Изобретение относится к области машиностроения и может быть использовано при создании систем управления.
Механизм предназначен для использования в промышленности, а именно в машиностроении, самолетостроении, робототехнике и других отраслях промышленности, где могут применяться манипуляторы, механизмы управления со скрещивающимися осями.
Заявляемое изобретение направлено на решение задачи, заключающейся в передаче равных угловых скоростей в механизмах от ведущей к ведомой осям, произвольно расположенным в пространстве.
Известен шарнирно-рычажный механизм Пенкина С.Н. для передачи вращения в противоположных направлениях с постоянным передаточным отношением один к одному (см. патент RU №2058504, 1996 г.), содержащий оси, шарниры, кривошипы.
Недостатком описанного аналога является невозможность передачи вращения с равной скоростью между скрещивающимися осями.
Известен также шарнирно-рычажный механизм (см. заявку №94016943, 1996 г.), содержащий оси, шарниры, кривошипы.
Недостатком этого аналога также можно считать невозможность передачи равной угловой скорости между скрещивающимися осями.
Проведенный заявителем анализ уровня техники позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения.
Технический результат - возможность передачи равных угловых скоростей между скрещивающимися осями.
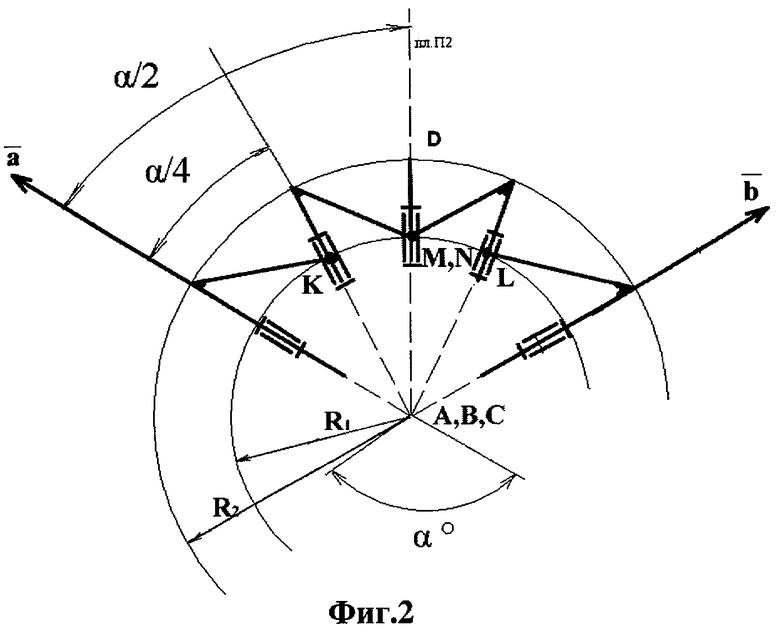
Сущность изобретения поясняется чертежами, где на фиг.1 изображена кинематическая схема шестизвенного механизма для передачи равных угловых скоростей между скрещивающимися осями; на фиг.2 - кинематическая схема механизма, вид сбоку.
На фиг.1 показаны произвольно расположенные в пространстве скрещивающиеся прямые  и
и  , точки А и В представляют основание общего перпендикуляра АВ к рассматриваемым прямым
, точки А и В представляют основание общего перпендикуляра АВ к рассматриваемым прямым  и
и  , заданным ортами и и точками S и J. Передача равных угловых скоростей w1, w2 между осями и осуществляется за счет того, что механизм выполнен симметричным относительно плоскостей П1 и П2. Механизм содержит звенья 1, 2 и 4, 5, имеющие одинаковые размеры. Звено 1 (ведущее, входное) равно звену 4, а звено 2 равно звену 5 (ведомое, выходное). Звено 3 расположено в плоскости П2 и выполнено симметричным относительно плоскости П1. АВ - общий перпендикуляр к ортам и , АС равно АВ/2, П1, П2 - плоскости симметрии механизма. Плоскость П1 перпендикулярна АВ, плоскость П2 перпендикулярна П1, α° - угол между ортами а и b, R1 и R2 - произвольные величины. К, L, М, N - точки шарнирного соединения звеньев 1, 2, 3, 4, 5; С - середина перпендикуляра АВ.
, заданным ортами и и точками S и J. Передача равных угловых скоростей w1, w2 между осями и осуществляется за счет того, что механизм выполнен симметричным относительно плоскостей П1 и П2. Механизм содержит звенья 1, 2 и 4, 5, имеющие одинаковые размеры. Звено 1 (ведущее, входное) равно звену 4, а звено 2 равно звену 5 (ведомое, выходное). Звено 3 расположено в плоскости П2 и выполнено симметричным относительно плоскости П1. АВ - общий перпендикуляр к ортам и , АС равно АВ/2, П1, П2 - плоскости симметрии механизма. Плоскость П1 перпендикулярна АВ, плоскость П2 перпендикулярна П1, α° - угол между ортами а и b, R1 и R2 - произвольные величины. К, L, М, N - точки шарнирного соединения звеньев 1, 2, 3, 4, 5; С - середина перпендикуляра АВ.
Заявляемый механизм передачи равных угловых скоростей между скрещивающимися осями представляет собой шестизвенный пространственный механизм.
При использовании заявляемого устройства обеспечивается передача равных угловых скоростей между ведущей и ведомой осями.
Заявляемое решение не оказывает отрицательного воздействия на состояние окружающей среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПЕРЕДАЧИ ЗАДАННОГО ИЗМЕНЕНИЯ УГЛОВЫХ СКОРОСТЕЙ МЕЖДУ СКРЕЩИВАЮЩИМИСЯ ОСЯМИ | 2009 |
|
RU2395737C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2019 |
|
RU2713662C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| УГЛОВАЯ ЗУБЧАТАЯ МУФТА ДЛЯ ПОДВИЖНЫХ ВАЛОВ | 2009 |
|
RU2418211C1 |
| ШАРНИР РАВНЫХ УГЛОВЫХ СКОРОСТЕЙ | 2012 |
|
RU2518883C2 |
| Схват манипулятора | 1985 |
|
SU1348168A1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
Изобретение относится к машиностроению, а именно к отраслям промышленности, где могут применяться манипуляторы и механизмы управления со скрещивающимися осями. Механизм передачи равных угловых скоростей между скрещивающимися осями состоит из ведущей и ведомой осей и шести шарнирно соединенных звеньев, симметрично расположенных между осями. Технический результат заключается в возможности передачи вращения с равной скоростью между скрещивающимися осями. 2 ил.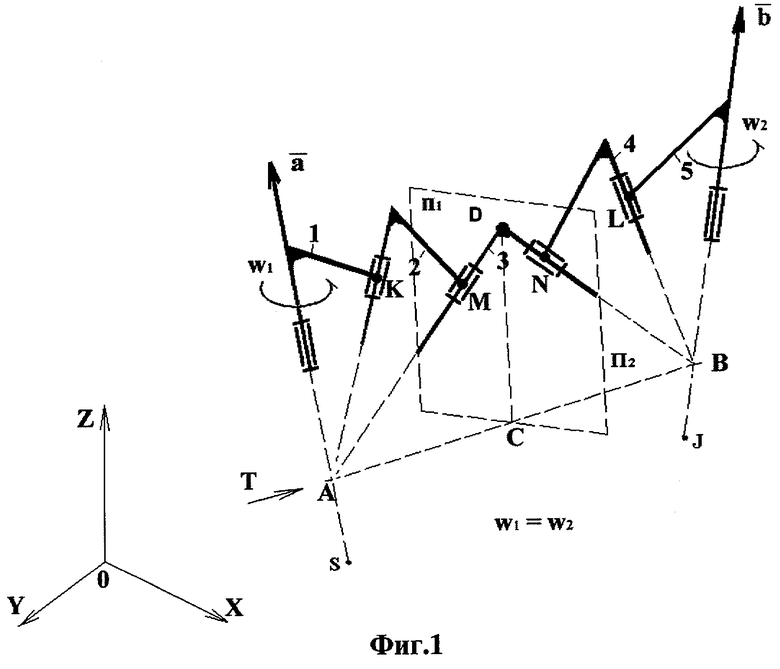
Механизм передачи равных угловых скоростей между скрещивающимися осями, содержащий ведущую и ведомую оси и шесть звеньев, соединенных между собой шарнирами, отличающийся тем, что ведущая и ведомая оси, произвольно расположенные в пространстве, представляют собой скрещивающиеся прямые, плоскость симметрии механизма проходит через центр общего перпендикуляра, восстановленного к ведущей и ведомой осям, и перпендикулярна упомянутому общему перпендикуляру, а звенья механизма расположены симметрично между осями и звенья механизма, расположенные по разным сторонам плоскости симметрии, имеют одинаковые размеры.
| RU 94016943 A1, 10.05.1996 | |||
| Шарнирно-рычажный механизм | 1979 |
|
SU947536A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСТАТОЧНОЙ НЕФТЕНАСЫЩЕННОСТИ ПЛАСТОВ | 2003 |
|
RU2248444C2 |
| Шарнирно-рычажный механизм редуктора угловой скорости | 1986 |
|
SU1511496A1 |

