Изобретение относится к области организации и управления движением на железных дорогах, а именно к системам прицельного торможения моторвагонного подвижного состава (МВПС), в частности, для высокоточной остановки электропоездов около платформ.
Известно устройство управления прицельным торможением (патент РФ №54348), содержащее управляющий вычислительный комплекс, состоящий из программно-аппаратных модулей, объединенных в одном промышленном компьютере, а модуль расчета скорости выхода отцепов из тормозных позиций выполнен с возможностью расчета скорости выхода отцепов из тормозных позиций с учетом параметров внешней среды в режиме реального времени.
К недостаткам данного устройства можно отнести сложность устройства и невысокую точность прицельной остановки.
Наиболее близким к изобретению является система определения местоположения железнодорожных транспортных средств (патент РФ №2284938), содержащая, по меньшей мере, один идентификатор пути, установленный на трассе прохождения указанного транспортного средства, расположенные на указанном железнодорожном транспортном средстве средство возбуждения сигнала указанного идентификатора пути и средство регистрации сигнала указанного идентификатора пути и бортовое вычислительное средство, выполненное с возможностью анализа указанного отклика.
Недостатком данного устройства является сложность устройства и невозможность обеспечить прицельной остановки.
Техническая задача, решаемая посредством предлагаемой системы, состоит в обеспечении точного (прицельного) торможения электропоездов.
Технический результат, получаемый при реализации предложенной системы, состоит в повышении точности торможения железнодорожных транспортных средств.
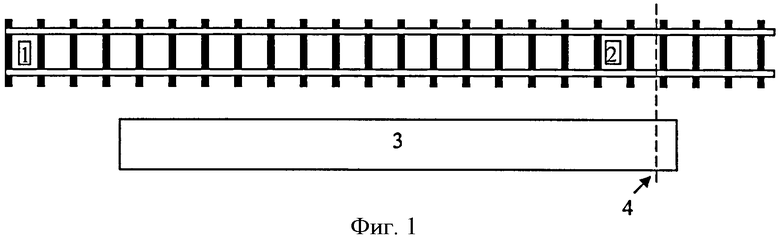
На фиг.1 показан пример расположения радиочастотных меток около платформы.
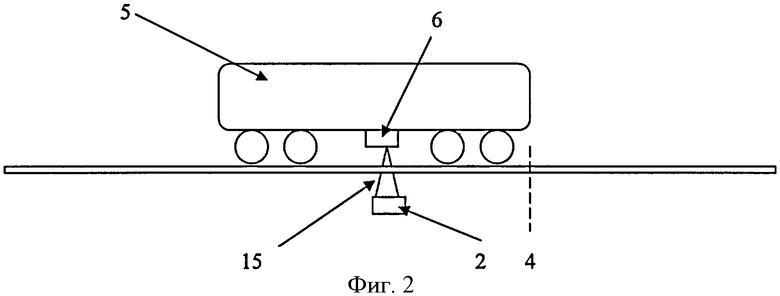
На фиг.2 показан пример расположения радиочастотного считывателя на железнодорожном транспортном средстве.
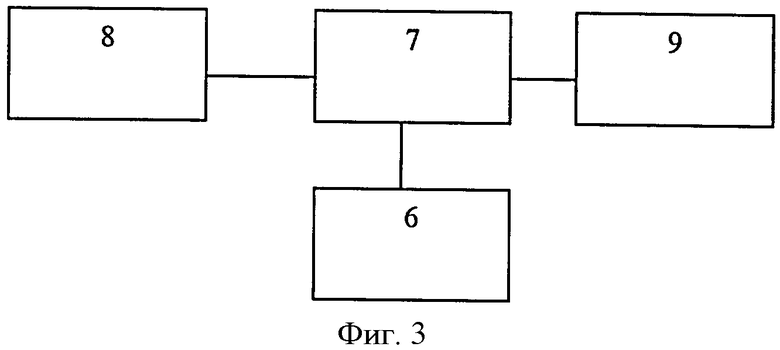
На фиг.3 показан вариант части системы, находящийся на железнодорожном транспортном средстве.
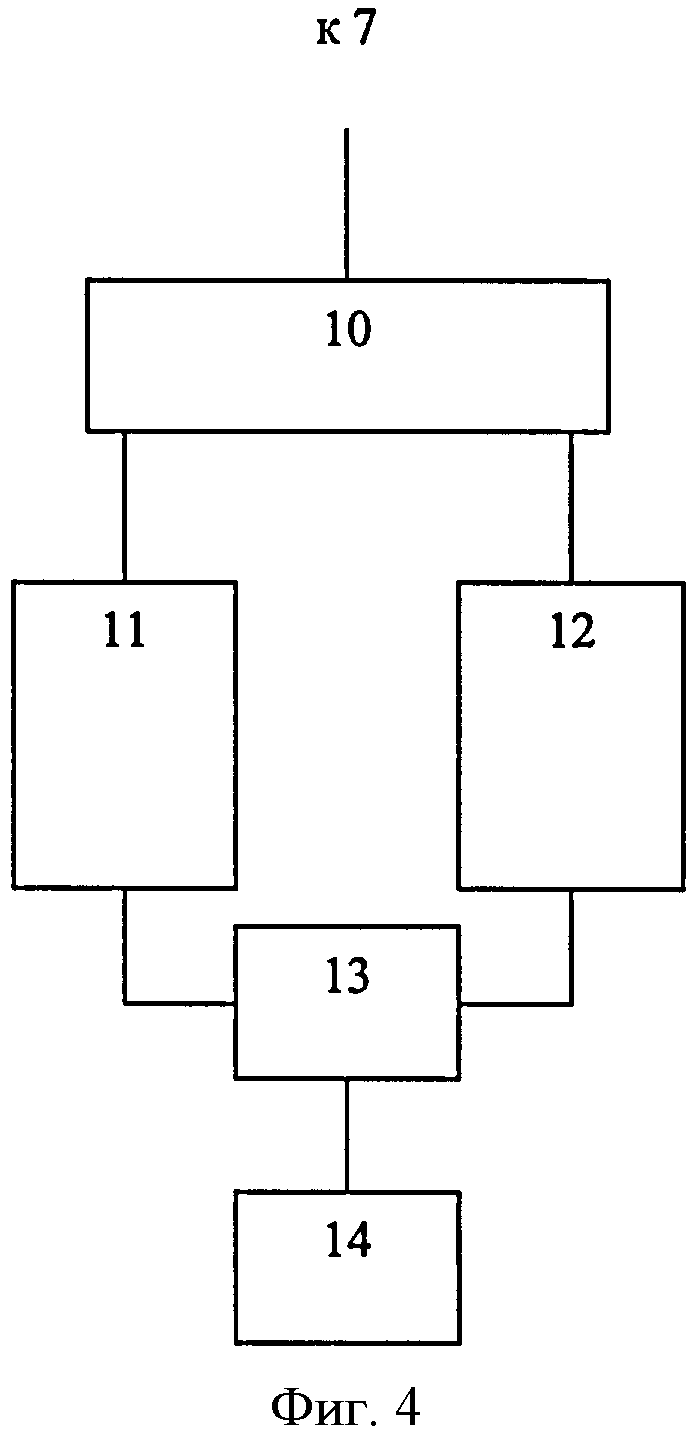
На фиг.4 показан пример реализации радиочастотного считывателя, устанавливаемого на железнодорожном транспортном средстве.
Способ и система прицельной остановки железнодорожных транспортных средств, в основном моторвагонного подвижного состава (МВПС), основаны на использовании технологии радиочастотной идентификации (RFID), при которой осуществляется последовательное считывание и обработка информации, как минимум, с двух пассивных радиочастотных меток, расположенных на пути следования железнодорожного транспортного средства, при этом первая метка находится на подъезде, например, к платформе, а вторая располагается в конце участка пути в месте остановки, например в конце платформы.
Устройство управления 7, расположенное на железнодорожном транспортном средстве 5, обрабатывает информацию, поступающую с устройства измерения скорости 8 и через радиочастотный считыватель 6 с первой радиочастотной метки 1. Первая радиочастотная метка 1 располагается на участке железнодорожного пути при подъезде к месту остановки, например к платформе 3, на известном расстоянии от второй радиочастотной метки, которая располагается в месте останова, таким образом, что начало железнодорожного транспортного средства располагалось на линии останова 4. Устройство управления 7 на основании полученной информации вырабатывает управляющий сигнал на устройство регулирования скорости 9 железнодорожного транспортного средства, которое осуществляет процесс торможения по заранее заданному закону. Торможение осуществляется таким образом, чтобы к моменту достижения железнодорожным транспортным средством 5 второй радиочастотной метки 2 скорость железнодорожного транспортного средства 5 была бы близка к нулевой, а останов железнодорожного транспортного средства осуществляется сигналом, полученным радиочастотным считывателем 6 со второй радиочастотной метки 2. Для каждого участка пути, для каждой платформы 3, первый радиочастотный датчик 1 содержит характеристики участка пути, например код станции/платформы, расстояние до второго датчика или координаты первого и второго радиочастотных датчиков и т.д. Информация второго радиочастотного датчика логически связана с информацией первой радиочастотной метки. Эта логическая связь может осуществляться наличием общей информации, например кода платформы или тупика, наличием координат обоих датчиков и т.д.
Первая радиочастотная метка 1 устанавливается на таком же расстоянии от линии останова 4 (фиг.1), на каком устанавливается радиочастотный считыватель 6 от начала железнодорожного транспортного средства 5 (фиг.2)
Минимальное расстояние между первой и второй радиочастотной меткой определяется минимальным временем торможения железнодорожного транспортного средства от максимально возможной для данного пути скорости железнодорожного транспортного средства до полного останова. Расстояние между первым и вторым радиочастотными датчиками целесообразно выбирать минимально возможным, так как при увеличении расстояния между ними возрастает ошибка определения координат, связанная с погрешностями различных устройств в системе.
Система работает следующим образом. При приближении железнодорожного транспортного средства 5, например МВПС, к месту останова, например к платформе 3, радиочастотный считыватель 6, работающий постоянно или включающийся по командам устройства управления 7 в соответствии с заложенной в нем картой пути, через приемопередающую антенну 14 считывает информацию с первой радиочастотной метки 1, декодирует ее в приемнике ответного сигнала 12, выделяет необходимые данные в устройстве управления радиочастотным считывателем 10 и передает ее в устройство управления 7. Первая радиочастотная метка 1 содержит и передает в устройство управления 7 всю необходимую информацию, в том или ином виде, о расстоянии до второй радиочастотной метки 2. Устройство управления 7 на основе заложенного в него алгоритма и на основании данных о скорости железнодорожного транспортного средства, полученных с устройства измерения скорости 8, вырабатывает управляющий сигнал, который поступает на устройство регулирования скорости 9 железнодорожного транспортного средства, которое осуществляет процесс торможения по заранее заданному закону таким образом, чтобы при подъезде к второй радиочастотной метке 2 иметь скорость порядка 2-5 км/час. При подъезде ко второй радиочастотной метке 2 она попадает в диаграмму направленности 15 приемопередающей антенны 14 радиочастотного считывателя 6. Считанная информация обрабатывается и проверяется устройством управления 7, что эта радиочастотная метка является местом останова и при выполнении определенного критерия, например максимума мощности ответного сигнала, выдает управляющий сигнал на устройство регулирования скорости 9 на полную остановку железнодорожного транспортного средства 5.
Радиочастотный считыватель 6 и радиочастотные метки 1 и 2 могут быть выполнены по технологии радиочастотной идентификации с пассивными радиочастотными метками, например, по патенту РФ №2222030, при этом радиочастотные метки устанавливаются на железнодорожном пути, в частности могут крепиться к шпалам, а приемопередающая антенна 14 радиочастотного считывателя 6 устанавливается на днище железнодорожного транспортного средства, при этом ее диаграмма направленности направлена вниз. Остальные элементы радиочастотного считывателя могут быть установлены в кабине машиниста.
В качестве устройства измерения скорости 8 и устройства регулирования скорости 9 могут быть использованы штатные устройства железнодорожного транспортного средства 5.
Устройство управления 7 может быть выполнено на базе стандартного микропроцессорного блока.
Приемопередающая антенна 14 радиочастотного считывателя 6 конструктивно может быть выполнена по любой известной технологии, например, в виде микрополосковой антенны. Конструкции микрополосковых антенн обеспечивают хорошую повторяемость характеристик при серийном производстве. Ширина диаграммы направленности 15 по ходу движения может быть любой, минимальная ширина диаграммы направленности 15 выбирается из расчета, чтобы обеспечить считывание не менее 3-х полных пакетов информации при скорости 2-5 км/час. Ширина диаграммы направленности 15 будет определять точность останова железнодорожного транспортного средства 5 относительно линии останова 4.
Точность остановки можно повысить, если использовать дополнительные критерии. В качестве такого критерия может выступать, например, максимум излучения ответного сигнала (приемопередающая антенна располагается непосредственно над вторым радиочастотным датчиком). При использовании такого критерия к аппаратуре радиочастотного считывателя 6, в частности к характеристикам приемопередающей антенны 14, к формирователю запросного сигнала 11, приемнику ответных сигналов 12 могут не предъявляться очень высокие требования. Поиск такого максимума достаточно просто технически организовать с использованием выпрямительного устройства и аналого-цифрового преобразователя.
Повысить плавность торможения и точность останова можно, используя дополнительные радиочастотные метки, расположенные между первой и второй радиочастотными метками. Они могут содержать, например, свои точные координаты, расстояния до второй радиочастотной метки или другую информацию, способную скорректировать процесс торможения.
В систему для определения текущих координат железнодорожного транспортного средства может быть введена система позиционирования, например система глобальной спутниковой навигации (СГСН), в частности, например, GPS или ГЛОНАСС. Так как данные, получаемые с СГСН, в динамике из-за своей низкой точности не позволяют обеспечить точное прицельное торможение, то радиочастотные метки в данном случае могут содержать свои точные координаты и выступать в качестве корректирующих маяков для повышения точности.
СГСН также может выступать в качестве измерителя скорости железнодорожного транспортного средства.
СГСН может быть использована в системе для формирования команд на включение запросного сигнала в радиочастотном считывателе 6 при подъезде к первой радиочастотной метке 1.
В систему может быть введен второй радиочастотный считыватель, приемопередающая антенна которого смещена на известное расстояние по ходу движения относительно приемопередающей антенны первого радиочастотного считывателя. Например, приемопередающая антенна первого радиочастотного считывателя устанавливается на дно железнодорожного транспортного средства ближе к одному концу, вторая антенна - к другому концу. Введение второго радиочастотного считывателя позволяет более точно позиционировать железнодорожное транспортное средство относительно платформы. Это осуществляется следующим образом. При подъезде ко второй, по ходу движения, радиочастотной метке первый радиочастотный считыватель фиксирует наличие данной радиочастотной метки и дает команду на снижение скорости железнодорожного транспортного средства, останов которого осуществляется при появлении сигнала данной радиочастотной метки на втором радиочастотном считывателе. Наличие второго радиочастотного считывателя позволяет также определять мгновенную скорость железнодорожного транспортного средства, если расстояние между ними заложено в управляющее устройство. Сами первый и второй радиочастотные считыватели могут находиться как в непосредственной близости от соответствующих приемопередающих антенн, так и в любом другом месте на днище железнодорожного транспортного средства. При наличии двух приемопередающих антенн может быть использован один радиочастотный считыватель, работающий с двумя приемопередающими антеннами, подключенными к радиочастотному считывателю, например, через управляемый устройством управления коммутатор.
При использовании данной системы на моторвагонном подвижном составе (электричках) считанная с радиочастотных меток информация, содержащая данные об участке пути или платформы (например, код платформы), может обрабатываться в устройстве управления на предмет принятия решения об остановке. При данном построении системы в устройстве управления должна быть записана база данных с кодами участков пути (платформ). В соответствии с маршрутом машиниста (расписанием маршрута электрички), который может быть записан в устройство управления или постоянно или вводится для данного маршрута с каких-либо носителей (например, магнитной карты), и данными, считанными с радиочастотной метки, определяется необходимость остановки и выносится решение о торможении.
Для выбора оптимального режима торможения железнодорожного транспортного средства измеряется расстояние между первой и второй радиочастотными метками. Эти данные могут быть записаны как в первой, по ходу движения железнодорожного транспортного средства, радиочастотной метке, так и в устройстве управления. В первом случае устройство управления выделяет из потока данных необходимую информацию и принимает решение о выборе оптимального процесса торможения. Во втором случае устройство управления определяет расстояние между радиочастотными метками на основании полученного с первой радиочастотной метки кода участка пути или платформы и записанного в памяти устройства управления соответствующего этому коду значения.
Процесс торможения можно сделать еще более оптимальным за счет программной коррекции скорости железнодорожного транспортного средства. Для этого между первой и второй радиочастотными метками необходимо расположить дополнительные радиочастотные метки с записанными в них координатами их расположения. Координаты могут быть как абсолютные, так и относительные. Во втором случае, например, в первую радиочастотную метку может быть записано расстояние между первой радиочастотной меткой и первой дополнительной меткой. Устройство управления на основании информации, полученной с первой радиочастотной метки, должно иметь возможность идентифицировать дополнительные радиочастотные метки.
Система прицельного торможения может работать и в ручном режиме. При этом может использоваться индикаторное устройство, которое выдает информацию машинисту о необходимости торможения. При наличии ручного режима система может исполнять функцию контрольного устройства, записывающего реальный процесс движения относительно радиочастотных меток, расположение которых относительно платформы известно, для последующего анализа действий машиниста.
При использовании систем автоматического ведения железнодорожного транспортного средства (автоведение) управляющее устройство 7 может выдавать управляющий сигнал на эту систему. Система автоведения может быть выполнена, например, по патенту РФ №2273567.
На однопутных дорогах с двухсторонним движением могут устанавливаться, как минимум, четыре радиочастотные метки, при этом каждая пара радиочастотных меток содержит информацию, позволяющую их идентифицировать железнодорожному транспортному средству, двигающемуся только в соответствующем направлении. Остальные радиочастотные метки могут использоваться для коррекции параметров движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЧИТЫВАНИЯ ИНФОРМАЦИИ С РАДИОЧАСТОТНОЙ МЕТКИ КОЛЕСНОЙ ПАРЫ И СИСТЕМА, РЕАЛИЗУЮЩАЯ ДАННЫЙ СПОСОБ | 2005 |
|
RU2314957C2 |
| СПОСОБ И УСТРОЙСТВО ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2020 |
|
RU2747750C1 |
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2012 |
|
RU2499714C2 |
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2014 |
|
RU2559869C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА СЧИТЫВАНИЯ ИДЕНТИФИКАЦИОННОЙ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2320510C2 |
| Система определения местоположения железнодорожного подвижного состава | 2018 |
|
RU2698498C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ ПОДВИЖНОГО СОСТАВА НА МНОГОПУТНЫХ УЧАСТКАХ ЖЕЛЕЗНОЙ ДОРОГИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2314956C2 |
| ПАССИВНАЯ МЕТКА СИСТЕМЫ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ДЛЯ ТРАНСПОРТНЫХ ПРИЛОЖЕНИЙ | 2010 |
|
RU2461103C2 |
| УСТРОЙСТВО ФИКСАЦИИ ПРОХОЖДЕНИЯ КОЛЕСНОЙ ПАРЫ | 2008 |
|
RU2379209C1 |
| ПАССИВНАЯ РАДИОМЕТКА СИСТЕМЫ АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ С ВОЗМОЖНОСТЬЮ ПЕРЕДАЧИ ХАРАКТЕРИСТИК ОБЪЕКТА | 2007 |
|
RU2342679C1 |
Изобретение относится к области организации и управления движением на железных дорогах, а именно к системам прицельного торможения моторвагонного подвижного состава (МВПС), в частности, для высокоточной остановки электропоездов около платформ. Способ и система прицельной остановки железнодорожных транспортных средств, в основном моторвагонного подвижного состава (МВПС), основаны на использовании технологии радиочастотной идентификации (RFID), при которой осуществляется последовательное считывание и обработка информации, как минимум, с двух пассивных радиочастотных меток, расположенных на пути следования железнодорожного транспортного средства, при этом первая метка находится на подъезде, например, к платформе, а вторая располагается в конце участка пути в месте остановки, например в конце платформы. Технический результат состоит в обеспечении точного (прицельного) торможения электропоездов. 2 н. и 12 з.п. ф-лы, 4 ил.
1. Способ прицельной остановки железнодорожного транспортного средства, состоящий в том, что на каждом участке железнодорожного пути при подъезде к месту остановки, по каждому направлению движения, располагаются, как минимум, две радиочастотные метки, при этом первая метка находится на подъезде к участку остановки, а вторая располагается в месте остановки, а устройство управления, расположенное на железнодорожном транспортном средстве, обрабатывает информацию, поступающую с устройства измерения скорости и через радиочастотный считыватель с первой радиочастотной метки, расположенной на участке железнодорожного пути при подъезде к месту остановки на известном расстоянии от второй радиочастотной метки на данном участке пути, и вырабатывает управляющий сигнал на тормозную систему железнодорожного транспортного средства, которая осуществляет по заранее заданному закону процесс торможения таким образом, чтобы к моменту достижения железнодорожным транспортным средством второй радиочастотной метки скорость железнодорожного транспортного средства была бы близка к нулевой, а останов железнодорожного транспортного средства осуществляется сигналом, полученным радиочастотным считывателем со второй радиочастотной метки, при этом характеристики участка пути до места остановки закодированы в первой радиочастотной метке, а информация второй радиочастотной метки логически связана с информацией первой метки.
2. Система прицельной остановки железнодорожных транспортных средств, содержащая, по меньшей мере, две радиочастотные метки на каждом участке пути, где необходима остановка, установленные на известных местах железнодорожного пути, и расположенный на железнодорожном транспортном средстве радиочастотный считыватель, выход которого соединен с первым входом устройства управления, с выхода которого управляющие сигналы поступают на устройство регулирования скорости железнодорожного транспортного средства, отличающаяся тем, что в систему вводится устройство измерения скорости железнодорожного транспортного средства, выход которого соединен со вторым входом устройства управления, которое формирует управляющие сигналы в зависимости от текущей скорости железнодорожного транспортного средства и информации, полученной радиочастотным считывателем с первой по ходу движения радиочастотной метки, которая содержит информацию об участке торможения и расстоянии до второй радиочастотной метки, при достижении которой происходит полная остановка железнодорожного транспортного средства.
3. Система по п.2, отличающаяся тем, что радиочастотный считыватель включается при подъезде железнодорожного транспортного средства к первой радиочастотной метке.
4. Система по п.2, отличающаяся тем, что в систему вводится второй радиочастотный считыватель, приемопередающая антенна которого смещена на известное расстояние по ходу движения относительно приемопередающей антенны первого радиочастотного считывателя, выход которого соединен со входом устройства управления.
5. Система по п.2, отличающаяся тем, что в устройстве управления записана база данных с маршрутом машиниста, информация с которой сравнивается с записанным в первую радиочастотную метку кодом участка пути, где необходима остановка, и выносится решение о торможении.
6. Система по п.2, отличающаяся тем, что первая и вторая радиочастотные метки находятся на известном расстоянии друг от друга, значение которого записано в устройстве управления.
7. Система по п.2, отличающаяся тем, что первая и вторая радиочастотные метки находятся на известном расстоянии друг от друга, значение которого запрограммировано в первой, по ходу движения, радиочастотной метке.
8. Система по п.2, отличающаяся тем, что между первой и второй радиочастотными метками находятся дополнительные радиочастотные метки с записанными в них координатами их расположения.
9. Система по п.2, отличающаяся тем, что управляющий сигнал поступает на индикатор.
10. Система по п.2, отличающаяся тем, что устройство регулирования скорости выполнено в виде системы автоматического ведения железнодорожного транспортного средства.
11. Система по п.2, отличающаяся тем, что на однопутных дорогах с двухсторонним движением устанавливаются, как минимум, четыре радиочастотные метки, при этом каждая пара радиочастотных меток содержит информацию, позволяющую их идентифицировать железнодорожному транспортному средству, двигающемуся только в соответствующем направлении.
12. Система по п.2, отличающаяся тем, что для измерения текущих координат используется система позиционирования.
13. Система по п.2, отличающаяся тем, что для измерения текущих координат используется система глобальной спутниковой навигации.
14. Система по п.2, отличающаяся тем, что в качестве устройства измерения скорости используется система спутникового позиционирования.
| RU 1184938 C1, 10.10.2006 | |||
| СПОСОБ ТЕРМОХИМИОЛУЧЕВОГО ЛЕЧЕНИЯ РАКА ПРЯМОЙ КИШКИ | 2005 |
|
RU2294228C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ЗАЩИТЫ И ОСТАНОВКИ ПОЕЗДА ДЛЯ УПРАВЛЕНИЯ ПОЕЗДОМ С ИСПОЛЬЗОВАНИЕМ ПЕРЕДАЧИ ДАННЫХ | 2004 |
|
RU2346840C2 |
| US 7072747 B2, 04.07.2006 | |||
| Прижимное устройство механизма подачи деревообрабатывающего станка | 1975 |
|
SU593910A1 |
| Способ обезвоживания лесоматериалов | 1983 |
|
SU1112207A1 |

