Изобретение относится к области машиностроения и может быть использовано при создании систем управления.
Механизм предназначен для использования в промышленности, а именно в машиностроении, робототехнике и других отраслях промышленности, где могут применяться механизмы со скрещивающимися осями.
Заявленное изобретение направлено на решение задачи, заключающейся в передаче заданного изменения угловых скоростей от ведущего к ведомому осям, произвольно расположенным в пространстве. При вращении ведущего звена с постоянной угловой скоростью угловая скорость ведомого звена будет изменяться по заданному условию.
Известен шарнирно-рычажный механизм Пенкина С.Н. для передачи вращения в противоположных направлениях с постоянным передаточным отношением один к одному (см. патент RU №2058504, 1996 г.), содержащий оси, шарниры, кривошипы.
Недостатком описанного аналога является невозможность передачи вращения между скрещивающимися осями.
Известен механизм передачи равных угловых скоростей между скрещивающимися осями (см. патент RU №2295078, 2005 г.).
Недостатком этого аналога можно считать невозможность передачи вращения с заданным изменением угловых скоростей между скрещивающимися осями.
Известны механизмы, содержащие криволинейные направляющие (см. А.С. №11494645, 1989 г. и А.С. №1514000, 1989 г.).
Недостатком названных аналогов можно считать невозможность передачи заданного изменения угловых скоростей между скрещивающимися осями.
Проведенный заявителем анализ уровня техники позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существующим признакам заявленного изобретения.
Технический результат: возможность передачи угловых скоростей между скрещивающимися осями, изменяющихся во время работы механизма согласно заданному условию.
Технический результат достигается тем, что механизм передачи заданного изменения угловых скоростей между скрещивающимися осями содержит ведущую и ведомую оси, две прямолинейных и одну криволинейную направляющие, кривошип, кулису, ползуны, соединенные между собой шарнирами, и его особенностью является то, что пространственный передаточный механизм составлен из двух плоских механизмов с общим пространственным ползуном, наличием ползуна и криволинейной направляющей с геометрией, обеспечивающей изменение во время работы механизма передаточного отношения по заданному условию.
Сущность изобретения поясняется чертежом. Пространственный передаточный механизм составлен из двух плоских механизмов, расположенных в плоскостях П1 и П2 и связанных между собой общим пространственным ползуном III с двумя шарнирами (см. вид «Т» чертежа). Произвольно расположенные в пространстве плоскости П1 и П2 определяются положениями точек А, В и ортов  ,
,  , перпендикулярных соответствующим плоскостям. Ведущее звено I вращается вокруг оси, параллельной орту
, перпендикулярных соответствующим плоскостям. Ведущее звено I вращается вокруг оси, параллельной орту  , ведомое звено IV - вокруг оси, параллельной орту
, ведомое звено IV - вокруг оси, параллельной орту  . Пространственный ползун III перемещается вдоль линии L1 ведущим звеном I и звеном II параллельно одной из плоскостей, например, плоскости П2. L1 - линия пересечения плоскостей П1 и П2. С ведомым звеном IV жестко связан ползун VII, перемещающийся по криволинейной направляющей; L2 - осевая линия криволинейной направляющей.
. Пространственный ползун III перемещается вдоль линии L1 ведущим звеном I и звеном II параллельно одной из плоскостей, например, плоскости П2. L1 - линия пересечения плоскостей П1 и П2. С ведомым звеном IV жестко связан ползун VII, перемещающийся по криволинейной направляющей; L2 - осевая линия криволинейной направляющей.
Геометрия криволинейной направляющей определяется расчетным путем согласно заданному условию: уравнением, таблицей, графиком.
Например, уравнением параболы, связывающим углы отклонения ведущего и ведомого звеньев:

где β - угол отклонения ведомого, α - ведущего звеньев механизма, Р - коэффициент уравнения.
Из (1) следует, что во время работы механизма его передаточное отношение будет изменяться по заданному условию.
В предлагаемом механизме возможен случай, представленный уравнением

т.е. механизм с заданным постоянным передаточным отношением. Для определения геометрии криволинейной направляющей L2 задается угол α, из (1) определяется соответствующий угол β и находятся координаты точки М (центр ползуна VII). Совокупность точек Mi (xi, yi) определит дискретную линию криволинейной направляющей L2.
Ползун V перемещается вдоль прямолинейной направляющей, представляющей ось кулисы VI.
Заявленный механизм передачи заданного изменения угловых скоростей между скрещивающимися осями представляет собой семизвенный механизм.
При использовании заявленного устройства обеспечивается передача угловых скоростей между ведущей и ведомой осями, связанных между собой заданным условием. Требуемая точность передачи угловых скоростей обеспечивается выполнением криволинейной направляющей на станке с числовым программным управлением.
Заявленное решение не оказывает отрицательного воздействия на состояние окружающей среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПЕРЕДАЧИ РАВНЫХ УГЛОВЫХ СКОРОСТЕЙ МЕЖДУ СКРЕЩИВАЮЩИМИСЯ ОСЯМИ | 2005 |
|
RU2295078C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
| ДВИГАТЕЛЬНЫЙ ПРИВОД ТОКОРАЗЪЕДИНИТЕЛЯ | 2007 |
|
RU2337261C1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| Устройство для перемешивания | 2022 |
|
RU2788075C1 |
| Кулисно-рычажный прямолинейно-направляющий механизм повышенной точности и привод для колесных транспортных средств, приводимых в движение мускульной силой человека | 2017 |
|
RU2664852C1 |
| УГЛОВАЯ ЗУБЧАТАЯ МУФТА ДЛЯ ПОДВИЖНЫХ ВАЛОВ | 2009 |
|
RU2418211C1 |
| Привод прерывистого движения роторов и конвейеров упаковочных машин | 1985 |
|
SU1274970A1 |
| Зубчато-рычажный кулисный механизм с выстоем ведомого звена | 1979 |
|
SU903628A1 |
| Замкнутая передача | 1990 |
|
SU1763771A1 |
Изобретение относится к области машиностроения и может быть использовано при создании систем управления, робототехнике и других отраслях промышленности, где могут применяться механизмы со скрещивающимися осями. Механизм передачи изменения угловых скоростей между скрещивающимися осями содержит ведущую и ведомые оси, две прямолинейных и одну криволинейную направляющие, кривошип, кулису, ползуны, соединенные между собой шарнирами. Пространственный передаточный механизм составлен из двух плоских механизмов, расположенных в двух плоскостях и связанных между собой общим пространственным звеном с двумя шарнирами. Криволинейная направляющая имеет геометрию, обеспечивающую изменения во время работы механизма передаточного отношения по заданному условию. Технический результат заключается в возможности передачи угловых скоростей между скрещивающимися осями, изменяющихся во время работы механизма согласно заданному условию. 3 з.п. ф-лы, 1 ил.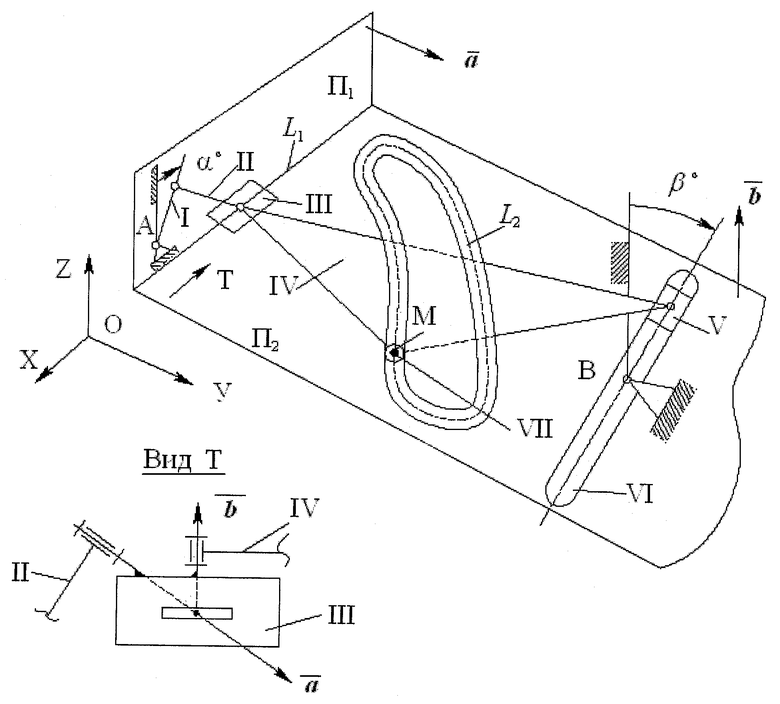
1. Механизм передачи заданного изменения угловых скоростей между скрещивающимися осями, содержащий ведущую и ведомую оси, две прямолинейных и одну криволинейную направляющие, кривошип, кулису, ползуны, соединенные между собой шарнирами, отличающийся тем, что пространственный передаточный механизм составлен из двух плоских механизмов с общим пространственным ползуном, наличием ползуна и криволинейной направляющей с геометрией, обеспечивающей изменение во время работы механизма передаточного отношения по заданному условию.
2. Механизм по п.1, отличающийся тем, что заданное условие представлено уравнением, отображающим зависимость углов отклонения ведущего и ведомых звеньев.
3. Механизм по п.1, отличающийся тем, что заданное условие представлено таблицей, отображающей зависимость углов отклонения ведущего и ведомых звеньев.
4. Механизм по п.1, отличающийся тем, что заданное условие представлено графиком, отображающим зависимость углов отклонения ведущего и ведомых звеньев.
| МЕХАНИЗМ ПЕРЕДАЧИ РАВНЫХ УГЛОВЫХ СКОРОСТЕЙ МЕЖДУ СКРЕЩИВАЮЩИМИСЯ ОСЯМИ | 2005 |
|
RU2295078C1 |
| Конденсатор бытового холодильника | 1984 |
|
SU1146524A1 |
| СПОСОБ ПОЛУЧЕНИЯ ХЛЕБОБУЛОЧНОГО ИЗДЕЛИЯ | 2010 |
|
RU2439913C1 |
| ПРИПЫЛ ДЛЯ ЛИТЕЙНЫХ ФОРМ, МОДЕЛЕЙ И СТЕРЖНЕВЫХ ЯЩИКОВ | 0 |
|
SU393022A1 |
| Пространственный рычажный механизм с периодическими остановками | 1991 |
|
SU1809209A1 |

