Изобретение относится к радиотехнике, а более конкретно - к проектированию устройств дистанционного управления (ДУ), в частности к поворотным устройствам с дистанционным управлением, и может применяться для автоматического позиционирования (поворота) различных объектов в направлении пользователя с пультом дистанционного управления ПДУ по сигналу с ПДУ. Такими объектами могут быть телевизор, фото- или видеокамера, дисплей при тестировании изображения, информационная панель или измерительный прибор с любым индикатором (например, осциллограф), лицевая сторона которых должна иметь возможность быть повернутой в сторону одного или нескольких наблюдателей (пользователей) с помощью пульта ДУ.
Ручное управление поворотом телевизора в настоящее время реализовано в устройстве под названием "Поворотная подставка для телевизора с дистанционным управлением" (http://www.smarthome.com/87162.html) [1]. Фрагмент описания работы данной "подставки" представлен далее. "Теперь вы можете изменять угловую ориентацию вашего телевизора прямо с дивана с помощью "Поворотной подставки для телевизора с дистанционным управлением"! Вам нужно всего лишь установить данную поворотную подставку с мотором под вашим телевизором, и вы сможете дистанционно поворачивать ваш телевизор на угол до 90 градусов в любую сторону, используя ваш обычный пульт дистанционного управления телевизором. Чтобы запрограммировать управление "подставкой" имеющимся пультом ДУ, просто выберите редко используемую кнопку, не меняющую состояния вашего телевизора (то есть, "Aux", "Таре 1", "CD" и т.п.), "Подставка" запомнит выбранный код и будет поворачиваться в одном направлении, пока вы держите кнопку нажатой. Для изменения направления поворота просто отпустите кнопку и нажмите ее вновь". Таким образом, начало, конец и изменение направления поворота пользователь задает вручную с помощью пульта ДУ. Это требует полного внимания пользователя во время поворота, что может быть не очень удобно (комфортно) для бытовых устройств высокого уровня (например, для домашнего кинотеатра).
В аналоге, описанном в патентной заявке JP №6334944A [2], автоматическое управление поворотом подставки реализовано следующим образом. Инфракрасное (ИК) излучение ПДУ фокусируют линзой на фоторезистивной пластине, которая состоит из двух частей: левой и правой. В случае, если излучение направлено вдоль оси линзы и сфокусировано в центре пластины, обе ее части имеют равное сопротивление и выходные сигналы сбалансированы. Если излучение направлено не вдоль оси, сфокусированное пятно сдвигается влево или вправо, и сигналы будут разбалансированы (левая и правая половины пластины будут иметь разное сопротивление). Разница сигналов, положительная или отрицательная, определит местоположение пульта ДУ, слева или справа от оси линзы.
Как можно предположить, в данном аналоге положение подставки регулируют итерационно, через контур управления поворотом подставки телевизора, и выполняют до момента достижения баланса между сигналами, когда источник ИК излучения (ПДУ) будет находиться на оси линзы. Это означает, что пульт ДУ должен передавать ИК сигнал в течение нескольких секунд, пока не закончится поворот телевизора, что неудобно для аппаратуры высокого уровня (пользователю приходится слишком долго держать кнопку нажатой). Еще один недостаток данного аналога заключается в том, что операция не будет определена, если велико угловое отклонение направления на ПДУ от оси линзы, и излучение не будет сфокусировано ею.
Наиболее близким к заявленному изобретению является устройство автоматического поворота камеры для наведения на оператора с 5 инфракрасным (ИК) ПДУ, выполненное согласно патентам JP №1109872 [3] и JP №1109873 [4], в котором для определения направления на ПДУ предложен ИК детектор, "содержащий три ИК фотодетектора (ФД) с отражателями для формирования трех узких лучей приема сигнала в азимутальной плоскости". Данное устройство выбрано в качестве прототипа предложенного изобретения.
К недостаткам прототипа можно отнести то, что его детектор имеет три ФД и неширокий угловой сектор детектирования и управления ("три узких луча приема сигнала").
Еще один недостаток описанных выше аналогов и прототипа предложенного изобретения (в соответствии с выбранными конкретными применениями) заключается в возможности управления ориентацией только в одной азимутальной плоскости.
Задачей, на решение которой направлено заявляемое изобретение, является создание поворотного устройства с дистанционным управлением с повышенным удобством пользования и расширенными функциональными возможностями.
Технический результат достигнут путем создания поворотного устройства, включающего в себя пульт дистанционного управления (ПДУ), при этом ПДУ выполнен с возможностью формирования и передачи инфракрасного сигнала, и поворотную подставку, содержащую соединенные между собой модуль памяти, выполненный с возможностью сохранения выбранного на ПДУ сигнала в качестве сигнала поворота подставки, детектор углового положения ПДУ, выполненный с возможностью определения величины точного и неточного углового положения ПДУ по его инфракрасному сигналу, модуль определения угла поворота подставки, выполненный с возможностью подачи сигнала о неточном определении углового положения ПДУ в индикатор неточного угла поворота, выполненный с возможностью оповещения пользователя о том, что ПДУ до поворота находился вне зоны точной пеленгации, и о том, что пользователю необходимо повторно послать инфракрасный сигнал с пульта для точного поворота подставки, при этом модуль определения угла поворота подставки также выполнен с возможностью определения угла поворота подставки по величине точного или неточного углового положения пульта дистанционного управления, драйвер мотора выполнен с возможностью формирования сигнала управления, по меньшей мере, одним мотором в соответствии с определенным углом поворота подставки, а, по меньшей мере, один мотор выполнен с возможностью вращения поворотной подставки на угол поворота в соответствии с сигналом управления мотором, причем детектор углового положения ПДУ содержит вычислительный блок, по меньшей мере, два фотодетектора, которые соединены с вычислительным блоком, и, по меньшей мере, две прозрачные рассеивающие пластины, освещаемые потоком излучения инфракрасного сигнала ПДУ и расположенные в разных плоскостях под углом друг к другу, при этом яркость задней, т.е. дальней от ПДУ, поверхности пластины зависит от угла падения потока излучения на пластину, причем каждая пластина размещена перед соответствующим фотодетектором, выполненным с возможностью регистрации яркости задней поверхности пластины и передачи сигнала яркости в вычислительный блок, выполненный с возможностью вычисления углового положения ПДУ на основе сигналов яркости, полученных от фотодетекторов, при этом вычислительный блок выполнен с возможностью вычисления неточного углового положения ПДУ, если поток излучения сигнала пульта дистанционного управления попадает на одну пластину, и вычисления точного углового положения пульта дистанционного управления, если поток излучения сигнала ПДУ попадает, по меньшей мере, на две пластины.
Для функционирования устройства имеет смысл, чтобы оно содержало детектор углового положения ПДУ, выполненный с возможностью определения величины точного и неточного углового положения ПДУ в одной плоскости (азимутальной или угломестной) по его инфракрасному сигналу, модуль определения угла поворота подставки, выполненный с возможностью подачи сигнала о неточном определении углового положения ПДУ в одной плоскости в индикатор неточного угла поворота, выполненный с возможностью оповещения пользователя о том, что поворот подставки выполнен неточно, и о том, что пользователю необходимо повторно послать инфракрасный сигнал с пульта для точного поворота подставки, при этом модуль определения угла поворота подставки также выполнен с возможностью определения угла поворота подставки в одной плоскости по величине точного или неточного измерения углового положения пульта дистанционного управления, драйвер мотора выполнен с возможностью формирования сигнала управления одним мотором в соответствии с определенным углом поворота подставки, а один мотор выполнен с возможностью вращения поворотной подставки в одной плоскости на угол поворота в соответствии с сигналом управления мотором, причем детектор углового положения ПДУ содержит основание, два фотодетектора и две рассеивающие пластины, которые образуют с основанием призму с сечением в форме равнобедренного треугольника с равными углами, прилегающими к основанию, при этом вычислительный блок выполнен с возможностью вычисления углового положения оптического источника в одной плоскости на основе сигналов яркости задних поверхностей пластин, получаемых от двух фотодетекторов, при этом вычислительный блок выполнен с возможностью вычисления неточного углового положения ПДУ, если поток излучения сигнала ПДУ попадает на одну пластину, и вычисления точного углового положения пульта дистанционного управления, если поток излучения сигнала ПДУ попадает на две пластины.
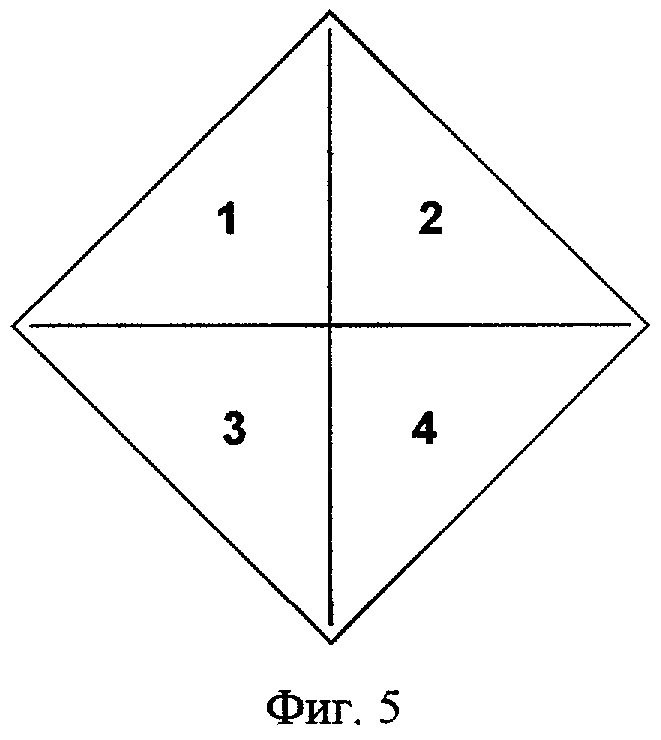
Для функционирования устройства имеет смысл, чтобы оно содержало детектор углового положения ПДУ, выполненный с возможностью определения величины точного и неточного углового положения ПДУ в двух плоскостях (азимутальной и угломестной) по его инфракрасному сигналу, модуль определения угла поворота подставки, выполненный с возможностью подачи сигнала о неточном определении углового положения ПДУ в двух плоскостях в индикатор неточного угла поворота, выполненный с возможностью оповещения пользователя о том, что поворот подставки выполнен неточно, и о том, что пользователю необходимо повторно послать инфракрасный сигнал с пульта для точного поворота подставки, при этом модуль определения угла поворота подставки также выполнен с возможностью определения угла поворота подставки в двух плоскостях по величине точного или неточного измерения углового положения пульта дистанционного управления, драйвер мотора выполнен с возможностью формирования сигналов управления двумя моторами в соответствии с определенными углами поворота подставки, а два мотора выполнены с возможностью вращения поворотной подставки в двух плоскостях на углы поворота в соответствии с сигналами управления моторами, причем детектор углового положения ПДУ содержит основание, четыре фотодетектора и четыре рассеивающие пластины, которые образуют с основанием четырехгранную пирамиду с равными углами, прилегающими к основанию, при этом вычислительный блок выполнен с возможностью вычисления углового положения оптического источника в двух перпендикулярных плоскостях (азимутальной и угломестной) на основе сигналов яркости задних поверхностей пластин, получаемых от четырех фотодетекторов, при этом вычислительный блок выполнен с возможностью вычисления неточного углового положения ПДУ в двух плоскостях, если поток излучения сигнала пульта дистанционного управления не попадает на все четыре пластины, и вычисления точного углового положения ПДУ в двух плоскостях, если поток излучения сигнала ПДУ попадает на четыре пластины.
Для функционирования устройства имеет смысл, чтобы детектор углового положения содержал перегородки, расположенные между парами фотодетектор - рассеивающая пластина и выполненные с возможностью разделения каналов приема излучения.
Для функционирования устройства имеет смысл, чтобы ось детектора углового положения была расположена в середине его сектора обзора по нормали к основанию, при этом вычислительный блок был выполнен с возможностью вычисления углового положения оптического источника от оси детектора на основе пеленгационной характеристики.
Для функционирования устройства имеет смысл, чтобы детектор углового положения содержал вычислительный блок, который выполнен с возможностью вычисления углового положения (угла φ) оптического источника на основе пеленгационной характеристики в плоскости измерения
Р(φ)=(A1-А2)/(A1+А2),
где А1 и А2 - амплитуды сигналов фотодетекторов, а угол φ находится в плоскости измерения, перпендикулярной обеим рассеивающим пластинам.
Для функционирования устройства имеет смысл, чтобы детектор углового положения содержал вычислительный блок, который выполнен с возможностью вычисления азимутального положения (угла φ) и угломестного положения (угла θ) оптического источника на основе соответственно азимутальной пеленгационной характеристики
Р(φ)=(S13-S24)/(S13+S24);
и угломестной пеленгационной характеристики
Р(θ)=(S12-S34)/(S12+S34),
где S13=А1+A3, S24=А2+А4 - суммы амплитуд левой и правой пар сигналов;
S12=A1+А2, S34=A3+А4 - суммы амплитуд верхней и нижней пар сигналов;
А1-А4 - амплитуды сигналов фото детекторов.
Для функционирования устройства имеет смысл, чтобы детектор углового положения содержал рассеивающие пластины, которые выполнены из матового стекла с диффузным рассеиванием проходящего излучения пеленгуемого источника.
Для функционирования устройства имеет смысл, чтобы на поворотной подставке был размещен переключатель режимов работы, соединенный с модулем памяти и выполненный с возможностью переключения режима сохранения выбранного на ПДУ сигнала в качестве сигнала поворота подставки и режима выполнения команды поворота подставки.
Таким образом, поставленная задача решена за счет автоматического позиционирования поворотной подставки в направлении пользователя по сигналу с пульта дистанционного управления в виде однократного нажатия выбранной кнопки на пульте (запрограммированной на поворот подставки) с обеспечением поворота подставки в относительно широких угловых пределах в одной плоскости (двумерный случай, азимутальный контроль) или в двух плоскостях (трехмерный случай, управление по азимуту и углу места).
Для лучшего понимания предложенного изобретения далее приводится его подробное описание с соответствующими чертежами.
Фиг.1. Схема поворотного устройства с дистанционным управлением ("двумерный" вариант) согласно изобретению.
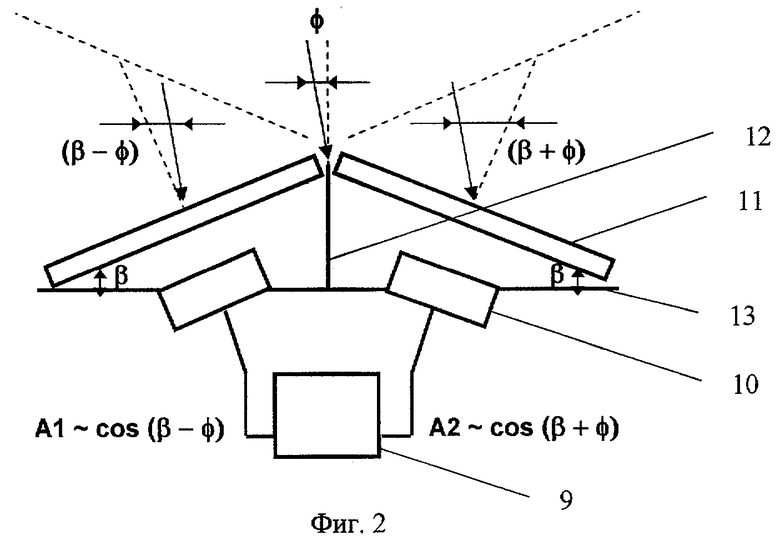
Фиг.2. Схема "двумерного" детектора углового положения пульта дистанционного управления с двумя фотодетекторами и рассеивающими пластинами из матового стекла согласно изобретению. Углы между пластинами и основанием детектора равны ±β.
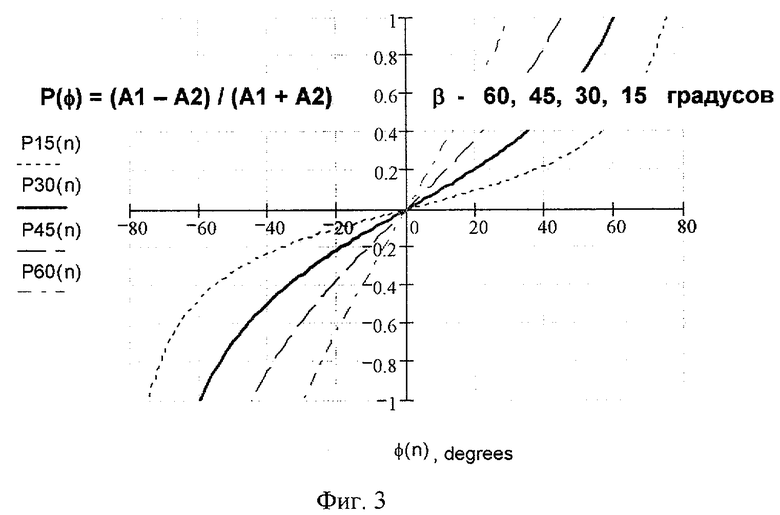
Фиг.3. График пеленгационной характеристики Р(φ) (зависимости Р=DELTA / SIGMA сигнала от измеряемого угла - φ) согласно изобретению.
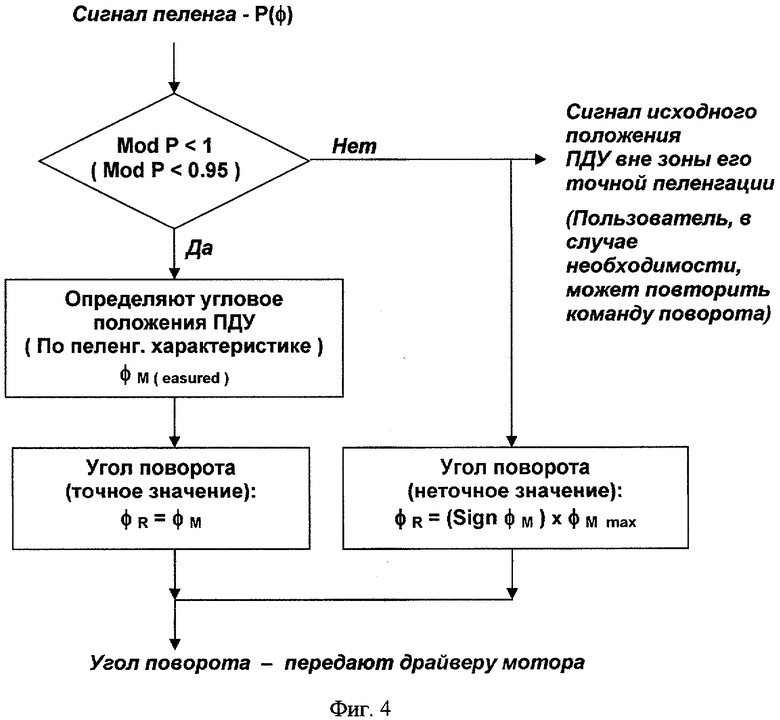
Фиг.4. Схема способа функционирования модуля определения угла поворота подставки в составе поворотного устройства с дистанционным управлением согласно изобретению.
Фиг.5. Схема "трехмерного" детектора углового положения пульта дистанционного управления, четыре наклонные рассеивающие пластины которого образуют четырехгранную пирамиду (вид вдоль оси пирамиды), согласно изобретению.
Рассмотрим двумерный вариант выполнения предложенного поворотного устройства с дистанционным управлением, когда положение устройства управляется только в одной плоскости, например, по азимуту (Фиг.1). Устройство с дистанционным управлением состоит из внешнего пульта 1 дистанционного управления (ПДУ) и поворотной подставки 2. Поворотная подставка 2 содержит детектор 3 углового положения ПДУ, первый выход которого связан с первым входом модуля 4 определения угла поворота подставки, а второй выход с входом модуля 5 памяти, выход которого связан с вторым входом модуля 4 определения угла поворота подставки, первый выход которого связан с драйвером 6 мотора, выход которого связан с мотором 7, при этом второй выход модуля 4 определения угла поворота подставки связан с индикатором 8 неточного угла поворота подставки.
"Двумерный" детектор 3 углового положения ПДУ (Фиг.2) содержит вычислительный блок 9, соединенный с двумя фотодетекторами (ФД) 10, и две прозрачные рассеивающие пластины 11, освещаемые потоком излучения инфракрасного сигнала ПДУ и расположенные в разных плоскостях под углом друг к другу. Яркость задней (дальней от ПДУ) поверхности каждой пластины 11 зависит от угла падения потока излучения на пластину. Каждая пластина 11 размещена перед соответствующим фотодетектором 10. Кроме того, детектор 3 углового положения ПДУ может содержать перегородку 12, расположенную между парами фотодетектор 10 - рассеивающая пластина 11, и основание 13. Выходы фотодетекторов также связаны с модулем 5 памяти, а выход вычислительного блока 9 с входом модуля 4 определения угла поворота подставки. Поворотная подставка 2 может дополнительно содержать переключатель режимов работы устройства, соединенный с модулем 5 памяти.
Основными элементами детектора 3 являются две прозрачные пластины 11, диффузно рассеивающие излучение ПДУ 1 ("матовые стекла"). Прозрачность и рассеивающие свойства должны обеспечиваться в диапазоне длин волн инфракрасного источника ПДУ 1.
Яркость задней поверхности каждой пластины 11 зависит от угла падения излучения на ее поверхность (угла между нормалью к пластине 11 и направлением потока излучения от ПДУ 1) согласно функции косинуса, поскольку эта функция определяет сечение потока излучения, который падает на пластину 11. Затем каждый фотодетектор (ФД) 10, расположенный за пластиной, генерирует сигнал, пропорциональный яркости задней поверхности пластины 11 и передает его в вычислительный блок 9.
ФД 10 чувствительны к инфракрасному (ИК) излучению с максимальной чувствительностью для длины волны около 950 нм (длина волны излучения ПДУ). Таким образом, применяют оптическую фильтрацию для выделения нужной области спектра.
Два сигнала детектора 3 с выходов ФД 10 обрабатывают в вычислительном блоке 9, при этом вычисляют так называемую "Пеленгационную характеристику", то есть зависимость некоторой функции принимаемых сигналов от определяемого углового положения.
Предложенное поворотное устройство с дистанционным управлением имеет два режима работы, в одном из которых в устройстве задают выбранный пользователем сигнал ПДУ 1 в качестве сигнала поворота устройства, а в другом определяют угол поворота и поворачивают подставку 2.
Модуль 5 памяти в режиме "задания команды поворота" запоминает принятый от ПДУ 1 сигнал, а в режиме "выполнения команды поворота" сравнивает коды принимаемых сигналов, поступающих от ПДУ, с кодом сохраненного сигнала и в случае их совпадения выдает сигнал "разрешения поворота" в модуль 4 определения угла поворота.
Рассмотрим способ функционирования предложенного поворотного устройства с дистанционным управлением. Способ включает в себя два основных режима: режим задания выбранного сигнала пульта ДУ в качестве сигнала поворота устройства; режим «выполнение команды поворота» устройства.
В режиме задания команды поворота выбранный пользователем сигнал пульта ДУ принимают посредством фотодетекторов 11 и сохраняют в модуле 5 памяти для последующего использования в "режиме выполнения команды поворота".
В режиме "выполнения команды поворота" распознают посредством модуля 5 сигнал поворота подставки, посланный ПДУ 1, и затем выполняют следующую последовательность операций. Принимают сигналы фотодетекторов 11, определяют их амплитуды А1 и А2 в двух оптических каналах посредством вычислительного блока 9 (данная часть процесса обработки не может быть осуществлена посредством микросхем стандартного ИК приемника с интегрированными усилителем, согласованным фильтром и демодулятором, поскольку они имеют TTL совместимые выходные сигналы "с логическими уровнями" без данных об амплитуде) и вычисляют сигнал пеленга Р(φ)=(A1-А2)/(A1+А2) посредством вычислительного блока. Определяют угол поворота подставки 2 устройства в модуле 4 определения угла поворота подставки. Формируют сигнала управления мотором 7 посредством драйвера 6 мотора. Поворачивают подставку 2 в одной плоскости посредством мотора 7.
Более подробно операции по "определению угла поворота" показаны на Фиг.4. Анализируют в модуле 4 определения угла поворота "сигнал пеленга", при этом определяют, равно ли его абсолютное значение своему пределу, то есть единице, или нет (равенство проверяется с учетом ошибок измерения).
Если "сигнал пеленга" не равен предельному значению (при этом освещаются обе пластины сенсора), то определяют точное угловое положение ПДУ - φМ (точное измерение угла φМ с использованием "пеленгационной характеристики") в вычислительном блоке 9 детектора 3 углового положения ПДУ, после чего угол поворота φR определяют равным измеренному углу φМ в модуле 4 определения угла поворота. Затем за счет работы драйвера 6 и мотора 7 поворачивают подставку на угол φМ в направлении ПДУ.
Если "сигнал пеленга" пределен (при этом освещена только одна пластина 11 сенсора), то угловое положение ПДУ не может быть определено точно и величину угла поворота φR принимают равной максимальному значению точно измеряемого углового положения ПДУ φМ max, а его знак - знаку "сигнала пеленга", то есть
φR=(Sign φМ)х φМ max,
где φМ max=90°-β, β - угол между каждой из освещаемых пластин 11 и основанием 13 детектора 3 (Фиг.3).
Информацию для пользователя (оператора ПДУ 1) о том, что начальное положение ПДУ 1 определено неточно и ПДУ 1 до поворота находился вне зоны точного измерения, отображают посредством индикатора 8 неточного угла поворота (расположенного на поворотной подставке 2). Включение индикатора 8 означает, что после отправки данного "сигнала поворота" с ПДУ 1 поворотная подставка 2 не будет ориентирована точно в направлении пользователя и может потребоваться (после оценки пользователем положения подставки 2) посылка второго "сигнала поворота ". Угловая ошибка в этом случае (когда начальное положение ПДУ 1 находится вне зоны измерения), после первого поворота подставки, будет максимальной, если φ=90° или φ=-90° (когда излучение ПДУ 1 падает на детектор 3 в направлении, параллельном его основанию 13). При таком положении ПДУ 1 первый автоматический поворот подставки 2 (неточный) гарантирует попадание ПДУ 1 в сектор измерения (для выполнения точного позиционирования подставки 2 после посылки второго "сигнала поворота"), если φМ max>β, то есть если β<45° (так как φМ max=90°-β).
Приведенное выше описание предложенного устройства и способа его функционирования соответствует двумерному (2D) случаю, когда поворот подставки 2 осуществляют в одной плоскости (например, азимутальной).
Может быть применен также "трехмерный" (3D) оптический датчик углового положения, показанный на Фиг.5, с двухмоторной подставкой для устройства (с поворотом вокруг двух осей), если положение подставки 2 (для позиционирования телевизора, дисплея, камеры и т.д.) должно изменяться как в азимутальной, так и в угломестной плоскостях.
Предложенное поворотное устройство с дистанционным управлением автоматически определяет местоположение пульта дистанционного управления (ПДУ) и затем поворачивает подставку под позиционируемым устройством для ориентации его в направлении ПДУ и пользователя, подавшего команду с ПДУ. Управление может осуществляться в одной (азимутальной или угломестной) плоскости или в двух, азимутальной и угломестной плоскостях. Предложенное поворотное устройство может использоваться не только для поворота наблюдаемого объекта в сторону зрителя (наблюдателя), но также для поворота аудио- (звуковой) системы в сторону слушателя. Возможны и другие применения.
Хотя указанный выше вариант выполнения изобретения был изложен с целью иллюстрации настоящего изобретения, специалистам ясно, что возможны разные модификации, добавления и замены, не выходящие из объема и смысла настоящего изобретения, раскрытого в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕТЕКТОР УГЛОВОГО ПОЛОЖЕНИЯ ОПТИЧЕСКОГО ИСТОЧНИКА | 2008 |
|
RU2399063C1 |
| СПОСОБ ПЕРЕДАЧИ СООБЩЕНИЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2422919C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УГЛОВОЙ КОЛОРИМЕТРИИ | 2007 |
|
RU2427821C2 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| РАДИОУПРАВЛЯЕМАЯ МОДЕЛЬ ДИРИЖАБЛЯ | 2003 |
|
RU2261749C2 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ ДЛЯ ПОИСКА И МАРКИРОВКИ ВЗРЫВООПАСНЫХ ПРЕДМЕТОВ | 2024 |
|
RU2822025C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПРАВКИ САМОЛЕТА ТОПЛИВОМ В ПОЛЕТЕ | 1997 |
|
RU2111154C1 |
| УСТРОЙСТВО ВИЗУАЛЬНОГО КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И СКОРОСТИ ЗАПРАВЛЯЕМОГО САМОЛЕТА ПРИ ДОЗАПРАВКЕ ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2099253C1 |
| Пульт дистанционного управления | 2022 |
|
RU2787130C1 |
Изобретение относится к системам управления. Техническим результатом является расширение функциональных возможностей поворотного устройства с дистанционным управлением. Результат достигается тем, что поворотное устройство включает в себя пульт дистанционного управления (ПДУ), при этом ПДУ выполнен с возможностью формирования и передачи инфракрасного сигнала, и поворотную подставку, содержащую соединенные между собой модуль памяти, выполненный с возможностью сохранения выбранного на ПДУ сигнала в качестве сигнала поворота подставки, детектор углового положения ПДУ, выполненный с возможностью определения величины точного и неточного углового положения ПДУ по его инфракрасному сигналу, модуль определения угла поворота подставки, выполненный с возможностью подачи сигнала о неточном определении углового положения ПДУ в индикатор неточного угла поворота, выполненный с возможностью оповещения пользователя о том, что ПДУ до поворота находился вне зоны точной пеленгации, и о том, что пользователю необходимо повторно послать инфракрасный сигнал с пульта для точного поворота подставки, при этом модуль определения угла поворота подставки также выполнен с возможностью определения угла поворота подставки по величине точного или неточного углового положения пульта дистанционного управления, драйвер мотора выполнен с возможностью формирования сигнала управления, по меньшей мере, одним мотором в соответствии с определенным углом поворота подставки, а, по меньшей мере, один мотор выполнен с возможностью вращения поворотной подставки на угол поворота в соответствии с сигналом управления мотором, причем детектор углового положения ПДУ содержит вычислительный блок, по меньшей мере, два фотодетектора, которые соединены с вычислительным блоком, и, по меньшей мере, две прозрачные рассеивающие пластины, освещаемые потоком излучения инфракрасного сигнала ПДУ и расположенные в разных плоскостях под углом друг к другу, при этом яркость задней, т.е. дальней от ПДУ, поверхности пластины зависит от угла падения потока излучения на пластину, причем каждая пластина размещена перед соответствующим фотодетектором, выполненным с возможностью регистрации яркости задней поверхности пластины и передачи сигнала яркости в вычислительный блок, выполненный с возможностью вычисления углового положения ПДУ на основе сигналов яркости, полученных от фотодетекторов, при этом вычислительный блок выполнен с возможностью вычисления неточного углового положения ПДУ, если поток излучения сигнала пульта дистанционного управления попадает на одну пластину, и вычисления точного углового положения пульта дистанционного управления, если поток излучения сигнала ПДУ попадает, по меньшей мере, на две пластины. 8 з.п. ф-лы, 5 ил.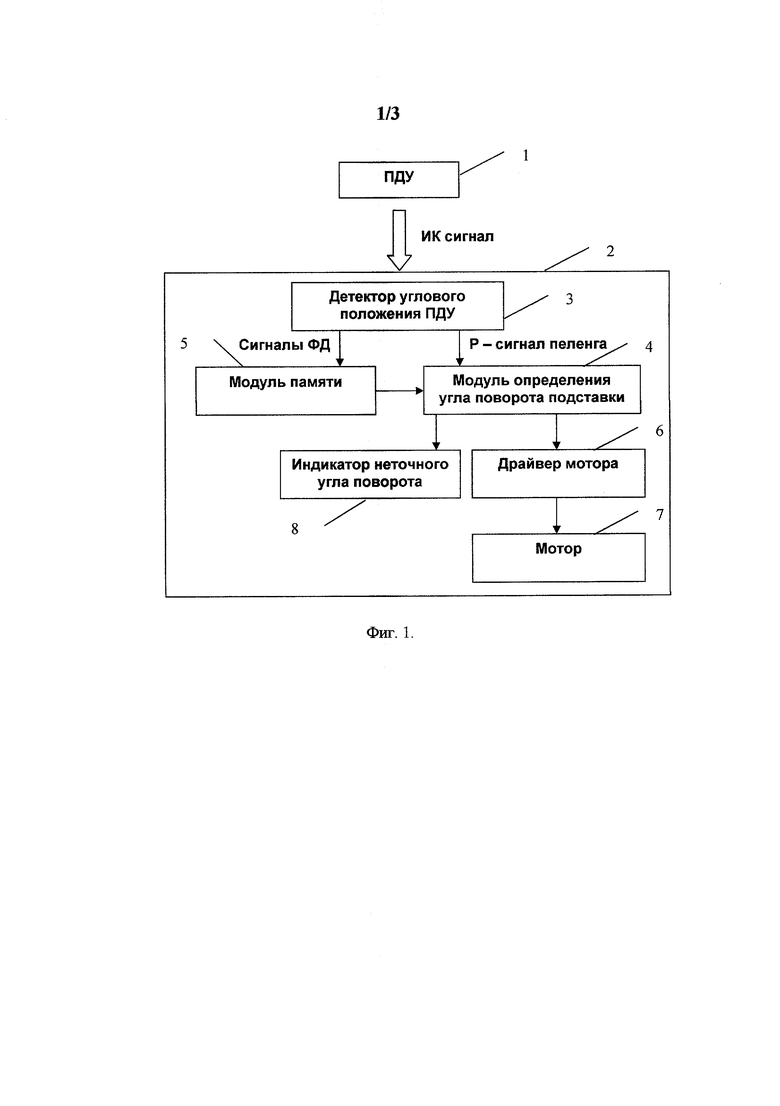
1. Поворотное устройство, включающее в себя пульт дистанционного управления (ПДУ), при этом ПДУ выполнен с возможностью формирования и передачи инфракрасного сигнала, и поворотную подставку, содержащую соединенные между собой модуль памяти, выполненный с возможностью сохранения выбранного на ПДУ сигнала в качестве сигнала поворота подставки, детектор углового положения ПДУ, выполненный с возможностью определения величины точного и неточного углового положения ПДУ по его инфракрасному сигналу, модуль определения угла поворота подставки, выполненный с возможностью подачи сигнала о неточном определении углового положения ПДУ в индикатор неточного угла поворота, выполненный с возможностью оповещения пользователя о том, что ПДУ до поворота находился вне зоны точной пеленгации, и о том, что пользователю необходимо повторно послать инфракрасный сигнал с пульта для точного поворота подставки, при этом модуль определения угла поворота подставки также выполнен с возможностью определения угла поворота подставки по величине точного или неточного углового положения пульта дистанционного управления, драйвер мотора выполнен с возможностью формирования сигнала управления, по меньшей мере, одним мотором в соответствии с определенным углом поворота подставки, а, по меньшей мере, один мотор выполнен с возможностью вращения поворотной подставки на угол поворота в соответствии с сигналом управления мотором, причем детектор углового положения ПДУ содержит вычислительный блок, по меньшей мере, два фотодетектора, которые соединены с вычислительным блоком, и, по меньшей мере, две прозрачные рассеивающие пластины, освещаемые потоком излучения инфракрасного сигнала ПДУ и расположенные в разных плоскостях под углом друг к другу, при этом яркость задней, т.е. дальней от ПДУ, поверхности пластины зависит от угла падения потока излучения на пластину, причем каждая пластина размещена перед соответствующим фотодетектором, выполненным с возможностью регистрации яркости задней поверхности пластины и передачи сигнала яркости в вычислительный блок, выполненный с возможностью вычисления углового положения ПДУ на основе сигналов яркости, полученных от фотодетекторов, при этом вычислительный блок выполнен с возможностью вычисления неточного углового положения ПДУ, если поток излучения сигнала пульта дистанционного управления попадает на одну пластину, и вычисления точного углового положения пульта дистанционного управления, если поток излучения сигнала ПДУ попадает, по меньшей мере, на две пластины.
2. Поворотное устройство по п.1, отличающееся тем, что включает в себя детектор углового положения ПДУ, выполненный с возможностью определения величины точного и неточного углового положения ПДУ в одной плоскости по его инфракрасному сигналу, модуль определения угла поворота подставки, выполненный с возможностью подачи сигнала о неточном определении углового положения ПДУ в одной плоскости в индикатор неточного угла поворота, выполненный с возможностью оповещения пользователя о том, что поворот подставки выполнен неточно и о том, что пользователю необходимо повторно послать инфракрасный сигнал с пульта для точного поворота подставки, при этом модуль определения угла поворота подставки также выполнен с возможностью определения угла поворота подставки в одной плоскости по величине точного или неточного измерения углового положения пульта дистанционного управления, драйвер мотора выполнен с возможностью формирования сигнала управления одним мотором в соответствии с определенным углом поворота подставки, а один мотор выполнен с возможностью вращения поворотной подставки в одной плоскости на угол поворота в соответствии с сигналом управления мотором, причем детектор углового положения ПДУ содержит основание, два фотодетектора и две рассеивающие пластины, которые образуют с основанием призму с сечением в форме равнобедренного треугольника с равными углами, прилегающими к основанию, при этом вычислительный блок выполнен с возможностью вычисления углового положения оптического источника в одной плоскости на основе сигналов яркости дальних от ПДУ поверхностей пластин, получаемых от двух фотодетекторов, при этом вычислительный блок выполнен с возможностью вычисления неточного углового положения ПДУ, если поток излучения сигнала ПДУ попадает на одну пластину, и вычисления точного углового положения пульта дистанционного управления, если поток излучения сигнала ПДУ попадает на две пластины.
3. Поворотное устройство по п.1, отличающееся тем, что содержит детектор углового положения ПДУ, выполненный с возможностью определения величины точного и неточного углового положения ПДУ в двух плоскостях по его инфракрасному сигналу, модуль определения угла поворота подставки, выполненный с возможностью подачи сигнала о неточном определении углового положения ПДУ в двух плоскостях в индикатор неточного угла поворота, выполненный с возможностью оповещения пользователя о том, что поворот подставки выполнен неточно и о том, что пользователю необходимо повторно послать инфракрасный сигнал с пульта для точного поворота подставки, при этом модуль определения угла поворота подставки также выполнен с возможностью определения угла поворота подставки в двух плоскостях по величине точного или неточного измерения углового положения пульта дистанционного управления, драйвер мотора выполнен с возможностью формирования сигналов управления двумя моторами в соответствии с определенными углами поворота подставки, а два мотора выполнены с возможностью вращения поворотной подставки в двух плоскостях на углы поворота в соответствии с сигналами управления моторами, причем детектор углового положения ПДУ содержит основание, четыре фотодетектора и четыре рассеивающие пластины, которые образуют с основанием четырехгранную пирамиду с равными углами, прилегающими к основанию, при этом вычислительный блок выполнен с возможностью вычисления углового положения оптического источника в двух перпендикулярных плоскостях на основе сигналов яркости дальних от ПДУ поверхностей пластин, получаемых от четырех фотодетекторов, при этом вычислительный блок выполнен с возможностью вычисления неточного углового положения ПДУ в двух плоскостях, если поток излучения сигнала пульта дистанционного управления не попадает на все четыре пластины, и вычисления точного углового положения ПДУ в двух плоскостях, если поток излучения сигнала ПДУ попадает на четыре пластины.
4. Поворотное устройство по любому из пп.1-3, отличающееся тем, что детектор углового положения содержит перегородки, расположенные между парами фотодетектор - рассеивающая пластина и выполненные с возможностью разделения каналов приема излучения.
5. Поворотное устройство по любому из пп.1-3, отличающееся тем, что детектор углового положения содержит рассеивающие пластины, которые выполнены из матового стекла с диффузным рассеиванием проходящего излучения пеленгуемого источника.
6. Поворотное устройство по любому из пп.1-3, отличающееся тем, что на поворотной подставке размещен переключатель режимов работы, соединенный с модулем памяти и выполненный с возможностью переключения режима сохранения выбранного на ПДУ сигнала в качестве сигнала поворота подставки и режима выполнения команды поворота подставки.
7. Поворотное устройство по любому из пп.1-3, отличающееся тем, что ось детектора углового положения расположена в середине его сектора обзора по нормали к основанию, при этом вычислительный блок выполнен с возможностью вычисления углового положения оптического источника от оси детектора на основе пеленгационной характеристики.
8. Поворотное устройство с дистанционным управлением по п.7, отличающееся тем, что детектор углового положения содержит вычислительный блок, который выполнен с возможностью вычисления углового положения (угла φ) оптического источника на основе пеленгационной характеристики в плоскости измерения
Р(φ)=(А1-А2)/(А1+А2),
где А1 и А2 - амплитуды сигналов фотодетекторов, а угол φ находится в плоскости измерения, перпендикулярной обеим рассеивающим пластинам.
9. Поворотное устройство с дистанционным управлением по п.7, отличающееся тем, что детектор углового положения содержит вычислительный блок, который выполнен с возможностью вычисления азимутального положения (угла φ) и угломестного положения (угла θ) оптического источника на основе соответственно азимутальной пеленгационной характеристики
P(φ)=(S13-S24)/(S13+S24);
и угломестной пеленгационной характеристики
P(θ)=(S12-S34)/(S12+S34),
где S13=A1+A3, S24=A2+A4 - суммы амплитуд левой и правой пар сигналов;
S12=A1+A2, S34=A3+A4 - суммы амплитуд верхней и нижней пар сигналов;
А1-А4 - амплитуды сигналов фотодетекторов.
| JP 6334944 A, 02.12.1994 | |||
| ОПТОЭЛЕКТРОННЫЙ ДАТЧИК УГЛА | 2004 |
|
RU2320960C2 |
| Устройство для цифрового фазового детектирования импульсных последовательностей на неравных частотах | 1981 |
|
SU1109872A1 |
| УСТРОЙСТВО ПОВЫШЕНИЯ ДАВЛЕНИЯ | 2017 |
|
RU2731871C1 |
| РАЗВЕРТЫВАЕМЫЙ КРУПНОГАБАРИТНЫЙ КОСМИЧЕСКИЙ РЕФЛЕКТОР | 2004 |
|
RU2262784C1 |
| JP 9051585 A, 18.02.1997. | |||

