Изобретение относится к области авиации, в частности к способу управления воздушным движением.
Известен способ предупреждения столкновений путем обнаружения опасности столкновения и определения маневров воздушных судов (ВС) по уклонению от столкновений с помощью системы предупреждения столкновений (СПС) и дальнейшего информирования диспетчера и экипажа конфликтующих ВС об опасности и необходимых маневрах [1]. Недостаток данного способа заключается в том, что этот способ предупреждения столкновений не позволяет заблаговременно предупреждать появление конфликтных ситуаций.
Наиболее близким известным решением, выбранным в качестве прототипа, является способ управления воздушным движением (УВД) путем получения информации о координатах воздушных судов (ВС) и параметрах их движения с помощью радиолокационного комплекса (РЛК) и средств радиосвязи, вторичной обработки полученной информации в вычислительном комплексе (ВК) автоматизированной системы УВД (АС УВД), отображения на экране индикатора воздушной обстановки информации о движении ВС и о угрозе столкновения ВС, оценки диспетчером фактических и прогнозируемых интервалов между ними, принятия решения о необходимости и виде вмешательства в движение ВС и управления движением ВС с помощью команд, передаваемых экипажу через средства радиосвязи [2, 4].
Недостатком этого способа является сложность и трудоемкость оценки воздушной обстановки, что проявляется в необходимости проведения диспетчером УВД постоянного анализа взаимного местоположения и параметра движения всех воздушных судов, отображаемых на экране индикатора воздушной обстановки, прогнозирования развития воздушной обстановки, дальнейшей выработке решения о необходимости вмешательства в их движение, а также неточность оценки прогнозируемых интервалов между ВС, которая осуществляется на глаз. Это влечет за собой увеличение вероятности ошибочных действий диспетчера УВД при большой его загруженности (большой интенсивности воздушного движения), уменьшение пропускной способности системы УВД, снижение безопасности полетов.
Целью изобретения является повышение безопасности полетов и увеличение пропускной способности системы УВД путем упрощения и облегчения оценки воздушной обстановки диспетчером УВД.
Указанная цель достигается тем, что в известном способе управления воздушным движением, путем получения информации о координатах воздушных судов (ВС) и параметрах их движения с помощью радиолокационного комплекса (РЛК) и средств радиосвязи, вторичной обработки полученный информации в вычислительном комплексе (ВК) автоматизированной системы УВД (АС УВД), отображения на экране индикатора воздушной обстановки информации о движении ВС и о угрозе столкновения ВС, оценки диспетчером фактических и прогнозируемых интервалов между ними, принятия решения о необходимости и виде вмешательства в движение ВС и управления движением ВС с помощью команд, передаваемых экипажу через средства радиосвязи, по первому пункту изобретения с помощью вычислительного комплекса рассчитывают тенденцию изменения параметров полета между каждым ВС и всеми другими ВС, находящимися в зоне управления воздушным движением, и на основании полученных данных все воздушные суда, находящиеся в зоне управления, разделяют на три группы, причем в первую группу входят ВС, требующие управления с вероятностью, равной нулю, во вторую группу входят ВС, требующие управления с вероятностью, большей нуля, но меньшей единицы, а в третью группу входят ВС, требующие управления с вероятностью, равной единице, на экране индикатора воздушной обстановки ВС этих трех групп и сопровождающую их информацию отображают различными цветами, причем ВС второй и третьей группы дополнительно соединяют линиями со шкалой, единица длины которой равна скорости сближения с другими ВС или препятствиями; по второму пункту для ВС второй и третьей группы с помощью ВК АС УВД рассчитывают прогнозируемые продольные и боковые расстояния в момент их наибольшего сближения с другими ВС или препятствиями, на экране индикатора воздушной обстановки отображают данные расстояния отрезками, снабжая их формуляром сопровождения, на котором отображают информацию о параметрах конфликтной ситуации; причем точку прогнозируемого продольного или бокового расстояния и ВС связывают линией со шкалой; по третьему пункту отрезок продольного или бокового расстояния в момент наибольшего сближения ВС с другими ВС или препятствиями снабжают шкалой, единица длины которой равна расстоянию, на которое изменится прогнозируемое расстояние при изменении продольной или вертикальной скорости движения ВС на определенную величину, например на 10 км/час.
Объединение трех технических решений в одну заявку связано с тем, что три данных способа решают одну и ту же задачу - повышение безопасности полетов принципиально одним и тем же путем - предоставлением дополнительной информации.
Именно заявленное в способе разделение воздушных судов на три группы, отображение их на экране индикатора воздушной обстановки различными цветами, соединение судов второй и третьей группы и других ВС (препятствий) линиями со шкалой, единица длины которой равна скорости сближения с другими ВС (препятствиями); расчет и отображение прогнозируемого расстояния в момент наибольшего сближения воздушных судов с другими воздушными судами или препятствиями, снабжение отрезка продольного или бокового расстояния шкалой обеспечивает согласно способу практически мгновенную оценку воздушной обстановки и принятие решения о необходимости и виде вмешательства в движение воздушных судов и тем самым достижение цели изобретения. Сравнение заявляемого технического решения с прототипом позволило установить соответствие их критерию "новизна". Признаки, отличающие заявляемое техническое решение от прототипа, не выявлены в других технических решениях при изучении данной и смежной области техники и, следовательно, обеспечивает заявляемому решению соответствие критерию "существенные отличия".
На чертежах представлены обобщенная структурная схема АС УВД (фиг. 1), блок-схема алгоритма (фиг. 2), с помощью которых реализован предлагаемый способ, и примеры отображения информации на экране индикатора воздушной обстановки (фиг. 3, 4 и 5).
Предлагаемый способ УВД реализован следующим образом. В АС УВД входят следующие основные комплексы (фиг. 1) [3, 5]: комплекс отображения информации и оперативного управления 1, включающий индикаторы воздушной обстановки; радиолокационный комплекс 2, состоящий из первичных и вторичных радиолокационных станций (РЛС) и аппаратуры обработки информации; вычислительный комплекс (ВК) 3, включающий электронно-вычислительные машины (ЭВМ) для обработки планов полетов и радиолокационной информации, комплекс связи и передачи данных 4, включающий средства радио- и проводной связи, средства передачи радиолокационных данных, средства передачи плановой информации, средства связи с ЭВМ.
Радиолокационный комплекс 2 обеспечивает получение радиолокационной информации о действительном местоположении воздушных судов 5 и ее первичную обработку. Из радиолокационного комплекса 2 информация поступает либо в комплекс отображения информации и оперативного управления 1, где поступает на индикаторы воздушной обстановки, либо в ЭВМ вычислительного комплекса 3, где подвергается вторичной, а при необходимости и третичной обработке. Далее из вычислительного комплекса 3 информации поступает на индикаторы воздушной обстановки комплекса отображения 1. Комплекс связи и передачи данных 4 обеспечивает обмен информацией между наземными комплексами АС УВД, а также взаимодействие диспетчеров между собой, с экипажами самолетов 5 и со смежными диспетчерскими пунктами 6.
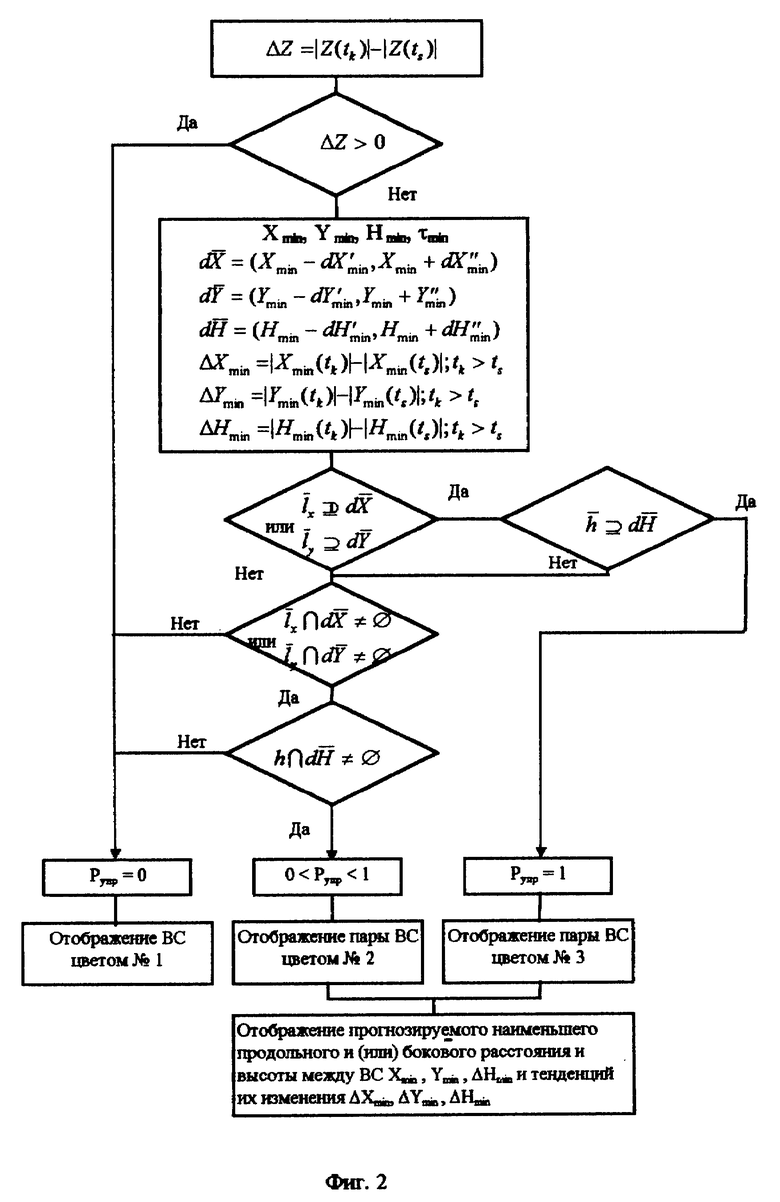
Реализация предлагаемого способа осуществляется в соответствии с алгоритмом, представленным на фиг. 2.
Для каждой пары ВС производится вычисление расстояния между ними ΔZ = |Z(tk)|-|Z(ts)| в моменты времени tk и ts, причем tk > ts. Если расстояние между ВС увеличивается, то ΔZ > 0 и данная пара ВС не требует управления. В этом случае вероятность управления Pупр. = 0.
В случае, если неравенство ΔZ > 0 не выполняется, т.е. если расстояние между ВС уменьшается, производится вычисление величин Xmin и Ymin - прогнозируемых наименьших продольных и боковых расстояний между проекциями ВС на горизонтальную плоскость; Hmin - прогнозируемой высоты между ВС в момент их сближения на наименьшее расстояние в горизонтальной плоскости; τmin - времени до сближения ВС на наименьшее расстояние.
Кроме этого, производится вычисление величин  интервалов возможных значений величин Xmin Ymin и Hmin соответственно, обусловленных наличием погрешностей прогноза и возможными отклонениями параметров движения ВС от заданных (измеренных) значений:
интервалов возможных значений величин Xmin Ymin и Hmin соответственно, обусловленных наличием погрешностей прогноза и возможными отклонениями параметров движения ВС от заданных (измеренных) значений:


где dX'min, dX''min и dY'min, dY''min - максимальные возможные отклонения прогнозируемого наименьшего продольного и бокового расстояния (в горизонтальной плоскости), обусловленные погрешностью прогноза и возможными отклонениями параметров движения ВС от измеренных (заданных) значений;
dH'min и dH''min - максимальные возможные отклонения прогнозируемой высоты между ВС в момент их прогнозируемого сближения на наименьшее расстояние в горизонтальной плоскости.
В общем случае отклонения в разные стороны от прогнозируемого значения в горизонтальной плоскости или по вертикали не равны друг другу, т.е. dX'min ≠ dX''min; dY'min ≠ dY''min и dH'min ≠ dH''min.
Далее вычисляются значения тенденций изменения величин Xmin Ymin и Hmin:
ΔXmin = |Xmin(tk)|-|Xmin(ts)|; tk>ts
ΔYmin = |Ymin(tk)|-|Ymin(ts)|; tk>ts
ΔHmin = |Hmin(tk)|-|Hmin(ts)|; tk>ts
где tk и ts - моменты времени, причем tk > ts.
После этого производится оценка, содержит ли интервал недопустимых значений продольного расстояния  (-lx, lx), бокового расстояния
(-lx, lx), бокового расстояния  (-ly, ly) и высоты
(-ly, ly) и высоты  (-h, h) интервалы
(-h, h) интервалы  где lx, ly и h - установленные руководящими документами продольные, боковые и вертикальные интервалы эшелонирования соответственно. Если интервал недопустимых значений продольного расстояния
где lx, ly и h - установленные руководящими документами продольные, боковые и вертикальные интервалы эшелонирования соответственно. Если интервал недопустимых значений продольного расстояния  содержит интервал возможных значений прогнозируемого наименьшего продольного расстояния между проекциями ВС на горизонтальную плоскость
содержит интервал возможных значений прогнозируемого наименьшего продольного расстояния между проекциями ВС на горизонтальную плоскость  или же интервал недопустимых значений бокового расстояния
или же интервал недопустимых значений бокового расстояния  содержит интервал возможных значений прогнозируемого наименьшего бокового расстояния между ВС
содержит интервал возможных значений прогнозируемого наименьшего бокового расстояния между ВС  (т.е. если
(т.е. если  где символ ⊇ означает отношение включения между интервалами), то производится оценка, содержит ли интервал недопустимых значений высоты
где символ ⊇ означает отношение включения между интервалами), то производится оценка, содержит ли интервал недопустимых значений высоты  интервал возможных значений прогнозируемой высоты между ВС в момент их сближения на наименьшее расстояние в горизонтальной плоскости
интервал возможных значений прогнозируемой высоты между ВС в момент их сближения на наименьшее расстояние в горизонтальной плоскости  выполняется, то вероятность управления данной парой ВС Pупр равна единице (Pупр=1).
выполняется, то вероятность управления данной парой ВС Pупр равна единице (Pупр=1).
В противном случае оценивается, является ли пересечение интервалов  или же пересечение интервалов
или же пересечение интервалов  непустым множеством. Если
непустым множеством. Если  или
или  , где символ
, где символ  означает пересечение интервалов, то производится оценка, пересекаются ли интервалы
означает пересечение интервалов, то производится оценка, пересекаются ли интервалы  Если
Если  то делается вывод о том, что вероятность управления данной парой ВС Pупр больше нуля, но меньше единицы (0 < Pупр < 1).
то делается вывод о том, что вероятность управления данной парой ВС Pупр больше нуля, но меньше единицы (0 < Pупр < 1).
В противном случае делается вывод о том, что вероятность управления данной парой ВС Pупр равна нулю (Pупр = 0).
Чтобы оценить, в какую группу входит ВС, оно анализируется со всеми другими ВС, находящимся в зоне УВД, попарно в соответствии с данным алгоритмом.
В случае, если данное ВС по отношению ко всем другим ВС не нуждается в управлении, то это ВС входит в первую группу ВС. Метка этого ВС и сопровождающая его информация на экране диспетчерского радиолокатора отображается цветом N 1 (например, зеленым - в соответствии с рекомендацией инженерной психологии).
В случае, если по отношению к данному ВС найдется хотя бы одно другое ВС, вероятность управления которым равна 1, то оба этих ВС входят в третью группу и отображаются цветом N 3 (например, желтым).
Если по отношению к данному ВС нет ни одного другого ВС, которое требует управления с вероятностью, равной 1, но найдутся такие ВС, которые вместе с данными ВС требуют управления с вероятностью большей нуля, но меньшей единице, то это ВС входит во вторую группу и отображается цветом N 2 (например, белым).
ВС второй и третьей группы на экране диспетчерского радиолокатора дополнительно соединяют линиями со шкалой, единица длины которой равна скорости сближения с другими ВС или препятствиями.
Согласно второму пункту формулы для ВС второй и третьей группы отображают прогнозируемые продольные и боковые расстояния между ними и другими ВС (или препятствиями) Xmin, Ymin в момент их наибольшего сближения с другими ВС (препятствиями), на экране индикатора воздушной обстановки отображают данные расстояния отрезками, снабжая их формуляром сопровождения, на котором отображают информацию о параметрах конфликтной ситуации. Точку прогнозируемого продольного или бокового расстояния и ВС связывают линией со шкалой. На экране воздушной обстановки отображаются также тенденции изменения наименьших расстояний между ВС ΔXmin, ΔYmin и высоты между ВС ΔHmin. Если величины ΔXmin, ΔYmin и ΔHmin больше нуля, значит имеется тенденция к увеличению соответствующих расстояний.
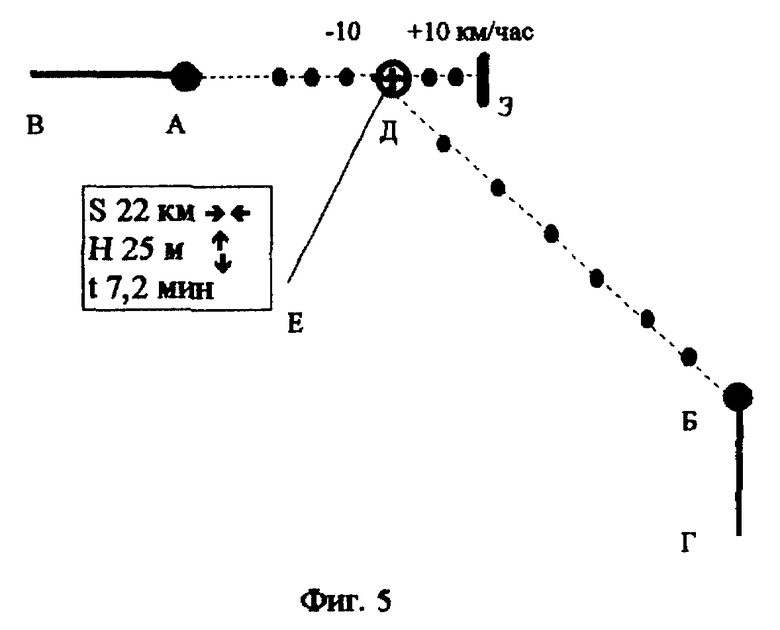
Согласно третьему пункту формулы отрезок продольного или бокового расстояния в момент наибольшего сближения ВС с другими ВС или препятствиями снабжают шкалой, единица длины которой равна расстоянию, на которое изменится прогнозируемое расстояние при изменении продольной или вертикальной скорости движения ВС на определенную величину, например на 10 км/час.
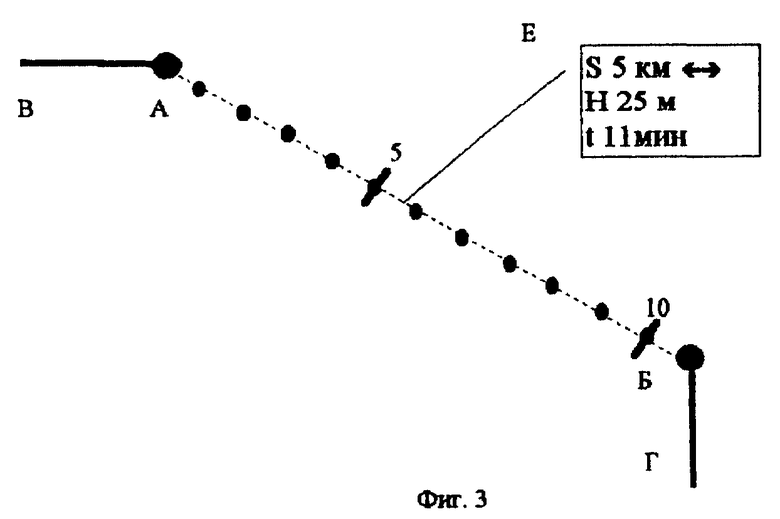
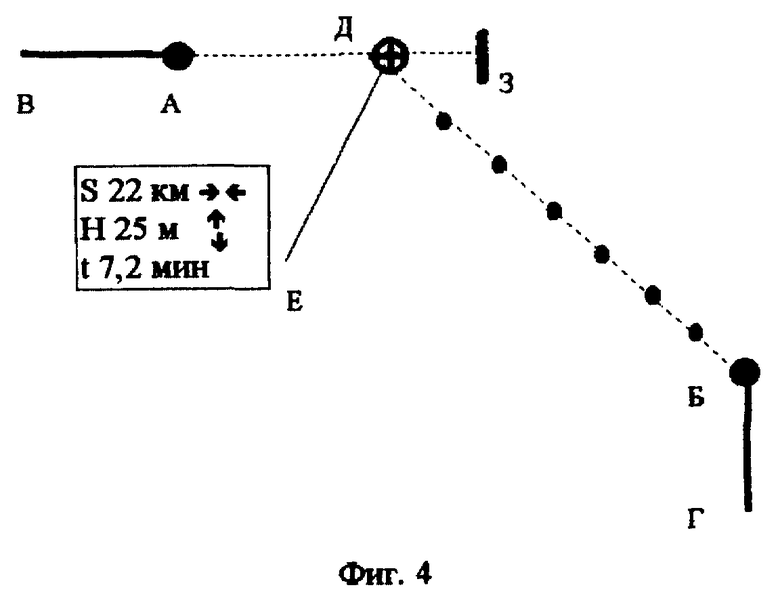
На фиг. 3, 4 и 5 представлены примеры отображения конфликтующих ВС в соответствии с различными пунктами формулы изобретения. В точках А и В находятся отметки воздушных судов. Отрезки ВА и ГБ представляют собой векторы путевых скоростей воздушных судов А и Б соответственно. На фиг. 3 линия АБ соединяет отметки ВС, шкала на линии отображает время до сближения (точки на отрезке БД представляют собой одноминутные метки). На фиг. 4 отрезок АЗ отображает минимальный интервал продольного эшелонирования, заданный руководящими документами. Отрезок АД отображает прогнозируемый продольный интервал между ВС в момент, когда воздушное судно Б окажется на линии пути воздушного судна А. Линия БД направлена вдоль вектора относительной скорости сближения воздушных судов. Шкала ни линии отображает время до момента, когда воздушное судно Б окажется в точке Д. В точке Е находится формуляр сопровождения, на котором, для примера, изображенного на фиг. 4, отображаются: прогнозируемый продольный интервал (длина отрезка АД), равный S = 22 км; тенденция уменьшения этого интервала (горизонтальными сходящимися стрелками); относительная высота между ВС, равная H = 25 м, тенденция увеличения высоты между этим ВС (вертикальными расходящимися стрелками) и время до момента, когда воздушное судно Б окажется в точке Д, равное t = 7.2 минуты. На фиг. 5 изображен пример отображения информации по третьему варианту. Отрезок продольного расстояния АД в момент наибольшего сближения воздушных судов снабжен шкалой, единица длины которой равна изменению прогнозируемого расстояния АД при изменении продольной скорости воздушного судна Б (или же воздушного судна А) на 10 км/час. Таким образом, диспетчер легко может сразу же оценить, как нужно изменить скорости движения воздушных судов А и Б, чтобы не допустить нарушения заданных интервалов эшелонирования. Для примера, изображенного на чертеже, чтобы не допустить конфликтной ситуации, скорость воздушного судна Б необходимо увеличить на 30 км/час или скорость воздушного судна А уменьшить на 30 км/час.
Аналогичным образом отображается шкала при прогнозируемом нарушении безопасных интервалов при снижении или наборе воздушных судов. В этом случае единица длины шкалы равна изменению прогнозируемого интервала между ВС при изменении вертикальной скорости ВС на определенную величину, например на 2 м/с.
Разделение всех воздушных судов на три группы и отображение различных групп воздушных судов различными цветами позволяет диспетчеру УВД упростить оценку воздушной обстановки, сконцентрироваться на управлении только тех воздушных судов, которые нуждаются в управлении, и не отвлекаться на анализ и прогнозирование движения тех воздушных судов, которые заведомо не нуждаются в управлении в данный момент. В случае отсутствия на экране индикатора воздушной обстановки судов, которые нуждаются в управлении (т.е. судов второй и третьей группы), диспетчер с одного взгляда может определить это по цвету экрана. Это избавляет диспетчера от необходимости анализировать местоположение и параметры движения воздушных судов, от необходимости отвлекаться на несущественную информацию в условиях дефицита времени, дает возможность практически мгновенно принять решение о необходимости вмешательства в движение воздушных судов и больше внимания уделять решению важнейших и неотложных задач.
Отображение воздушных судов, требующих управления с вероятностью, равной единице, и воздушных судов, требующих управления с вероятностью, большей нуля, но меньшей единице, дополнительно соединительными линиями со шкалой дает возможность, во первых, сразу же определить причину, из-за которой данные ВС нуждаются в управлении, и, во-вторых, с одного взгляда оценить время, оставшееся до сближения и тем самым облегчить определение оценки момента, когда диспетчеру следует вмешаться в движение воздушных судов.
Отображение на экране воздушной обстановки прогнозируемого расстояния в момент наибольшего сближения воздушного судна с источником опасности, отображение тенденций изменения этого расстояния и отображение информации о конфликте в формуляре сопровождения дает возможность диспетчеру с одного взгляда оценить степень опасностей той или иной ситуации и облегчает принятие решения в УВД.
Отображение на отрезке продольного или бокового расстояния в момент наибольшего сближения ВС с другими ВС или препятствиями шкалой облегчает принятие решения о виде вмешательства.
Все это в комплексе значительно упрощает и облегчает оценку воздушной обстановки, принятие решения о необходимости и виде вмешательства в движения воздушных судов и управление воздушным движением.
Использование заявляемого изобретения позволяет значительно повысить безопасность полетов и пропускную способность системы УВД.
Источники информации:
1. Анодина Т.Г., Кузнецов А.А., Маркович Е.Д. Автоматизация управления воздушным движением / Учеб. для вузов; Под ред. А.А. Кузнецова. - М.: Транспорт, 1992, стр. 141-152.
2. Там же, стр. 38-40, 173-176.
3. Там же, 175-176.
4. Крыжановский Г.А. Введение в прикладную теорию управления воздушным движением: Учебник для вузов гражданской авиации. - М.: Машиностроение, 1984, стр. 64-66.
5. Автоматизированные системы управления воздушным движением: Справочник /В. И. Савицкий, В.А. Василенко, Ю.А. Владимиров, В.В. Точилов;/ Под ред. В. И. Савицкого. - М.: Транспорт, 1986, с. 11-15.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство предотвращения опасного сближения воздушных судов с использованием параллельного смещения | 2022 |
|
RU2785811C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2003 |
|
RU2236707C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ И СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2004 |
|
RU2280265C2 |
| Устройство для контроля занятости взлетно-посадочной полосы | 1990 |
|
SU1709366A1 |
| СПОСОБ ИНДИКАЦИИ УГРОЗ И КОМАНД ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ В ВОЗДУШНОМ ПРОСТРАНСТВЕ | 2008 |
|
RU2373116C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2020 |
|
RU2746058C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ КООРДИНАТНОЙ ИНФОРМАЦИИ ГНСС В ЦЕЛЯХ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2013 |
|
RU2601617C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2020 |
|
RU2746148C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2395122C2 |
Изобретение относится к области авиации, в частности к способу управления воздушным движением. Технический результат изобретения заключается в повышении безопасности полетов и увеличении пропускной способности системы управления воздушным движением. Способ заключается в том, что с помощью вычислительного комплекса (ВК) все воздушные суда, находящиеся в зоне управления, разделяют на три группы, в каждую из которых входят воздушные суда (ВС), требующие управления с вероятностью, равной нулю, с вероятностью, большей нуля, но меньшей единицы, и с вероятностью, равной единице соответственно в каждой группе. На экране индикатора воздушной обстановки ВС этих трех групп и сопровождающую их информацию отображают различными цветами. Для оценки времени сближения конфликтующих ВС их соединяют линиями со шкалой, единица длины которой равна скорости сближения. Кроме того, с помощью ВК рассчитывают и на индикаторе воздушной обстановки отображают прогнозируемые продольные и боковые расстояния между конфликтующими ВС в момент их наибольшего сближения и шкалу, которая отображает степень необходимого для предотвращения конфликта изменения продольной или вертикальной скорости ВС. 2 з.п.ф-лы, 5 ил.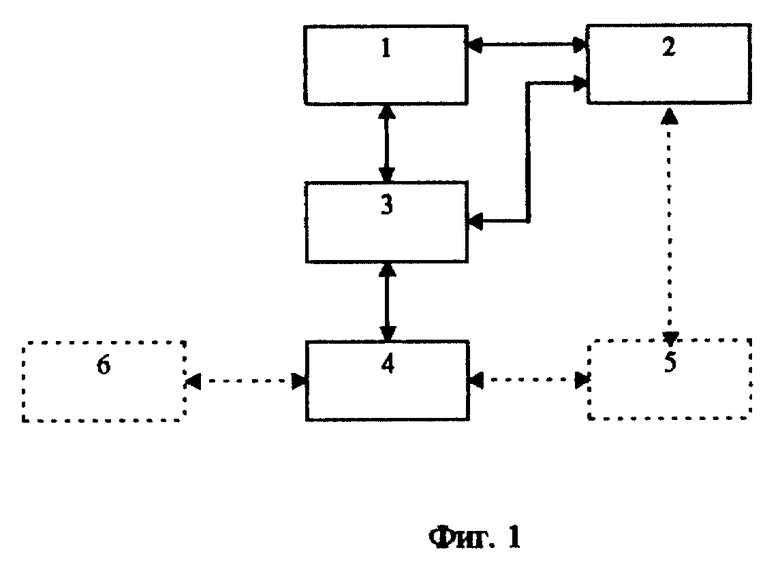
| Анодина Т.Г | |||
| и др | |||
| Автоматизация управления воздушным движением | |||
| - М.: Транспорт, 1992, с.173 - 176, с.38 - 40 | |||
| Крыжановский Г.А | |||
| Введение в прикладную теорию управления воздушным движением | |||
| - М.: Машиностроение, 1984, с.64 - 66 | |||
| МАГНИТОРЕОЛОГИЧЕСКИЙ АМОРТИЗАТОР | 2002 |
|
RU2232316C2 |
| УСТРОЙСТВО ДЛЯ ВЫБОРКИ ОРУДИЙ ЛОВА | 0 |
|
SU283723A1 |
| Анодина Т.Г | |||
| и др | |||
| Автоматизация управления воздушным движением | |||
| - М.: Транспорт, 1992, с.141 - 152 | |||
| Автоматизированные системы управления воздушным движением./ Справочник под ред.В.И.Савицкого | |||
| - М.: Транспорт, 1986, с.11 - 15. | |||

