Область техники, к которой относится изобретение
Изобретение относится к области воздушного транспорта и может быть использовано в системах организации воздушного движения.
Уровень техники
После внедрения сокращенных минимумов вертикального эшелонирования (RVSM) и появления реальной возможности практического использования глобальной навигационной спутниковой системы (GNSS) возникла необходимость снижения риска столкновений в воздухе. При использовании высотомерного оборудования, обеспечивающего возможность применения RVSM, воздушное судно будет находиться в вертикальной плоскости в среднем в пределах 10 м (33 фут) от заданного местоположения, а при использовании GNSS то же самое воздушное судно в боковом измерении будет находиться в пределах 9 м (30 фут). Очевидным решением проблемы понижения риска вертикального перекрытия в рамках системы, позволяющим обеспечить целевой уровень безопасности полетов, стало уменьшение вероятности вертикального перекрытия за счет восстановления элемента случайности, потеря которого в распределении воздушных судов обусловлена использованием RVSM и GNSS. В результате было внедрено боковое смещение вправо на расстояние до 3,7 км (2 мили). В океаническом воздушном пространстве этот метод уже использовался длительное время.
В [1] указано, что орган ОВД может потребовать от экипажа воздушного судна выполнения полета по смещенной траектории полета с использованием зональной навигации, то есть по линии пути параллельной оси маршрута на заданном расстоянии слева или справа до 35 км (20 миль). Значения смещений должны соответствовать утвержденным минимумам эшелонирования. Данный способ позволяет предотвратить опасное сближение воздушных судов за счет поддержки принятия решений диспетчера в части деконфликтизации с использованием параллельного смещения. Предлагаемый метод соответствует целям Глобального аэронавигационного плана [2].
Известны ключевые показатели эффективности управления воздушным движением [3-5] и характеристики воздушных судов [6]. Существуют рекомендации по осуществлению процедуры оперативного бокового смещения [7]. Известны патенты [8-11] и методы [12-17], недостатком которых является то, что они существенно снижают (до 50%) пропускную способность воздушного пространства при выдерживании безопасных интервалов между воздушными судами.
Известен «Способ управления воздушным движением» (Патент РФ №2236707 МПК: G08G 7/00, опубл. 20.09.2004) [18], заключающийся в получении информации о координатах воздушных судов (ВС) и параметрах их движения, обработки полученной информации в вычислительном комплексе (ВК) автоматизированной системы УВД (АС УВД) и вычислительной машине каждого ВС, отображении на экране индикатора воздушной обстановки информации о движении ВС и об угрозе столкновения ВС, расчете с помощью вычислительного комплекса тенденции изменения параметров полета между каждым ВС и всеми другими ВС, находящимися в зоне УВД, и на основании полученных данных разделении всех ВС, находящихся в зоне УВД, на три группы, причем в первую группу входят ВС, требующие управления с вероятностью, равной нулю, во вторую группу входят ВС, требующие управления с вероятностью, большей нуля, но меньшей единицы, а в третью группу входят ВС, требующие управления с вероятностью, равной единице, отображении на экране индикатора воздушной обстановки ВС этих трех групп и сопровождающей их информации различными цветами, причем ВС второй и третьей групп дополнительно соединяют линиями со шкалой, единица длины которой равна скорости сближения с другими ВС или препятствиями, расчете для ВС второй и третьей групп с помощью ВК АС УВД прогнозируемых продольных, боковых и высотных расстояний в момент их наибольшего сближения с другими ВС или препятствиями, отображении на экране индикатора воздушной обстановки данных расстояний отрезками, снабжении их формуляром сопровождения, на котором отображают информацию о параметрах конфликтной ситуации, при этом отрезок продольного или бокового расстояния в момент наибольшего сближения ВС с другими ВС или препятствиями снабжают шкалой, единица длины которой равна расстоянию, на которое изменится прогнозируемое расстояние при изменении продольной или вертикальной скорости движения ВС на определенную величину, притом, что в нем первоначально информацию о координатах ВС в определенный момент времени и параметрах их движения определяют при помощи спутниковой навигационной системы и/или по данным навигационных систем ВС, затем передают на ВК и в нем производят разделение на три группы всех ВС, после чего определение координат и параметров движения в ВК для ВС, относящихся к третьей группе, производят с периодичностью не менее 2 с, для ВС, относящихся ко второй группе, производят с периодичностью в два раза большей, чем для ВС, относящихся к третьей группе, а для ВС, относящихся к первой группе, производят с периодичностью в четыре раза большей, чем для ВС, относящихся к третьей группе, в дальнейшем на самих ВС производят обработку и отображение полетной информации только для тех ВС, расстояние до которых не превышает 250 км.
Недостатком данного способа является то, что он снижает пропускную способность воздушного пространства при выдерживании ограничений минимальных расстояний между ВС в горизонтальной и вертикальной плоскостях, максимального расхода топлива и максимальной задержки по времени.
Известен «Способ управления движением подвижных объектов» (Патент РФ №2395122 МПК: G08G 7/00, G08G 1/123, опубл. 20.07.2010 бюлл. №20) [19], включающий в себя получение информации о координатах подвижных объектов и параметрах их движения, вторичную обработку полученной информации в вычислительном комплексе автоматизированной системы управления движением, отображение на экране индикатора обстановки информации о движении подвижных объектов, принятие диспетчером решения о вмешательстве в движение подвижных объектов, притом, что дополнительно используют поворотные точки, в том числе первую и последнюю поворотные точки в пути следования подвижных объектов, представляющие собой географические координаты на подконтрольной территории, в которых подвижные объекты изменяют направление движения, определяют координаты этих точек с учетом особенностей местности, размещают их на экране индикатора обстановки, присваивают им кодовые номера, соединяют точки дугами и строят граф кодовых пересечений (ГКП), на основании построенного ГКП и с использованием кодовых номеров первой и последней поворотных точек определяют оптимальный по наименьшему числу поворотных точек безопасный путь движения каждого подвижного объекта, включают этот путь в построенный ГКП, рассчитывают с помощью вычислительного комплекса рекомендуемые параметры движения для каждого подвижного объекта, формируют пакет информации с включением в него кодовой записи пути, географических координат поворотных точек, рекомендуемых параметров движения для каждого подвижного объекта, затем передают этот пакет информации на подвижный объект с помощью стандартных средств телекоммуникаций, диспетчером же осуществляют только визуальный контроль обстановки на подконтрольной территории и принимают решение о вмешательстве в движение подвижных объектов только в случае возникновения нештатной ситуации.
Недостатком данного способа является отсутствие учета ограничения максимального расхода топлива и максимальной задержки ВС по времени.
Наиболее близким по технической сущности к предлагаемому способу является «Способ бокового разрешения конфликтов воздушных судов» (High Performance Conflict Detection and Resolution for Multi-Dimensional Objects / Alexander Kuenz - Gottfried Wilhelm Leibniz Universitat Hannover, 2015. - 236 c.) [20], заключающийся в задании порогов минимальных расстояний сближения ВС в горизонтальной и вертикальной плоскостях, определении координат, путевых углов и скоростей движения ВС, вычислении зависимости трехмерных координат ВС от времени, определении границ области опасного сближения траекторий на величину меньше заданного порога в горизонтальной и вертикальной плоскостях, определении координат сегментов траекторий, находящихся внутри области опасного сближения траекторий, перемещении координат сегментов траекторий с заданным шагом перпендикулярно вправо относительно направлений движения соответствующих ВС пока конфликт между перемещаемыми сегментами траекторий конфликтующих ВС не будет устранен, вычислении точек начала маневра ВС, из которых угол между изначальным положением сегмента траектории и смещенным бесконфликтным будет меньше или равен заданному, управлении движением ВС по вычисленным бесконфликтным траекториям.
Недостаток известного способа заключается в том, что он недостаточно повышает пропускную способность воздушного пространства, при выдерживании ограничений минимально допустимых расстояний между ВС в горизонтальной и вертикальной плоскостях, максимального расхода топлива и максимально допустимого времени движения.
Известна «Система индикации положения» (Патент РФ №2108627 МПК: G08G 5/04, G08G 7/02, опубл. 10.04.1998) [21], позволяющая группе движущихся объектов осуществлять слежение друг за другом, в том числе осуществлять слежение за координатами всех объектов этой группы.
Недостатком данного устройства является недостаточная поддержка решений диспетчера, за счет чего снижается пропускная способность обслуживаемого воздушного пространства.
Наиболее близким по технической сущности к предлагаемому устройству является автоматизированная система управления воздушным движением (Анодина Т.Г., Кузнецов А.А., Маркович Е.Д. Автоматизация управления воздушным движением / Учеб. для вузов; Под ред. А.А. Кузнецова. - М.: Транспорт, 1992, стр. 175-176) [22], включающая в себя: комплекс отображения информации и оперативного управления 1, включающий в себя индикаторы воздушной обстановки; радиолокационный комплекс 2, состоящий из первичных и вторичных радиолокационных станций (РЛС) и аппаратуры обработки информации; вычислительный комплекс (ВК) 3, включающий в себя электронно-вычислительные машины (ЭВМ) для обработки планов полетов и радиолокационной информации, комплекс связи и передачи данных 4, включающий в себя средства радио- и проводной связи, средства передачи радиолокационных данных, средства передачи плановой информации, средства связи с ЭВМ.
Недостатком известного устройства является недостаточная максимальная пропускная способность обслуживаемого воздушного пространства.
Раскрытие сущности изобретения
Задачей предлагаемого изобретения является повышение пропускной способности области воздушного пространства, в которой осуществляется управление воздушным движением используемой системой, с выдерживанием ограничений минимальных расстояний между ВС в горизонтальной и вертикальной плоскостях, и уменьшение расхода топлива.
Данная задача решается в способе за счет того, что с помощью системы управления воздушным движением задают пороги минимально допустимых расстояний сближения ВС в горизонтальной и вертикальной плоскостях, определяют координаты, путевые углы и скорости движения ВС, вычисляют линейные зависимости трехмерных координат ВС от времени, определяют границы области опасного сближения траекторий на величины меньше заданных порогов в горизонтальной и вертикальной плоскостях, определяют координаты сегментов траекторий, находящихся внутри области опасного сближения траекторий, вычисляют точки начала маневра ВС, определяют координаты смещенных сегментов траекторий, из которых угол между изначальным положением сегмента траектории и смещенным бесконфликтным будет меньше или равен заданному, соединяют смещенный сегмент траектории с исходной в вычисленных точках начала маневра, формируют сигналы управления движением ВС по вычисленным бесконфликтным траекториям, причем перед вычислением точек начала маневра ВС, задают длину интервала периодической кусочно-линейной функции зависимости величины бокового смещения от расстояния между текущим положением ВС на траектории и первым ВС потока, с прогнозируемым опасным сближением с ВС из другого потока, задают коэффициенты этой функции, определяют расстояние между текущим положением ВС на траектории и концом предыдущего интервала периодической кусочно-линейной функции, вычисляют величину бокового смещения сегмента траектории ВС, смещают сегмент траектории на данную величину, за счет чего ВС распределяются по диагоналям относительно трасс, находящимся на безопасном расстоянии друг от друга, что позволяет повысить пропускную способность воздушного пространства с выдерживанием ограничений минимальных расстояний между ВС в горизонтальной и вертикальной плоскостях, максимального расхода топлива и максимальной задержки времени возвращения на траекторию.
Указанная задача также решается с помощью устройства для осуществления способа предотвращения опасного сближения воздушных судов с использованием параллельного смещения, которое содержит последовательно соединенные источник информации наблюдения, а именно радиолокационный комплекс, состоящий из первичных и вторичных радиолокационных станций (РЛС) и аппаратуры обработки информации; комплекс отображения информации и оперативного управления, включающий в себя индикаторы воздушной обстановки; вычислительный комплекс (ВК), включающий в себя электронно-вычислительные машины (ЭВМ) для обработки планов полетов и радиолокационной информации, комплекс связи и передачи данных, включающий в себя средства радио- и проводной связи, средства передачи радиолокационных данных, средства передачи плановой информации, средства связи с ЭВМ, причем устройство дополнительно содержит систему поддержки принятия решений диспетчера, включающую в себя ЭВМ для определения рекомендуемых диспетчерских команд, соединенную с радиолокационным комплексом, комплексом отображения информации и оперативного управления, и вычислительным комплексом.
Краткое описание чертежей
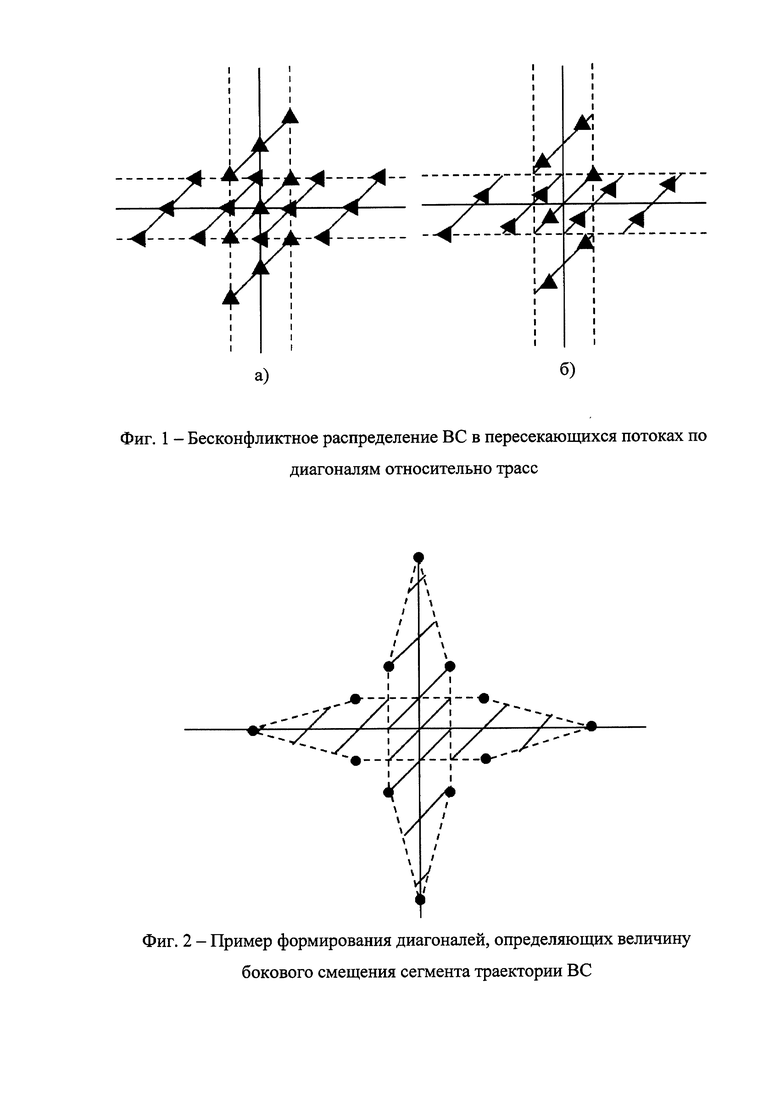
Фиг. 1 - Бесконфликтное распределение ВС в пересекающихся потоках по диагоналям относительно трасс;
Фиг. 2 - Пример формирования диагоналей, определяющих величину бокового смещения сегмента траектории ВС;
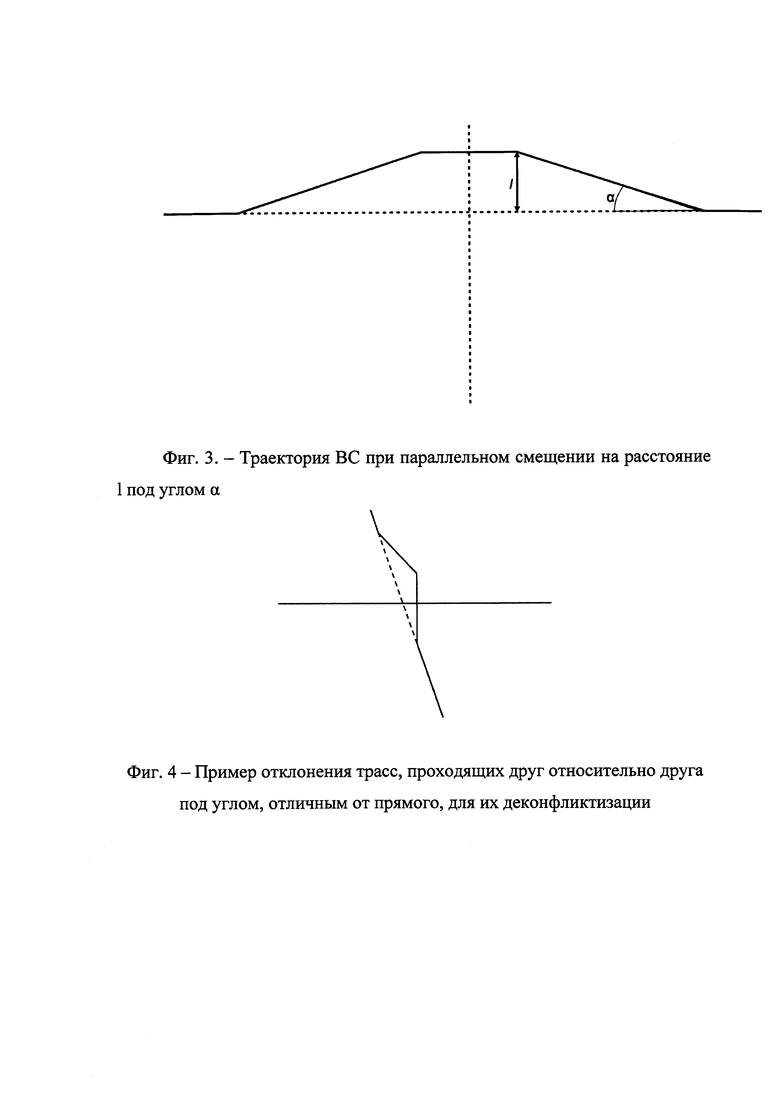
Фиг. 3. - Траектория ВС при параллельном смещении на расстояние 1 под углом α;
Фиг. 4 - Пример отклонения трасс, проходящих друг относительно друга под углом, отличным от прямого, для их деконфликтизации;
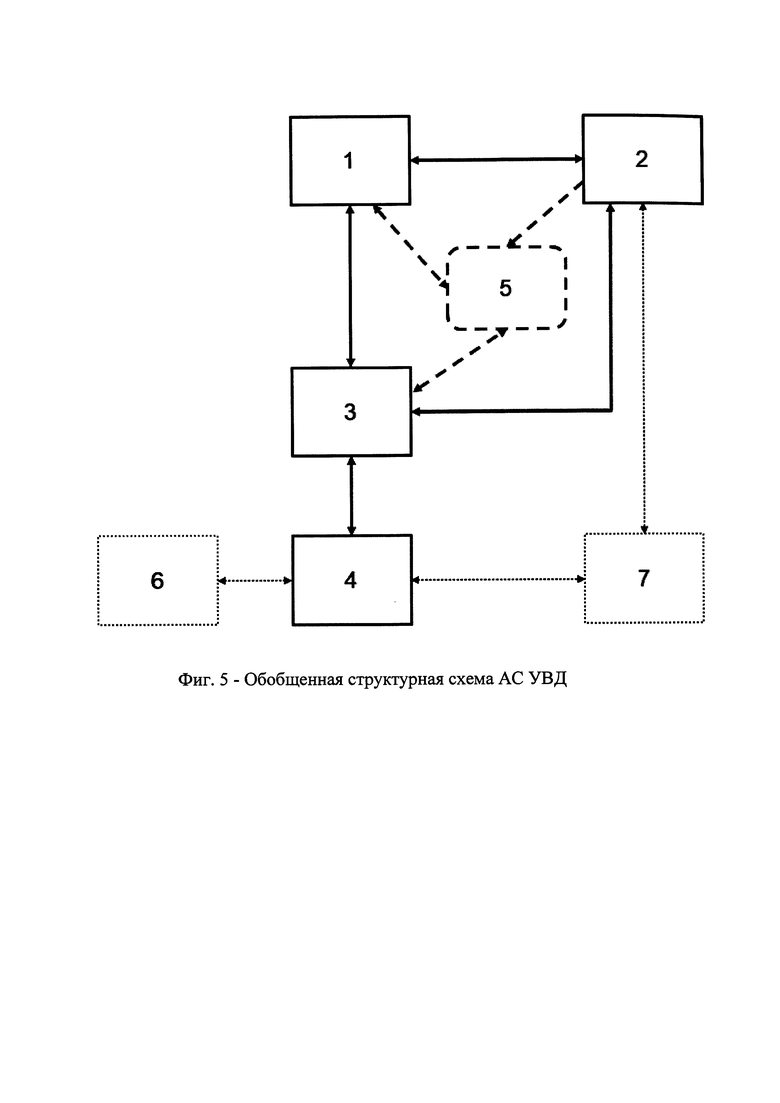
Фиг. 5 - Обобщенная структурная схема АС УВД
Осуществление изобретения
Предлагаемый способ осуществляют следующим образом:
1. С помощью устройства ввода информации, например, клавиатуры, задают пороги минимальных расстояний сближения ВС в горизонтальной и вертикальной плоскостях, длину интервала периодической кусочно-линейной функции зависимости величины бокового смещения от расстояния между текущим положением ВС на траектории и первым ВС потока, и коэффициенты этой функции.
2. Определяют координаты, путевых углов и скоростей движения ВС, вычисляют линейные зависимости трехмерных координат ВС от времени.
3. Определяют границы области опасного сближения траекторий на величину меньше заданного порога в горизонтальной и вертикальной плоскостях.
4. Определяют координаты сегментов траекторий, находящихся внутри области опасного сближения траекторий.
5. Определяют расстояние между текущим положением ВС на траектории и концом предыдущего интервала периодической кусочно-линейной функции.
6. Вычисляют величину параллельного смещения сегмента траектории ВС от трассы  где r - остаток от деления расстояния между первым конфликтующим ВС в потоке и текущим на сумму n норм эшелонирования. По умолчанию n=3.
где r - остаток от деления расстояния между первым конфликтующим ВС в потоке и текущим на сумму n норм эшелонирования. По умолчанию n=3.
При прямом угле между трассами можно использовать функцию
где k - максимальная величина параллельного смещения, rmin - минимально допустимое расстояние между ВС в горизонтальной плоскости.
В таком случае ВС бесконфликтно распределяются по диагоналям относительно трасс, как показано на фиг. 1.
7. Вычисляют точки начала маневра ВС, из которых угол между изначальным положением сегмента траектории и смещенным бесконфликтным будет меньше или равен заданному. Для этого разводить траектории можно начинать заранее на заданном расстоянии rст до точки пересечения траекторий. Расстояние выбирается таким образом, чтобы увеличение пути ВС Δs за счет параллельного смещения от трассы и возвращения на нее было достаточно малым и не приводило к конфликтам с соседними ВС в потоке.
Например, rст = 13 rmin, в таком случае Δs ≈ 0.09rmin.
Пример формирования диагоналей, определяющих величину бокового смещения сегмента траектории ВС, находящихся на безопасном удалении друг от друга при пересекающихся трассах приведен на фиг. 2.
Увеличенная траектория ВС при параллельном смещении на расстояние l под углом α показана на фиг. 3.
Увеличение длины траектории при параллельном смещении ВС рассчитывается по формуле

Исходя из законов тригонометрии увеличение пути при смещении траектории равняется разнице между гипотенузой и катетом прямоугольного треугольника, образованного углом отклонения траектории α и расстоянием параллельного смещения 
Например, при α=4.4 град  Если величина параллельного смещения ВС
Если величина параллельного смещения ВС  составляет полторы нормы эшелонирования, для деконфликтизации дистанция между соседними ВС в потоке должна быть не менее 1.155 норм эшелонирования. Данный результат подтвержден методом имитационного моделирования деконфликтизации пересекающихся потоков ВС.
составляет полторы нормы эшелонирования, для деконфликтизации дистанция между соседними ВС в потоке должна быть не менее 1.155 норм эшелонирования. Данный результат подтвержден методом имитационного моделирования деконфликтизации пересекающихся потоков ВС.
8. Формируют сигналы управления движением ВС по вычисленным бесконфликтным траекториям.
9. Если угол между трассами отличен от прямого, то необходимо отклонить траектории потоков ВС так, чтобы они пересекались под прямым углом, после чего провести деконфликтизацию как при прямом угле (фиг. 4).
Предлагаемый способ наиболее актуален для применения в случае пересечения достаточно интенсивных потоков ВС, когда нежелательно проводить деконфликтизацию изменяя эшелон полета.
В устройстве осуществления способа предотвращения опасного сближения воздушных судов с использованием параллельного смещения последовательно соединены радиолокационный комплекс, состоящий из первичных и вторичных радиолокационных станций (РЛС) и аппаратуры обработки информации; комплекс отображения информации и оперативного управления, включающий в себя индикаторы воздушной обстановки; вычислительный комплекс (ВК), включающий в себя электронно-вычислительные машины (ЭВМ) для обработки планов полетов и радиолокационной информации, комплекс связи и передачи данных, включающий в себя средства радио- и проводной связи, средства передачи радиолокационных данных, средства передачи плановой информации, средства связи с ЭВМ, причем устройство дополнительно содержит систему поддержки принятия решений диспетчера, включающую в себя ЭВМ для определения рекомендуемых диспетчерских команд, соединенную с радиолокационным комплексом, комплексом отображения информации и оперативного управления, и вычислительным комплексом.
На фиг. 5 представлена обобщенная структурная схема устройства, в котором реализуется предлагаемый способ предотвращения опасного сближения воздушных судов с использованием параллельного смещения.
Радиолокационный комплекс 2 обеспечивает получение радиолокационной информации о действительном местоположении воздушных судов 5 и ее первичную обработку. Из радиолокационного комплекса 2 информация поступает либо в комплекс отображения информации и оперативного управления 1, где поступает на индикаторы воздушной обстановки, либо в ЭВМ вычислительного комплекса 3, где подвергается вторичной, а при необходимости и третичной обработке. Далее из вычислительного комплекса 3 информации поступает на индикаторы воздушной обстановки комплекса отображения 1. Комплекс связи и передачи данных 4 обеспечивает обмен информацией между наземными комплексами АС УВД, а также взаимодействие диспетчеров между собой, с экипажами самолетов 6 и со смежными диспетчерскими пунктами 7 [22, 23].
В устройство дополнительно включена система поддержки принятия решений диспетчера 5, включающая в себя ЭВМ для определения рекомендуемых диспетчерских команд, соединенную с радиолокационным комплексом 2, комплексом отображения информации и оперативного управления 1, и вычислительным комплексом 3. Также способ может быть реализован в виде программы для ЭВМ, загруженной на рабочее место диспетчера.
По сравнению с прототипом данное изобретение позволяет проложить бесконфликтные траектории ВС с выдерживанием ограничений минимальных расстояний между ВС в горизонтальной и вертикальной плоскостях, максимального расхода топлива и максимальной задержки времени возвращения на траекторию, повышая пропускную способность воздушного пространства до 80%.
Список литературы
1. ПРИКАЗ Минтранса РФ от 25.11.2011 N 293 "ОБ УТВЕРЖДЕНИИ ФЕДЕРАЛЬНЫХ АВИАЦИОННЫХ ПРАВИЛ "ОРГАНИЗАЦИЯ ВОЗДУШНОГО ДВИЖЕНИЯ В РОССИЙСКОЙ ФЕДЕРАЦИИ"
2. Global Air Navigation Plan 2016-2030. Doc 9750-AN/963, Fifth Edition - 2016 / International Civil Aviation Organization, Canada, 2016, 137 p.
3. ATM Airport Performance (ATMAP) Framework Measuring Airport Airside and Nearby Airspace Performance / Eurocontrol, 2009, 119 p.
4. Manual on Global Performance of the Air Navigation System (Doc 9883), 1st Edition / International Civil Aviation Organization, 2009, 190 p.
5. Global Air Traffic Management Operational Concept. Doc 9854 AN/458 / International Civil Aviation Organization, Canada, 2005, 80 p.
6. AIRCRAFT PERFORMANCE SUMMARY TABLES FOR THE BASE OF AIRCRAFT DATA (BADA), REVISION 3.0, EEC Note No. 10/98 / EUROCONTROL, 1998, 86 p.
7. Внедрение процедур оперативного бокового смещения Cir 331 AN/192 / ИКАО, Канада, 2014 г, 59 с. ISBN 978-92-9249-690-6
8. Пат.2481612 US, МПК G 08 G 7/00. Способ и система управления работой устройства с использованием комплексного моделирования с возможностью временного сдвига / ХОИЗИНГТОН Закари, РОУДОН Блэйн; заявитель и патентообладатель ДЗЕ БОИНГ КОМПАНИ. - №2003108554/09; заявл. 27.03.03; опубл. 10.05.2013, Бюл. №13.
9. Пат. 2310909 Российская Федерация, МПК G08G 7/00. Летно-моделирующий пилотажный комплекс / Л.А. Крючков; заявитель и патентообладатель Федеральное государственное унитарное предприятие "Летно-исследовательский институт им. М.М. Громова". - №2003108554/09; заявл. 2006-06-23; опубл. 20.11.2007, Бюл. №32.
10. Пат. 2134911 Российская Федерация, МПК G08G 7/00. Система предупреждения столкновения летательных аппаратов при летных испытаниях / Е.Г. Харин; заявитель и патентообладатель Федеральное государственное унитарное предприятие "Летно-исследовательский институт им. М.М. Громова". - №2003108554/09; заявл. 1996-09-13; опубл. 20.08.1999, Бюл. №32.
11. Пат. 2108627 SE, МПК G08G 7/00. Система индикации положения / Хокан Ланс; заявитель и патентообладатель Хокан Ланс. - №2003108554/09; заявл. 1992-06-29; опубл. 10.04.1998, Бюл. №32.
12. Alexander Kuenz, Gunnar Schwoch and Franz-Erich Wolter. Individualism in global airspace-user-preferred trajectories in future ATM / 32nd Digital Avionics Systems Conference October 6-10, 2013, Germany, 1-13 pp.
13. Durand, N.; Alliot, J.-M. & Noailles, J., "Automatic Aircraft Conflict Resolution Using Genetic Algorithms", Proceedings of the 1996 ACM Symposium on Applied Computing, ACM, 1996, pp. 289-298.
14. Kelly, W. E. & Eby, M. S., "Advances in Force Field Conflict Resolution Algorithms", AIAA Guidance, Navigation and Control Conference and Exhibit, 2000
15. Roussos, G. P.; Chaloulos, G.; Kyriakopoulos, K. J. & Lygeros, J., "Control of Multiple NonHolonomic Air Vehicles Under Wind Uncertainty Using Model Predictive Control and Decentralized Navigation.
Functions", Proc. 47th IEEE Conf. Decision and Control CDC 2008, 2008, pp. 1225-1230.
16. Dougui, Ν.; Delahaye, D.; Puechmorel, S. & Mongeau, M., "A New Method for Generating Optimal Conflict Free 4D Trajectory", Proc 4th International Conference on Research in Air Transportation, 2010, pp. 185-191
17. Erzberger, H.; Lauderdale, T. A. & Chu, Y.-C, "Automated Conflict Resolution, Arrival Management and Weather Avoidance for ATM", ICAS Proceedings, 2010, 27
18. «Способ управления воздушным движением» (Патент РФ №2236707 МПК: G08G 7/00, опубл. 20.09.2004)
19. «Способ управления движением подвижных объектов» (Патент РФ №2395122 МПК: G08G 7/00, G08G 1/123, опубл. 20.07.2010 бюлл. №20)
20. Alexander Kuenz. High Performance Conflict Detection and Resolution for Multi-Dimensional Objects / Gottfried Wilhelm Leibniz Universitat Hannover, PhD dissertation, German, 2015, 236 p.
21. «Система индикации положения» (Патент РФ №2108627 МПК: G08G 5/04, G08G 7/02, опубл. 10.04.1998 бюлл. №20)
22. Анодина Т.Г., Кузнецов А.А., Маркович Е.Д. Автоматизация управления воздушным движением / Учеб. для вузов; Под ред. А.А. Кузнецова. - М.: Транспорт, 1992, стр. 175-176.
23. Автоматизированные системы управления воздушным движением: Справочник /В. И. Савицкий, В.А. Василенко, Ю.А. Владимиров, В.В. Точилов / Под ред. В.И. Савицкого. - М.: Транспорт, 1986, с. 11-15.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 1998 |
|
RU2134910C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ И СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2004 |
|
RU2280265C2 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2003 |
|
RU2236707C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2020 |
|
RU2746058C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД САМОЛЕТА-ГЕНЕРАТОРА ВИХРЕЙ | 2018 |
|
RU2695249C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ОПАСНУЮ ЗОНУ ВИХРЕВОГО СЛЕДА ГЕНЕРАТОРА ВИХРЕЙ | 2018 |
|
RU2695019C1 |
| Способ предупреждения попадания летательного аппарата в вихревой след самолета-генератора вихрей | 2020 |
|
RU2758526C1 |
| СИСТЕМА АВИАДИСПЕТЧЕРСКОГО КОНТРОЛЯ ЗА ВОЗДУШНЫМ ДВИЖЕНИЕМ В БЛИЖНЕЙ ЗОНЕ АЭРОПОРТА | 2002 |
|
RU2239846C2 |
Группа изобретений относится к способу и устройству для предотвращения опасного сближения воздушных судов (ВС) с использованием параллельного смещения. Для предотвращения опасного сближения ВС задают пороги минимально допустимых расстояний сближения в горизонтальной и вертикальной плоскостях, определяют координаты, путевые углы и скорости движения ВС, вычисляют линейные зависимости трехмерных координат ВС от времени, определяют границы области опасного сближения траекторий на величины меньше заданных порогов в горизонтальной и вертикальной плоскостях, вычисляют бесконфликтные траектории определенным образом, формируют сигналы, несущие информацию о командах управления движением ВС по вычисленным бесконфликтным траекториям. Устройство содержит источник информации наблюдения, комплекс отображения информации и оперативного управления, вычислительный комплекс с ЭВМ, комплекс связи и передачи данных, средства передачи плановой информации и средства связи с ЭВМ, систему поддержки принятия решений диспетчера, соединенные определенным образом. Обеспечивается повышение пропускной способности области воздушного пространства, в которой осуществляется воздушное движение, уменьшение расхода топлива. 2 н.п. ф-лы, 5 ил.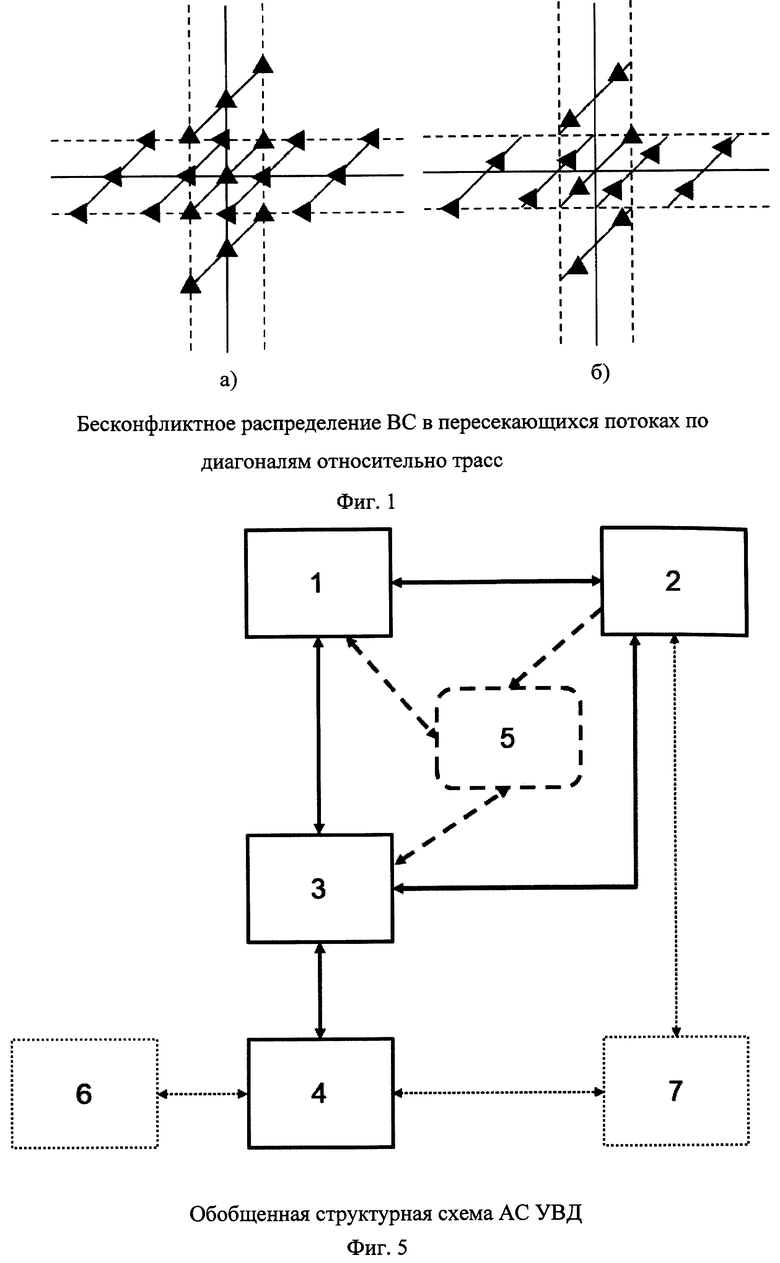
1. Способ предотвращения опасного сближения воздушных судов с использованием параллельного смещения, заключающийся в задании порогов минимально допустимых расстояний сближения (ВС) в горизонтальной и вертикальной плоскостях, при этом определяют координаты, путевые углы и скорости движения ВС, вычисляют линейные зависимости трехмерных координат ВС от времени, определяют границы области опасного сближения траекторий на величины меньше заданных порогов в горизонтальной и вертикальной плоскостях, определяют координаты сегментов траекторий, находящихся внутри области опасного сближения траекторий, вычисляют точки начала маневра ВС, определяют координаты смещенных сегментов траекторий, из которых угол между изначальным положением сегмента траектории и смещенным бесконфликтным будет меньше или равен заданному, соединяют смещенный сегмент траектории с исходной в вычисленных точках начала маневра, формируют сигналы, несущие информацию о командах управления движением ВС по вычисленным бесконфликтным траекториям, отличающийся тем, что перед вычислением точек начала маневра ВС задают длину интервала периодической кусочно-линейной функции зависимости величины бокового смещения от расстояния между текущим положением ВС на траектории и первым ВС потока, с прогнозируемым опасным сближением с ВС из другого потока, задают коэффициенты этой функции, определяют расстояние между текущим положением ВС на траектории и концом предыдущего интервала периодической кусочно-линейной функции, вычисляют величину бокового смещения сегмента траектории ВС и смещают сегмент траектории на данную величину.
2. Устройство для осуществления способа по п. 1, содержащее последовательно соединенные источник информации наблюдения; комплекс отображения информации и оперативного управления, включающий в себя индикаторы воздушной обстановки; вычислительный комплекс (ВК), включающий в себя электронно-вычислительные машины (ЭВМ) для обработки планов полетов и информации наблюдения, комплекс связи и передачи данных, включающий в себя средства радио- и проводной связи, средства передачи информации наблюдения, средства передачи плановой информации и средства связи с ЭВМ, отличающееся тем, что дополнительно содержит систему поддержки принятия решений диспетчера, включающую в себя ЭВМ для определения рекомендуемых диспетчерских команд, соединенную с источником информации наблюдения, комплексом отображения информации и оперативного управления и вычислительным комплексом.
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2757549C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ | 1999 |
|
RU2150752C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА (ЛА) С ПРЕПЯТСТВИЯМИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2428713C2 |
| EP 3695396 A1, 19.08.2020. | |||

