товидной кулисой 6s трехповодковый кривошип 9, у которого два гшеча 10 и 11 лежат на одной прямой к имеют одинаковую длину равную расстоянию мелоду ведущим 1 и дополнительным 8 валами,кулачково--кулисно-ползуниый механизм замыкания и размьжания и механизм фиксации позиционного диска 3, а также шатун 23 и кулису 24. При равномерном вращении кулисы 6 шарнир М очерчивает сложную траекторию с двумя дугами окружностей одинакового радиуса. Поэтому при длине
шатуна 23, равной этому радиусу, кулиса 24 в крайних положениях имеет выстой вместе с позиционным диском 3. При этом плавно осуществляется прерывистое движение, замыкание, размыкание и фиксация позиционного диска. Привод можно проектировать для любого числа позиционных остановок. Отсутствие высших кинематических пар в кулисно-рычажном механизме периодического поворота диска позволяет повысить долговечность тяжелонагружен- ньк упаковочных машин. 1 ил.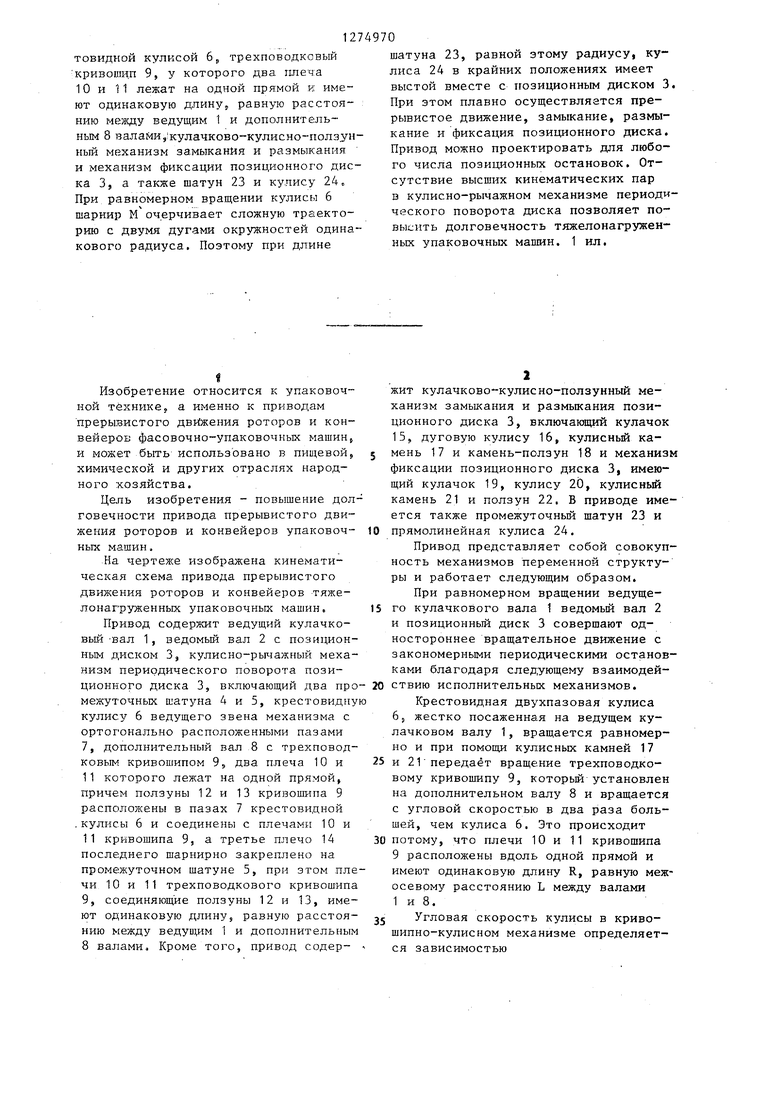

| название | год | авторы | номер документа |
|---|---|---|---|
| Привод прерывистого движения роторов упаковочных машин | 1980 |
|
SU975504A1 |
| Привод прерывистого движения роторов упаковочных машин | 1976 |
|
SU590186A1 |
| Привод прерывистого движения роторов упаковочных машин | 1986 |
|
SU1366445A1 |
| Привод прерывистого движения роторов упаковочных машин | 1978 |
|
SU763198A1 |
| Привод прерывистого движения роторов упаковочных машин | 1983 |
|
SU1109343A2 |
| Привод прерывистого движения роторов и конвейеров упаковочных машин | 1985 |
|
SU1353692A1 |
| Привод прерывистого движения грузонесущего органа упаковочной машины | 1984 |
|
SU1284893A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2002 |
|
RU2237175C2 |
| Кривошипно-кулисный механизм с остановками | 1985 |
|
SU1260610A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
Изобретение относится к приводам фасовочно-упаковочного оборудования, может быть использовано в мноГОПОЗИЦИОН1.ЫХ технологических автоматах, различных отраслях народного хозяйства и направлено.на повышение долговечности. Привод содержит кулисно-рычажньй механизм периодического поворота позиционного диска 3 с крес
Изобретение относится к упаковочной технике, а именно к приводам прерывистого движения роторов и конвейеров фасовочно-упаковочных машин и может быть использовано в пищевой химической и других отраслях народного хозяйства.
Цель изобретения - повышение долговечности привода прерывистого движения роторов и конвейеров упаковочных машин.
На чертелсе изображена кинематическая схема привода прерывистого движения роторов и конвейеров тяжелонагруженных упаковочных машин,
Привод содержит ведущий кулачковый -вал 1, ведомьй вал 2 с позиционным диском 3, кулисно-рычажный механизм периодического поворота позиционного диска 3, включающий два про межуточных шатуна 4 и 5, крестовидну кулису 6 ведущего звена механизма с ортогонально расположенными пазами 7, дополнительный вал 8 с трехповодковым кривошипом 9, два плеча 10 и 11 которого лежат на одной прямой, причем ползуны 12 и 13 кривошипа 9 распололсены в пазах 7 крестовидной .кулисы 6 и соединены с плечами 10 и 11 кривошипа 9, а третье плечо 14 последнего шарнирно закреплено на промежуточном шатуне 5, при этом плечи 10 и 11 трехповодкового кривошипа 9, соединяющие ползуны 12 и 13, имеют одинаковую длину, равную расстоянию между ведуищм 1 и дополнительным 8 валами. Кроме того, привод содержит кулачково-кулисно-ползунный механизм замыкания и размыкания позиционного диска 3, включакяций кулачок 15, дуговую кулису 16, кулисньй камень 17 и камень-ползун 18 и механиз фиксации позиционного диска 3, имеющий кулачок 19, кулису 20, кулисньй камень 21 и ползун 22, В приводе имеется также промежуточньш шатун 23 и прямолинейная кулиса 24.
Привод представляет собой совокупность механ-измов переменной структуры и работает следующим образом.
При равномерном вращении ведущего кулачкового вала 1 ведомый вал 2 и позиционньй диск 3 совершают одностороннее вращательное движение с закономерными периодическими остановками благодаря следующему взаимодействию исполнительных механизмов.
Крестовидная двухпазовая кулиса 6j жестко посаженная на ведущем кулачковом валу 1, вращается равномерно и при помоЕци кулисных камней 17 и 21 передаёт вращение трехповодковому кривошипу 9, которьй установлен на дополнительном валу 8 и вращается с угловой скоростью в два раза большей, чем кулиса 6. Это происходит потому, что плечи 10 и 11 кривошипа 9 расположены вдоль одной прямой и имеют одинаковую длину R, равную межосевому расстоянию L между валами 1 и 8.
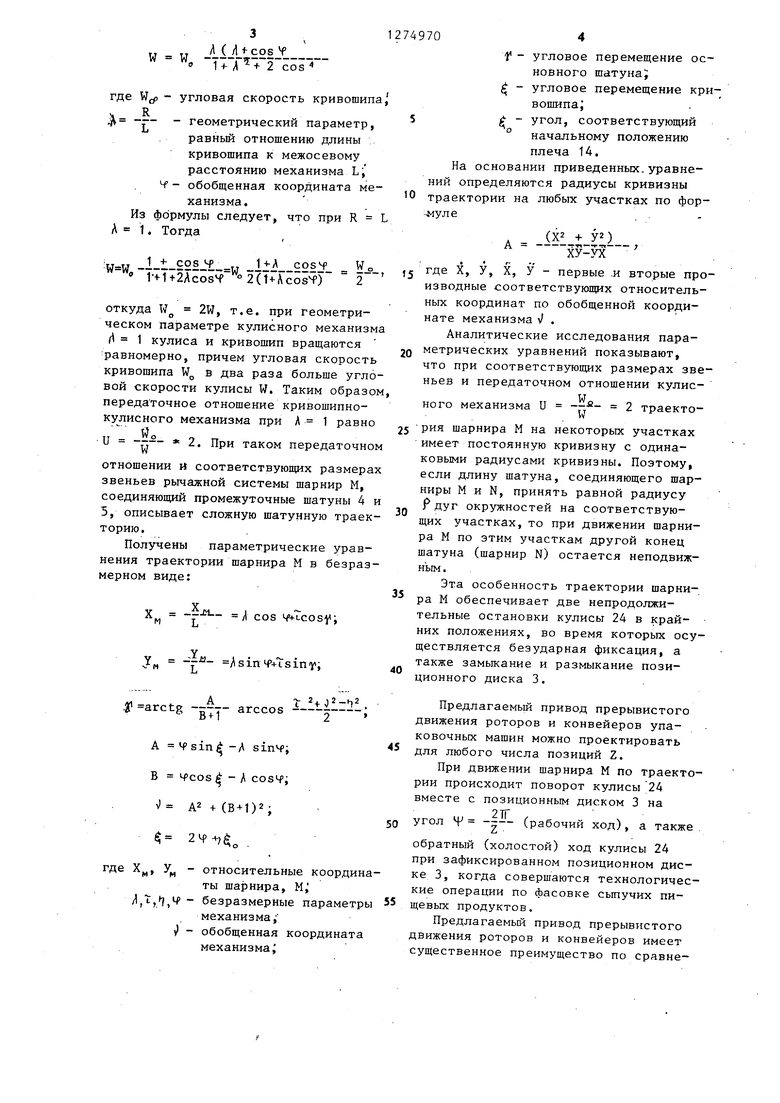
Угловая скорость кулисы в кривошипно-кулисном механизме определяется зависимостью Д ( /Itcos P w w. -(-T+Fcos где Wff - угловая скорость кривошип -- - геометрический параметр, равньй отношению длины кривошипа к межосевому расстоянию механизма L; Ч - обобщенная координата ме ханизма. Из формулы следует, что при R А 1. Тогда и cosy W, w-Wo -:j- 2Acos Ч, 5(TAcSs) 2 откуда W 2W, т.е. при геометрическом параметре кулисного механиз 1 кулиса и кривошип вращаются равномерно, причем угловая скорост кривошипа Wjj в два раза больше угл вой скорости кулисы W. Таким образ передаточное отношение кривошипнокулисного механизма при А 1 равн И и 2. При таком передаточн отношении и соответствующих размер звеньев рычажной системы шарнир М, соединяющий промежуточные шатуны 4 5, описывает сложную шатунную трае торию. Получены параметрические урав нения траектории шарнира М в безра мерном виде: X X Я COS 4 Lcosy; у У„ /sin f- tsiпy; л1 А Т .3 arctg -g7 arccos А 4sin -A В - / v) A2 + ()2; 2Ч-,$„ . где Х|, У| - относительные координ ты шарнира, М; , - безразмерные параметр механизма,у) - обобщенная координата механизма; 704 Y угловое перемещение основного шатунаJ - угловое перемещение кривошипа - угол, соответствующий ° начальному положению плеча 14. На основании приведенных.уравнений определяются радиусы кривизны траектории на любых участках по формулеUf. + У) ХУ-УХ где X, У, X, у - первые .и вторые производные соответствующих относительных координат по обобщенной координате механизма . Аналитические исследования параметрических уравнений показывают, что при соответствуюш 1х размерах звеньев и передаточном отношении кулисного механизма U г, 2 траектория шарнира М на некоторых участках имеет постоянную кривизну с одинаковыми радиусами кривизны. Поэтому, если длину шатуна, соединяющего шарниры М и N, принять равной радиусу Р дуг окружностей на соответствующих участках, то при движении шарнира М по этим участкам другой конец шатуна (шарнир N) остается неподвижным. Эта особенность траектории шарнира М обеспечивает две непродолжительные остановки кулисы 24 в край- них положениях, во время которых осуществляется безударная фиксация, а также замыкание и размыкание позиционного диска 3. Предлагаемый привод прерывистого движения роторов и конвейеров упаковочных машин можно проектировать для любого числа позиций Z. При движении шарнира М по траектории происходит поворот кулисы 24 вместе с позиционным диском 3 на 1и 2ТГ X „ ч угол т --- (.рабочий код;, а также обратный (холостой) ход кулисы 24 при зафиксированном позиционном диске 3, когда совершаются технологические операции по фасовке сыпучих пищевых продуктов. Предлагаемый привод прерывистого движения роторов и конвейеров имеет существенное преимущество по срявнению с известным, так как в самом тяжелонагруженном механизме периодического поворота высшие кинематические пары отсутствуют. Замена высших кинематических пар низшими парами на 22% уменьшает контактные напряжения, что не только резко снижает износ элементов кинематических пар, увеличивает долговечность привода и надежность его работы, но и дает воз- ю можность осуществлять технологические процессы по фасовке и упаковке сьтучих пищевых продуктов на форсированных режимах работы при увеличенном темпе движения входного вала, что в
свою очередь позволяет-повысить производительность тяжелонагруженных упаковочных машин на 9-11%.
Формула изобретения 20
Привод прерывистого движения роторов и конвейеров упаковочных машин, содержащий ведущий кулачковый вал, ведомьш вал с позиционным диском. 1274 5 t5
положены в пазах крестовидной кулисы и Соединены с указанными плечами трехповодкового кривошипа, а третье плечо последнего шарнирно закреплено на одном из промежуточных шатунов, при этом плечи трехповодкового кривошипа, соединяющие ползуны, имеют одинаковую длину, равную расстоянию межhy ведущим и дополнительными валами. ,704 дополнительный вал, кулисно-рьгчажньш механизм периодического поворота позиционного диска, включающий два промежуточных шатуна, кулачково-кулисноползунный механизм замыкания и размыкания позиционного диска, отличающийся тем, что, с Целью повышения долговечности, кулиса ведущего звена механизма периодического поворота позиционного диска выполнена крестовидной с ортогонально расположенными пазами, а на дополнительном валу установлен трехповодковый кривошип, два плеча которого лежат на одной прямой, причем его ползуны рас
| Привод прерывистого движения роторов упаковочных машин | 1983 |
|
SU1109343A2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
