Изобретение относится к области организации и управления движением на железных дорогах, а именно к системам прицельного торможения мотор-вагонного подвижного состава (МВПС), в частности, для высокоточной остановки электропоездов около платформ. Способ точного позиционирования железнодорожных транспортных средств основан на определении расположения состава относительно пассажирских платформ методом эхолокации с помощью ультразвуковых датчиков, определяющие препятствие по средствам отражения звуковой волны от него.
Технический результат состоит в обеспечении точного (прицельного) торможения электропоездов.
Известна система определения местоположения железнодорожных транспортных средств (патент РФ №2284938), содержащая по меньшей мере один идентификатор пути, установленный на трассе прохождения указанного транспортного средства, расположенные на указанном железнодорожном транспортном средстве средство возбуждения сигнала, указанного идентификатора пути, и средство регистрации сигнала, указанного идентификатора пути, и бортовое вычислительное средство, выполненное с возможностью анализа указанного отклика.
Недостатком данного устройства является установка аппаратуры, как на инфраструктуре (в междупутье), так и на МВПС, что приводит к усложнению, как самой конструкции, так способов ее обслуживания. Кроме того, аппаратура, установленная в междупутье, подвергается возможности дополнительного механического вмешательства со стороны другого подвижного состава (путеочиститель), приводящего к ее излому и, как следствие, к потере ее работоспособности.
Наиболее близким к изобретению является способ и система прицельной остановки железнодорожных транспортных средств (патент РФ №2397094), основанный на использовании технологии радиочастотной идентификации (RFTD), при которой осуществляется последовательное считывание и обработка информации, как минимум, с двух пассивных радиочастотных меток, расположенных на пути следования железнодорожного транспортного средства, при этом первая метка находится на подъезде, например, к платформе, а вторая располагается в конце участка пути в месте остановки, например в конце платформы.
Недостатком данного способа также, как и в предыдущем устройстве, является сложность устройства, необходимость постоянного обслуживания оборудования, установленного в междупутье, и вероятность излома аппаратуры в междупутье.
Техническая задача, решаемая с помощью предлагаемого способа, состоит:
- в обеспечении определения координаты поезда (в метрах) с точностью до ±0,2 м, не требующего постоянного технического обслуживания;
- в определении расположения платформы (слева/справа) с последующей сигнализацией машинисту МВПС о неправильности открытия дверей;
- в определении МВПС полностью в границах пассажирской платформы.
Технический результат, получаемый при реализации предложенного способа, состоит в повышении точности торможения МВПС.
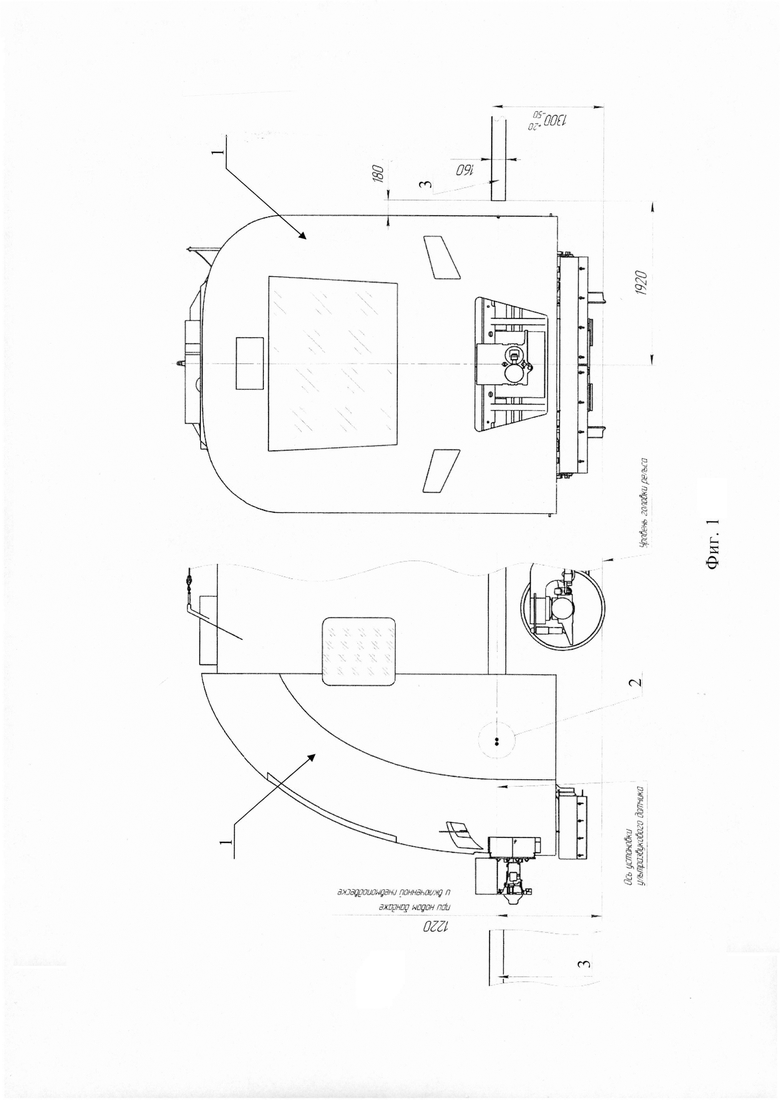
На фиг. 1 показан пример расположения ультразвуковых датчиков на мотор-вагонном подвижном составе.
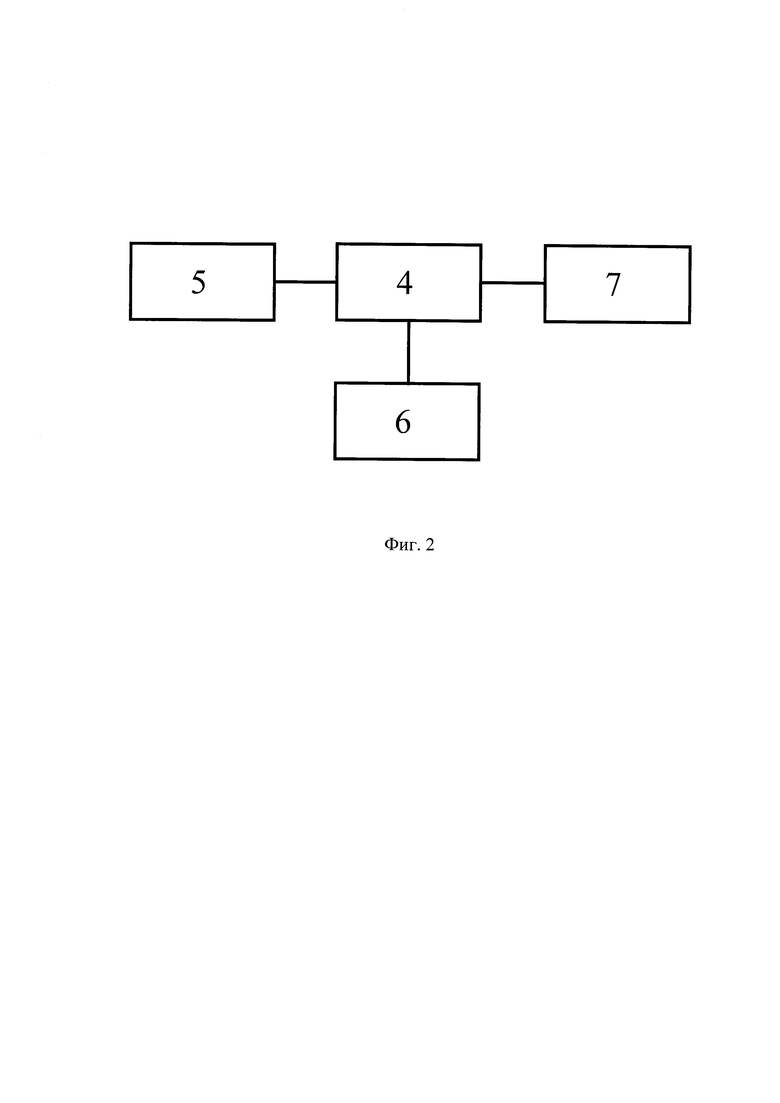
На фиг. 2 показана структурная схема устройства.
Способ точного позиционирования железнодорожных транспортных средств основан на методе эхолокации, при котором осуществляется считывание и обработка информации с ультразвуковых датчиков о препятствии с последующим определением точки остановки на платформе.
Считывание информации происходит, как минимум, из двух мест установки ультразвуковых датчиков в фальшбортах электропоезда, на головном вагоне и на хвостовом вагоне, что позволяет определять начало платформы и полное нахождение электропоезда в границах платформы.
Устройство работает следующим образом. При подаче на ультразвуковой датчик 2 напряжения 100 В датчик излучает высокочастотные звуковые импульсы с частотой 40 кГц. Они распространяются в воздухе со скоростью звука (330 м/с). При встрече препятствия 3 (пассажирская платформа) звуковая волна отражается от нее обратно в качестве эха, попадает в приемник датчика 2 и фиксируется. Датчик 2 воспринимает отраженный звуковой сигнал и преобразовывает его в напряжение, которое поступает в блок обработки ультразвукового сигнала 6. Наличие пассажирской платформы 3 в зоне действия ультразвукового датчика 2 определяется путем анализа уровня отраженного сигнала и продолжительностью по времени отраженного сигнала. Обработанная информация передается в систему управления 4.
Система управления 4 на основании данных о препятствии 3 от головного вагона, имея записанное ранее расстояние от края платформы 3 до точки остановки, формирует оставшееся расстояние до точки остановки, которое передает в систему автоведения 7 для формирования ею управляющего (тормозного) воздействия на систему управления 4.
При подъезде хвостового вагона к пассажирской платформе 3 по полученному сигналу с ультразвуковых датчиков 2, расположенных на хвостовом вагоне, формируется такое же оставшееся расстояние с учетом длины состава и скорости проследования края платформы 3 хвостовым вагоном.
Информация о скорости железнодорожного транспортного средства 1 поступает с блока связи с датчиками пути скорости БС-ДПС-БЗС 5.
В качестве системы торможения могут быть использованы системы автоведения, применяемые на железнодорожном транспорте.
Система управления может быть выполнена на базе микропроцессорной системы управления и диагностики (МПСУиД).
Расчет абсолютной погрешности определения положения подвижного состава при позиционировании с помощью ультразвуковых датчиков предлагается выполнять по следующей формуле:

где: ΔХ - абсолютная погрешности определения положения;
ΔХС - «статическая» абсолютная погрешность, связанная с собственной погрешностью измерительных приборов и датчиков;
ΔХД - «динамическая» абсолютная погрешность, связанная с задержками передачи данных по сетям и каналам связи, а также со временем обработки данных.

где Vфакт - фактическая скорость движения;
tпер - задержка передачи данных по сетям и каналам связи;
tобр - время обработки данных.
ΔХН - «набегающая» абсолютная погрешность, связанная с неправильным определением датчиком пути и скорости (ДПС) пройденного пути от реперной точки по причине боксований, юза, неправильно введенного диаметра бандажа колесной пары и пр.

где LИЗМ - измеренное значение пути.
Для блоков связи с датчиками пути скорости БС-ДПС-БЗС

1. Статическая абсолютная погрешность ΔХС принимается равной дискрете измерения пройденного пути блоком БС-ДПС-БЗС: ΔХС=0,1 м.
2. «Динамическая» абсолютная погрешность ΔХД прямо пропорциональна периоду обработки данных, полученных от ультразвукового датчика: ΔХД=0,012 с;
Определим ΔХД для различных скоростей движения:

3. «Набегающая» абсолютная погрешность ΔХН определяется как погрешность позиционирования по пройденному пути блоком БС-ДПС-БЗС, появившаяся в течение периода времени от проследования от начала до конца платформы.
В настоящих расчетах принимаем LИЗМ=LПЛ=80 м (длина платформы).

4. Таким образом, суммируя выше определенные значения погрешностей для различных скоростей, получаем следующие абсолютные погрешности определения положения:

5. При стоянке локомотива и/или при использовании методов добавления меток времени в информационные сообщения «динамическая» абсолютная погрешность ΔХД становится равной 0 м, исходя из этого, минимальная абсолютная погрешность, достижимая при позиционировании при помощи ультразвуковых датчиков, составляет 0,22 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК АВТОВЕДЕНИЯ АВ-САУТ | 2024 |
|
RU2834103C1 |
| СПОСОБ И СИСТЕМА ПРИЦЕЛЬНОЙ ОСТАНОВКИ ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2009 |
|
RU2397094C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ЭЛЕКТРОПОЕЗДА | 2018 |
|
RU2733594C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИОННЫХ СООБЩЕНИЙ В МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ УПРАВЛЕНИЯ И ДИАГНОСТИКИ | 2015 |
|
RU2577196C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДОВ КОМПЛЕКСНАЯ | 2019 |
|
RU2732495C1 |
| СПОСОБ ПЕРЕДАЧИ ДАННЫХ ПО СЕТИ ETHERNET МЕЖДУ ОБЪЕДИНЕННЫМИ ЭЛЕКТРОПОЕЗДАМИ ПО БЕСПРОВОДНОЙ СВЯЗИ | 2024 |
|
RU2829209C1 |
| Система для определения оптимального места остановки головного вагона электропоезда в зависимости от количества вагонов в его составе и специфики остановочного пункта | 2017 |
|
RU2653901C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ И ОПОВЕЩЕНИЯ ПАССАЖИРОВ НА ЭЛЕКТРОПОЕЗДЕ | 2018 |
|
RU2741152C2 |
| Автоматизированная система контроля мотор-вагонного подвижного состава | 2021 |
|
RU2774509C1 |
Изобретение относится к средствам управления прицельного торможения моторвагонного подвижного состава. В способе определение расположения состава относительно пассажирских платформ основано на методе эхолокации с помощью ультразвуковых датчиков, определяющих препятствие по средствам отражения звуковой волны от него и расположенных в фальшбортах головного и хвостового вагонов, а устройство управления, расположенное на железнодорожном транспортном средстве, обрабатывает информацию, поступающую с блока связи с датчиками пути и скорости и из блока обработки ультразвукового сигнала с ультразвуковых датчиков головного вагона, имея записанное ранее расстояние от края платформы до точки остановки, формирует оставшееся расстояние до точки остановки, которое передает в систему автоведения для формирования ею управляющего тормозного воздействия на систему управления, а при подъезде хвостового вагона к пассажирской платформе по полученному сигналу с ультразвуковых датчиков, расположенных на хвостовом вагоне, формирует такое же оставшееся расстояние с учетом длины состава и скорости проследования края платформы хвостовым вагоном. Достигается повышение точности прицельного торможения электропоездов. 2 н.п. ф-лы, 2 ил.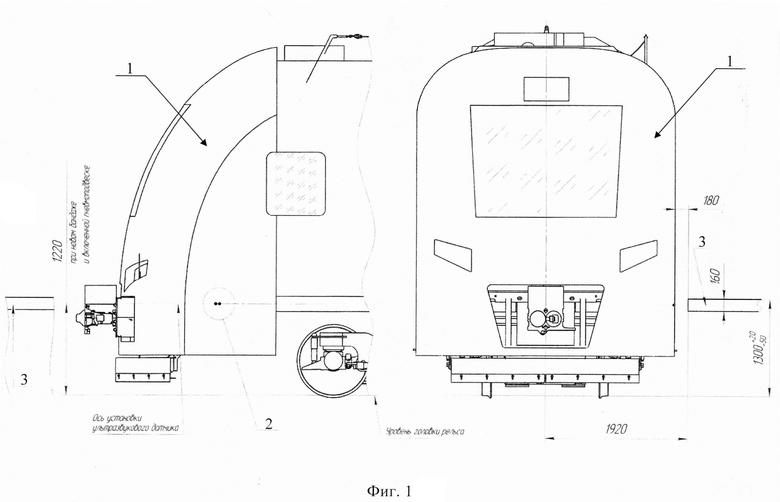
1. Способ точного позиционирования железнодорожных транспортных средств, состоящий в том, что определение расположения состава относительно пассажирских платформ основано на методе эхолокации с помощью ультразвуковых датчиков, определяющих препятствие по средствам отражения звуковой волны от него и расположенных в фальшбортах головного и хвостового вагонов, а устройство управления, расположенное на железнодорожном транспортном средстве, обрабатывает информацию, поступающую с блока связи с датчиками пути и скорости и из блока обработки ультразвукового сигнала с ультразвуковых датчиков головного вагона, и, имея записанное ранее расстояние от края платформы до точки остановки, формирует оставшееся расстояние до точки остановки, которое передает в систему автоведения для формирования ею управляющего тормозного воздействия на систему управления, а при подъезде хвостового вагона к пассажирской платформе по полученному сигналу с ультразвуковых датчиков, расположенных на хвостовом вагоне, формирует такое же оставшееся расстояние с учетом длины состава и скорости проследования края платформы хвостовым вагоном.
2. Устройство точного позиционирования железнодорожных транспортных средств, содержащее блок связи с датчиками пути и скорости, выход которого соединен с первым входом устройства управления, с выхода которого управляющие сигналы поступают в систему автоведения, отличающееся тем, что в состав входят ультразвуковые датчики, расположенные в фальшбортах головного и хвостового вагонов и соединенные с блоком обработки ультразвукового сигнала, выход которого соединен со вторым входом устройства управления, которое формирует управляющие сигналы в зависимости от информации с блока обработки ультразвукового сигнала о расстоянии до начала пассажирской платформы с головного вагона, при достижении которой начинается торможение, и расстояния до начала пассажирской платформы с хвостового вагона, при достижении которой происходит полная остановка железнодорожного транспортного средства.
| 0 |
|
SU154202A1 | |
| JP 5323051 B2, 13.10.2013 | |||
| JP 2012066617 A, 05.04.2012 | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| НЕЛИНЕЙНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ЛОКОМОТИВА | 2018 |
|
RU2684965C1 |

