Изобретение относится к надводному и наземному транспорту и касается определения оптимального безопасного пути, а также временных параметров движения подвижных объектов в районе с интенсивным движением.
Известны способы определения маршрутов в автоматизированных системах управления движением подвижных объектов, базирующихся на сетевых методах управления, например, системы местоопределения транспортного средства (http://st.ess.ru/publicatios/articles/sputnav.htm), автоматизированная система диспетчерского управления наземным пассажирским транспортом «АСУ-Рейс», система НЭЖАН (http://www.gruzovikpress.ru/article/passenger/2005_05_A_2005_07_06_11_24_27/) АСУ «Автовокзал» (http://www.kisavto.ru/princ.phtml), автоматизированная система диспетчеризации горно-транспортного оборудования (http://www.nvkvist.ru/solutions/gps.htm). Эти методы основаны на использовании специализированных маршрутных сетевых таблиц для планирования маршрутов. Задачи планирования решают в постановке задач теории расписаний. При этом составляют долгосрочные планы и графики движения. При возникновении необходимости изменить маршрут во время движения решение об изменении маршрута принимает водитель подвижного объекта, сообразуясь со своим опытом и интуицией при соблюдении общих требований безопасности движения. К недостаткам этих методов определения траектории (маршрутов) движения относятся следующие:
1) использование маршрутных таблиц требует значительных объемов памяти ЭВМ для хранения;
2) технически невозможно быстро получить запись оптимального маршрута движения и прогнозированных оценок параметров движения и времени в пути;
3) сильное влияние человеческого фактора на процедуру определения траектории в процессе движения, что особенно опасно при движении в районе с интенсивным движением в условиях ограниченной видимости или при наличии плохо различимых объектов (или объектов с плохой отражающей способностью, например, судов);
4) повышенная психоэмоциональная нагрузка на водителя подвижного объекта при движении в районе с интенсивным движением, которая может привести к накоплению усталости и ослаблению внимания в пути;
5) при возникновении ситуации опасного сближения подвижных объектов от водителя требуется быстрая оценка ситуации и быстрое принятие решения, при этом скорость реакции водителя на опасную ситуацию в сильной степени зависит от личностных характеристик водителя подвижного объекта (ПО);
6) использование диспетчерских служб с обязательным участием человека (диспетчера, оператора).
Схема управления во всех случаях однотипная: информация, полученная с радаров, обрабатывает и анализирует диспетчер в Центре управления движением ЦУД (СУДС, Управления полетами). Если диспетчер обнаруживает какую-либо опасность, он связывается с объектом и передает туда информацию. Такая схема имеет ограничения, связанные с человеческим фактором (накапливаемая усталость, снижение внимания при большом числе объектов наблюдения, ошибки в принятии решений и др.). Диспетчер может обеспечить наблюдение и помощь ограниченному числу объектов, находящихся в пределах одного небольшого сектора акватории, который можно контролировать без переключения дисплеев.
Наиболее близким техническим решением к заявляемому является способ управления воздушным движением (Пат. №2134910, опубл. 20.08.1999), в котором путем получения информации о координатах воздушных судов и параметрах их движения с помощью радиолокационного комплекса (РЛК) и средств радиосвязи, вторичной обработки полученной информации в вычислительном комплексе (ВК) автоматизированной системы управления движением, отображения на экране индикатора обстановки информации о движении воздушных судов и об угрозе их столкновения, оценки диспетчером фактических и прогнозируемых интервалов между ними, принятия решения о необходимости и виде вмешательства в движение и управление движением судов с помощью команд, которые передаются экипажу через средства радиосвязи, все воздушные суда, которые находятся в зоне управления, разделяют на три группы, в каждую из которых входят суда, требующие управления с вероятностью, равной нулю, с вероятностью, равной больше нуля, но меньше единицы, и с вероятностью, равной единице. Способ прост и позволяет значительно повысить безопасность полетов и пропускную способность системы управления движением.
Однако в этом способе, принятом за прототип, основная нагрузка в выработке решения лежит на диспетчере, т.е. чрезвычайно сильно влияние человеческого фактора. Кроме того, хотя скорость выработки и доставки управляющего решения достаточно высока, все-таки ее может оказаться недостаточно для быстрого реагирования в случае возникновения опасной ситуации, если учесть инерционность и ограничения, накладываемые техническими возможностями исполнительных механизмов подвижных объектов.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в обеспечении безопасности движения в районах с интенсивным движением транспорта, сокращении времени выработки управляющих решений и упрощении функций диспетчера в управлении движением ПО.
Для достижения указанного технического результата в способе определения траектории и параметров движения подвижных объектов путем получения информации о координатах подвижных объектов и параметрах их движения, вторичной обработки полученной информации в вычислительном комплексе автоматизированной системы управления движением, отображения на экране индикатора обстановки информации о движении подвижных объектов, принятия диспетчером решения о вмешательстве в движение подвижных объектов, дополнительно используют поворотные точки, в т.ч. первую и последнюю поворотные точки в пути следования подвижных объектов, представляющие собой географические координаты на подконтрольной территории, в которых подвижные объекты изменяют направление движения, определяют координаты этих точек с учетом особенностей местности, размещают их на экране индикатора обстановки, присваивают им кодовые номера, соединяют точки дугами и строят граф кодовых пересечений (ГКП), на основании построенного ГКП и с использованием кодовых номеров первой и последней поворотных точек определяют оптимальный по наименьшему числу поворотных точек безопасный путь движения каждого подвижного объекта, включают этот путь в построенный ГКП, рассчитывают с помощью вычислительного комплекса рекомендуемые параметры движения для каждого подвижного объекта, формируют пакет информации с включением в него кодовой записи пути, географических координат поворотных точек, рекомендуемых параметров движения для каждого подвижного объекта, затем передают этот пакет информации на подвижный объект с помощью стандартных средств телекоммуникаций, диспетчер же осуществляет только визуальный контроль обстановки на подконтрольной территории и принимает решение о вмешательстве в движение подвижных объектов только в случае возникновения нештатной ситуации.
В случае невозможности принятия предлагаемого пути производят его перерасчет.
Отличительными признаками предлагаемого способа от способа-прототипа являются использование поворотных точек, в т.ч. первой и последней в пути движения ПО, которые представляют собой географические координаты на контролируемой территории, в них ПО изменяют направление движения, определяют координаты этих точек с учетом особенности местности, размещают их на экране индикатора обстановки, присваивают им кодовые номера, точки соединяют дугами и строят граф кодовых пересечений (ГКП), на основании построенного ГКП и с использованием кодовых номеров первой и последней поворотных точек в пути следования ПО определяют оптимальный по наименьшему числу поворотных точек безопасный путь для каждого ПО, включают его в ГКП, формируют пакет информации с включением в него кодовой записи пути, географических координат поворотных точек, рекомендуемых параметров движения для каждого ПО и передают его на ПО. Диспетчер же осуществляет только визуальный контроль обстановки на подконтрольной территории и принимает решение о вмешательстве в движение ПО только в случае возникновения нештатной ситуации. В случае невозможности принятия предлагаемого оптимального пути водителем ПО производят его перерасчет.
Благодаря наличию этих признаков обеспечивается:
1) безопасность движения в районе с интенсивным движением с помощью использования минимального стандартного набора технических ресурсов в составе навигационного комплекса подвижного объекта (ПО) и средств АИС - автоматизированной информационной (идентификационной) системы без привлечения дополнительных технических ресурсов;
2) эффективность «разведения» подвижных объектов на подконтрольной территории (акватории), которое исключает их опасное сближение;
3) быстрое получение координат поворотных точек оптимального безопасного пути движения ПО с учетом возможности быстрой корректировки пути в процессе его обслуживания;
4) быстрое получение прогнозированной оценки времени в пути при движении по вычисленному пути по предлагаемой ниже формуле;
5) сокращение общего времени в пути за счет сквозного прохода территории;
6) экономия памяти компьютера, т.к. реализация способа не требует наличия и хранения маршрутных таблиц;
7) исключение диспетчера Центра управления движением (ЦУД) из основного контура выработки решения, что в значительной степени уменьшает влияние человеческого фактора на систему; на диспетчера возлагается функция общего контроля ситуации и корректировки решений только в случае возникновения нештатных ситуаций;
8) возможность влияния водителя ПО на процедуру принятия решения (выбор из альтернативных вариантов, принятие, отклонение предложенного маршрута), что обеспечивает реализацию водителем ПО своей ответственности за безопасность движения и не ограничивает его в действиях.
Предлагаемый способ иллюстрируется чертежами, представленными на фиг.1-5.
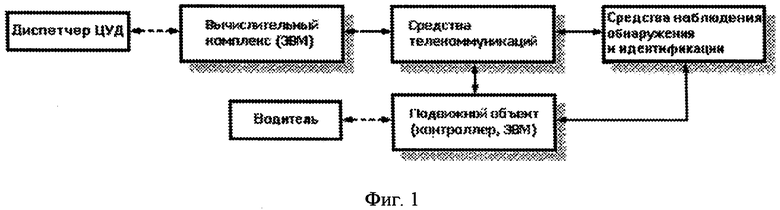
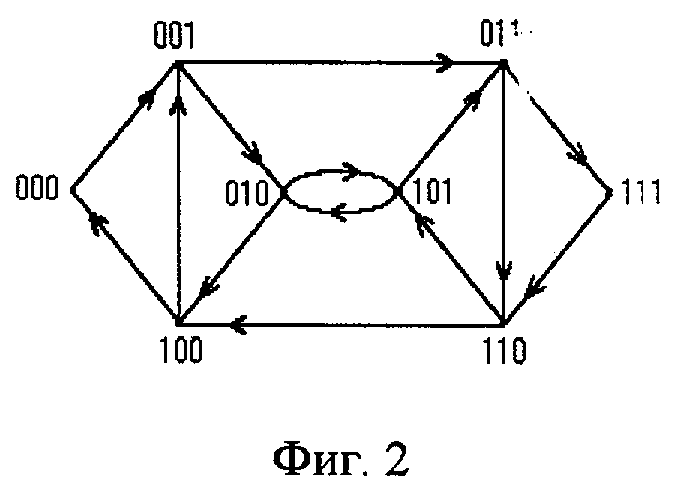
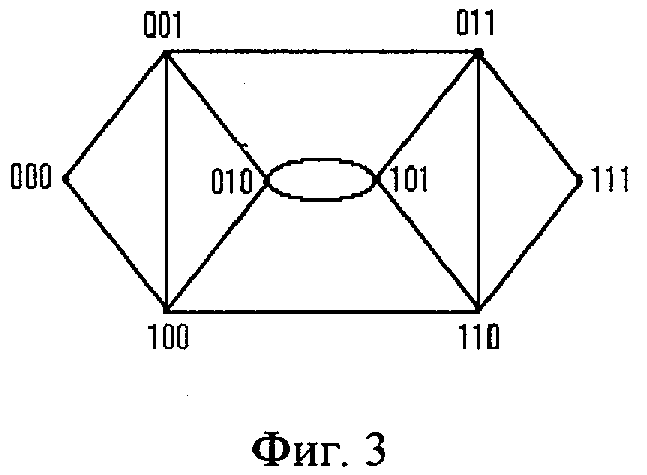
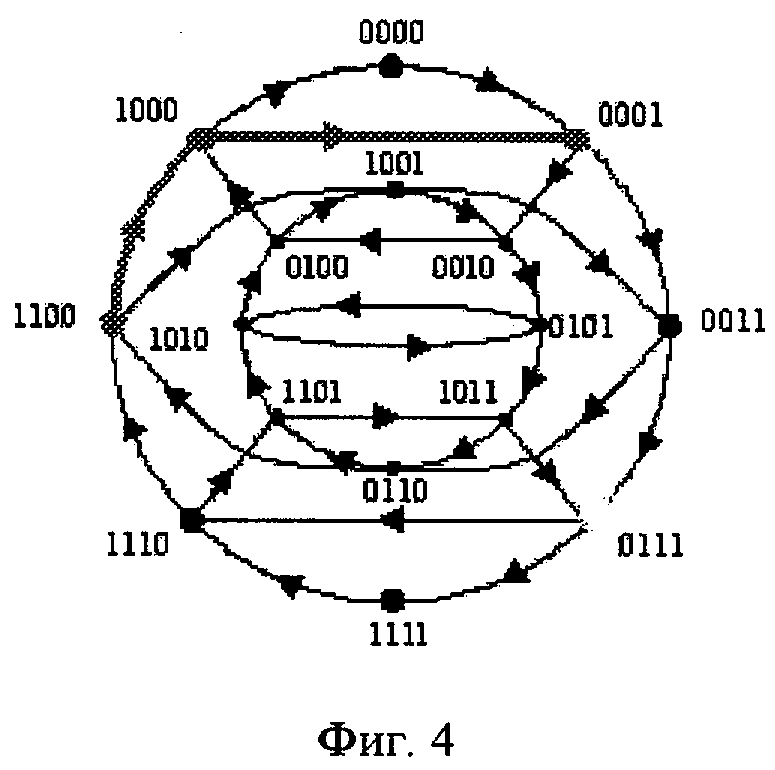
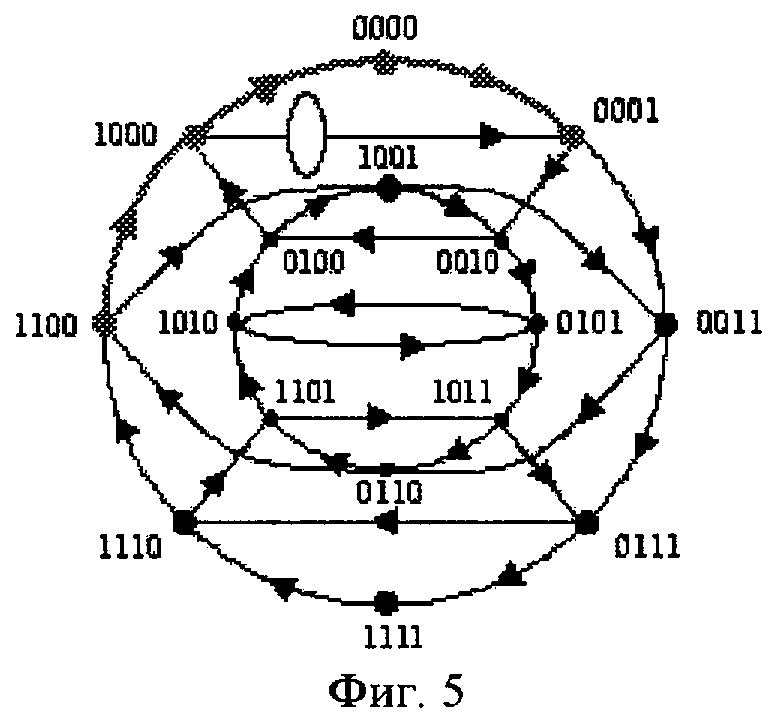
На фиг.1 представлена обобщенная структурная схема управления движением подвижных объектов, на фиг.2 - ориентированный ГКП (3, 2, 1), на фиг.3 - неориентированный ГКП (3, 2, 1), на фиг.4 - определение оптимального пути в ориентированном ГКП, на фиг.5 - корректировка пути в процессе проводки подвижного объекта (судна).
Способ реализуется следующим образом. В автоматизированную систему управления движением подвижных объектов входят следующие основные комплексы (фиг.1): вычислительный комплекс, расположенный в помещении центра управления движением ПО и включающий индикатор обстановки для отображения информации о движении ПО, средства телекоммуникаций, средства наблюдения, обнаружения и идентификации подвижных объектов, вычислительный модуль подвижного объекта (ЭВМ, контроллер), расположенный на последнем. Основные связи в структуре взаимодействия элементов в автоматизированной системе управления движением подвижных объектов показаны сплошной линией, взаимодействие водителя ПО в системе показано пунктирной линией; облегченные функции диспетчера отмечены также пунктирной линией (фиг.1).
Информацию о координатах подвижных объектов и параметрах их движения получают с помощью средств наблюдения, обнаружения и идентификации (РЛС, САРП, ТВ, СНС ГЛОНАСС/GPS, АИС), средств телекоммуникаций (PC, сотовая связь, ГМССБ) и по запросам от водителей ПО, обрабатывают ее в центре управления движением (ЦУД) с помощью вычислительного комплекса (ЭВМ) и отображают на экране электронного индикатора визуального представления данных (дисплей, монитор) обстановки на подконтрольной территории (акватории). Затем дополнительно используют поворотные точки, в т.ч. первую и последнюю поворотные точки, в пути следования подвижных объектов (ПО), их назначают и размещают на карте местности или планшете, определяют их координаты с учетом особенностей местности. Эти точки представляют собой географические координаты на подконтрольной территории, в них подвижные объекты изменяют направление движения. Программным путем формируют математическую модель движения подвижных объектов (ПО), для этого поворотные точки, в т.ч. первую и последнюю в пути следования ПО, размещают на экране индикатора обстановки и присваивают им по специальному правилу кодовые номера в виде набора логических символов «0» и/или «1», соединяют их дугами таким образом, что строят некоторый ориентированный или неориентированный граф кодовых пересечений ГКП (n, k, r) с параметрами: n - длиной кодовых комбинаций номера, k - основанием кода и r - мощностью пересечения кодовых комбинаций номеров или его подграф (фиг.2, 3). Полученный таким образом ГКП является схемой для формализованного определения назначаемых траекторий движений обслуживаемых ПО. Информация о путях ПО заложена в системе нумерации точек. На основании построенного ГКП и с использованием кодовых номеров первой и последней поворотных точек в пути следования ПО определяют программным путем по наименьшему числу поворотных точек оптимальный и безопасный путь движения для каждого ПО, принятого на обслуживание, включают этот путь в построенный ГКП. С помощью вычислительного комплекса рассчитывают рекомендуемые параметры движения (скорость, интервал движения, время в пути), затем формируют пакет информации, в который включают кодовую запись пути, рассчитанные параметры движения для каждого ПО и передают этот пакет информации на ПО с помощью стандартных средств телекоммуникаций. Переданная информация отображается на дисплее ЭВМ подвижного объекта для визуального контроля. В случае, если водитель ПО не может принять предлагаемый путь, он формирует об этом сообщение и отправляет его в ЭВМ ЦУД, программным путем производят перерасчет пути и сообщают об этом водителю ПО. В случае обнаружения средствами контроля обстановки опасного сближения ПО производят корректировку пути и сообщают об этом водителю ПО, информация отображается на дисплее ЭВМ ПО.
Определение оптимального по числу промежуточных поворотных точек пути сводится к выполнению ряда вычислительных процедур над кодовыми комбинациями номеров поворотных точек в траектории движения (вершины графа). Для определения пути ранга l в ГКП (n, k, r) надо, используя кодовые последовательности символов в записи номеров точек движения в ГКП (которые соответствуют двум поворотным точкам - отправления и назначения), составить кодовую последовательность символов. Эта кодовая последовательность представляет собой сокращенную запись пути ранга l. Множество таких последовательностей

где ai,  - кодовые комбинации номеров точек, является множеством путей рангом l, исходящих из вершины N и входящих в вершину N'.
- кодовые комбинации номеров точек, является множеством путей рангом l, исходящих из вершины N и входящих в вершину N'.
При чтении этой последовательности по n символов с шагом r символов получают последовательность номеров точек, составляющих кратчайший путь, который включает (l+1) точек. В случае необходимости изменения траектории движения может быть вычислен путь длиной любой кратности и возможные альтернативные пути.
В зависимости от соотношения параметров ГКП при определении пути возможны два случая.
Случай 1. n≤lr. Имеем n+lr=2n+(lr-n). В этом случае в кодовой последовательности записи пути

ранга l фиксированы первые n символов ε1, ε2, …, εn, соответствующие номеру N (где эта точка на чертеже?) исходящей вершины в ГКП (n, k, r), и последние n символов а'=εlr+1, εlr+2, …, εlr+n, соответствующие номеру N' (на каком чертеже она?) входящей вершины. Подбираем такие значения εn+1, εn+2, …, εlr, чтобы при чтении (2) в соответствующей последовательности (1) не было совпадающих кодовых комбинаций. Для этого проверяем условие

Меняем значения εn+1, εn+2, …, εlr так, чтобы выполнялось (3), получаем множество путей длиной / из N в N'

Очевидно, что это множество может быть пустым.
Случай 2. lr≤n. Номеру N в (2) соответствует ε1, ε2, …, εn, а номеру N' соответствует εlr+1, εlr+2, …, εlr+n. При существовании пути ранга l из N в N' последние n-lr символов N совпадают с первыми n-lr символами N'. Если в последовательности (4), соответствующей (1), все кодовые комбинации различны между собой, то эта последовательность определяет путь длиной l из N в N'.
Задача определения кратчайшего пути из N в N' сводится к определению последовательности (4) наименьшей длины, удовлетворяющей условию (3).
Для демонстрации применения алгоритма определяем кратчайший путь движения ПО (например, судна), следующего из вершины 1100 в вершину 0001 в ориентированном ГКП (4, 2, 1) (фиг.4). В соответствии с алгоритмом в начале определяем число символов в пересечении двух соседних кодовые комбинаций n-r=4-1=3. При существовании пути непосредственно из вершины 1100 в вершину 0001 три последних символа кодовой последовательности 1100 совпадают с тремя первыми символами кодовой последовательности 0001. Это условие не выполняется, следовательно, пути из точки 1100 в точку 0001 длиной l=1 не существует. В этом легко убедиться по чертежу (фиг.4). Вычисляем n-r-1=4-1-1=2. При существовании пути длиной l=2 два последних символа кодовой последовательности 1100 совпадают с двумя первыми символами кодовой последовательности 0001. Замечаем, что это условие выполняется. Следовательно, должен существовать путь длиной l=2 из вершины 1100 в вершину 0001. Для его определения составляем из номеров 1100 и 0001, совместив совпадающие символы, последовательность 110001, которая и является сокращенной записью кода полного пути ранга l=2 из точки 1100 в точку 0001. Читаем эту последовательность слева направо по n=4 символов с шагом в r=1 символов:
Получаем кодовую запись пути; 1100-1000-0001, ранг которого равен 2.
Если повторить эту процедуру снова, то на следующем шаге итерации можно определить кодовую запись пути, ранг которого равна 3 и т.д. Таким образом, можно определить альтернативные пути любой степени кратности.
Пусть в процессе движения судна по выбранному маршруту обнаружено, что полоса движения 1000-0001, входящая в выбранный ранее путь, не может быть использована для движения (например, промысловое судно заблокировало эту полосу). Определяют путь из вершины 1000 в вершину 0001, применив для этого указанную выше процедуру с самого начала. Получают скорректированную кодовую запись пути: 1000-0000-0001 (фиг.5). Указанная процедура корректировки траектории может быть проведена на любом шаге проводки судна.
Значения скоростей, интервалов и среднего минимального времени движения подвижных объектов (судов) рассчитывают в вычислительном комплексе с помощью специальных выражений, заложенных в программе.
К преимуществам предлагаемого способа можно отнести:
1) процедура определения кратчайшего пути проста по технологии, экономична в отношении используемой памяти и не требовательна к системным требованиям вычислительных средств (контроллер, ЭВМ);
2) она может быть выполнена любой рабочей станцией в составе навигационного комплекса, имеющегося на ПО;
3) формализованная процедура не требует специализированных маршрутных сетевых таблиц и освобождает диспетчера ЦУД от участия в выработке решения в штатном режиме;
4) применение способа обеспечивает безопасность движения в районе с интенсивным движением транспорта.
5) использование способа с применением средств АИС обеспечивает своевременную корректировку траектории движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство предотвращения опасного сближения воздушных судов с использованием параллельного смещения | 2022 |
|
RU2785811C1 |
| Способ и устройство для управления движением на аэродроме | 2015 |
|
RU2634502C2 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОПЕРАТИВНОЙ ОБСТАНОВКОЙ НА ЖЕЛЕЗНОЙ ДОРОГЕ, АВТОМАТИЗИРОВАННАЯ СИСТЕМА СЛЕЖЕНИЯ ЗА ОПЕРАТИВНОЙ ОБСТАНОВКОЙ НА ЖЕЛЕЗНОЙ ДОРОГЕ И СИСТЕМА ПЕРЕДАЧИ И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ СЛЕЖЕНИЯ НА ЖЕЛЕЗНОЙ ДОРОГЕ | 2005 |
|
RU2294298C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2001 |
|
RU2177647C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 1999 |
|
RU2157565C1 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ОБЪЕКТОВ В ЗОНЕ ЧРЕЗВЫЧАЙНОЙ СИТУАЦИИ | 2020 |
|
RU2756032C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ МАРШРУТИЗИРОВАННЫМ ТРАНСПОРТОМ | 2005 |
|
RU2305326C2 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
| Способ информационного обеспечения пассажиров общественного транспорта и устройство информационного обеспечения пассажиров общественного транспорта. | 2018 |
|
RU2697496C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА, МАНЕВРОВОГО СОСТАВА ИЛИ ОДИНОЧНОГО ЛОКОМОТИВА ПО СТАНЦИИ И НА ПОДХОДАХ К НЕЙ | 2007 |
|
RU2352487C1 |
Изобретение относится к технике управления движением надводного и наземного транспорта в районах с интенсивным движением. Применяются специальные схемы движения, топологии которых соответствуют графам кодовых пересечений. Выделяют поворотные точки маршрута, присваивают им кодовые номера, кодовые комбинации которых используют при определении оптимального безопасного пути движения подвижного объекта. Для вычисления кода кратчайшего по числу поворотных точек безопасного пути используют две кодовые комбинации - первой и последней поворотных точек, соответствующих заданным географическим координатам следования. Диспетчер осуществляет только визуальный контроль и вмешивается в движение подвижного объекта только в случае возникновения нештатной ситуации. Изобретение направлено на обеспечение безопасности движения, сокращение времени выработки управляющих решений и на упрощение функций диспетчера. 1 з.п. ф-лы, 5 ил.
1. Способ управления движением подвижных объектов, включающий получение информации о координатах подвижных объектов и параметрах их движения, вторичную обработку полученной информации в вычислительном комплексе автоматизированной системы управления движением, отображение на экране индикатора обстановки информации о движении подвижных объектов, принятие диспетчером решения о вмешательстве в движение подвижных объектов, отличающийся тем, что дополнительно используют поворотные точки, в том числе первую и последнюю поворотные точки в пути следования подвижных объектов, представляющие собой географические координаты на подконтрольной территории, в которых подвижные объекты изменяют направление движения, определяют координаты этих точек с учетом особенностей местности, размещают их на экране индикатора обстановки, присваивают им кодовые номера, соединяют точки дугами и строят граф кодовых пересечений (ГКП), на основании построенного ГКП и с использованием кодовых номеров первой и последней поворотных точек определяют оптимальный по наименьшему числу поворотных точек безопасный путь движения каждого подвижного объекта, включают этот путь в построенный ГКП, рассчитывают с помощью вычислительного комплекса рекомендуемые параметры движения для каждого подвижного объекта, формируют пакет информации с включением в него кодовой записи пути, географических координат поворотных точек, рекомендуемых параметров движения для каждого подвижного объекта, затем передают этот пакет информации на подвижный объект с помощью стандартных средств телекоммуникаций, диспетчером же осуществляют только визуальный контроль обстановки на подконтрольной территории и принимают решение о вмешательстве в движение подвижных объектов только в случае возникновения нештатной ситуации.
2. Способ по п.1, отличающийся тем, что в случае невозможности принятия водителем подвижного объекта предлагаемого пути производят его перерасчет.
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 1998 |
|
RU2134910C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ СУДОВ | 1991 |
|
RU2042212C1 |
| US 4789865 A, 06.12.1988 | |||
| US 4768036 A, 30.08.1988. | |||

