Изобретение относится к области измерительной техники и может быть использовано для контроля технического состояния железнодорожного подвижного состава.
На поверхности катания колеса железнодорожного подвижного состава могут присутствовать различные дефекты (ползун, наплыв, навар, выщерблина, трещина, кольцевая выработка и проч.). Своевременное обнаружение и идентификация этих дефектов является важной задачей с точки зрения обеспечения безопасной эксплуатации подвижного состава железных дорог.
Известен способ обнаружения дефектов на поверхности катания колеса подвижного состава, в котором посредством камеры регистрируется изображение, соответствующее совокупности световых линий (поперечных профилей) на поверхности катания колеса, производится обработка и анализ полученного изображения для выявления дефектов на поверхности катания, например трещин (заявка Японии №5126686, МПК 5 G01M 17/10, 1993 г.).
Недостатком известного способа является то, что он позволяет получить только двумерную картину распределения дефектов и других неоднородностей неизвестной природы на изображении поверхности катания без информации о глубине залегания дефектов. Как следствие, возможность надежного обнаружения дефектов и их классификации отсутствует.
Известен способ обнаружения дефектов на поверхности катания колеса подвижного состава, заключающийся в освещении поверхности катания колеса статическим растром из вееров световых лучей, последовательной регистрации всех лучей одного веера совокупностью фотоприемников, измерении временных интервалов между откликами фотоприемников, сравнении экспериментально измеренных временных интервалов с такими же временными интервалами при использовании эталонного колеса и расчете отклонения параметров реальной поверхности катания от эталонной поверхности катания с последующим выявлением дефектов (Патент РФ №2122956, МПК 6 B61K 9/12, 1998 г.).
Недостаток указанного способа объясняется тем, что в реальных условиях он не позволяет определить наличие дефектов на поверхности катания. Это связано с тем фактом, что на практике после прохождения операции обточки колесной пары в процессе ремонта в вагонных депо поверхность колеса отклоняется от эталонной. Поэтому универсальной эталонной поверхности катания для целей сравнения - как это предполагается в указанном способе - не существует.
В качестве ближайшего аналога заявляемого технического решения по достигаемому эффекту выбран способ обнаружения дефектов на поверхности катания колеса железнодорожного подвижного состава, заключающийся в том, что приводят колесо во вращение, облучают поверхность катания световыми лучами, регистрируют отраженное излучение, осуществляют обработку и анализ информационного сигнала о поверхности катания с последующим обнаружением дефектов (Патент Японии №3219358, МПК 7 G01M 17/10, 2001 г.).
Указанный способ характеризуется ограниченными функциональными возможностями, поскольку позволяет получить только двумерную картину топологии поверхности и, соответственно, двумерную картину распределения дефектов на поверхности катания колеса. Информацию о глубине залегания дефектов получить нельзя, и поэтому полученные данные дают только ограниченную информацию о типе дефектов и их размере. Соответственно, осуществить корректную классификацию дефектов не представляется возможным.
Задача, решаемая изобретением, - расширение функциональных возможностей способа обнаружения дефектов на поверхности катания колеса железнодорожного подвижного состава.
Указанная задача решается тем, что в способе обнаружения дефектов на поверхности катания колеса железнодорожного подвижного состава, в котором приводят колесо во вращение, облучают поверхность катания световыми лучами, регистрируют отраженное излучение, осуществляют обработку и анализ информационного сигнала о поверхности катания с последующим обнаружением дефектов, используют для облучения поверхности катания излучение, формируемое триангуляционными датчиками; регистрацию отраженного излучения осуществляют посредством регистрации поперечных профилей поверхности катания с последующим построением по ним совокупности продольных профилей колеса и аппроксимации продольных профилей окружностями со средними радиусами Ro; в качестве информационного сигнала используют совокупность сигналов Uo(t), пропорциональных разности (Rt-Ro), где t - время, Rt - радиусы упомянутых окружностей в точках, соответствующих положению поперечных профилей поверхности катания, причем определяют сигналы Uo(t) для каждого продольного профиля; обработку информационных сигналов производят путем вычитания из сигналов Uo(t) постоянной составляющей, соответствующей среднему радиусу Ro, прямого преобразования Фурье сигналов Uo(t) в сигналы F(f), где f - частота, определения эксцесса и эллиптичности колеса как первой и второй гармоник ряда Фурье, соответственно, фильтрации сигнала F(f), осуществления обратного преобразования Фурье, представления упомянутых первой и второй гармоник во временной области и их вычитания из сигналов Uo(t) с формированием разностных сигналов, а анализ информационного сигнала осуществляют посредством пороговой обработки разностных сигналов с последующим построением топологической картины поверхности катания путем совместного исследования разностных сигналов, соответствующим совокупности всех продольных сечений, и обнаружения дефектов с использованием методов кластерного анализа.
В варианте технического решения для облучения поверхности катания используют световое излучение, формируемое тремя триангуляционными датчиками, размещенными по окружности колеса.
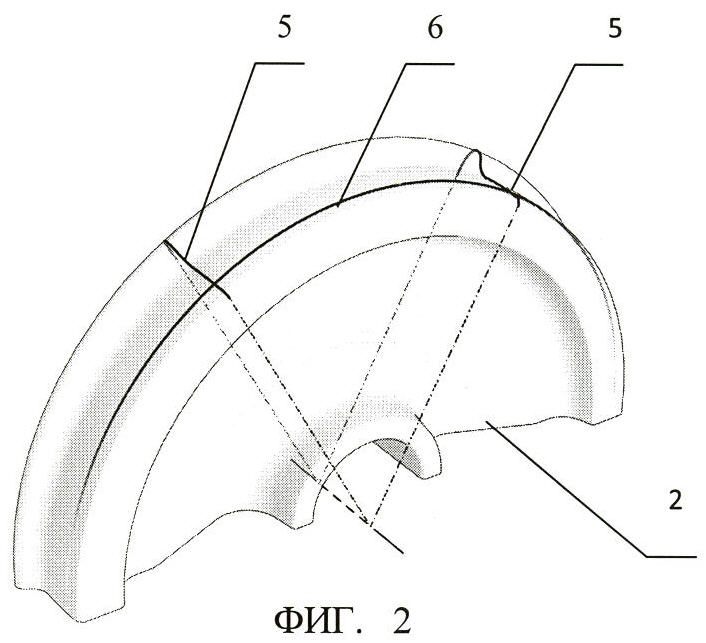
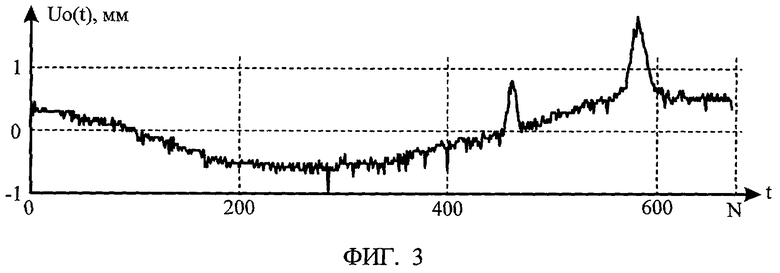
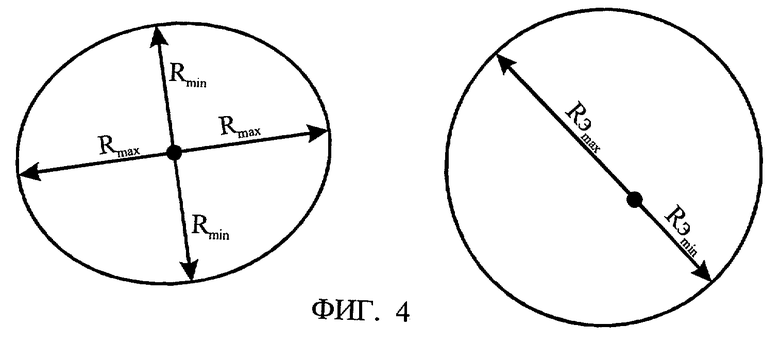
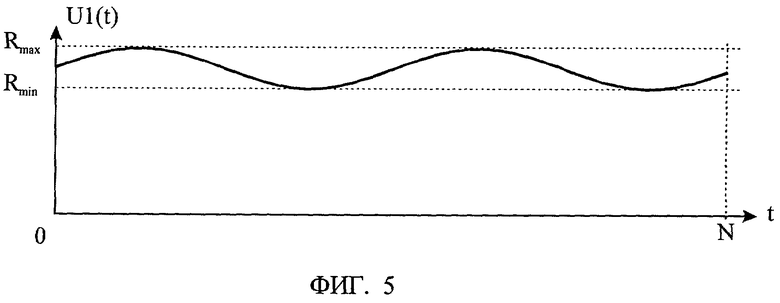
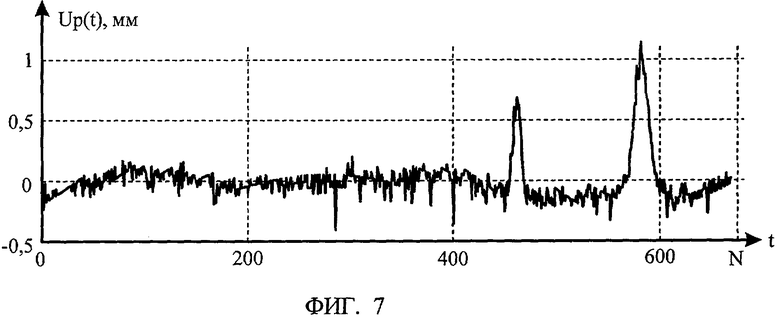
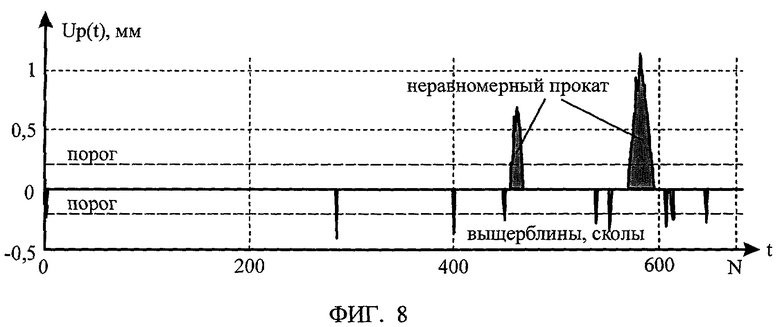
Изобретение иллюстрируется графическими материалами. На фиг.1 схематически показано устройство, при помощи которого реализуется предлагаемый способ, на фиг.2 иллюстрируется формирование поперечных и продольных профилей, на фиг.3 приведена форма исходного сигнала Uo(t) во временной области, на фиг.4 иллюстрируются эллиптичность и эксцесс колеса, на фиг.5 показана форма гармоники U1, соответствующей эллиптичности колеса, на фиг.6 приведена форма гармоники U2, соответствующей эксцессу колеса, на фиг.7 показан сигнал, соответствующий наличию дефектов на поверхности катания, до пороговой обработки, на фиг.8 - тот же сигнал после пороговой обработки.
Устройство для реализации предлагаемого способа включает три лазерных триангуляционных датчика 1, расположенных по окружности колеса железнодорожного подвижного состава 2 над поверхностью катания колеса 2 на некотором расстоянии друг от друга, механизм вращения колеса 3 и блок обработки информации 4, связанный с датчиками 1. Датчики 1 могут быть расположены, например, на расстоянии 120° друг от друга.
Заявляемый способ реализуется следующим образом. Колесо 2 приводится во вращение, и датчики 1 через равные промежутки времени проектируют на поверхность катания колеса 2 световые лучи. В результате пересечения плоскости триангуляции датчиков 1 и поверхности катания на ней формируются на равном расстоянии друг от друга световые линии, покрывающие всю поверхность катания колеса. На один оборот колеса приходится примерно 600 замеров при выбранной скорости съема данных датчиками 1, что определяет шаг поперечных профилей равным примерно 5 мм при диаметре колеса около 1 метра.
Датчики 1 регистрируют отраженный световой сигнал, соответствующий поперечному профилю 5 поверхности катания на данном локальном участке поверхности катания. В процессе вращения колеса регистрируется совокупность поперечных профилей, которые получаются в результате пересечения плоскости триангуляции датчика 1 и поверхности катания колеса 2. Отдельный профиль (световую линию) 5 можно рассмотреть как совокупность большого числа точек. После того как зарегистрировано получившееся число поперечных профилей, что определяется скоростью съема данных датчиками 1 и скоростью вращения колеса, из всего массива точек, принадлежащих всем поперечным профилям, формируются т.н. продольные профили 6, образующиеся в результате пересечения поверхности катания плоскостями, проекции которых на ось колеса 2 перпендикулярны его оси. Каждый поперечный профиль содержит N точек, и, таким образом, из совокупности М поперечных профилей можно выделить N продольных профилей. Как следствие, колесо можно представить как совокупность N продольных профилей.
Далее каждый продольный профиль аппроксимируется окружностью, например, с помощью метода наименьших квадратов. Так как реально каждая точка продольного сечения может находиться на различном расстоянии от оси колеса, определяется текущий радиус Rt в каждой точке конкретного продольного сечения, и рассчитывается средний радиус Ro для данного продольного сечения. Отметим, что для корректного определения среднего радиуса Ro необходимо использовать не менее трех световых линий на поверхности катания (т.е. необходимо использовать как минимум три триангуляционных датчика 1).
После того как Ro определен, находится разность (Rt-Ro) для каждого из N отсчетов (для каждой точки поперечного профиля в данном продольном профиле).
В результате получается совокупность N результирующих сигналов Uo(t), несущих информацию об отклонении реальной геометрии продольных сечений от номинальной, характеризующейся нулевой разностью (Rt-Ro). Ненулевые значения разности (Rt-Ro) свидетельствуют о наличии эллиптичности и/или эксцесса и о возможном присутствии на поверхности катания различных дефектов.
Теоретические исследования, проведенные авторами, показали возможность использования для оценки ряда параметров тел вращения (например, диаметра, эллиптичности и эксцесса - смещения оси колеса от номинальной величины) методов спектрального анализа.
В предлагаемом способе для оценки эллиптичности и эксцесса используются параметры соответствующих гармоник амплитудного спектра. С этой целью производится - с помощью прямого преобразования Фурье, реализуемого в блоке обработки информации 4, - преобразование сигнала Uo(t), находящегося во временной области, в сигнал F(f), находящийся в частотной области. Предварительно из сигнала Uo(t) исключается постоянная составляющая, соответствующая среднему радиусу Ro.
Параметры эксцесса могут быть описаны первой гармоникой ряда Фурье, а параметры эллиптичности - второй гармоникой ряда Фурье. Следует отметить, что овальность колеса - как показали экспериментальные данные - хорошо описывается модельным представлением в форме эллипса, или, иначе говоря, овальность колеса можно рассматривать как его эллиптичность.
Затем осуществляется фильтрация сигнала F(f) для исключения неинформационных гармонических составляющих (т.е. всех, кроме 1-й и 2-й гармоник) и обратное преобразование Фурье для представления первой и второй гармоник во временной области. Из фиг.5, 6 видно, что на один оборот колеса приходится два периода гармонического колебания U1, соответствующего эллиптичности колеса, и один период гармонического колебания U2, соответствующего эксцессу. Экспериментальные исследования, проведенные авторами, показали, что на практике эксцесс, как правило, не превышает величину, равную 3 мм, что при среднем диаметре колеса 1000 мм позволяет корректно описывать эксцесс гармоническим колебанием.
На следующей стадии способа из результирующего сигнала вычитается сумма первой и второй гармоник, т.е. смесь гармонических колебаний, описывающих эксцесс и эллиптичность. Необходимость такого вычитания обусловлена тем, что эти составляющие сигнала могут быть сопоставимы по амплитуде с некоторыми дефектами. Так, например, глубина ползуна может быть 0,5 мм и более, что меньше величины эксцесса.
Результирующий разностный сигнал Up(t) представляет собой совокупность распределенных случайным образом сигналов Ud, соответствующих различным дефектам на поверхности катания (их высотам/глубинам). Далее производится пороговая обработка, и все сигналы Ud, превышающие установленный порог, используются для построения картины распределения дефектов на поверхности катания.
Классификация дефектов осуществляется с применением кластерного анализа и на основе заранее установленных критериев, связанных с характером дефектов, их размерами и расстоянием между ними. Сущность кластерного анализа заключается в том, что схожие по количественным признакам объекты группируются в кластеры (группы), соответствующие тому или иному дефекту. Знак кластера определяется его положением относительно тренда кривой на фиг.7: выше тренда кривой находятся кластеры со знаком «+», ниже тренда кривой - со знаком «-». Таким образом, на фиг.7 присутствуют два кластера со знаком «+».
Знак кластера определяет тип дефекта. Так, например, к кластерам со знаком «+» относятся такие дефекты как навары, наплывы, а к кластерам со знаком «-» - выбоины, выщерблины, ползун. Площадь и отношение сторон кластера позволяет отличить протяженные дефекты от более компактных, например кольцевую выработку от выщерблины.
Для нахождения и классификации дефектов необходимо знать глубину их залегания, что обеспечивается применением триангуляционных лазерных датчиков.
Совместный анализ дефектов в соседних продольных сечениях позволяет построить полную топологию поверхности катания колеса, обнаружить дефекты на поверхности катания колеса и произвести классификацию дефектов по их оцененным параметрам.
Таким образом, заявляемый способ по сравнению с ближайшим аналогом характеризуется более широкими функциональными возможностями, так как он позволяет получить полную информацию о наличии, распределении и характере различных дефектов на поверхности катания колеса подвижного состава.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ ПОВЕРХНОСТИ КАТАНИЯ ЖЕЛЕЗНОДОРОЖНОЙ КОЛЕСНОЙ ПАРЫ | 2011 |
|
RU2483958C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ДВИЖУЩЕЙСЯ КОЛЕСНОЙ ПАРЫ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2023 |
|
RU2818377C1 |
| Способ акустического контроля состояния буксовых узлов движущегося поезда | 2022 |
|
RU2781416C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ПОВЕРХНОСТИ КАТАНИЯ КОЛЕСА ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2280577C1 |
| АКУСТИЧЕСКИЙ СПОСОБ ОБНАРУЖЕНИЯ НЕИСПРАВНОСТИ РЕЛЬСОВОГО ПУТИ | 2012 |
|
RU2511644C1 |
| СПОСОБ МОНИТОРИНГА ПАРАМЕТРОВ КОЛЕСНОЙ ПАРЫ И ЕЕ ПОЛОЖЕНИЯ ОТНОСИТЕЛЬНО РЕЛЬСОВОГО ПУТИ | 2003 |
|
RU2266226C2 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА ПОВЕРХНОСТИ КАТАНИЯ ГОЛОВКИ РЕЛЬСА | 2017 |
|
RU2652511C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ КОЛЕСНЫХ ПАР И ТЕЛЕЖЕК ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2023 |
|
RU2808857C1 |
| СПОСОБ ДИАГНОСТИКИ ПОВЕРХНОСТИ КАТАНИЯ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА И МЕТРОПОЛИТЕНА | 2010 |
|
RU2466047C2 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ ПОДОШВЫ РЕЛЬСОВ | 2020 |
|
RU2736177C1 |
Изобретение относится к области измерительной техники и может быть использовано для контроля технического состояния железнодорожного подвижного состава. Согласно способу поверхность катания колеса железнодорожного подвижного состава облучают световым излучением, формируемым триангуляционными датчиками. Далее определяют поперечные профили поверхности катания колеса и производят построение на этой базе совокупности продольных профилей колеса. Для оценки эллиптичности и эксцесса колеса используют методы спектрального анализа. Выделяют информационный сигнал, несущий информацию о дефектах на поверхности катания колеса, и выявляют дефекты с привлечением методов кластерного анализа. Технический результат заключается в получении полной информации о наличии, распределении и характере различных дефектов на поверхности катания колеса подвижного состава. 1 з.п. ф-лы, 8 ил.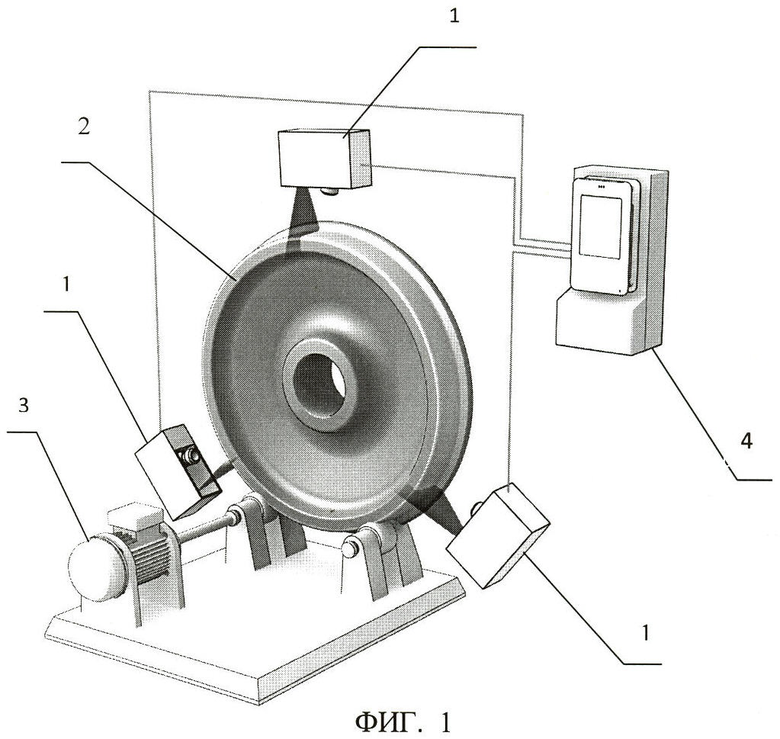
1. Способ обнаружения дефектов на поверхности катания колеса железнодорожного подвижного состава, в котором приводят колесо во вращение, облучают поверхность катания световыми лучами, регистрируют отраженное излучение, осуществляют обработку и анализ информационного сигнала о поверхности катания с последующим обнаружением дефектов, отличающийся тем, что используют для облучения поверхности катания излучение, формируемое триангуляционными датчиками; регистрацию отраженного излучения осуществляют посредством регистрации поперечных профилей поверхности катания с последующим построением по ним совокупности продольных профилей колеса и аппроксимации продольных профилей окружностями со средними радиусами Ro; в качестве информационного сигнала используют совокупность сигналов Uo(t), пропорциональных разности (Rt-Ro), где t - время, Rt - радиусы упомянутых окружностей в точках, соответствующих положению поперечных профилей поверхности катания, причем определяют сигналы Uo(t) для каждого продольного профиля; обработку информационных сигналов производят путем вычитания из сигналов Uo(t) постоянной составляющей, соответствующей среднему радиусу Ro, прямого преобразования Фурье сигналов Uo(t) в сигналы F(f), где f - частота, определения эксцесса и эллиптичности колеса как первой и второй гармоник ряда Фурье соответственно, фильтрации сигнала F(f), осуществления обратного преобразования Фурье, представления упомянутых первой и второй гармоник во временной области и их вычитания из сигналов Uo(t) с формированием разностных сигналов, а анализ информационного сигнала осуществляют посредством пороговой обработки разностных сигналов с последующим построением топологической картины поверхности катания путем совместного исследования разностных сигналов, соответствующих совокупности всех продольных сечений, и обнаружения дефектов с использованием методов кластерного анализа.
2. Способ по п.1, отличающийся тем, что используют для облучения поверхности катания излучение, формируемое тремя триангуляционными датчиками, размещенными по окружности колеса.
| СПОСОБ КОНТРОЛЯ ПОВЕРХНОСТИ КАТАНИЯ КОЛЕСА ПРИ ДВИЖЕНИИ РЕЛЬСОВОГО ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2122956C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ПОВЕРХНОСТИ КАТАНИЯ КОЛЕСА ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2280577C1 |
| JP 5126686 A, 21.05.1993. | |||

