1. Область техники, к которой относится изобретение.
Изобретение относится к средствам передвижения индивидуального пользования, приводимого в движение мускульной силой человека. Главное его назначение - ускорение и облегчение ходьбы человека на твердых грунтах. Еще оно может быть использовано в качестве спортивного снаряда или инвентаря, средства для игр и средства помощи людям с ограничениями в опорно-двигательном аппарате.
Устройство в использовании значительно проще велосипеда и роликовых коньков, т.к. использует привычные шаговые движения при ходьбе, упрощаемые благодаря применению техники качения. Поэтому оно названо шагокатом.
2. Уровень техники.
Известно устройство для облегчения ходьбы и переноски грузов, запатентованное изобретателем А.Г.Жуковым [1]. Оно относится к медицинской технике и к средствам разгрузки опорно-двигательного аппарата, выполняющим функцию за счет переноса тяжести человека и, возможно, взятого им груза на механическую конструкцию, в которой человек размещается. Конструкция в какой-то степени дублирует опорно-двигательный аппарат человека, имеет твердый жилет с седлом, подголовником и подмышечными упорами, через которые человек свой вес частично "вешает" на устройство. Его шарниры располагаются против суставов человека, а линейные ее части закрепляются на ступнях, голенях, бедрах, плечах и предплечьях. Таким образом, разгружается скелет человека.
Предлагаемое устройство не нацелено на разгрузку скелета человека, его задача - снизить нагрузку на мышцы и ускорить его ход за счет замены способа движения между точками опор под ногами. Устройство заменяет каждый шаг, т.е. короткие пологие падение и подъем с одной опорной ноги на другую перекатыванием между ними.
3. Раскрытие изобретения.
3.1. Идея устройства.
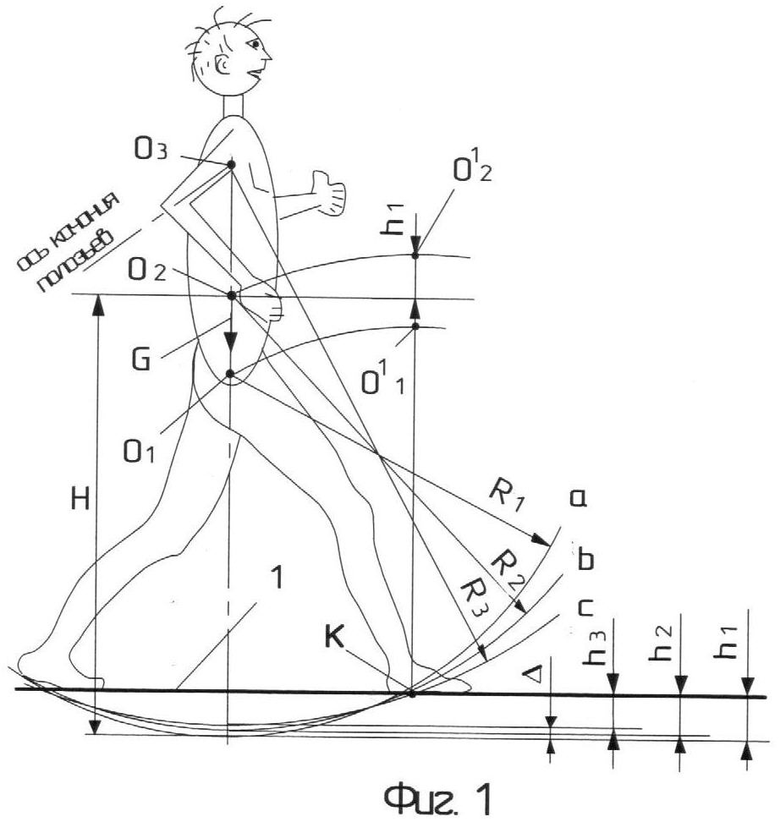
Рассмотрим схему движения человека при ходьбе. Тазобедренный сустав (как шарнир), обеспечивающий угловые движения ног и обуславливающие шаги, расположен в точке O1 (Фиг.1). При повороте ноги длиной R1 вокруг точки O1 опорная точка на стопе К очерчивает дугу радиуса R1, опускающуюся ниже линии грунта 1 на глубину h1, что соответствует позиции пешехода с расставленными ногами и, следовательно, низшему положению его центра тяжести (ЦТ) O2. Назовем эту величину высотой шага h, так как при выходе пешехода в вертикальное положение тазобедренный сустав правой ноги пешехода O1 поднимется в позицию O1 1. При этом его ЦТ поднимется на высоту h1=h. Если шаг будет совершен с места, то формально от пешехода это потребует выполнения работы G·h1.
Движение "сходу" несколько убавит требуемый расход энергии, но не устранит совсем. Это сразу становится заметным, когда пешеход идет с грузом. Тогда обычно нагруженный человек стремится совершать маленькие шаги, имеющие меньшую высоту. К этому же стремится и слабый человек (больной, пожилой или тучный). Это позволяет пешеходу с длиной ноги R уменьшить глубину опускания ЦТ до h, для чего надо уменьшить шаг до длины [2]:

В случае, если длина шага L уже задана, то глубина просадки ЦТ человека составит:

Другой способ снижения энергозатрат на ходьбу подсказывает нам опыт ступания на конец короткой досочки, переложенной через палку, рельсу и т.п., и последующим шаганием на ее противоположный конец. Вы переваливаетесь на него, чувствуя радостное ощущение легкости, после чего хочется повторить такой шаг снова и снова.
Еще более яркое ощущение проявляется, когда эта досочка от бочки и обращена вогнутой стороной к Вам, тогда при шаге с одного ее конца на другой Вы уже не перевалитесь с ноги на ногу, а мягко перекатитесь, получив удовольствие. Описываемое устройство выполняет задачу облегчения и ускорения Вашего пешего движения по принципу упомянутых досочек, заменяя традиционный формат шагания "спад-подъем-перенос" на другой облегченный формат "перекат-перенос". Здесь термин "перекат" означает перекат пешехода с одной ноги на другую, а "перенос" означает перевод ноги из заднего в переднее положение. Это устройство, обеспечивающее такой характер пешего движения, названо "шагокат".
Шагокат (Фиг.2) располагается на грунте 1 и состоит из двух полозьев, прогнутых своими сферическими подошвами к поверхности грунта в любом сечении по дуге радиуса R. Это означает, что их подошвы являются частями некой воображаемой сферы с радиусом R. Правый 2 и левый 5 полозья жестко связаны между собой кареткой 6 (Фиг.3), которая удерживает их неизменно прилегающими подошвами к указанной сфере независимо от взаимного положения. При этом каретка способна скользить (Фиг.4) внутри полозьев с помощью шаровых роликов 9 и 10 по внутренним каналам, параллельным плоскости симметрии, разделяющей полозья по дуге большого круга воображаемой сферы.
Из-за пары (Фиг.4, 5, 6) одинаковых конических шестерен 8, сцепленных с рейками 7 (дугообразные с конической нарезкой), вмонтированными в бортики 11 полозьев, каретка 6 может скользить по полозьям 2 и 5 только в противоположные стороны. Это означает, что сами полозья 2 и 5 тоже могут двигаться относительно нее и относительно друг друга в обе, но разные стороны. Каретка 6 проникает в полость полозьев (Фиг.2) через щели 4 и позволяет перемещаться им относительно друг друга возвратно-поступательно, надежно удерживает их подошвами в поверхности воображаемой сферы.
Пешеход, стоя на полозьях, надетых на ноги с помощью креплений 3, может перекатываться с одной ноги на другую между точками контакта К1 и К2 по прямому следу (линии), соединяющему на поверхности грунта их проекции подобно тому, как он мог делать на прогнутой бочковой досочке. Этот след пересекает в точке К другой прямой след от пересечения поверхности грунта плоскостью симметрии. В ней шагокат может находиться долгое время, пока пешеход не захочет перенести свой ЦТ в ту или иную сторону. Однако это замечание справедливо лишь в том случае, если (Фиг.1, 2) радиус подошв шагоката R1=R3, т.е. больше R1 и R2, т.е. длины его ног (R1) и высоты ЦТ пешехода (R2) на 10-30%. Здесь R3 - желаемый радиус подошв шагоката (R3 больше Н), а Н - высота ЦТ пешехода над грунтом, т.е. расстояние от ЦТ до подошв шагоката.
Это необходимое условие, так как при R=R1 пешеход на шагокате - абсолютно неустойчивая система: сила тяжести перевернет пешехода через точку O1 вместе с шагокатом, и он просто упадет. В случае R=R1 ситуация принципиально не меняется, система осталась неустойчивой: любой возмущающий фактор может опрокинуть систему, и конец будет таким же. Обеспечить устойчивость и управляемость системе "пешеход-шагокат" может лишь сферичность подошв шагоката радиуса R>H запасом 10-30%, т.е. R=R3. Центр указанной сферы О3 с реальной ее частью в виде подошв шагоката должен приходиться на верхнюю часть туловища пешехода, а при ношении тяжестей на спине, плечах или голове его можно сместить даже на голову пешехода, естественно, подбором другого экземпляра шагоката.
Следует отметить, что для увеличения радиуса катания (сферы) R с R1 на R3 (Фиг.1), обеспечившего устойчивость системе "пешеход-шагокат", пришлось пожертвовать степенью компенсации глубины опускания, ЦТ была равна h1, т.е. абсолютной. При R=R3 компенсация (Фиг.3) уменьшилась до h3. Это означает, что при пользовании шагокатом остается небольшая просадка ЦТ размером:

Это (Фиг.1) примерно 10-20% от нулевого уровня, т.е. приемлемой платой за устойчивость.
3.2. Маневрирование на шагокате.
Если не применять никаких действий кроме ходьбы перекатами, то пешеход будет двигаться прямолинейно, хотя след шагоката будет пилообразным (Фиг.7). Высота "пилы" равна В, т.е. развалу шага пешехода, а шаг пилы равен двум шагам пешехода, т.е. 2L (см. прямолинейный участок траектории). Для смены направления движения необходимо во время выноса вперед ноги с полозом повернуть ее в нужном направлении. Тем самым Вы, в зависимости от направления поворота, либо уменьшаете, либо увеличиваете угол отворота предстоящего прямолинейного отрезка следа. Это грубый способ поворота.
На траектории (фиг.7) видно, что при движении вниз мы не предпринимали никаких действий на прямолинейном участке пути, тем самым сохраняли неизменным угол уклона следа в точках а, b, с. В точке d мы его уменьшили, а в точке е увеличили, чем обеспечили первый поворот вправо. Затем в точке f мы его не меняли, а в точках g, i, k, m, т.е. в точках опор правой ногой, мы уменьшали угол раствора следа, а в чередующихся с ними точках h, j, l, т.е. в точках опор левой ногой, наоборот, увеличивали. Тем самым был обеспечен второй поворот траектории движения, но уже влево. Это мягкий способ поворота.
3.3. Варианты технических решений.
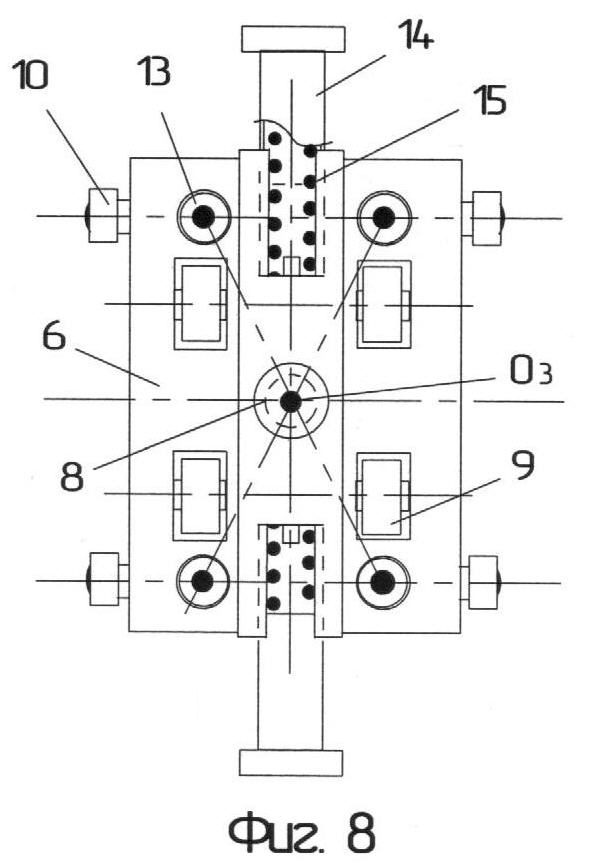
Они относятся к конструкции каретки, полозьям и их соединению (Фиг.8, 9,10). Как и у предыдущего шагоката, полозья на верхних и нижних половинах имеют желоба, в которые входят ролики каретки, и она, удерживая ими полозья шагоката "прижатыми" подошвами к поверхности сферы радиуса R=R3, заставляет их катиться в разные стороны относительно себя благодаря коническим шестерням 8. В данном варианте ролики 9 и 10 не шаровые (Фиг.6), а цилиндрические с осями вращения, параллельными оси качания полозьев О3 (Фиг.1).
Подобные ролики не дают полозьям "ломать" форму сферы, удерживая полозья с помощью желобов 16 и 17. Однако, в отличие от шаровых роликов, они не позволяют полозьям хорошо скользить друг относительно друга по каретке, когда они испытывают нагрузку разрыва и сжатия в тангенциальном направлении.
Чтобы и в этом случае обеспечить нормальное скольжение полозьев относительно друг друга, каретка снабжена (Фиг.8, 9) коническими роликами 13, оси вращения которых сходятся в центре сферы О3 (Фиг.1). Ясно, что боковые стенки желобов на внутренних полостях полозьев представляют собой дуговые полоски конических поверхностей с центром в той же точке О3. С их помощью конические ролики хорошо выдерживают описанные выше нагрузки. Конструкция сложнее, но при тяжелых нагрузках может успешно справиться с задачей.
3.4. Пружинный буфер-аккумулятор кинетической энергии.
При быстрой ходьбе и размашистом шаге раздвижка полозьев может быть столь стремительной, что их придется удерживать особым образом, иначе (Фиг.2) концевые края щелей 4 полозьев могут повредиться сами и повредить каретку. Чтобы этого не произошло, каретка снабжена двумя буферами 14, выполненными в виде пистонов с пружинами, вставленными внутрь цилиндрических гнезд (Фиг.8), расположенных по торцам каретки. Пистон не выпадает из гнезда благодаря присоединению концов пружин к их основаниям. Под действием внешних усилий он может вдавиться внутрь гнезда (Фиг.10), сдерживая встречные усилия полозьев, и выдвигаться оттуда, прилагая усилия к краям 19 щелей 4 полозьев и заставляя их ускоренно раздвигаться, но уже в обратную сторону.
Последнее особенно важно, т.к. возвращает накопленную энергию торможения разогнавшегося полоза в энергию ускорения другого полоза в начале очередного шага. Поэтому этот эффект специально закладывается в конструкцию шагокатов с целью ускорить движение и сэкономить энергию пешехода. С этой целью концевые края щелей снабжаются специальными укрепляющими их упорами 18, 19.
Теперь можно не бояться ударить нечаянно полозья о каретку, но и, наоборот, в необходимых случаях надо делать это и посильнее.
4. Краткое описание чертежей.
Фиг.1. Схема механизма движения, поясняющая энергетические затраты пешехода.
Фиг.2. Шагокат на поверхности грунта в момент перекатывания (вид сбоку).
Фиг.3. Шагокат на поверхности грунта в момент перекатывания (вид спереди).
Фиг.4. Шагокат в разрезе АА (Фиг.2). Видна соединительная каретка с шаровьми ролами.
Фиг.5 и 6. Крепежная катающая каретка (виды сбоку и сверху соответственно).
Фиг.7. Движения шагоката при маневрировании (траектория).
Фиг.8. Каретка высокого шагоката с ускорителем шага и нешаровыми роликами.
Фиг.9. Поперечный разрез высокого шагоката.
Фиг.10. Вид сверху на высокий шагокат со снятыми верхними половинами полозьев.
5. Осуществление изобретения.
Шагокат состоит из трех узлов, причем полозья из-за симметричности одинаковы. Стало быть, необходимо качественно изготовлять каретки и полозья, и производственный процесс будет налажен. Предполагая, что шагокат - изделие массового спроса, необходимая экспериментальная отработка образцов должна быть проведена. Особенно важно подобрать легкие надежные износостойкие материалы и конструкции для полозьев и их подошв.
Источники информации
1. Жуков А.Г. Устройство для облегчения ходьбы и переноски грузов. Патент № 94024324, опубликовано 1996.08.27.
2. Norton Holbrook L. Mathematics ft work. Industrial Press, Inc. 1990. New York, New York.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАЧЕХОД И КАЧЕПРИВОДНОЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2392177C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ ЧЕЛОВЕКА ШАГОВЫМ КАЧЕНИЕМ "МАКСИНИО" | 2005 |
|
RU2299751C2 |
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| СИСТЕМА ОВАЛЬНЫХ КОЛЕС ПОВЫШЕННОЙ ПРОХОДИМОСТИ С ОБЩЕЙ ОСЬЮ ВРАЩЕНИЯ | 2011 |
|
RU2452630C1 |
| Устройство ограничения отклонения космонавта в скафандре от вертикали на поверхности Луны | 2023 |
|
RU2818760C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДОХРАНЕНИЯ ОБУВИ ОТ СКОЛЬЖЕНИЯ (ВАРИАНТЫ) | 2000 |
|
RU2189162C2 |
| СЕКЦИОННОЕ УПРУГОСГИБАЕМОЕ СУДНО, ЕГО КАЧЕПРИВОДНОЙ ДВИЖИТЕЛЬ И СПОСОБ ДОСТАВКИ ГРУЗОВ МОРЕМ С ИСПОЛЬЗОВАНИЕМ ЭНЕРГИИ ВОЛН | 2007 |
|
RU2356783C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОДОШВЫ | 1996 |
|
RU2115352C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОДОШВЫ | 1996 |
|
RU2115353C1 |
| ХОДОВАЯ ПОВЕРХНОСТЬ КАБЛУКА С ПРОТИВОСКОЛЬЗЯЩИМИ СВОЙСТВАМИ | 2014 |
|
RU2580083C1 |







Изобретение относится к средствам индивидуального передвижения, обеспечивает ускорение и облегчение ходьбы человека по ровным поверхностям и может быть использовано в качестве спортивного снаряда, средства для игр и средства восстановления опорно-двигательного аппарата людей, страдающих от его нарушений. Устройство проще велосипеда и роликовых коньков, использует привычные шаговые движения при ходьбе, совмещая их с перекатываниями. Устройство содержит пару полозьев, прогнутых так, что они вписываются подошвами в воображаемую сферу радиуса немногим меньше роста человека и каретку, соединяющую полозья между собой при помощи роликов, расположенных внутри полозьев. 10 ил.
Устройство для ходьбы катанием по поверхности, содержащее пару полозьев, прогнутых так, что они вписываются подошвами в воображаемую сферу радиуса немногим меньше роста человека и каретку, соединяющую полозья между собой при помощи роликов, расположенных внутри полозьев.
| RU 2179875 С2, 27.02.2002 | |||
| RU 94024324 A1, 27.08.1996 | |||
| US 4405139 A, 20.09.1983. |

