Изобретение относится к устройствам управления движением автономных необитаемых подводных аппаратов (АНПА), а именно к приборам управления, использующим информацию от датчиков кинематических параметров и датчиков гидростатического давления. Устройство может применяться в АНПА, предназначенных для исследования акватории дна, поисково-спасательных операций, производственных работ, поражения подвижных и неподвижных объектов.
Существуют аналоги этих устройств, использующиеся в АНПА. Они содержат датчик давления для определения глубины хода АНПА, акселерометры, гироскопы для определения угловых скоростей, линейных ускорений. Результаты измерений этих датчиков поступают на вычислитель, который вырабатывает команды на перекладку горизонтальных и вертикальных рулей подводного аппарата для дальнейшей корректировки движения по курсу (ψ), крену (ϕ) и дифференту (θ) [1, 2, 3, 5].
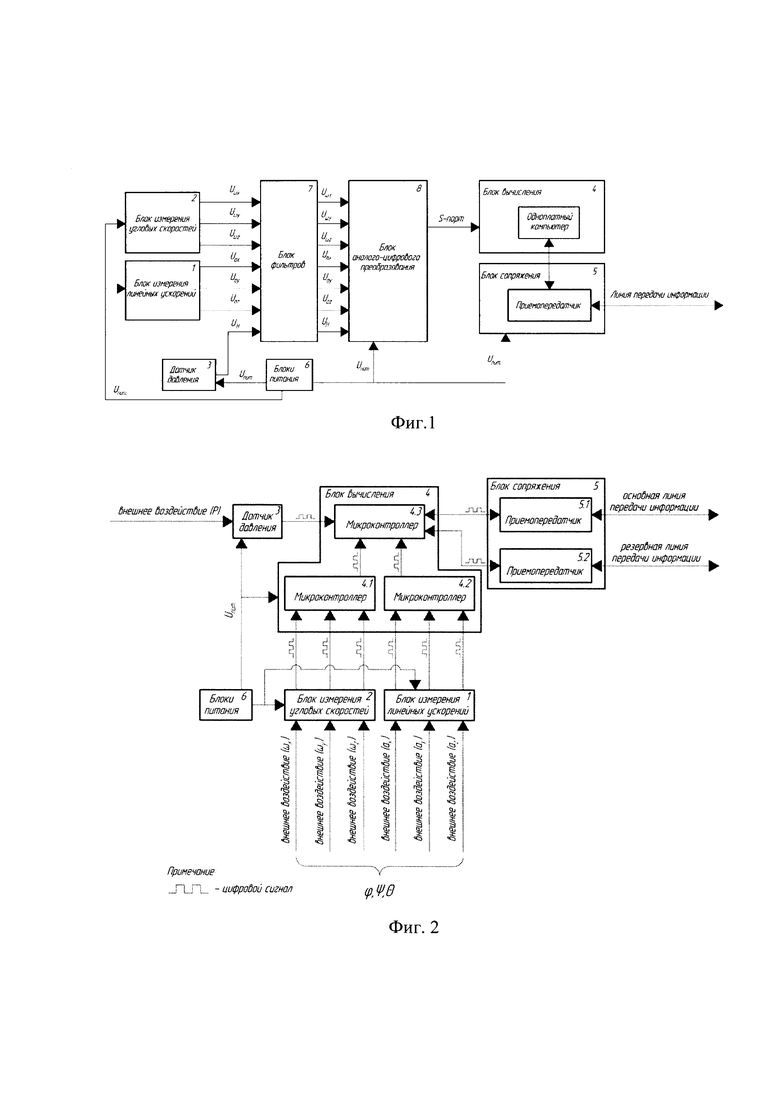
В качестве прототипа выбрано устройство на базе блока приборов управления 2606.000.107 [4], которое выполняет данные функции в АНПА. На фиг. 1 приведена функциональная схема прототипа. Устройство состоит из аналогового блока измерения линейных ускорений (1), аналогового блока измерения угловых скоростей (2), аналогового датчика давления (3), блока вычисления (4) на основе одноплатного компьютера, блока сопряжения (5) с приемопередатчиком с одной линией передачи информации, блоков питания (6), блока фильтров (7), блока аналого-цифрового преобразования (8).
Выходы блока измерения линейных ускорений (1), блока измерения угловых скоростей (2), датчика давления (3) соединены со входом блока фильтров (7), выход блока фильтров (7) соединен со входом блока аналого-цифрового преобразования (8), выход блока аналого-цифрового преобразования (8) соединен со входом блока со входом блока вычисления (4), выход блока вычисления (4) соединен со входом блока сопряжения (5) для обмена информацией с исполнительными устройствами АНПА, блоки питания (6) соединены с блоком измерения линейных ускорений (1), с блоком измерения угловых скоростей (2), с датчиком давления (3), с блоком вычисления (4), с блоком сопряжения (5), с модулем аналого-цифрового преобразования (8).
Блок измерения линейных ускорений (1) и блок измерения угловых скоростей (2) измеряют и выдают в аналоговом виде информацию об угловых скоростях ωх, ωx1, ωy, ωz и линейных ускорениях ах, ау, az АНПА.
Датчик давления (3) служит для измерения и выдачи на глубине погружения АНПА величины гидростатического давления в аналоговом виде.
Блок вычисления (4) является центральным вычислительным органом блока приборов управления, который осуществляет:
- прием и запоминание информации от внешних абонентов, трансляцию ее в агрегаты АНПА по принадлежности;
- расчет заданных установок для выполнения программы автономного движения;
- вычисление кинематических параметров движения (глубины, курса, крена, дифферента и т.д.) по измеренной информации;
- формирование сигналов управления исполнительными механизмами рулевого привода (РП) с использованием информации о заданных и текущих величинах кинематических параметров движения;
- выработка необходимой информации для всех систем АНПА;
- получение необходимой информации от всех систем АНПА;
- прием и выработка разовых команд.
Блок сопряжения служит для организации обмена между блоком вычисления (4) и исполнительными устройствами АНПА по линии передачи информации.
Блоки питания (6) служат для электропитания блока измерения линейных ускорений (1), блока измерения угловых скоростей (2), датчика давления (3), блока вычисления (4), блока сопряжения (5), модуля аналого-цифрового преобразования (8).
Блок фильтров (7) служит для фильтрации и усиления сигналов, поступающих с блока измерения угловых скоростей, блока измерения линейных ускорений и датчика давления.
Блок аналого-цифрового преобразования (8) осуществляет преобразование аналоговых сигналов в цифровой вид, и передает их в блок вычисления (4) для дальнейшей обработки.
Устройство-прототип также, как и аналоги, имеет ряд недостатков, а именно:
- пониженная ударостойкость и вибропрочность чувствительных элементов в составе аналогового блока измерения угловых скоростей;
- за счет особенности конструкции (применения газодинамической опоры) для повышения несущей способности динамически настраиваемых гироскопов (ДНГ), которые используются в блоке измерения угловых скоростей, необходимое минимальное время готовности к работе составляет 2 с, что накладывает некоторые ограничения по времени выхода подводного аппарата из пусковой установки;
- за счет возникновения «сухого трения» в ДНГ, накладываются ограничения по количеству циклов работы ДНГ;
- информация о кинематических параметрах движения изделия из блока измерения угловых скоростей и блока измерения линейных ускорений выдается в аналоговом виде и нуждается в последующей фильтрации и цифровом преобразовании, что ухудшает помехозащищенность и надежность работы БПУ в целом, а также уменьшает бортовое пространство;
- необходимость обеспечивать блок измерения угловых скоростей и блок измерения линейных ускорений электрическим питанием различного значения с фильтрацией, предусматривает применение в блоках питания БПУ ряда источников питания с соответствующими фильтрами, что также приводит к ухудшению помехозащищенности и надежности БПУ;
- большое время запуска блока вычисления - 7 с.
Для устранения этих недостатков необходимо:
- уменьшить время функциональной готовности устройства к работе;
- повысить помехоустойчивость устройства;
- уменьшить энергопотребление устройства.
Для достижения поставленных целей предлагается устройство, представленное на фиг. 2, в котором используются блок измерения линейных ускорений (1), блок измерения угловых скоростей (2), датчик давления (3), построенные на микроэлектромеханических цифровых датчиках, блок вычисления (4), состоящий из трех микроконтроллеров (4.1, 4.2 и 4.3), блок сопряжения (5) с основной и резервной линиями передачи, блоки питания (6).
Существенные признаки, характеризующие изобретение.
Ограничительные: устройство управления движением АНПА, содержит блок измерения линейных ускорений (1), блок измерения угловых скоростей (2), датчик давления (3), блок вычисления (4), соединенный с блоком сопряжения (5), сигнал с которого поступает в исполнительные устройства управления движением автономным необитаемым подводным аппаратом, блок питания (6), соединенный с блоком измерения линейных ускорений (1), блоком измерения угловых скоростей (2), датчиком давления (3), блоком вычисления (4), блоком сопряжения (5).
Отличительные:
1. В качестве блока измерения линейных ускорений (1), блока измерения угловых скоростей (2) и датчика давления (3) используются микроэлектромеханические цифровые датчики, выходы которых соединены с блоком вычисления (4).
2. Блок вычисления (4) выполнен в виде трех микроконтроллеров (4.1, 4.2 и 4.3), на первый микроконтроллер (4.1) поступает цифровой сигнал от блока измерения линейных ускорений (1), цифровой сигнал с первого микроконтроллера (4.1) поступает на третий микроконтроллер (4.3), на второй микроконтроллер (4.2) поступает цифровой сигнал с блока измерения угловых скоростей (2), цифровой сигнал со второго микроконтроллера (4.2) поступает на третий микроконтроллер (4.3), на третий микроконтроллер (4.3) поступает цифровой сигнал с датчика давления (3), цифровой сигнал с третьего микроконтроллера (4.3) поступает на блок сопряжения (5).
3. Блок сопряжения (5) выполнен в виде идентичных приемопередатчиков (5.1 и 5.2) на вход которых поступают сигналы с выхода блока вычисления (4), сигналы с выходов приемопередатчиков (5.1 и 5.2) поступают в исполнительные устройства управления движением автономным необитаемым подводным аппаратом по основной и резервной линии передач информации.
Устройство управления движением автономным необитаемым подводным аппаратом работает следующим образом:
Данные о кинематических параметрах угловых скоростей (ωх, ωy, ωz) и линейных ускорениях (ах, ау, az) формируются в блоке измерения линейных ускорений (1) и блоке измерения угловых скоростей (2), которые затем в цифровом виде считываются микроконтроллерами (4.1 и 4.2). В блоке измерения линейных ускорений (1) и блоке измерения угловых скоростей (2) могут быть использованы МЕМС-гироскопы типа Gyro100-300 [6] и МЕМС акселерометры типа AS200-30 [7]. Микроконтроллеры (4.1 и 4.2) передают текущие значения кинематических параметров в микроконтроллер (4.3). В качестве микроконтроллеров могут быть применены микроконтроллеры типа K1986BE1QI [8]. Датчик давления (3) измеряет величину гидростатического давления (Р) пропорциональную глубине хода и в цифровом виде передает в микроконтроллер (4.3). В качестве датчика давления может быть использован цифровой преобразователь давления типа ИЗМЕРКОН ДИ-33 [9]. Микроконтроллер (4.3), по принятым кинематическим и гидростатическим параметрам, формирует управляющие сигналы, которые поступают в блок сопряжения (5) на вход приемопередатчика (5.1) основной линии передачи информации или на вход приемопередатчика (5.2) резервной линии передачи информации, что позволяет вести непрерывный обмен данными в случае отказа одной из линии передач. Блок сопряжения может быть построен на приемопередатчиках типа 2011ВВ034 по протоколу CAN [10]. Далее приемопередатчик (5.1) или приемопередатчик (5.2) обеспечивает обмен микроконтроллера (4.3) с исполнительными устройствами АНПА для дальнейшей корректировки движения по курсу (ψ), крену (ϕ) и дифференту (θ). Блоки питания (6) обеспечивают электропитанием блок измерения линейных ускорений (1), блок измерения угловых скоростей (2), датчик давления (3), блок вычисления (4) и блок сопряжения (5).
Техническим результатом настоящего изобретения является сокращение времени функциональной готовности до 1 с, уменьшение энергопотребления за счет применения микроэлектронных устройств, повышение помехоустойчивости за счет перехода на цифровую элементную базу и ухода от использования источников питания и фильтров с различными номиналами, повышение надежности работы интерфейса обмена данными за счет использования резервирования каналов, а также уменьшение бортового пространства.
Источники информации
1. Основы динамики торпед. Под редакцией Скобова Д.П. Книга вторая. - Л: Судпромгиз, 1964.
2. Патент РФ №188509. Блок приборов управления для необитаемых подводных аппаратов. МПК B63G 8/00. Заявл. 04.09. 2018, опубл. 16.04.2019.
3. Боженов Ю.А., Борков А.П., Гаврилов В.М., Жуков Ю.И., Иконников И.Б., Постников И.В., Соловьев В.И., Ушенин Л.Н., Филиппов Д.Н. Самоходные необитаемые подводные аппараты. - Ленинград: Судостроение, 1986. - 264 с.
4. Блок приборов управления 2606.000.107ТО. Техническое описание. Санкт-Петербург: изд. АО «Концерн «МПО-Гидроприбор», 2010. - 120 с.
5. Подводное Морское Оружие. Научно-технический сборник, 9. - Санкт-Петербург: изд. АО «Концерн «МПО-Гидроприбор», 2007. - 52 с.
6. MEMS Gyroscope Gyro 100-300. Technical Manual. - Уси: изд. Wuxi Bewis Sensing Technology LLC, 2020. - 7 c.
7. MEMS Accelerometer AS200-30. Technical Manual [Текст]. - Уси: изд. Wuxi Bewis Sensing Technology LLC, 2020. - 7 c.
8. Микросхема 32-разрядной микро-ЭВМ с Ethernet интерфейсом ТСКЯ.431296.008СП. Спецификация. - Зеленоград: изд. АО «ПКК Миландр», 2020. - 451 с.
9. Преобразователи давления измерительные ИЗМЕРКОН СД2.832.097 РЭ. Руководство по эксплуатации. - Санкт-Петербург: изд. ЗАО «Тимос», 2017. - 49 с.
10. Микросборка приемопередатчика по стандарту CAN с гальванической развязкой ТСКЯ.431323.016-02СП. Спецификация. - Зеленоград: изд. АО «ПКК Миландр», 2020. - 19 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| БАЛОЧНЫЙ ДЕРЖАТЕЛЬ | 2012 |
|
RU2521446C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ПЕРЕДАЧИ ИНФОРМАЦИИ О СОСТОЯНИИ ПОДВОДНОЙ ЛОДКИ | 2021 |
|
RU2769806C1 |
| Бортовая система прогноза гидрофизических параметров | 2015 |
|
RU2626211C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| КРЫЛАТАЯ РАКЕТА С АВТОНОМНЫМ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ-МИНОЙ | 2018 |
|
RU2714274C2 |
| Способ и комплекс управления электроэнергетическим питанием автономного необитаемого подводного аппарата большой автономности с гибридной энергетической установкой | 2024 |
|
RU2828130C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| Способ контроля маршрута движения автономного необитаемого подводного аппарата с возможностью съёма технической информации и устройство для его реализации | 2018 |
|
RU2713516C2 |
| СПОСОБ ЗАЩИТЫ ОХРАНЯЕМОЙ АКВАТОРИИ ОТ ПОДВОДНЫХ ДИВЕРСАНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269449C1 |
Изобретение относится к устройствам управления движением автономных необитаемых подводных аппаратов, а именно к приборам управления, использующим информацию от датчиков кинематических параметров и датчиков гидростатического давления. В устройстве управления используются блок измерения линейных ускорений, блок измерения угловых скоростей, датчик давления, построенные на микроэлектромеханических цифровых датчиках, блок вычисления, состоящий из трех микроконтроллеров, блок сопряжения с основной и резервной линией передачи информации и блок питания. Сокращается время функциональной готовности к выполнению алгоритмов управления подводным объектом, уменьшается энергопотребление, повышается помехоустойчивость. 2 з п. ф-лы, 2 ил.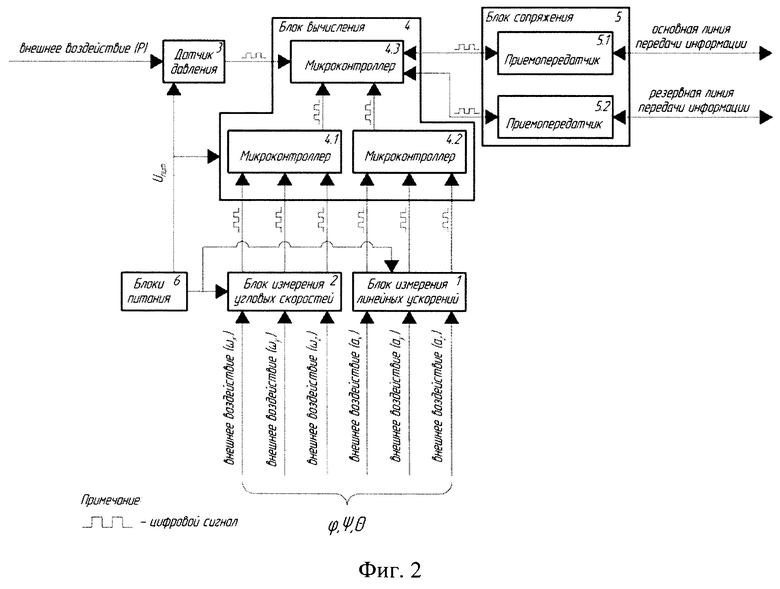
1. Устройство управления движением автономного необитаемого подводного аппарата, содержащее блок измерения линейных ускорений (1), блок измерения угловых скоростей (2), датчик давления (3), блок вычисления (4), соединенный с блоком сопряжения (5), сигнал с которого поступает в исполнительные устройства управления движением автономного необитаемого подводного аппарата, блок питания (6), соединенный с блоком измерения линейных ускорений (1), блоком измерения угловых скоростей (2), датчиком давления (3), блоком вычисления (4), блоком сопряжения (5), отличающееся тем, что в качестве блока измерения линейных ускорений (1), блока измерения угловых скоростей (2) и датчика давления (3) используются микроэлектромеханические цифровые датчики, выходы которых соединены с блоком вычисления (4).
2. Устройство по п. 1, отличающееся тем, что блок вычисления (4) выполнен в виде трех микроконтроллеров (4.1, 4.2 и 4.3), на первый микроконтроллер (4.1) поступает цифровой сигнал от блока измерения линейных ускорений (1), цифровой сигнал с первого микроконтроллера (4.1) поступает на третий микроконтроллер (4.3), на второй микроконтроллер (4.2) поступает цифровой сигнал с блока измерения угловых скоростей (2), цифровой сигнал со второго микроконтроллера (4.2) поступает на третий микроконтроллер (4.3), на третий микроконтроллер (4.3) поступает цифровой сигнал с датчика давления (3), цифровой сигнал с третьего микроконтроллера (4.3) поступает на блок сопряжения (5).
3. Устройство по п. 1, отличающееся тем, что блок сопряжения (5) выполнен в виде идентичных приемопередатчиков (5.1 и 5.2), на вход которых поступают сигналы с выхода блока вычисления (4), сигналы с выходов приемопередатчиков (5.1 и 5.2) поступают в исполнительные устройства управления движением автономного необитаемого подводного аппарата по основной и резервной линиям передач информации.
| СПОСОБ ПОЛУЧЕНИЯ РЕЗОРЦИНА | 0 |
|
SU188509A1 |
| УСТРОЙСТВО для ВЫГРУЗКИ КАТАЛИЗАТОРА ИЗ КОНТАКТНЫХ АППАРАТОВт\:.^^л':1Г'::.":f»ii)/.^.: 1 .::.'\ | 0 |
|
SU192180A1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход | 2018 |
|
RU2687844C1 |
| Мобильная распределённая система подводного наблюдения | 2021 |
|
RU2767384C1 |
| Способ приведения автономного необитаемого подводного аппарата | 2016 |
|
RU2616446C1 |
| WO 2008037268 A1, 03.04.2008 | |||
| JP 2013173436 А, 05.09.2013. | |||

