Изобретения относятся к точному приборостроению, а именно к гироскопической технике, и могут быть использованы в индикаторных гиростабилизаторах.
Задача управления гиростабилизатором возникает при необходимости разворота стабилизированной платформы по какому-либо закону относительно некоторой системы координат к заданному углу.
Известен способ [1] управления платформой путем подачи управляющего сигнала в датчики момента гироскопа.
Недостатком данного способа является разница скоростей управления каналов платформы из-за неодинаковых параметров датчиков момента гироскопа, что приводит к неточности приведения платформы к заданному углу.
Известна гироскопическая индикаторная платформа [1], содержащая гироскоп, датчики угла и датчики момента гироскопа, вход управления платформы, двигатели стабилизации платформы.
Недостатком данного устройства является отсутствие регулировки скоростей управления платформой, что приводит к неточности приведения платформы к заданному углу.
Наиболее близким к заявленному способу является способ [2], реализуемый в гиростабилизаторе, который заключается в подаче управляющего сигнала на датчики момента гироскопа.
Недостатком данного способа является разница скоростей управления платформой и наличие дополнительной скорости в перекрестном канале, что приводит к неточности приведения платформы к заданному углу.
Наиболее близким к заявленному устройству является гироскопическая индикаторная платформа [2], содержащая платформу, гироскоп, два датчика момента по каждой оси, причем оси датчиков момента развернуты относительно осей платформы на 45°, датчики угла контура стабилизации, двигатели стабилизации по каждой оси, усилители стабилизации по каждому каналу. Недостатком данного устройства является отсутствие регулировки скоростей управления платформой, что приводит к неточности приведения платформы к заданному углу.
Техническим результатом изобретений является повышение точности приведения платформы к заданному углу и снижение трудоемкости изготовления гиростабилизатора за счет исключения необходимости подбора датчиков момента гироскопа и регулировки усилителей управления.
Задачей, на решение которой направлены настоящие изобретения, является выравнивание скоростей управления платформой.
Поставленная задача достигается тем, что в способе управления индикаторной гироскопической платформой, заключающемся в подаче управляющего сигнала на датчики момента гироскопа, согласно изобретению токи, протекающие по обмоткам датчиков момента, регулируют посредством регулировочных резисторов, таким образом, что момент, создаваемый каждым датчиком момента, обеспечивает одинаковую скорость управления по каждому каналу в каждом направлении.
В индикаторную гироскопическую платформу, состоящую из гироскопа с ротором на сферической опоре и двумя каналами, содержащими дифференциальные датчики угла и два диаметрально расположенных датчика момента в каждом канале, входы управления платформы, датчики угла платформы и двигатели стабилизации платформы, причем дифференциальные датчики угла гироскопа соединены через усилители и стабилизации с соответствующими двигателями стабилизации платформы, согласно изобретению дополнительно введены регулировочные резисторы, параллельно подключенные к каждому датчику момента гироскопа.
К существенным отличиям предложенного способа относится то, что регулировка резисторами, подключенными параллельно к каждому датчику момента гироскопа, тока, протекающего через катушку датчика момента, обеспечивает выставку одинаковой скорости управления платформой в каждом направлении, что исключает необходимость подбора датчиков момента и обеспечивает полную взаимозаменяемость электромеханической и электронной частей платформы.
Скорость управления индикаторной платформой соответствует скорости управления гироскопом и определяется формулой:
где w - скорость управления гироскопом;
М - момент, создаваемый датчиком момента гироскопа;
Н - кинетический момент гироскопа.
Если, к примеру, в качестве датчика момента гироскопа используется электромагнит, работающий на постоянном токе, то формула для определения электромагнитного момента, создаваемого датчиком момента согласно [3], имеет следующий вид:
 ,
,
где F - намагничивающая сила;
G - магнитная проводимость;
Ψ - угол отклонения ротора от нейтрального положения.
Намагничивающая сила для любого электромагнита определяется формулой:
 ,
,
где I - ток в катушке датчика момента;
W - число витков в катушке.
Подставляя в (1), получим
 ,
,
где  - крутизна управления гироскопа или крутизна датчика момента гироскопа.
- крутизна управления гироскопа или крутизна датчика момента гироскопа.
Изменяя регулировочными резисторами ток, протекающий через обмотку датчика момента, можно добиться одинаковой скорости платформы во все направления.
К существенным отличиям устройства относится введение в него регулировочных резисторов, подключенных параллельно каждому датчику момента гироскопа, обеспечивающих возможность регулировки тока, протекающего через обмотку датчика момента гироскопа.
Предлагаемое изобретение иллюстрируется чертежом, где представлены гироскоп 1, дифференциальный датчик 2 угла первого канала гироскопа, дифференциальный датчик 3 угла второго канала гироскопа, первый датчик 4.1 момента, второй датчик 4.2 момента первого канала гироскопа, первый датчик 5.1 момента, второй датчик 5.2 момента второго канала гироскопа, входы 6, 7 усилителей 14, 15 управления платформы, диоды 16,17,18,19, датчики 8, 9 угла платформы, двигатели 10, 11 стабилизации платформы, усилители 12, 13 стабилизации платформы, оси управления X 20 и Y 21, регулировочные резисторы 22, 23, 24, 25.
Дифференциальный датчик 2 угла первого канала гироскопа 1 соединен через усилитель 12 стабилизации платформы с двигателем 10 стабилизации платформы. Дифференциальный датчик 3 угла второго канала гироскопа 1 соединен через усилитель 13 стабилизации платформы с двигателем 11 стабилизации платформы.
Вход 6 усилителя управления платформой соединен с усилителем 14 управления платформы, выход которого подключен в прямом направлении через диод 16 ко второму датчику 4.2 момента первого канала гироскопа и в обратном направлении через диод 17 к первому датчику 4.1 момента первого канала гироскопа, а выходы обоих датчиков 4.1 и 4.2 момента подключены к общему проводу. Вход 7 усилителя управления платформой соединен с усилителем 15 управления платформы, выход которого подключен в прямом направлении через диод 19 ко второму датчику 5.2 момента второго канала гироскопа и в обратном направлении через диод 18 - к первому датчику 5.1 момента второго канала гироскопа, а выходы обоих датчиков 5.1 и 5.2 момента подключены к общему проводу. Параллельно датчикам 4.1, 4.2, 5.1, 5.2 момента гироскопа подключены регулировочные резисторы 22, 23, 24, 25.
Способ управления индикаторной гироскопической платформой осуществляется следующим образом.
При подаче на вход 6 усилителя 14 управления, например положительного сигнала с выхода усилителя 14 управления, через диод 16 сигнал поступает на датчик 4.2 момента гироскопа, который создает момент, заставляющий прецессировать ротор гироскопа с угловой скоростью w4.2.
В дифференциальных датчиках 2 и 3 угла гироскопа появляются сигналы рассогласования, которые поступают на усилители 12, 13 стабилизации платформы. Сигналы с выходов 12, 13 усилителей стабилизации поступают на двигатели 10, 11 стабилизации платформы, которые приводят в движение платформу с угловой скоростью w4.2, отслеживая движение ротора гироскопа. Резистором 22 скорость управления гироскопа, а значит и платформы, регулируется до значения
w4-2=wРЕГ, где
w4-2 – скорость, создаваемая датчиком момента 4.2,
wРЕГ – скорость, отрегулированная резистором 22.
Аналогично, при подаче на вход 7 усилителя 15 управления положительного сигнала с выхода усилителя 15 управления через диод 19 сигнал поступает на датчик 5.2 момента гироскопа, который создает момент, заставляющий прецессировать ротор гироскопа с угловой скоростью w5-2.
В дифференциальных датчиках 2 и 3 угла гироскопа появляются сигналы рассогласования, которые поступают на усилители 12, 13 стабилизации платформы. Сигналы с выходов усилителей 12, 13 стабилизации поступают на двигатели 10, 11 стабилизации платформы, которые приводят в движение платформу с угловой скоростью w5-2, отслеживая движение ротора гироскопа. Резистором 23 скорость управления гироскопа, а значит и платформы, регулируется до значения
w5-2=wРЕГ, где
w5-2 – скорость, создаваемая датчиком момента 5.2,
wРЕГ – скорость, отрегулированная резистором 23.
При подаче на входы 6, 7 управления отрицательных сигналов управления резисторами 24 и 25 регулируются скорости управления, создаваемые датчиками 4.1 и 5.1 момента гироскопа
w4-1=wРЕГ и w4-2=wРЕГ, где
w4-1 и w4-2 – скорости, создаваемые датчиками момента 4.2 и 5.2 соответственно;
wРЕГ – скорость, отрегулированная резисторами 24 и 25.
Т.к. скорости управления гироскопа одинаковы, то и проекции этих скоростей на оси управления платформой будут одинаковы. В перекрестном канале проекции этих скоростей взаимно уничтожатся и влияния канала на канал при управлении не будет, что в конечном итоге приведет к повышению точности приведения платформы к заданному углу.
Предложенные изобретения использованы в гиростабилизированной платформе и показали хорошие результаты.
Источники информации:
1. Гироскопические системы, ч. II, под редакцией Д.С. Пельпора, М., Высшая школа, 1977 г., стр. 115, 116, 139, 140, рис. 3.6.
2. Патент РФ №2391630, G01C 19/44, 2006 г.
3. Гироскопические системы, ч. III, под общей редакцией Д.С. Пельпора, М., Высшая школа, 1972 г., стр. 406, 407, 412, 413, 414.
Изобретение относится к точному приборостроению, а именно к гироскопической технике, и может быть использовано в индикаторных гиростабилизаторах. Технический результат - выравнивание скоростей управления платформой. Для этого индикаторная гироскопическая платформа содержит электромеханическую часть, состоящую из гироскопа, дифференциальных датчиков угла первого и второго канала гироскопа, первого и второго датчиков момента первого канала гироскопа, первого и второго датчиков момента второго канала гироскопа, шунтирующих резисторов, датчиков угла платформы, двигателей стабилизации платформы, оси управления X и Y и электронную часть, состоящую из первого и второго усилителей управления платформой, первого и второго усилителей стабилизации платформы, диодов. Способ выравнивания скоростей управления платформой заключается в регулировке шунтирующими резисторами тока, протекающего в обмотках датчиков момента гироскопа, таким образом, чтобы моменты, создаваемые каждым датчиком момента гироскопа, и как следствие скорости управления платформой были одинаковы. 2 н.п. ф-лы, 1 ил.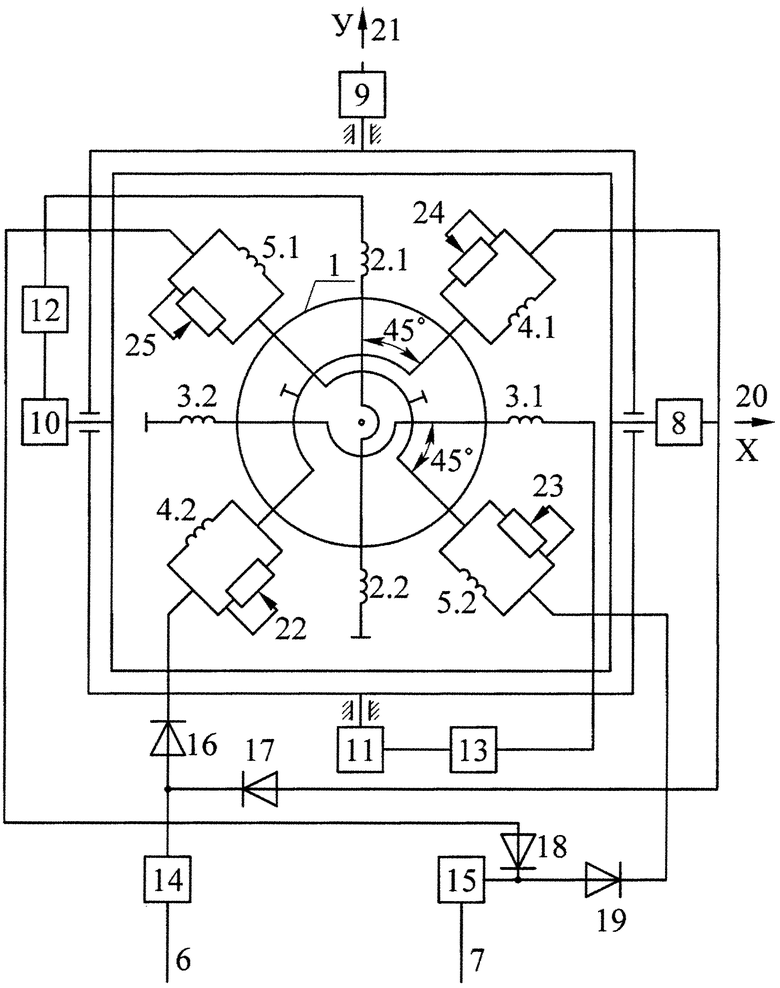
1. Способ управления индикаторной гироскопической платформой, заключающийся в подаче управляющего сигнала на датчики момента гироскопа, отличающийся тем, что токи, протекающие по обмоткам датчиков момента, регулируют посредством регулировочных резисторов, таким образом, что момент, создаваемый каждым датчиком момента, обеспечивает одинаковую скорость управления платформы по каждому каналу в каждом направлении.
2. Устройство для осуществления способа управления платформой, состоящее из гироскопа с ротором на сферической опоре и двумя каналами, содержащими дифференциальные датчики угла и два диаметрально расположенных датчика момента в каждом канале, входы управления платформы, датчики угла платформы и двигатели стабилизации платформы, причем дифференциальные датчики угла гироскопа соединены через усилители стабилизации с соответствующими двигателями стабилизации платформы, отличающееся тем, что в него введены регулировочные резисторы, параллельно подключенные к каждому датчику момента гироскопа.
| СПОСОБ УПРАВЛЕНИЯ ИНДИКАТОРНОЙ ГИРОСКОПИЧЕСКОЙ ПЛАТФОРМОЙ И ИНДИКАТОРНАЯ ГИРОСКОПИЧЕСКАЯ ПЛАТФОРМА | 2008 |
|
RU2391630C2 |
| СПОСОБ КОРРЕКЦИИ ДРЕЙФА ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572501C1 |
| Индукционный электродвигатель | 1988 |
|
SU1617545A1 |
| Бесекерский В.А., Фабрикант Е.А | |||
| Динамический синтез систем гироскопической стабилизации | |||
| Л., Судостроение, 1968 г., стр.283, 284, 171, 172, рис.6.1 | |||
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334205C1 |
| КОВАЛЕВ М.П | |||
| и др | |||
| Динамическое уравновешивание роторов гироскопических систем | |||
| - М.: Оборонгиз, 1962, с.188-195. | |||

