Изобретение относится к электроизмерительной технике. Цель изобретения - повышение точности измерения.
Известны способы интегрирующего преобразования сигналов низкого уровня в разность интервалов времени: патент ФРГ № 2214602, кл. G01R, 19/26, 04.09.75; Орнатский П.П. Автоматические измерения и приборы. Киев: Вища школа, 1973, с.435-437. Данные способы имеют ограниченную точность преобразования за счет влияния напряжения смещения, используемой элементной базы, в частности операционных усилителей. Известно, авторское свидетельство СССР № 1241131, кл. G01IR 19.00, 1986 г. Бюл. № 24. Способ измерения сигналов низкого уровня, основанный на интегрирующем преобразовании сигналов низкого уровня в разность интервалов времени, позволяющий существенно уменьшить влияние напряжения смещения на точность измерения. Тем не менее, данный способ не позволяет полностью исключить влияние напряжения смещения.
Наиболее близким является «Способ измерения сигналов низкого уровня» по авторскому свидетельству СССР № 1241131. В указанном способе повышение точности измерений достигается за счет компенсации аддитивной погрешности. На фиг.1 представлена структурная схема устройства для его осуществления, на фиг.2 представлена временная диаграмма, поясняющая рассматриваемый способ.
Данный способ интегрирующего преобразования сигналов низкого уровня в разность интервалов времени основан на интегрировании входного сигнала в течение заданного интервала времени и последующем интегрировании опорного напряжения до момента равенства нулю накопленного интеграла, запоминании полученного информативного интервала времени, в течение которого осуществлялось интегрирование опорного напряжения, определении суммарного интервала времени, равного длительности заданного и полученного информативного интервалов времени, интегрировании на суммарном интервале времени напряжения смещения и последующем интегрировании опорного напряжения до момента равенства нулю накопленного интеграла и определении результата преобразования как разности между интервалами времени, в течение которых осуществлялось интегрирование опорного напряжения, причем операции интегрирования напряжения смещения и опорного напряжения повторяют многократно на суммарном интервале времени, равном длительности заданного и полученного информативного интервалов времени, а время интегрирования напряжения смещения каждый раз задают меньше оставшейся части суммарного интервала на соответствующее значение, пропорциональное отношению максимального значения напряжения смещения к значению опорного напряжения.
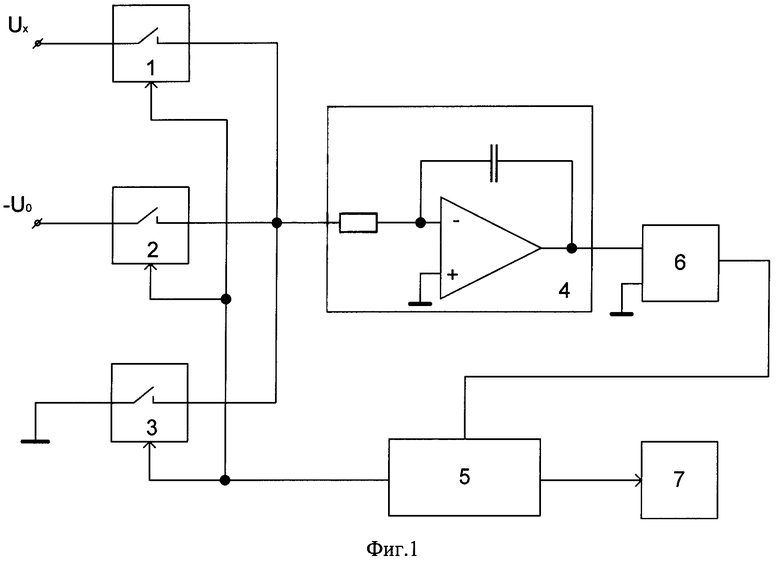
Рассмотрим данный способ на примере устройства, осуществляющего измерение постоянного напряжения. Устройство, показанное на фиг.1, содержит ключи 1, 2 и 3, интегратор 4, блок 5 управление, блок 6 сравнения и измеритель 7 интервалов времени, причем выходы ключей 1, 2 и 3 соединены с входами интегратора 4, а их входы с источниками входного и опорного сигналов и земляной шиной соответственно, выход интегратора 4 соединен с одним входом блока 6 сравнения, второй вход которого подключен к земляной шине, а выход к входу блока 5 управления, выходы последнего соединены с управляющими входами 1, 2 и 3 и входам измерителя 7 интервалов времени.
Рассматриваемый способ осуществляется следующим образом.
В первом такте, в соответствии с фиг.2, за фиксированное время Т1 интегрируют измеряемое напряжение Ux совместно с напряжением смещения e интегратора 4 (ключ 1 замкнут, ключи 2 и 3 - разомкнуты). После этого осуществляют списывание до нуля накопленного интеграла путем интегрирования опорного напряжения U0 (ключ 2 замкнут, ключи 1 и 3 - разомкнуты).Как следует из временной диаграммы (фиг.2) в течение интервала времени [t0,t2]=Т1+Т2=Т процесс описывается выражением

Далее осуществляют поочередное интегрирование напряжения смещения e (ключ 3 замкнут, а ключи 1, 2 - разомкнуты) и опорного напряжения U0 (ключ 2 замкнут, ключи 1, 3 - разомкнуты), причем интервал T2i+1 (i=1, 2, 3,…n) интегрирования смещения e каждый раз задают меньше оставшейся части Тост. суммарного интервала времени
tk-t2=Tl+T2=T на величину k=(emax/U0), где emax - максимальное значение напряжения смещения используемой элементной базы в заданном температурном диапазоне работы устройства. Для i=1 значение
Тост.1=tk-t2=T. В соответствии с этим длительность T3=(1-k)Т, для i=2 длительность T5=(1-k)Tocm.2=(1-k)(Т-Т3-Т4). На фиг.1 показаны только два интервала. Этот процесс продолжается до тех пор, пока оставшийся интервал Tocm.i не станет пренебрежимо малым.
Процесс в течение суммарного интервала времени [t2,tk] описывается соотношением

где n - число интервалов интегрирования напряжения смещения.
Вычитая из выражения (1) выражение (2), получим функцию преобразования

Выражение (3) показывает:
1) что результат преобразования, найденный в виде разности интервалов времени, пропорционален входному напряжению Ux с коэффициентом пропорциональности T1/U0. Поскольку T1 и U0 для данного устройства являются мерой времени и напряжения, то приведенное отношение имеет фиксированное значение;
2) что напряжение смещения е не оказывает влияние на точность измерения напряжения Ux, если точно выполняется равенство tk-t2=T1+T2 и разность tk-t2i, (где t2i - момент окончания последнего информативного интервала времени T2i) равна нулю.
Равенство tk-t2=T1+T2 обеспечивается с точностью до периода квантующих импульсов, с помощью которых формируются интервалы времени Т1 и Т2. Применение кварцевых генераторов частоты позволяет реально снизить эту погрешность до уровня не более 10-6%.
Значение разности tk-t2i связано с количеством n числа повторений операций интегрирования напряжения смещения e на интервале [t2,tk].
Для определения этого числа n можно написать следующие очевидные соотношения. Если условно принять длительность суммарного интервала времени T1+T2 за единицу (T1+T2=T=1), то после первой операции интегрирования напряжения смещения и списывания накопленного интеграла опорным напряжением до нуля, для оставшейся части единичного интервала будет справедливо соотношение Tост.1≤kT, после второй операции - Tост.2≤k2T после третьей операции - Tост.3≤k3T, в общем случае - Tост.n≤knT. Задавая допустимое значение погрешности Δ (погрешности задания суммарного интервала времени) и учитывая, что Т=1, получаем уравнение для достаточного количества числа n операций интегрирования напряжения смещения kn=Δ, откуда n=lgΔ/lgk.
Для определения конкретных значений n выберем тип элементной базы, например, достаточно прецизионные операционные усилители серии INA118, 121, 126, 128, 321, 326 фирмы Texas Instruments. С учетом области назначения способа-прототипа наиболее подходящим будет операционный усилитель INA128 с emax≈100×10-6 В в гарантированном фирмой-изготовителем диапазоне температур.
В этом случае для предела измерения 1B (U0=1B) значение k1=10-4, для предела 10-1 B k2=10-3, для предела 10-2 B k3=10-2, для предела 10-4 B k4=10-1. Для значения погрешности Δ1=10-6 соответственно получим n1≤2, n2=2, n3=3, n4=6. Дальнейшее снижение предела преобразования приведет к существенному росту значения n. Например, для U0=2×10-4 B n≈20. Для значения погрешности Δ2=10-9 получим значения n1≤3, n2=3, n3≤5, n4=9. В соответствии со способом-прототипом погрешность от напряжения смещения должна быть устранена до погрешности используемой меры времени, т.е. до погрешности Δ1 или Δ2. Для определения условий выполнения поставленной цели запишем выражения для интервалов времени T3, T4, T5, T6, T7, T8,…, T2n+1, T2(n+1). Как следует из описания и формулы изобретения, для первой операции интегрирования напряжения смещения Т3=(1-k)Т, Т4=(1-k)kТ; для второй Т5=(1-k)(Т-Т3-Т4)=(1-k)k2Т, Т6=kТ5=(1-k)k3Т; для третьей T7=(1-k)k4Т, T8=(1-k)k5Т; для n-ой

Из последней строчки видно, что для формирования интервалов T2n+1 и T2(n+1) времени необходимо обеспечить задание суммарного интервала времени с погрешностью порядка k2n, в то время как изначально эта погрешность задавалась выражением kn=Δ. Другими словами, погрешность формирования последних интервалов времени интегрирования напряжения смещения должна быть меньше в k2 раз погрешности Δ формирования суммарного интервала времени, какое бы значение последняя погрешность Δ не принимала.
Поясним данный вывод примерами. Возьмем Δ1=10-6, k1=10-4. Для UX=U0=1В (точка максимальной чувствительности). Тогда Т=2Т1 и T3=(1-10-4)2T1, T4=(1-10-4)10-42T1, T5=(1-10-4)10-82T1, Т6=(1-10-4)10-122T1. Из числовых данных видно, что уже интервал Т4 времени необходимо формировать с погрешностью Δ=10-8, а интервал T5 времени с Δ=10-12, а T6 с погрешностью Δ=10-16.
Для Ux=U0=10-2 В при k=10-2 и n=3 получим: T3=(1-10-2)2T1, T4=(1-10-2)10-22T1, T5=(1-10-2)10-42T1, T6=(1-10-2)10-62T1, Т7=(1-10-2)10-82T1, T8=(1-10-2)10-102T1.
Аналогично, интервал Т5 времени должен быть сформирован с предельной погрешностью Δ=10-6, а интервалы Т6, Т7, T8 времени - с погрешностью, существенно меньшей.
Уменьшение предельной погрешности Δ формирования суммарного интервала Т времени приводит к увеличению числа n повторного интегрирования, что также не позволяет достигнуть цели изобретения способа-прототипа.
Кроме указанного недостатка существует еще один, связанный с практической реализацией способа-прототипа. Длительность интервала Т1 времени рассчитывается по двум критериям: во-первых, для подавления сетевой помехи (50 Гц) интервал Т1 времени выбирается кратным 20×10-3 с; во-вторых, его длительность ограничена условием неизменности напряжения смещения e за общее максимальное время 4T1 преобразования. Например, зададим интервал T1 времени, равным 40×10-3 с (стандартное значение), тогда для первого примера T4=(1-10-4)80×10-7 с, Т6=(1-10-4)80×10-15 с, для второго примера T6=(1-10-2)80×10-9 с, Т8=(1-10-2)80×10-13 c. Отсюда следует, что погрешность формирования интервалов времени Δ(T4), Δ(T6) в первом примере должна быть равна: Δ(T4)≤8×10-10 с, Δ(T6)≤8×10-18 с; во втором примере: Δ(T6)≤8×10-10 с, Δ(T8)≤8×10-14 с. Это означает, что операционные усилители должны иметь достаточно большой коэффициент усиления (>1000 для обеспечения погрешности измерения менее 0,1%) в полосе частот до нескольких тысяч гигагерц, а погрешность переключения аналоговых ключей должна соответствовать указанным значениям Δ(T4), Δ(T6), Δ(T8), что превышает существующий уровень характеристик операционных усилителей и ключей приблизительно в 1010 раз.
Таким образом, прототип не позволяет достигнуть точности измерений, определяемой погрешностью, используемой мерой времени.
Задача, на решение которой направлено заявляемое изобретение, заключается в повышении точности интегрирующего преобразования сигналов низкого уровня в разность интервалов времени.
Предлагаемый способ интегрирующего преобразования сигналов низкого уровня в разность интервалов времени основан на интегрировании входного сигнала в течение заданного интервала времени и последующем интегрировании опорного напряжения до момента равенства нулю накопленного интеграла, запоминании полученного информативного интервала времени, в течение которого осуществлялось интегрирование опорного напряжения, определении суммарного интервала времени, равного длительности заданного и полученного информативного интервалов времени, интегрировании на суммарном интервале времени напряжения смещения и последующем интегрировании опорного напряжения до момента равенства нулю накопленного интеграла и определении результата преобразования как разности между интервалами времени, в течение которых осуществлялось интегрирование опорного напряжения, причем операции интегрирования напряжения смещения и опорного напряжения повторяют многократно на суммарном интервале времени, равном длительности заданного и полученного информативного интервалов времени, а время интегрирования напряжения смещения каждый раз задают меньше оставшейся части суммарного интервала на соответствующее значение, для нахождения которого используют отношение максимального значения напряжения смещения к значению опорного напряжения, причем
указанное соответствующее значение определяют по формуле
k - отношение максимального значения напряжения смещения к опорному напряжению;
Δ - заданная погрешность используемой меры времени;
с>1 - основание логарифма.
На фиг.1 представлена структурная схема устройства для его осуществления на примере преобразования постоянного напряжения, на фиг.2 представлена временная диаграмма, поясняющая рассматриваемый способ.
Устройство, показанное на фиг.1, содержит ключи 1, 2 и 3, интегратор 4, блок 5 управление, блок 6 сравнения и измеритель 7 интервалов времени, причем выходы ключей 1, 2 и 3 соединены с входами интегратора 4, а их входы с источниками входного и опорного сигналов и земляной шиной соответственно, выход интегратора 4 соединен с одним входом блока 6 сравнения, второй вход которого подключен к земляной шине, а выход к входу блока 5 управления, выходы последнего соединены с управляющими входами 1, 2 и 3 и входам измерителя 7 интервалов времени.
Рассматриваемый способ осуществляется следующим образом.
В первом такте, в соответствии с фиг.2, за фиксированное время Т1 интегрируют преобразуемое напряжение Ux совместно с напряжением смещения e интегратора 4 (ключ 1 замкнут, ключи 2 и 3 - разомкнуты). После этого осуществляют списывание до нуля накопленного интеграла путем интегрирования опорного напряжения U0 (ключ 2 замкнут, ключи 1 и 3 - разомкнуты). Как следует из временной диаграммы (фиг.2) в течение интервала времени [t0, t2]=Т1+Т2=Т процесс описывается выражением

Далее осуществляют поочередное интегрирование напряжения смещения e (ключ 3 замкнут, а ключи 1, 2 - разомкнуты) и опорного напряжения U0 (ключ 2 замкнут, ключи 1, 3 - разомкнуты), причем интервал T2i+1 (i=1, 2, 3,…,n) интегрирования напряжения смещения e каждый раз задают меньше оставшейся части Тост. суммарного интервала времени tk-t2=T1+T2=T на величину k=(emax/U0), где emax - максимальное значение напряжения смещения для используемой элементной базы в заданном температурном диапазоне работы устройства. Для i=1 значение Tocm.1=tk-t2=T. В соответствии с этим длительность T3=(1-k)Т, для i=2 длительность Т5=(1-k)Tост.2=(1-k)(T-T3-T4). На фиг.1 показаны только два интервала. Этот процесс продолжается до тех пор, пока оставшийся интервал Tост.i не станет пренебрежимо малым.
Процесс в течение суммарного интервала времени [t2,tk] описывается соотношением

где n - число интервалов интегрирования напряжения смещения.
Вычитая из выражения (5) выражение (6), получим функцию преобразования

Выражение (7) показывает:
1) что результат преобразования, найденный в виде разности интервалов времени, пропорционален входному напряжению Ux с коэффициентом пропорциональности. T1/U0 Поскольку T1 и U0 для данного устройства являются мерой времени и напряжения, то приведенное отношение имеет фиксированное значение;
2) что напряжение смещения е не оказывает влияние на точность измерения напряжения Ux, если точно выполняется равенство tk-t2=T1+T2 и разность tk-t2i (где t2i - момент окончания последнего информативного интервала времени T2i) равна нулю.
Равенство tk-t2=T1+T2 обеспечивается с точностью до периода квантующих импульсов, с помощью которых формируются интервалы времени Т1 и Т2. Применение кварцевых генераторов частоты позволяет реально снизить эту погрешность до уровня не более 10-6%.
Значение разности tk-t2i связано с количеством n числа повторений операций интегрирования напряжения смещения e на интервале [t2, tk].
Для определения условий выполнения поставленной цели запишем выражения для интервалов времени T3, T4, T5, T6, T7, T8,…, T2n+1, T2(n+1). Как следует из описания и формулы изобретения:
- для первой операции интегрирования напряжения смещения
T3=(1-k)T, T4=(1-k)kT;
- для второй
T5=(1-k)(T-T3-T4)=(1-k)k2T, T6=kT5=(1-k)k3T;
- для третьей
T7=(1-k)k4T, T8=(1-k)k5T;
- для n-ой

Из последней строчки видно, что для формирования интервалов T2n+1 и T2(n+1) времени необходимо обеспечить задание суммарного интервала времени с погрешностью порядка k2n, в то время как изначально эта погрешность задавалась выражением kn=Δ. Другими словами, погрешность формирования последних интервалов времени интегрирования напряжения смещения должна быть меньше в k2 раз погрешности Δ формирования суммарного интервала времени, какое бы значение последняя погрешность Δ не принимала.
Для достижения указанной цели необходимо доказать, что для любого заданного значения Δ=cГ необходимая точность формирования последнего интервала T2(n+1)= (1-k)(k)2n-1T времени (8) не превышает заданное значение.
Подставим выражение для k в выражение для T2(n+1), получим

Откуда следует, что  Следовательно, при заданных значениях m существуют значения n=m, когда Δ=сГ, что и требовалось доказать.
Следовательно, при заданных значениях m существуют значения n=m, когда Δ=сГ, что и требовалось доказать.
Рассмотрим ряд примеров для Δ=10-6 и k=10-4, т.е. (m=4), k=10-3, т.е. (m=3), k=10-2, т.е. (m=2), k=10-1, т.е. (m=1). Подставив эти значения в выражение для последнего интервала Т2(n+1) времени при n=4 (четырех повторений интегрирования напряжений смещения), n=3, n=2 и n=1, должны получить погрешность формирования интервала на уровне Δ=10-6:
Таким образом, данный способ позволяет осуществлять интегрирующее преобразование сигналов низкого уровня в разность интервалов времени с погрешностью используемой меры времени.
Источники информации
1. Патент ФРГ № 2214602, кл. G01R. 19/26, 04.09.75.
2. Орнатский П.П. Автоматические измерения и приборы. Киев: Вища школа, 1973, с.435-437.
3. Авторское свидетельство СССР № 1241131, кл. G01IR 19.00, 1986 г. Бюл. № 24.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНТЕГРИРУЮЩЕГО АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ НАПРЯЖЕНИЯ | 2011 |
|
RU2457617C1 |
| ПРЕОБРАЗОВАТЕЛЬ АЗИМУТА ДЛЯ ИНКЛИНОМЕТРА | 1990 |
|
RU2018645C1 |
| Интегрирующий аналого-цифровой преобразователь | 1989 |
|
SU1633493A1 |
| СПОСОБ ИНТЕГРИРУЮЩЕГО АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ НАПРЯЖЕНИЯ | 2005 |
|
RU2291559C1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1992 |
|
RU2062549C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАСХОДА В ТРУБОПРОВОДАХ БОЛЬШИХ ДИАМЕТРОВ | 2017 |
|
RU2645834C1 |
| Способ измерения сигналов низкого уровня | 1984 |
|
SU1241131A1 |
| СПОСОБ ДИНАМИЧЕСКОГО ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2127867C1 |
| Широтно-импульсный модулятор | 1989 |
|
SU1644370A1 |
| ПРЕОБРАЗОВАТЕЛЬ С ПОСЛЕДОВАТЕЛЬНЫМ РЕЗОНАНСНЫМ ИНВЕРТОРОМ | 2000 |
|
RU2182397C2 |
Изобретение относится к области электроизмерительной техники, в частности к интегрирующему преобразованию постоянных сигналов низкого уровня в разность интервалов времени. Технический результат - повышение точности измерений, определяемой используемой мерой времени. Способ основан на интегрировании входного сигнала в течение заданного интервала времени и последующем интегрировании опорного напряжения до момента равенства нулю накопленного интеграла, запоминании полученного информативного интервала времени, в течение которого осуществлялось интегрирование опорного напряжения, определении суммарного интервала времени, равного длительности заданного и полученного информативного интервалов времени, интегрировании на суммарном интервале времени напряжения смещения и последующем интегрировании опорного напряжения до момента равенства нулю накопленного интеграла и определении результата преобразования как разности между интервалами времени, в течение которых осуществлялось интегрирование опорного напряжения, причем операции интегрирования напряжения смещения и опорного напряжения повторяют многократно на суммарном интервале времени, равном длительности заданного и полученного информативного интервалов времени, а время интегрирования напряжения смещения каждый раз задают меньше оставшейся части суммарного интервала на соответствующее значение, для нахождения которого используют отношение максимального значения напряжения смещения к значению опорного напряжения, при этом указанное соответствующее значение определяют по формуле

k - отношение максимального значения напряжения смещения к опорному напряжению; Δ - заданная погрешность используемой меры времени; с>1 - основание логарифма. 2 ил.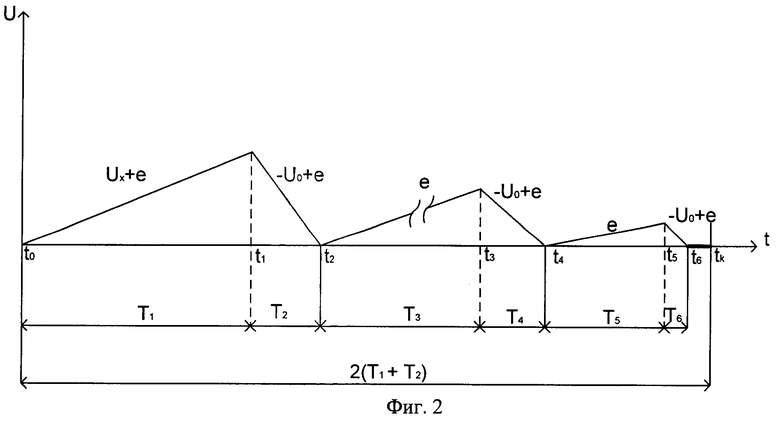
Способ интегрирующего преобразования сигналов низкого уровня в разность интервалов времени основан на интегрировании входного сигнала в течение заданного интервала времени и последующем интегрировании опорного напряжения до момента равенства нулю накопленного интеграла, запоминании полученного информативного интервала времени, в течение которого осуществлялось интегрирование опорного напряжения, определении суммарного интервала времени, равного длительности заданного и полученного информативного интервалов времени, интегрировании на суммарном интервале времени напряжения смещения и последующем интегрировании опорного напряжения до момента равенства нулю накопленного интеграла и определении результата преобразования как разности между интервалами времени, в течение которых осуществлялось интегрирование опорного напряжения, причем операции интегрирования напряжения смещения и опорного напряжения повторяют многократно на суммарном интервале времени, равном длительности заданного и полученного информативного интервалов времени, а время интегрирования напряжения смещения каждый раз задают меньше оставшейся части суммарного интервала на соответствующее значение, для нахождения которого используют отношение максимального значения напряжения смещения к значению опорного напряжения, отличающийся тем, что, с целью повышения точности, указанное соответствующее значение определяют по формуле

где m=logck;
Г=logcΔ;
k - отношение максимального значения напряжения смещения к опорному напряжению;
Δ - заданная погрешность используемой меры времени;
с>1 - основание логарифма.
| Способ измерения сигналов низкого уровня | 1984 |
|
SU1241131A1 |
| Способ измерения уровня электрического сигнала | 1983 |
|
SU1262394A1 |
| Способ измерения напряжения | 1987 |
|
SU1647423A1 |
| Способ извлечения апатита из карбонатных руд | 1981 |
|
SU977042A1 |

