Изобретение относится к машиностроению и может быть использовано в робототехнике и автоматах, рабочие органы которых совершают возвратно-бинтовые движения с периодическими остановками в крайних положениях.
Целью изобретения является расширение кинематических возможностей за счет обеспечения возвратно-винтового движения ведомого звена.
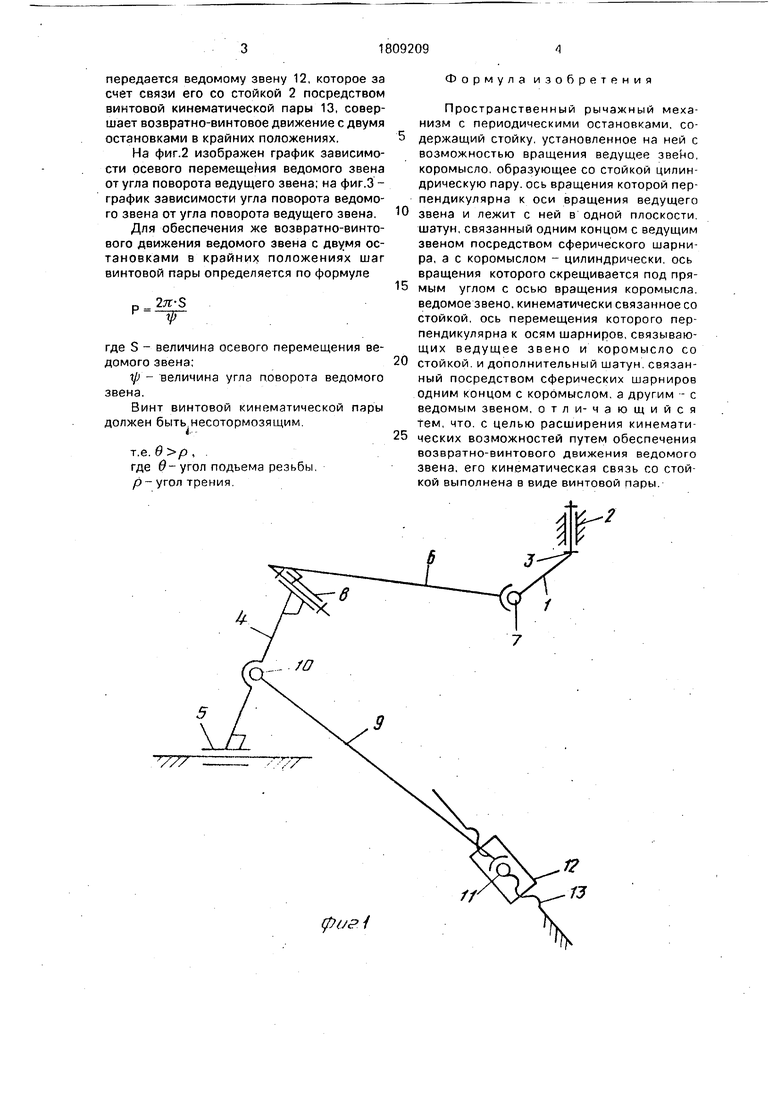
На фиг.1 изображена кинематическая схема пространственного рычажного механизма с Периодическими остановками.
Пространственный рычажный механизм с периодическими остановками содержит четырехзвенник, включающий ведущее звено 1, образующее со стойкой 2 вращательную пару 3, коромысло 4, образующее со стойкой цилиндрическую пару 5, ось вращения которой перпендикулярна оси вращения пары ведущего звена и лежит в одной плоскости с последней, шатун 6, образующий с ведущим звеном 1 и коромыслом 4 соответственно сферическую пару 7 и вращательную 8, ось вращения последней скрещивается под прямым углом с осью вращения цилиндрической пары 5. С коромыслом 4 четырехзвенника кинематически связана двузвенная группа, содержащая ведомое $вено 12 в виде ползуна, ось которого перпендикулярна оси вращения ведущего звена 1 и коромысла 4.
С коромыслом 4 четырехзвенника кинематически связана двузвенная группа, содержащая ведомое звено 12 в виде ползуна, Ось которого перпендикулярна оси вращения ведущего звена 1 и коромысла 4. дополнительный шатун 9, связанный с коромыслом 4 и ползуном 12 соответственно сферическими шарнирами 10 и 11. Ведомое звено (ползун) соединено со стойкой 2 посредством винтовой кинематической пары 13.
Пространственный рычажный механизм с периодическими остановками работает следующим образом.
При вращении ведущего звена 1 крутящий момент посредством шатуна 6, коромысла 4 и дополнительного шатуна 9
ел С
00
8
К О Ю
передается ведомому звену 12, которое за счет связи его со стойкой 2 посредством винтовой кинематической пары 13, совершает возвратно-винтовое движение с двумя остановками в крайних положениях,
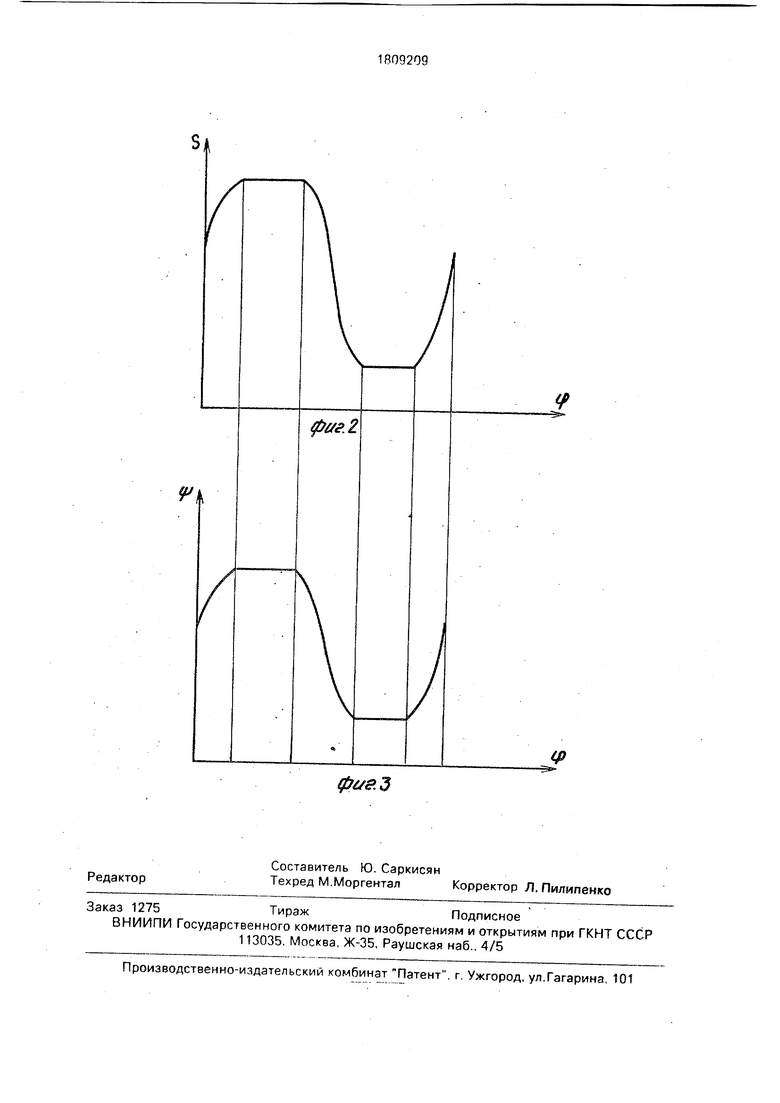
На фиг.2 изображен график зависимости осевого перемещения ведомого звена от угла поворота ведущего звена; на фиг.З - график зависимости угла поворота ведомого звена от угла поворота ведущего звена.
Для обеспечения же возвратно-винтового движения ведомого звена с двумя остановками в крайних положениях шаг винтовой пары определяется по формуле
Р
27T-S
Ґ
где S - величина осевого перемещения ведомого звена;
ty - величина угла поворота ведомого звена.
Винт винтовой кинематической пары должен быть.несотормозящим.
т.е. , .
где (-угол подъема резьбы,
р- угол трения.
Формула изобретения
Пространственный рычажный механизм с периодическими остановками, содержащий стойку, установленное на ней с возможностью вращения ведущее звено, коромысло, образующее со стойкой цилиндрическую пару, ось вращения которой перпендикулярна к оси вращения ведущего звена и лежит с ней в одной плоскости. шатун, связанный одним концом с ведущим звеном посредством сферического шарнира, а с коромыслом - цилиндрически, ось вращения которого скрещивается под прямым углом с осью вращения коромысла, ведомое звено, кинематически связанное со стойкой, ось перемещения которого перпендикулярна к осям шарниров, связывающих ведущее звено и коромысло со стойкой, и дополнительный шатун, связанный посредством сферических шарниров одним концом с коромыслом, а другим - с ведомым звеном, отл и-чающийся тем, что. с целью расширения кинемати- 5 ческих возможностей путем обеспечения возвратно-винтового движения ведомого звена, его кинематическая связь со стойкой выполнена в виде винтовой пары.
0
5
0
fiw.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Пространственный рычажный механизм с периодическими остановками | 1985 |
|
SU1307134A1 |
| Пространственный регулируемый рычажный механизм | 1986 |
|
SU1315696A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| Пространственный рычажныйМЕХАНизМ C пЕРиОдичЕСКОйОСТАНОВКОй | 1978 |
|
SU796574A1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2008 |
|
RU2369430C1 |
Изобретение относится к машиностроению. Цель изобретения - расширение кине- матических возможностей за счет обеспечения возвратно-винтового движения ведомого звена. При вращении ведущего звена 1 крутящий момент посредством шатуна 6, коромысла 4 и дополнительного шатуна 9 передается ведомому звену 12, которое за счет связи его со стойкой 2 посредством винтовой кинематической пары 13, совершает возвратно-винтовое движение с двумя остановками в крайних положениях. 3 ил.
| Пространственный кривошипно-шатунный механизм с остановкой | 1989 |
|
SU1677432A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Пространственный рычажный механизм с периодическими остановками | 1985 |
|
SU1307134A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
