Изобретения относятся к точному приборостроению, а именно к гироскопической технике, и могут быть использованы в индикаторных гиростабилизаторах.
Известен способ управления индикаторной гироскопической платформой путем подачи управляющего сигнала на датчики момента [1].
Недостатком данного способа является довольно низкая скорость управления платформой.
Известна гироскопическая индикаторная платформа [2], содержащая гироскоп, датчик угла, датчик момента, вход управления платформы, датчики угла платформы, двигатели стабилизации платформы.
Недостатком данного устройства является довольно низкая скорость управления платформой.
Наиболее близким к заявленному является способ, реализуемый в гиростабилизаторе [3], который заключается в подаче на датчик момента гироскопа управляющего сигнала.
Недостатком данного способа является довольно низкая скорость управления платформой.
Наиболее близким к заявленному устройству является гиростабилизатор [2], содержащий платформу, гироскоп, и датчики момента по каждой оси, датчики угла контура стабилизации, двигатель стабилизации, усилитель стабилизации, содержащий последовательно включенные предварительный усилитель, усилитель напряжения и усилитель мощности.
Недостатком данного устройства является низкая скорость управления платформой.
Задачей, на решение которой направлены настоящие изобретения, является повышение скорости управления платформой.
Поставленная задача достигается тем, что в способе управления индикаторной гироскопической платформой, заключающемся в подаче управляющего сигнала на датчики момента гироскопа, согласно изобретению, гироскоп устанавливают на гироскопической платформе таким образом, чтобы оси датчиков момента располагались под углом 45° к осям управления, а сигнал управления подают одновременно на два датчика момента.
В индикаторную гироскопическую платформу, в состав которой входят гироскоп с ротором на сферической опоре и двумя каналами, содержащими дифференциальные датчики угла и два диаметрально противоположно расположенных датчика момента в каждом канале, входы управления платформы, датчики угла платформы и двигатели стабилизации платформы, причем дифференциальные датчики угла гироскопа соединены через усилители стабилизации с соответствующими двигателями стабилизации платформы, согласно изобретению, дополнительно введены суммирующее устройство и вычитающее устройство, причем входы управления платформы подключены к обоим входам суммирующего устройства и к обоим входам вычитающего устройства, выход которого подключен через включенный в прямом направлении диод ко входу первого датчика момента второго канала гироскопа и через включенный в обратном направлении диод ко входу второго датчика момента второго канала гироскопа, а выходы обоих датчиков момента второго канала гироскопа подключены к общему проводу, выход суммирующего устройства подключен через включенный в прямом направлении диод ко входу первого датчика момента первого канала гироскопа и через включенный в обратном направлении диод ко входу второго датчика момента первого канала гироскопа, а выходы обоих датчиков момента первого канала гироскопа подключены к общему проводу.
К существенным отличиям предложенного способа повышения скорости управления относится то, что гироскоп устанавливают на гироскопической платформе таким образом, чтобы оси датчиков момента располагались под углом 45° к осям управления, а сигнал управления подают одновременно на два датчика момента, при этом результирующий момент воздействия на чувствительный элемент гироскопа будет больше в  раз, чем от воздействия одного датчика момента. Скорость управления платформой определяется формулой
раз, чем от воздействия одного датчика момента. Скорость управления платформой определяется формулой
где ω - скорость управления платформой, М - результирующий момент, Н - кинетический момент чувствительности элемента гироскопа.
Согласно приведенной формуле (1) скорость управления платформой ω прямо пропорциональна результирующему моменту М воздействия на чувствительный элемент гироскопа, следовательно скорость увеличится также в  раз.
раз.
В принципе, скорость гироскопа можно повысить, снизив вектор  , но при этом снижается точность гироскопа за счет увеличения дрейфа.
, но при этом снижается точность гироскопа за счет увеличения дрейфа.
К существенным отличиям устройства относится введение в него суммирующего и вычитающего устройств, выходы которых через диоды подключены к датчикам момента, оси которых расположены под углом 45° к осям управления. При таком включении сигналы управления поступают одновременно на два датчика момента, результирующий момент воздействия на чувствительный элемент гироскопа увеличивается в  раз и согласно формуле (1) скорость управления платформой также увеличится в
раз и согласно формуле (1) скорость управления платформой также увеличится в  раз.
раз.
Предлагаемые изобретения иллюстрируются чертежом, где представлены гироскоп 1, дифференциальный датчик 2 угла первого канала гироскопа, дифференциальный датчик 3 угла второго канала гироскопа, первый датчик 4.1 момента, второй датчик 4.2 момента первого канала гироскопа, первый датчик 5.1 момента, второй датчик 5.2 момента второго канала гироскопа, входы 6, 7 управления платформы, датчики 8, 9 угла платформы, двигатели 10, 11 стабилизации платформы, первый и второй усилители 12, 13 стабилизации платформы, суммирующее устройство 14, вычитающее устройство 15, диоды 16, 17, 18, 19, оси управления X 20 и У 21.
Находящийся в непосредственной близости от чувствительного элемента гироскопа 1 дифференциальный датчик 2 угла первого канала гироскопа соединен через первый усилитель 12 стабилизации платформы с двигателем 10 стабилизации платформы. Дифференциальный датчик 3 угла второго канала гироскопа соединен через второй усилитель 13 стабилизации платформы с двигателем 11 стабилизации платформы, входы 6, 7 управления платформы соединены со входами суммирующего устройства 14 и вычитающего устройства 15, выход которого подключен через включенный в прямом направлении диод 18, ко входу первого датчика 5.1 момента второго канала гироскопа и через включенный в обратном направлении диод 19 ко входу второго датчика 5.2 момента второго канала гироскопа, а выходы обоих датчиков 5.1 и 5.2 момента подключены к общему проводу. Выход суммирующего устройства 14 подключен через включенный в прямом направлении диод 16 ко входу второго датчика 4.2 момента первого канала гироскопа и через включенный в обратном направлении диод 17 ко входу первого датчика 4.1 момента первого канала гироскопа, а выходы обоих датчиков 4.1 и 4.2 момента подключены к общему проводу.
Способ управления индикаторной гироскопической платформой осуществляют следующим образом: гироскоп устанавливают на гироскопической платформе таким образом, чтобы оси датчиков 4 и 5 момента располагались под углом 45° к осям управления X 20, У 21, а сигнал управления подают одновременно на два датчика момента. Например, по оси У 21 на датчики 4.1 и 5.1 момента - при управлении в одну сторону, на датчики 4.2 и 5.2 момента - при управлении в другую сторону. Аналогично и по оси X 20 - на датчики 4.1, 5.2 момента - в одну сторону, на датчики 4.2, 5.1 момента - в другую сторону.
Управление индикаторной гироскопической платформой осуществляется следующим образом. При подаче положительного сигнала управления со входа 6 управления платформы на входы суммирующего устройства 14 и вычитающего устройства 15 на их выходах будут присутствовать соответственно положительный сигнал и отрицательный сигнал. Положительный сигнал проходит через включенный в прямом направлении диод 16 и поступает на вход датчика 4.2 момента, а отрицательный - через включенный в обратном направлении диод 19 поступает на вход датчика 5.2 момента, т.е. сигнал управления оказывается поданным одновременно на два датчика 4.2 и 5.2 момента. При векторном сложении сил тяжения датчиков момента и учитывая, что оба датчика повернуты относительно оси управления У 21 на угол 45°, результирующая сила будет в  раз больше, чем сила каждого из датчиков 4.2 и 5.2 момента. При этом управление платформой будет происходить по оси У 21 в одном направлении. При подаче отрицательного сигнала управления со входа управления 6 платформы на входы суммирующего устройства 14 и вычитающего устройства 15 на их выходах будут присутствовать соответственно отрицательный сигнал и положительный сигнал. Отрицательный сигнал проходит через включенный в обратном направлении диод 17 и поступает на вход датчика 4.1 момента, а положительный - через включенный в прямом направлении диод 18 поступает на вход датчика 5.1 момента, т.е. сигнал управления оказывается поданным одновременно на два датчика 4.1 и 5.1 момента. При векторном сложении сил тяжения датчиков момента и учитывая, что оба датчика повернуты относительно оси управления У 21 на угол 45°, результирующая сила будет в
раз больше, чем сила каждого из датчиков 4.2 и 5.2 момента. При этом управление платформой будет происходить по оси У 21 в одном направлении. При подаче отрицательного сигнала управления со входа управления 6 платформы на входы суммирующего устройства 14 и вычитающего устройства 15 на их выходах будут присутствовать соответственно отрицательный сигнал и положительный сигнал. Отрицательный сигнал проходит через включенный в обратном направлении диод 17 и поступает на вход датчика 4.1 момента, а положительный - через включенный в прямом направлении диод 18 поступает на вход датчика 5.1 момента, т.е. сигнал управления оказывается поданным одновременно на два датчика 4.1 и 5.1 момента. При векторном сложении сил тяжения датчиков момента и учитывая, что оба датчика повернуты относительно оси управления У 21 на угол 45°, результирующая сила будет в  раз больше, чем сила каждого из датчиков 4.1 и 5.1 момента. При этом управление платформой будет происходить по оси У 21 в другом направлении. Аналогично происходит управление платформой по оси X 20, при этом в одну сторону управление осуществляется одновременно датчиками 4.2 и 5.1 момента, в другую сторону датчиками 4.1 и 5.2 момента.
раз больше, чем сила каждого из датчиков 4.1 и 5.1 момента. При этом управление платформой будет происходить по оси У 21 в другом направлении. Аналогично происходит управление платформой по оси X 20, при этом в одну сторону управление осуществляется одновременно датчиками 4.2 и 5.1 момента, в другую сторону датчиками 4.1 и 5.2 момента.
В гиростабилизаторе, построенном по индикаторной схеме, в которой гироскоп 1 сам не принимает участие в компенсации возмущающего момента, а используется лишь как чувствительный элемент отклонения стабилизируемой нагрузки от заданного направления в пространстве, компенсация возмущающих моментов возложена на двигатели 10 стабилизации по оси X 20 и 11 по оси У 21, подключенные через усилители 10 и 13 стабилизации к дифференциальным датчикам 2 и 3 угла гироскопа соответственно.
Предложенные изобретения использованы в гиростабилизированной платформе и показали хорошие результаты.
Источники информации
1. В.А.Бесекерский, Е.А.Фабрикант. Динамический синтез систем гироскопической стабилизации. Л., Судостроение, 1968 г., стр.283, 284, 171, 172, рис.6.1.
2. Индикаторные гироскопические платформы под ред. А.Д.Александрова. М., Машиностроение, 1979 г., стр.7-12.
3. Патент РФ №2117915, G01C 19/44, 1998 г.
Изобретения относятся к точному приборостроению, а именно к гироскопической технике, и могут быть использованы в индикаторных гиростабилизаторах. Техническим результатом изобретения является повышение скорости управления платформой. Индикаторная гироскопическая платформа содержит гироскоп, дифференциальные датчики угла первого и второго канала гироскопа, первый и второй датчики момента первого канала гироскопа, первый и второй датчики момента второго каналов гироскопа, входы управления платформы, датчики угла платформы, двигатели стабилизации платформы, первый и второй усилители стабилизации платформы, суммирующее устройство, вычитающее устройство, диоды, оси управления Х и Y. Способ управления индикаторной гироскопической платформой заключается в подаче управляющего сигнала на датчики момента гироскопа. При этом оси датчиков момента располагаются под углом 45° к осям управления. Сигнал управления подают одновременно на два датчика момента. 2 н.п. ф-лы, 1 ил.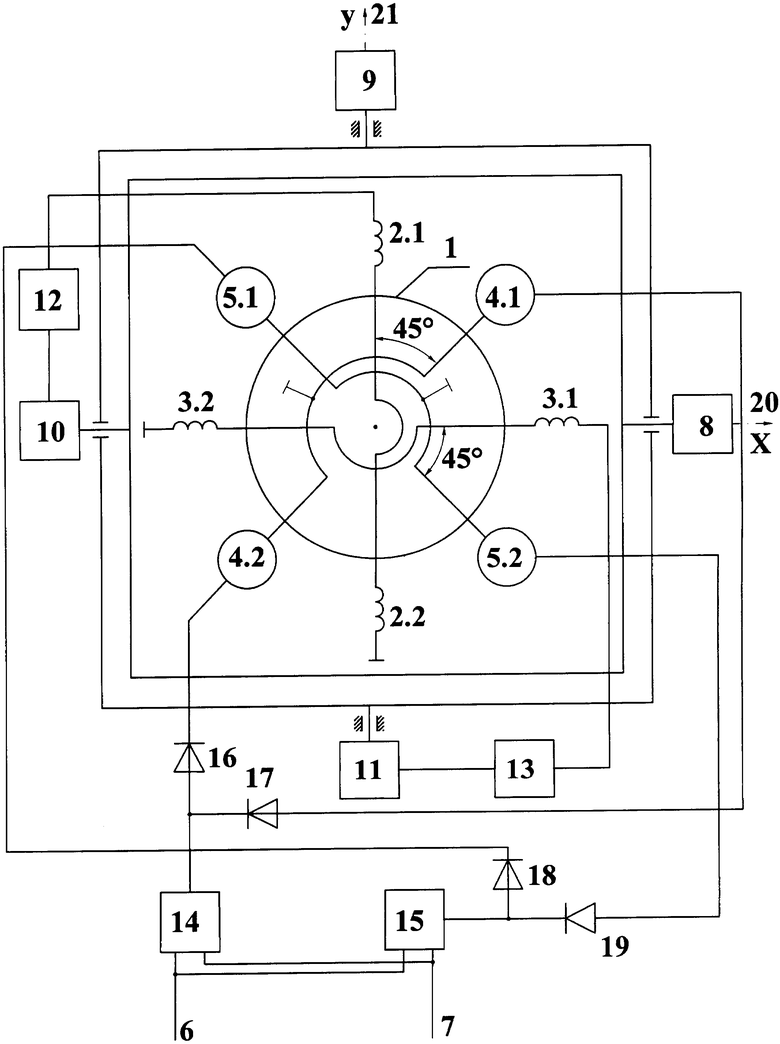
1. Способ управления индикаторной гироскопической платформой, заключающийся в подаче управляющего сигнала на датчики момента гироскопа, отличающийся тем, что гироскоп устанавливают на гироскопической платформе таким образом, чтобы оси датчиков момента располагались под углом 45° к осям управления, а сигнал управления подают одновременно на два датчика момента.
2. Индикаторная гироскопическая платформа, в состав которой входят гироскоп с ротором на сферической опоре и двумя каналами, содержащими дифференциальные датчики угла и два диаметрально противоположно расположенных датчика момента в каждом канале, входы управления платформы, датчики угла платформы и двигатели стабилизации платформы, причем дифференциальные датчики угла гироскопа соединены через усилители стабилизации с соответствующими двигателями стабилизации платформы, отличающаяся тем, что в нее введены суммирующее устройство и вычитающее устройство, причем входы управления платформы подключены к обоим входам суммирующего устройства и к обоим входам вычитающего устройства, выход которого подключен через включенный в прямом направлении диод ко входу первого датчика момента второго канала гироскопа и через включенный в обратном направлении диод ко входу второго датчика момента второго канала гироскопа, а выходы обоих датчиков момента второго канала гироскопа подключены к общему проводу, выход суммирующего устройства подключен через включенный в прямом направлении диод ко входу второго датчика момента первого канала гироскопа и через включенный в обратном направлении диод ко входу первого датчика момента первого канала гироскопа, а выходы обоих датчиков момента первого канала гироскопа подключены к общему проводу.
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| СПОСОБ ПУСКА ГИРОСКОПА ИНДИКАТОРНОЙ ГИРОСКОПИЧЕСКОЙ ПЛАТФОРМЫ И ГИРОСКОПИЧЕСКАЯ ИНДИКАТОРНАЯ ПЛАТФОРМА | 2006 |
|
RU2315264C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| RU 94042298 A1, 20.09.1996 | |||
| US 4472978 A, 25.09.1984. | |||

