Изобретение относится к способам виброизоляции и может быть использовано при оборудовании рабочих мест операторов транспортных средств и самоходных технологических машин (ТССТМ) различного назначения. Изобретение может быть использовано как при совершенствовании ТССТМ известных типов, так и создании перспективных ТССТМ.
Известен способ виброизоляции [Krejcir О., Pneumaticka Vibroizolace, Doctorska disertacna prace, Liberec, Czech Republic, 1986], заключающийся в смягчении действия бесштокового пневматического упругого элемента подвески сиденья за счет поперечного сдвига и возбуждения локального неустойчивого движения упругого элемента, а затем в формировании и активации сигнала позиционного управления виброизолирующей системой.
Недостаток способа состоит в том, что диапазон неустойчивого движения упругого элемента имеет величину, много меньшую рабочего хода подвески. Кроме того, связанность локального неустойчивого движения и глобального движения (в направлении позиционного управления) не позволяет обеспечить устойчивость движения системы.
Известен также способ виброизоляции [Патент РФ 2115570, МПК B60N 2/50, 1998], заключающийся в смягчении действия упругого элемента подвески сиденья путем закритического деформирования и возбуждения неустойчивого движения дополнительного упругого элемента в процессе колебаний виброизолирующей системы. Способ обеспечивает устойчивость и высокое качество виброизоляции при установившихся режимах движения системы, включая диапазон инфрачастот, начиная с f≥1 Гц.
Недостатком способа является невозможность обеспечения устойчивости движения виброизолирующей системы при больших относительных перемещениях на квазистатических режимах, т.е. весьма медленных колебаниях в полосе инфрачастот 0<f<1 Гц, а также на переходных режимах с относительными скоростями порядка υотн≥0,04…0,05 м/с-1 выхода подвески на ограничители хода, что может вызывать удары об ограничители хода.
Наиболее близким по технической сущности и достигаемому результату является способ виброизоляции [Алабужев П.М. и др. Виброзащитные системы с квазинулевой жесткостью. - Л.: Машиностроение, 1986], заключающийся в смягчении действия пневматического упругого элемента подвески сиденья путем деформирования и возбуждения неустойчивого движения дополнительного упругого элемента в процессе колебаний виброизолирующей системы, а затем в формировании и активации сигнала позиционного управления системой. Действие дополнительного упругого элемента позволяет обеспечить смягчение пневматического упругого элемента подвески при малых перемещениях, а работа системы управления - устойчивое движение виброизолирующей системы на данных перемещениях.
Однако при колебаниях в диапазоне инфрачастот с амплитудами, сопоставимыми с величиной рабочего хода подвески, система неустойчива и теряет качество виброизоляции. Особенно способ неэффективен в полосе инфрачастот 0<f≤5 Гц. Это ясно, например, из решения задачи об установившемся движении системы:

где f0 - основная частота системы; ng ∈(0; 1] - коэффициент гравитации; k - коэффициент жесткости подвески; m - масса человека-оператора; km=1…1,4 - коэффициент, учитывающий способ размещения человека на сидении; g - ускорение свободного падения; z - ход подвески. А при скоростях относительного движения порядка υотн≥0,04…0,05 м/с-1 вибрации усиливаются, происходят удары подвески об ограничители хода. Причина в том, что интервал неустойчивого движения дополнительного упругого элемента и, соответственно, смягчения действия пневматического упругого элемента мал в сравнении с величиной рабочего хода подвески. Расширение этого интервала требует значительного увеличения размеров рабочего пространства подвески и системы в целом. Это, в свою очередь, вступает в неразрешимое противоречие с одним из основных требований к компоновке и организации рабочего места человека-оператора в современных и перспективных ТССТМ. А именно, требование минимизации размеров рабочего пространства, с учетом антропометрии человека, при одновременном увеличении количества опций на единицу объема, способствующих повышению эффективности системы. Все это делает данный способ неэффективным в ТССТМ.
В целом отмеченные недостатки известных способов не позволяют решить одну из ключевых задач транспортного машиностроения и эксплуатации ТССТМ: обеспечение качественной виброизоляции, особенно в диапазоне инфрачастот, наиболее вредных и опасных для здоровья и эффективной работы человека-оператора.
Известна подвеска сиденья [Патент Японии 2855479, 1990], содержащая основание, механизм преобразования движения (направляющий механизм), пневматический упругий элемент, а также механизм для формирования и активации сигнала позиционного управления, содержащий блок подготовки воздуха и пневмораспределитель с регулируемыми параметрами. Данная подвеска обеспечивает высокие показатели качества виброизоляции в диапазоне частот f>10…12 Гц.
Недостатком подвески является неустойчивость и нечувствительность к управлению в полосе инфрачастот 0<f<1 Гц. Более того, на инфрачастотах, 1≤f≤5 Гц, которые совпадают с рядом основных частот тела человека, подвеска способствует возбуждению резонансных колебаний виброизолирующей системы. Это, в свою очередь, вызывает необходимость применения дополнительных механизмов в виде неадекватно вязких гидравлических демпферов для ослабления резонансных колебаний. Таким образом, упускается цель проектирования и применения подвесок: защита человека-оператора от вибраций, прежде всего, в диапазоне наиболее вредных и опасных для него инфрачастот.
Известна также подвеска сиденья [Алабужев П.М. и др. Виброзащитные системы с квазинулевой жесткостью. - Л.: Машиностроение, 1986] для реализации известного способа виброизоляции, содержащая основание, механизм преобразования движения, пневматический упругий элемент, дополнительный упругий элемент, установленный с возможностью неустойчивого движения, а также механизм формирования и активации сигнала позиционного управления, содержащий блок подготовки воздуха и пневмораспределитель с регулируемыми параметрами. Эффект достигается за счет выбора геометрии сопряженных (рабочих) поверхностей жестких звеньев, образующих кинематическую цепь силового замыкания дополнительного упругого элемента и подвески, а также определенной последовательности нагружения и взаимного мгновенного положения обоих упругих элементов в относительном движении жестких звеньев.
Недостатком подвески является ее высокая чувствительность к незначительным ошибкам в геометрии сопряженных поверхностей и в настройке, а также изменениям относительного положения жестких звеньев, образующих кинематическую цепь силового замыкания дополнительного упругого элемента. При активном управлении подвеска эффективна, но при вибрациях с малыми амплитудами, много меньшими величины рабочего хода. Она, как принято говорить, эффективна в окрестностях «особых» точек перехода дополнительного упругого элемента из устойчивого положения в неустойчивое. При удалении от «особой» точки эффект смягчения уменьшается. И, начиная с определенного положения, дополнительный упругий элемент ужесточает действие подвески и, соответственно, ухудшает качество виброизоляции. При этом движение системы становится неустойчивым, и подвеска стремится на ограничители хода. Все это делает данную подвеску неэффективной в ТССТМ. Расширение эффективного интервала неустойчивого движения дополнительного упругого элемента до уровня, заданного величиной хода подвески, требует значительного увеличения рабочего пространства. Но протяженность интервала зависит от геометрии и абсолютных размеров жестких звеньев. Это, в свою очередь, противоречит основным требованиям организации рабочего места человека-оператора ТССТМ, упомянутым выше.
Из анализа уровня техники в данной области следует, что задачей изобретения является повышение качества виброизоляции человека-оператора ТССТМ, особенно в полосах инфрачастот, наиболее вредных и опасных для его здоровья и эффективной работы, включая квазистатические режимы и переходные режимы движения виброизолирующей системы.
Решение задачи достигается тем, что в известном способе, согласно которому смягчают действие упругого элемента подвески сиденья путем закритического деформирования и возбуждения неустойчивого движения дополнительного упругого элемента, формируют и активируют сигнал позиционного управления виброизолирующей системой, регулируют протяженность интервала неустойчивого движения дополнительного упругого элемента и жесткость на данном интервале в пределах рабочего хода подвески, и формируют, по меньшей мере, один дополнительный сигнал позиционного управления, который активируют на квазистатических режимах движения системы и переходных режимах на относительных скоростях выхода подвески на ограничители хода.
Эффект также достигается тем, что известная подвеска сиденья, содержащая основание, механизм преобразования движения, кинематическая цепь которого включает входное и выходное звенья, пневматический упругий элемент, дополнительный упругий элемент, установленный с возможностью неустойчивого движения при закритическом деформировании, а также механизм формирования и активации сигнала позиционного управления, содержащий блок подготовки воздуха и пневмораспределитель, снабжена дополнительной кинематической цепью геометрического замыкания подвески и дополнительного упругого элемента, а также, по меньшей мере, одним механизмом формирования и активации дополнительного сигнала позиционного управления, при этом отношение эффективных значений площадей проходных сечений дросселей на входе и выходе пневмораспределителей механизмов формирования и активации сигналов позиционного управления составляет значения порядка 20…30. Причем дополнительная кинематическая цепь, связывающая основание и входное звено подвески, содержит не более двух подвижных соединений, одно из которых обеспечивает точечный или линейчатый контакт звеньев соединения и выполнено, например, в виде конической зубчатой передачи.
Существо и эффективность заявляемого способа виброизоляции человека-оператора ТССТМ, а также подвеска сиденья для реализации способа поясняются нижеследующими иллюстрациями и описанием.
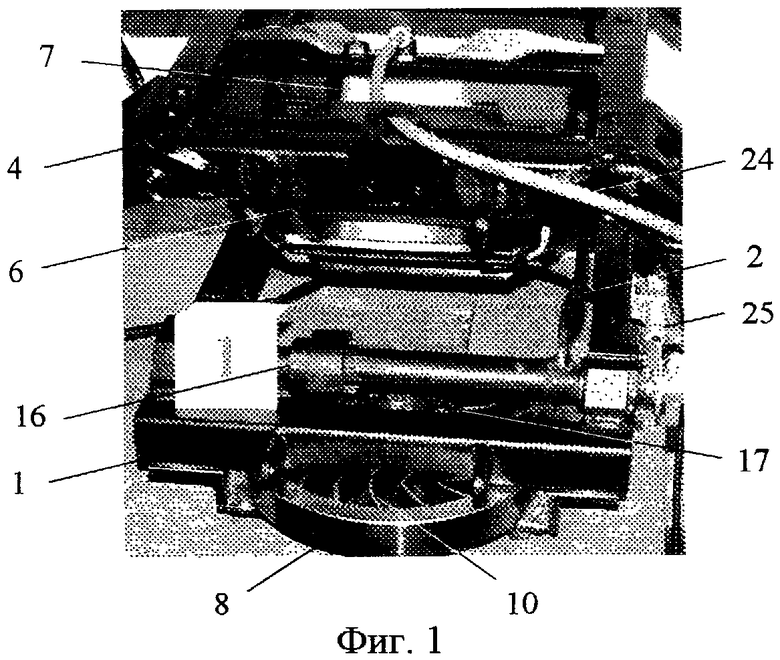
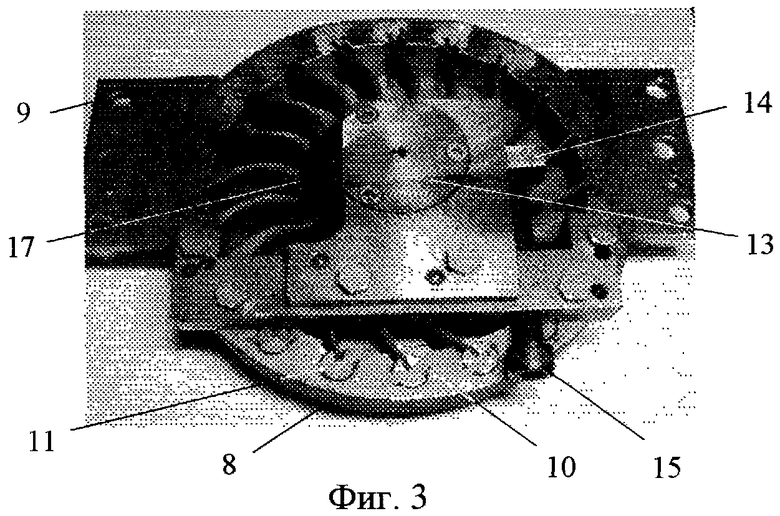
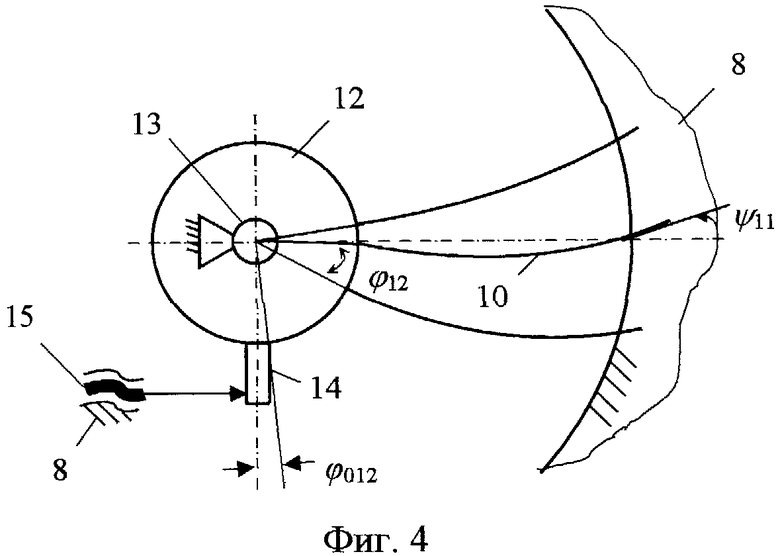
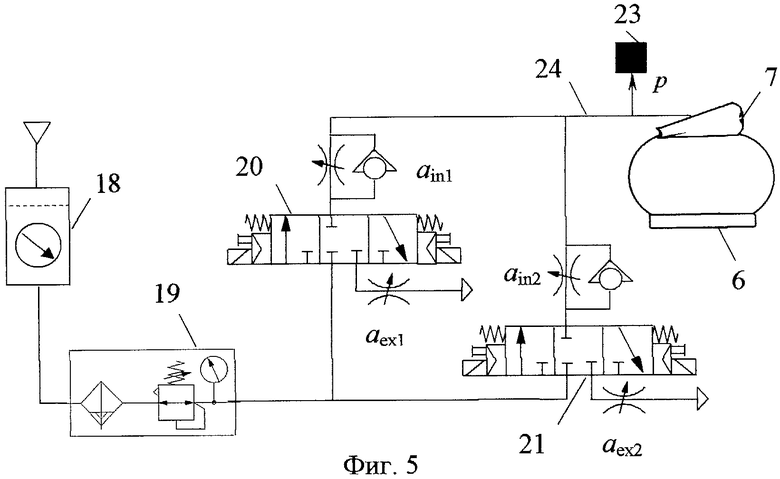
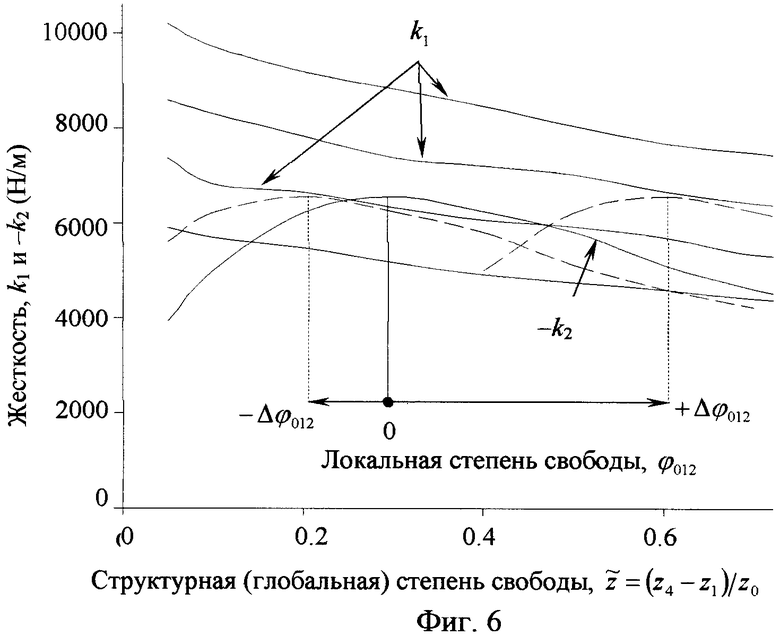
На фиг.1 показан общий вид подвески; фиг.2 - кинематическая схема подвески; фиг.3 - общий вид дополнительного упругого элемента с элементами дополнительной кинематической цепи геометрического замыкания; фиг.4 - кинематическая схема и схема регулирования протяженности интервала неустойчивого движения дополнительного упругого элемента; фиг.5 - схема двухканальной пневматической системы управления; фиг.6 - характеристики и схема регулирования жесткости пневматического и дополнительного упругих элементов; фиг.7 - характеристики процесса позиционного управления до начала движения виброизолирующей системы; фиг.8 - характеристики процесса и эффективности управления виброизолирующей системой (математическое моделирование); фиг.9 - характеристика эффективности подвески для реализации способа (выходной сигнал 3) в сравнении с характеристиками подвески-прототипа при слабом (выходной сигнал 2) и сильном (выходной сигнал 1) вязком демпфировании при установившемся движении виброизолирующей системы в диапазоне инфрачастот, включая квазистатические режимы (стендовые испытания); фиг.10 - характеристики эффективности подвески-прототипа (фиг.10а) и подвески для реализации способа (фиг.10б) на переходных режимах движения виброизолирующей системы (стендовые испытания).
Подвеска сиденья (фиг.1 - фиг.4) для реализации способа содержит основание 1; механизм преобразования движения (направляющий механизм), кинематическая цепь которого состоит из входного звена (жестко связанных между собой вала и рычага) 2, промежуточных звеньев (рычагов) 3 и выходного звена (жесткой рамы) 4 для установки посадочного места сиденья; ограничители 5 хода; пневматический упругий элемент, установленный между основанием 1 и звеном 4 и состоящий из замкнутой резинокордной оболочки 6 и опорных обтекателей 7; дополнительный упругий элемент, связанный с основанием 1 и входным звеном 2 механизма преобразования движения подвески дополнительной кинематической цепью геометрического замыкания и содержащий корпус 8 с пилонами 9 для крепления к основанию 1 и набор пластинчатых пружин 10, одни концы которых установлены во вставках 11, размещенных в корпусе 8 с возможностью поворота на угол ψ11 заданной величины при сборке корпуса с последующей жесткой фиксацией угла, а противоположные - на центральной втулке 12, причем пластинчатые пружины 10 упруго деформированы в закритической области в радиальном направлении с возможностью неустойчивого движения в осевом направлении при возвратно-вращательном движении втулки 12 относительно корпуса 8 в заданном диапазоне изменения угловой координаты φ12; при этом дополнительная кинематическая цепь содержит подвижное соединение в виде подшипниковой опоры 13 для втулки 12, с которой жестко связан рычаг 14, поджатый винтом 15 для регулирования (и коррекции) начального углового положения φ012 втулки 12 на заданную величину ±Δφ012, а также подвижное соединение, выполненное, например, в виде конической зубчатой передачи, колесо 16 которой установлено на входном звене 2, а колесо 17 - на втулке 12. Наряду с этим подвеска снабжена (фиг.5) многоканальной системой управления, содержащей устройство 18 отбора воздуха из пневматической сети ТССТМ, блок подготовки воздуха 19, механизм формирования и активации сигнала адаптивного позиционного управления, содержащий пневмораспределитель 20 с электромагнитным исполнительным устройством, и, по меньшей мере, один механизм формирования и активации дополнительного - стабилизирующего - сигнала позиционного управления, содержащий пневмораспределитель 21 с электромагнитным исполнительным устройством, при этом система управления содержит датчик 22 угловых перемещений звеньев 2 и 3 в их относительном движении, датчик 23 воздушного давления на входе 24 в оболочку 6 пневматического упругого элемента и контроллер 25, состоящий из программируемого микропроцессора с источником питания и содержащий алгоритм управления, причем отношение эффективных значений площадей проходных сечений дросселей на входе и выходе пневмораспределителей 21 и 20 составляет значения порядка:

Способ осуществляют с помощью подвески сиденья следующим образом. Дополнительный упругий элемент присоединяют к подвеске с помощью дополнительной кинематической цепи геометрического замыкания, для чего зубчатое колесо 16 устанавливают на валу входного звена 2, а зубчатое колесо 17 - на втулке 12, после этого колеса 16 и 17 вводят в зацепление при заданном начальном значении угла φ2 наклона рычага входного звена 2, а пилоны 9 корпуса 8 жестко крепят к основанию 1. Затем основание 1 подвески, собранной вместе с посадочным местом сиденья (не показано), жестко крепят, например, к силовому набору пола кабины ТССТМ. После этого пневмораспределители 20 и 21 присоединяют, с одной стороны, к блоку подготовки воздуха 19 и затем к устройству 18 отбора воздуха из пневматической сети ТССТМ, а с другой стороны - к входу 24 пневматического упругого элемента. Электрические цепи управления пневмораспределителями 20 и 21, а также датчиков 22 и 23 присоединяют к контроллеру 25, а тот, в свою очередь, - к бортовой сети ТССТМ постоянного тока с соответствующими параметрами. Далее подают воздух в пневматический упругий элемент, увеличивая давление р в его рабочей камере до обеспечения статического равновесия виброизолирующей системы в соответствии с массой человека-оператора, разместившегося на сидении, и заданной исходной позицией. Для смягчения действия пневматического упругого элемента регулируют протяженность интервала неустойчивого движения и жесткости пластинчатых пружин 9 дополнительного упругого элемента в пределах рабочего хода подвески с помощью винта 15, корректируя начальное угловое положение φ012 втулки 12 на величину в пределах Δφ012<±(6…7) градусов и выбирая, таким образом, наиболее рациональное соотношение жесткостей пневматического и дополнительного упругих элементов (фиг.6) согласно условию (1). Далее смягчение действия пневматического упругого элемента с помощью дополнительного упругого элемента осуществляют в режиме активного управления согласно одному из следующих критериев:

где k(z) - жесткость подвески в z -направлении позиционного управления; k1(z)-=(Adp/ds±pdA/ds) - жесткость пневматического упругого элемента, А - эффективная площадь оболочки 6;  - жесткость пружин 10, которая имеет отрицательные значения при упругом закритическом деформировании при возвратно-вращательном движении втулки 12 в пределах рабочего хода подвески, здесь
- жесткость пружин 10, которая имеет отрицательные значения при упругом закритическом деформировании при возвратно-вращательном движении втулки 12 в пределах рабочего хода подвески, здесь  - безразмерная жесткость пружин 10 на изгиб; µk и µl, - масштабные коэффициенты соответственно жесткости и преобразования вращательного движения входного звена 2 в поступательное движение выходного звена 4; i2=φ16/φ17 - передаточное число конической зубчатой передачи;
- безразмерная жесткость пружин 10 на изгиб; µk и µl, - масштабные коэффициенты соответственно жесткости и преобразования вращательного движения входного звена 2 в поступательное движение выходного звена 4; i2=φ16/φ17 - передаточное число конической зубчатой передачи;  - передаточная функция механизма преобразования движения, здесь kn - коэффициент нелинейности, зависящий от компоновки и взаимного мгновенного положения осей z-направления и s-направления поступательного движения оболочки 6 относительно опорных обтекателей 7, β - взаимное угловое отклонение осей z и s.
- передаточная функция механизма преобразования движения, здесь kn - коэффициент нелинейности, зависящий от компоновки и взаимного мгновенного положения осей z-направления и s-направления поступательного движения оболочки 6 относительно опорных обтекателей 7, β - взаимное угловое отклонение осей z и s.
Формирование и активация сигналов (команд) позиционного управления подвеской реализуется по алгоритму, задающему определенную последовательность состояний пневмораспределителей 20 и 21. Система хранит информацию об исходной позиции во флеш-памяти микропроцессора. Все последующие команды управления обеспечивают поддержание мгновенной позиции относительно исходной на различных режимах движения. Последовательность команд позиционного управления следующая.
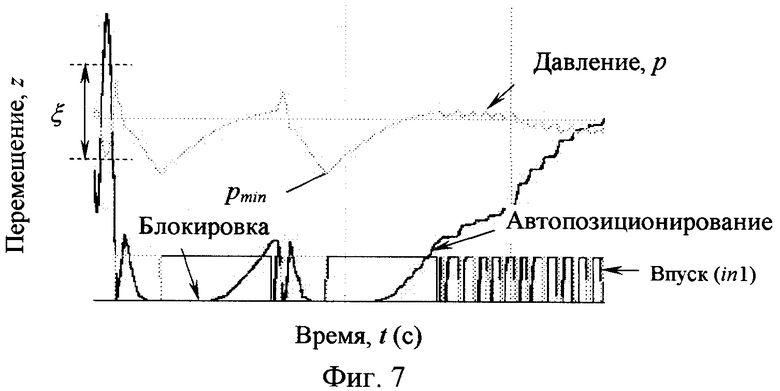
1. Управление до начала движения ТССТМ (фиг.7). Если человек-оператор размещается на сидении, то система управления возвращает звено 4 в исходную позицию. Если человек-оператор покидает сиденье, то система инициирует сброс давления воздуха до некоторой величины pmin до тех пор, пока соотношение жесткостей пневматического и дополнительного упругих элементов не достигнет некоторой величины |-k2|>k1 согласно критерию (3в). При этом вес «свободного» (без человека) сиденья становится больше, чем т.н. верхняя критическая нагрузка на пружины 10. В результате сиденье надежно блокируется на нижнем упоре ограничителя 5 хода. Такое управление, с автоматическим восстановлением исходной позиции (автопозиционированием) после возвращения человека-оператора на рабочее место, более удобно в сравнении с подвеской-прототипом. Преимущество заключается в том, что не надо учитывать особенности антропометрических характеристик конкретного (сменного) человека-оператора, а также компоновки его рабочего места в кабине ТССТМ. Кроме того, это дает возможность надежной блокировки подвески сиденья в аварийной ситуации.
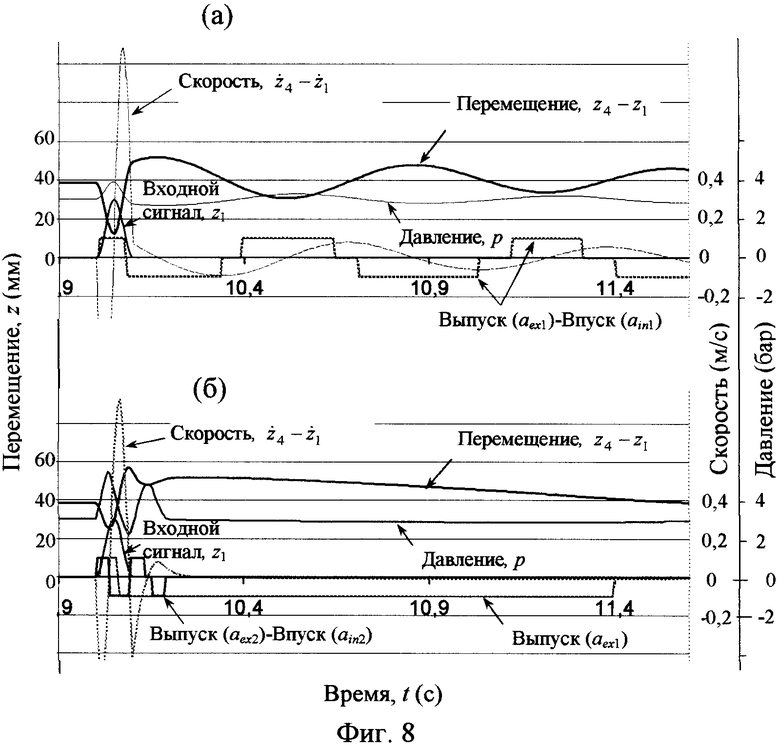
2. Управление при вибрациях и импульсных нагрузках. При движении ТССТМ работа алгоритма управления основывается на оценке отклонения мгновенной позиции z4(t)-z1(t) от исходной и/или скорости  относительного движения основания 1 и звена 4 с последующей коррекцией мгновенной позиции. Фиг.8 иллюстрирует процесс работы системы управления. При моделировании процессов управления амплитуда перемещений источника внешнего возмущения виброизолирующей системы варьировалась до z1=100 мм. Это существенно больше величины рабочего хода подвески-прототипа, который обычно составляет z0=65…70 мм.
относительного движения основания 1 и звена 4 с последующей коррекцией мгновенной позиции. Фиг.8 иллюстрирует процесс работы системы управления. При моделировании процессов управления амплитуда перемещений источника внешнего возмущения виброизолирующей системы варьировалась до z1=100 мм. Это существенно больше величины рабочего хода подвески-прототипа, который обычно составляет z0=65…70 мм.
2.1. Адаптивное управление. Оно осуществляется при установившихся режимах движения виброизолирующей системы путем ограничения амплитуды перемещения подвески относительно исходной позиции в пределах заданного «коридора» ξj. Система управления обеспечивает поддержание мгновенной позиции с помощью обратной связи с датчиком 22 по относительным перемещению, z4(t)-z1(t), и скорости,  , основания 1 и выходного звена 4. С помощью обратной связи по давлению с датчиком 23 система контролирует давление р воздуха на входе в пневматический упругий элемент. Это дает возможность регулирования и оптимизации жесткости подвески на интервале неустойчивого движения дополнительного упругого элемента согласно критериям (3а-3б). Если перемещение - в заданных пределах, то пневмораспределители 20 и 21 - в «нейтральной» позиции. В противном случае система управления активирует работу механизма формирования и активации сигнала адаптивного управления, устраняя дрейф подвески относительно «коридора». Его пневмораспределитель 20 работает в режиме впуска, a
inl≠0, a
exl=0 или выпуска, a
inl=0, a
exl≠0, воздуха в зависимости от величины и знака z4(t)-z1(t). Здесь a
inl, a
exl - значения площадей проходных сечений дросселей на входе и выходе пневмораспределителя 20, определенные в процессе математического моделирования и стендовых испытаний.
, основания 1 и выходного звена 4. С помощью обратной связи по давлению с датчиком 23 система контролирует давление р воздуха на входе в пневматический упругий элемент. Это дает возможность регулирования и оптимизации жесткости подвески на интервале неустойчивого движения дополнительного упругого элемента согласно критериям (3а-3б). Если перемещение - в заданных пределах, то пневмораспределители 20 и 21 - в «нейтральной» позиции. В противном случае система управления активирует работу механизма формирования и активации сигнала адаптивного управления, устраняя дрейф подвески относительно «коридора». Его пневмораспределитель 20 работает в режиме впуска, a
inl≠0, a
exl=0 или выпуска, a
inl=0, a
exl≠0, воздуха в зависимости от величины и знака z4(t)-z1(t). Здесь a
inl, a
exl - значения площадей проходных сечений дросселей на входе и выходе пневмораспределителя 20, определенные в процессе математического моделирования и стендовых испытаний.
2.2. Стабилизирующее управление. Оно осуществляется на квазистатических режимах при установившемся движении и переходных режимах движения виброизолирующей системы. Результаты моделирования показывают, что адаптивное управление недостаточно эффективно на таких режимах. В примере на фиг.8а амплитуда внешнего возмущения равна z1=30 мм. Колебания не затухают, если применить систему управления с пневмораспределителем 20 с проходными сечениями площадью a
in1 и a
exl, как в подвеске-прототипе. Поэтому в подвеске-прототипе, для предотвращения ударов об ограничители хода, используют внешний гидравлический демпфер. Однако это не обеспечивает виброизоляции, а лишь ослабляет резонансные пики, как это следует из фиг.9 (выходные сигналы 1 и 2). Вместе с тем формирование и активация дополнительного - стабилизирующего - сигнала управления позволяет избежать ударов об ограничители 5 хода и без использования внешнего гидравлического демпфера. Механизм формирования и активации дополнительного сигнала с пневмораспределителем 21 работает по алгоритму анализа изменений относительной скорости  и контроля условия
и контроля условия 
 . Здесь
. Здесь  - допустимая величина скорости, например υотн≈0,04…0,05 м/с-1. Если
- допустимая величина скорости, например υотн≈0,04…0,05 м/с-1. Если  , то система управления, независимо от величины относительного перемещения, z4(t)-z1(t), активирует работу механизма. Его пневмораспределитель 21 работает в режиме попеременного форсированного впуска, a
in2≠0, a
ex2=0, воздуха в рабочую камеру или выпуска, a
in2=0, a
ex2≠0, в зависимости от величины и знака
, то система управления, независимо от величины относительного перемещения, z4(t)-z1(t), активирует работу механизма. Его пневмораспределитель 21 работает в режиме попеременного форсированного впуска, a
in2≠0, a
ex2=0, воздуха в рабочую камеру или выпуска, a
in2=0, a
ex2≠0, в зависимости от величины и знака  . Здесь a
in2≈(20…30)·a
in1 и a
ex2≈(20…30)·a
ex1 - значения площадей проходных сечений дросселей на входе и выходе пневмораспределителя 21, полученные по результатам решения оптимизационной задачи и стендовых испытаний. При этом механизм с пневмораспределителем 20 корректирует мгновенную позицию, минимизируя ошибку из-за форсированной подачи воздуха в пневматический упругий элемент через пневмораспределитель 21. Фиг.8б показывает, что такое управление, даже в дискретном режиме, стабилизирует подвеску практически мгновенно.
. Здесь a
in2≈(20…30)·a
in1 и a
ex2≈(20…30)·a
ex1 - значения площадей проходных сечений дросселей на входе и выходе пневмораспределителя 21, полученные по результатам решения оптимизационной задачи и стендовых испытаний. При этом механизм с пневмораспределителем 20 корректирует мгновенную позицию, минимизируя ошибку из-за форсированной подачи воздуха в пневматический упругий элемент через пневмораспределитель 21. Фиг.8б показывает, что такое управление, даже в дискретном режиме, стабилизирует подвеску практически мгновенно.
Результаты математического моделирования проверены в процессе испытаний подвески на электрогидравлическом вибраторе путем возбуждения периодических вибраций и импульсных нагрузок. Выполнены также сравнительные испытания образцов подвески-прототипа и подвески для реализации способа при вибрациях и импульсных воздействиях. В частности:
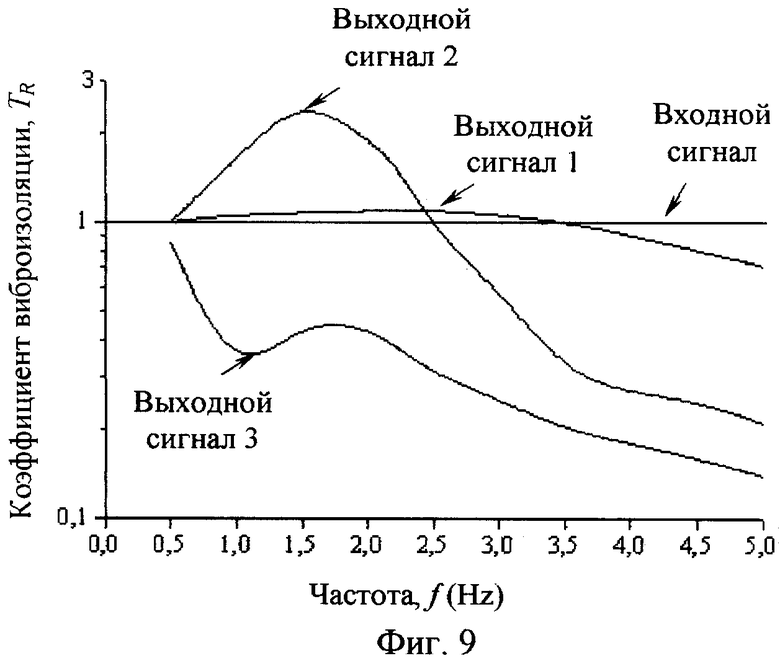
1) Фиг.9 показывает виброизоляцию при установившемся движении системы на инфрачастотах f=0,25…5 Гц с амплитудой ускорения (входной сигнал) Lin(а)(f)≤70 дБ с помощью подвески для реализации способа (выходной сигнал 3) в сравнении с качеством подвески-прототипа, оснащенной, соответственно, сильным (выходной сигнал 1) и слабым (выходной сигнал 2) гидравлическим демпфером. Как видно, подвеска для реализации способа не имеет резонансов во всем исследуемом диапазоне инфрачастот, а ее качество виброизоляции превосходит на 500% и более качество подвески-прототипа, т.е. сравнительный коэффициент виброизоляции TR(f)>5.
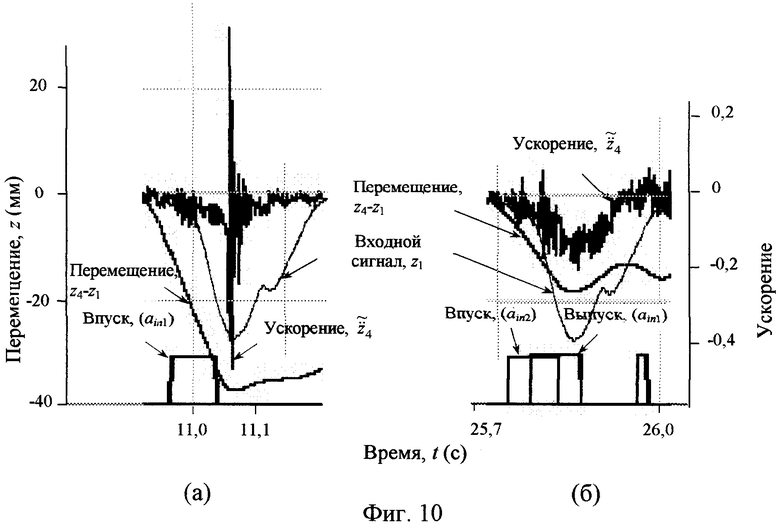
2) Фиг.10 показывает движение системы на переходных режимах при импульсных воздействиях, одиночных или повторяющихся. Амплитуда входного сигнала составляет z1≈30 мм, длина фронта - 0,1 сек. Здесь форма импульса входного сигнала отражает реальный отклик основания подвески, например, при наезде переднего или заднего колеса ТССТМ на препятствие с учетом сглаживающей способности шины. При испытании подвески-прототипа (фиг.10а) такие воздействия вызывают удары об ограничители хода, а амплитуда ускорений выходного сигнала растет, по меньшей мере, на 40%, т.е. коэффициент усиления FD>1,4. При этом подвеска для реализации способа обеспечивает безударное движение и уменьшение виброперегрузок. В данном примере (фиг.10б) FD<0,6 и TR≥2,3.
Таким образом, изобретение позволяет решить одну из ключевых задач транспортного машиностроения и эксплуатации ТССТМ: обеспечение качественной виброизоляции человека-оператора, особенно в полосах инфрачастот, наиболее вредных и опасных для его здоровья и эффективной работы. Решение задачи достигается за счет:
1) Смягчения действия пневматического упругого элемента в пределах рабочего хода подвески путем выполнения условия (3а): k(z)→+min - с помощью дополнительного упругого элемента с регулируемым диапазоном неустойчивого движения и механизма формирования и активации сигнала адаптивного позиционного управления. Практическое применение способа показало возможность смягчения подвески с k1=4200…10000 Н/м до k=85…400 Н/м и менее.
2) Обеспечения качественной виброизоляции, включая квазистатические режимы движения системы, т.е. при медленных вибрациях на инфрачастотах порядка 0<f<1 Гц, и переходные режимы со скоростями относительного движения порядка υотн≥0,04…0,05 м/с-1, с помощью механизма формирования и активации дополнительного (стабилизирующего) сигнала позиционного управления. Причем для этого не требуется гидравлический демпфер, как в подвеске-прототипе, который практически исключает саму возможность качественной виброизоляции на инфрачастотах.
3) Формирования кинематической цепи геометрического замыкания подвески и дополнительного упругого элемента, что, в свою очередь: а) исключает влияние дополнительного упругого элемента на позиционное управление, т.к. дополнительная кинематическая цепь связывает основание и входное звено; б) обеспечивает рациональные схему и компактность размещения дополнительного упругого элемента в рабочем пространстве подвески.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИБРОИЗОЛЯЦИИ ПИЛОТА ВЕРТОЛЕТА И ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2015 |
|
RU2597042C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ПИЛОТА ВЕРТОЛЕТА И ПОДВЕСКА КРЕСЛА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2024 |
|
RU2837435C1 |
| СПОСОБ ВТОРИЧНОГО ПОДРЕССОРИВАНИЯ ТЕЛЕЖКИ ВАГОНА ВЫСОКОСКОРОСТНОГО РЕЛЬСОВОГО ТРАНСПОРТА | 2015 |
|
RU2597428C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ И ВИБРОИЗОЛИРУЮЩИЙ МЕХАНИЗМ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2019 |
|
RU2753061C2 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И СИДЕНЬЕ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2115570C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОИЗОЛИРУЮЩЕГО УСТРОЙСТВА КОМПАКТНОГО СИДЕНЬЯ ДЛЯ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И ВИБРОИЗОЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2001 |
|
RU2214335C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2440523C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ПОДВЕСКИ КОМПАКТНОГО СИДЕНЬЯ | 2001 |
|
RU2216461C2 |
| СПОСОБ НАСТРОЙКИ РЕЖИМОВ РАБОТЫ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2595733C2 |
Изобретения относятся к обеспечению виброизоляции человека-оператора транспортного средства. Способ реализации заключается в том, что смягчают действие упругого элемента подвески сиденья путем закритического деформирования и возбуждения неустойчивого движения дополнительного упругого элемента. Затем формируют и активируют сигнал позиционного управления виброизолирующей системой. Протяженность интервала неустойчивого движения дополнительного упругого элемента и жесткость на данном интервале регулируют в пределах рабочего хода подвески. При этом формируют один дополнительный сигнал позиционного управления, который активируют на квазистатических режимах и переходных режимах движения системы с относительными скоростями выхода подвески на ограничители хода. Подвеска сиденья содержит основание, механизм преобразования движения, пневматический упругий элемент, дополнительный упругий элемент, а также механизм формирования и активации сигнала позиционного управления, содержащий блок подготовки воздуха и пневмораспределитель. Кинематическая цепь механизма преобразования движения включает входное и выходное звенья. Дополнительный упругий элемент установлен с возможностью неустойчивого движения при закритическом деформировании. При этом подвеска снабжена дополнительной кинематической цепью геометрического замыкания подвески и дополнительного упругого элемента, а также одним механизмом формирования и активации дополнительного сигнала позиционного управления. Отношение параметров механизмов формирования и активации сигналов позиционного управления имеет значения порядка:  где αin1, αex1 и αin2, αех2 - эффективные значения площадей проходных сечений дросселей на входе и выходе пневмораспределителей. Достигается повышение качества виброизоляции человека-оператора транспортного средства. 2 н. и 1 з.п. ф-лы, 10 ил.
где αin1, αex1 и αin2, αех2 - эффективные значения площадей проходных сечений дросселей на входе и выходе пневмораспределителей. Достигается повышение качества виброизоляции человека-оператора транспортного средства. 2 н. и 1 з.п. ф-лы, 10 ил.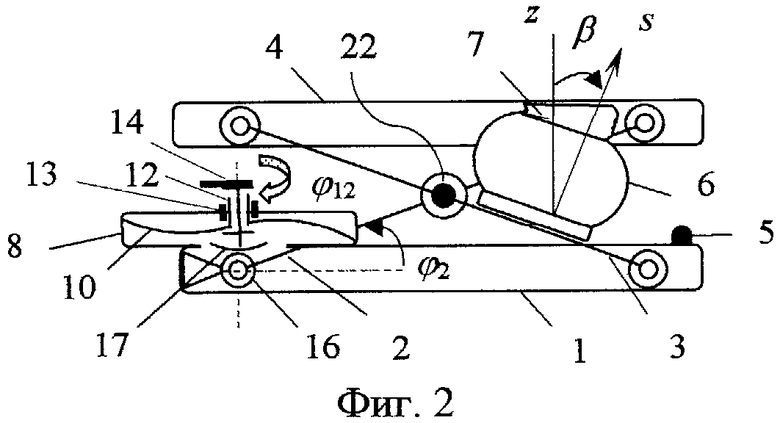
1. Способ виброизоляции человека-оператора транспортного средства и самоходной технологической машины, согласно которому смягчают действие упругого элемента подвески сиденья путем закритического деформирования и возбуждения неустойчивого движения дополнительного упругого элемента, а затем формируют и активируют сигнал позиционного управления виброизолирующей системой, отличающийся тем, что регулируют протяженность интервала неустойчивого движения дополнительного упругого элемента и жесткость на данном интервале в пределах рабочего хода подвески, и формируют, по меньшей мере, один дополнительный сигнал позиционного управления, который активируют на квазистатических режимах и переходных режимах движения системы с относительными скоростями выхода подвески на ограничители хода.
2. Компактная подвеска сиденья человека-оператора, содержащая основание, механизм преобразования движения, кинематическая цепь которого включает входное и выходное звенья, пневматический упругий элемент, дополнительный упругий элемент, установленный с возможностью неустойчивого движения при закритическом деформировании, а также механизм формирования и активации сигнала позиционного управления, содержащий блок подготовки воздуха и пневмораспределитель, отличающаяся тем, что подвеска снабжена дополнительной кинематической цепью геометрического замыкания подвески и дополнительного упругого элемента, а также, по меньшей мере, одним механизмом формирования и активации дополнительного сигнала позиционного управления, причем отношение параметров механизмов формирования и активации сигналов позиционного управления имеет значения порядка: 
где αin1, αex1 и αin2, αех2 - эффективные значения площадей проходных сечений дросселей на входе и выходе пневмораспределителей.
3. Компактная подвеска по п.2, отличающаяся тем, что дополнительная кинематическая цепь, связывающая основание и входное звено подвески, содержит не более двух подвижных соединений, одно из которых обеспечивает точечный или линейчатый контакт звеньев соединения и выполнено, например, в виде конической зубчатой передачи.
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И СИДЕНЬЕ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2115570C1 |
| JP 4201746 A, 22.07.1992 | |||
| US 4047759 A, 13.09.1977 | |||
| Сиденье транспортного средства | 1980 |
|
SU925695A1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И СИДЕНЬЕ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2115570C1 |
| US 4408744 A, 11.10.1983. | |||

