрической машины располагают в пространстве горизонтально, после выхода генератора в номинальный режим работы приводной двигатель отключают от внешней сети и запитывают его энергией, получаемой путем взаимодействия магнитной системы ротора свободного вращения, размещенной снаружи его полого вала, со статором, вращающихся в противоположных направлениях, а энергию для потребления получают путем взаимодействия ротора принудительного вращения с магнитной системой ротора свободного вращения, размещенной внутри его полого вала.
5. Способ использования эксцентроидной электрической машины в качестве движителя транспортного средства, предусматривающий для получения силы тяги использование движителя, вырабатывающего импульсы инерционных сил, отличающийся тем, что ось эксцентроидной электрической машины располагают в пространстве вертикально, силу тяги в горизонтальном направлении получают путем эксцентричного вращения инерционных элементов относительно фокуса, где располагают ротор свободного вращения, силу тяги в вертикальном направлении получают путем взаимодействия магнитных полей ротора свободного вращения со статором, вращающимся в противоположном направлении, а силу тяги в заданном направлении получают путем регулирования соотношения между величинами сил тяги в вертикальном и горизонтальном направлениях, и дополнительно производят электрическую энергию для самообеспечения путем взаимодействия ротора принудительного вращения с магнитной системой, размещенной на внутренней поверхности ротора свободного вращения.
| КАСАТКИН А.С., НЕМЦОВ М.В., Электротехника | |||
| Учебное пособие для вузов, 4-е издание, переработанное | |||
| - М.: Энергоатомиздат, 1983, 440 с | |||
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ОДНОНАПРАВЛЕННОЕ ПРЕРЫВИСТОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ, СПОСОБ УПРАВЛЯЕМОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2280513C2 |
| Многополюсная электрическая машина постоянного тока | 1983 |
|
SU1108574A1 |
| RU 2075151 С1, 10.03.1997 | |||
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 1995 |
|
RU2089992C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 1995 |
|
RU2089992C1 |
| Способ изготовления шипов | 1929 |
|
SU23073A1 |
| US 7592731 B2, 19.04.2007 | |||
| БЛОКИНГ-ГЕНЕРАТОР | 0 |
|
SU210219A1 |

