Область техники
Изобретение относится к способу наблюдения подводных объектов с помощью систем лазерного видения и может быть использовано для формирования изображений подводных объектов с целью их обнаружения и распознавания.
Уровень техники
Специфическая особенность подводного видения состоит в том, что даже при сравнительно небольших дальностях наблюдения решающее влияние на качество изображения оказывают поглощение излучения средой и рассеяние (прямое и обратное) как на молекулах окружающей среды, так и на неорганических и органических частицах, находящихся во взвешенном состоянии. Это влияние проявляется в ослаблении яркости и снижении контрастности изображения, искажении его пространственной структуры, относительном увеличении шумовой составляющей изображения и, в конечном итоге, ограничении дальности видения.
В настоящее время существует несколько наиболее характерных способов получения изображения подводных объектов и устройств для их реализации, основанных на подсветке объекта лазерным излучением. В этих способах устранение проблем, связанных с поглощением и рассеянием излучения в среде распространения, осуществляется посредством выбора оптимальной длины волны излучения, а также контроля временных или пространственных характеристик источника и приемника излучения.
По способам развертки и соотношению диаграмм направленности источника и приемника различают три варианта построения систем видения [1, 2].
В первом варианте [1, 2, 4] подводный объект сканируют зондирующим лазерным излучением с узкой диаграммой направленности, а регистрацию интенсивности излучения, отраженного от различных точек поверхности объекта, посредством приемника с широкой диаграммой направленности.
При реализации второго способа [2, 6, 7] сканирование отсутствует, подводный объект освещают зондирующим лазерным излучением с широкой диаграммой направленности, а регистрацию интенсивности излучения, отраженного от различных точек поверхности объекта, посредством приемника с узкой диаграммой направленности.
Реализация третьего способа [3, 5] отличается от реализации первого тем, что подводный объект сканируют зондирующим лазерным излучением с узкой диаграммой направленности, а регистрацию интенсивности излучения, отраженного от различных точек поверхности объекта, осуществляют посредством приемника с узкой диаграммой направленности, которую перемещают синхронно с пучком подсветки.
Проведенный анализ отобранных патентно-информационных источников показал, что заявляемый способ видения подводных объектов и устройство для его реализации относятся к первому способу развертки и соотношению диаграмм направленности источника и приемника.
Известен способ видения подводных объектов [4], включающий автоматически управляемое двухкоординатное сканирование подводных объектов зондирующим одномодовьм лазерным излучением с узкой диаграммой направленности на длине волны λ=405 нм с модулированием амплитуды лазерного сигнала до частоты νm=100 МГц и регистрацию посредством приемника с широким полем обзора. В данном способе о форме объекта судят по времени запаздывания луча при проходе «туда - обратно» путем демодуляции фазового сигнала на несущей частоте и сравнения его с опорным сигналом. Сканирование осуществляют с разрешением 64×64 пикселя при скорости построения кадра 32 с.
Недостаток способа связан с низким разрешением и низкой скоростью построения кадра, а также небольшой дальностью действия в мутной воде, связанной с увеличением помехи обратного рассеяния вследствие присутствия взвешенных частиц.
Устройство для реализации способа [4] включает передающий канал в виде источника зондирующего лазерного излучения, устройства сканирования лазерного пучка и выходной оптической системы, приемный канал в виде входной оптической системы и фотоприемного устройства. В качестве источника излучения использован диодный лазер (LG Laser Technologies, Blue Photon) с мощностью излучения 20 мВт и длиной волны λ=405 нм с возможностью модулирования амплитуды лазерного сигнала до частоты νm=100 МГц. Сканирующая система представляет собой короткофокусный асферический объектив (f=2 мм) с апертурой 2 мм, устанавливаемый на паре взаимно ортогональных линейных пьезоэлектрических приводов (LINOS PX5-400). Объектив одновременно является элементом, фокусирующим зондирующий луч и сканирующим устройством, поскольку смещение линзы относительно оси приводит к изменению точки сканирования. Диапазон перемещения пьезоэлектрического привода составляет 400 мкм, что соответствует полному углу сканирования 10°. Приемный канал выполнен в виде короткофокусного объектива (f=3 мм) диаметром 5 мм и быстродействующего фотоумножителя (Hamamatsu HP8153). В цепи генерации частоты модуляции νm диодного лазера, а также для измерения сигнала фазовой задержки применяется синхронный усилитель. Персональный компьютер осуществляет автоматическое управление и синхронизацию работы систем сканирования и регистрации.
Недостатком устройства является низкая надежность системы сканирования, построенной на пьезоэлектрических приводах, при работе которых возникает необходимость компенсации ошибок позиционирования, связанных с возникновением механического гистерезиса. Кроме того, использование пьезоэлектрических приводов приводит к ограничению угла обзора (до 10°) вследствие небольшой величины удлинения (изгиба) его элементов.
Известен способ видения [2], включающий автоматически управляемые сканирование подводных объектов зондирующим лазерным излучением в спектральной области прозрачности воды, подавление помехи обратного рассеяния, регистрацию отраженного сигнала, по которому восстанавливают образ объекта. Отраженный от подводного объекта сигнал регистрируют посредством приемника с широким полем обзора. Подавление помехи обратного рассеяния осуществляют посредством стробирования (отпирания) фотоприемного устройства в момент прихода в него отраженного от объекта импульса.
К недостатку этого способа следует отнести малую дальность обнаружения объектов, связанную с помехой обратного рассеяния. Другим недостатком способа является то, что получение двумерного изображения возможно лишь при движении носителя.
Устройство для видения подводных объектов с использованием указанного способа [1] включает передающий канал, состоящий из источника зондирующего лазерного излучения, устройства сканирования лазерным лучом и выходной оптической системы, приемный канал в виде входной оптической системы, фотоприемного устройства и усилителя, установленных в герметичном боксе с окнами. Причем передающий канал и приемный каналы подключены к автоматической системе управления и регистрации. В качестве источника излучения использован импульсно-периодический лазер, система сканирования выполнена в виде вращающихся многогранных зеркал, а фотоприемное устройство снабжено узлом стробирования.
Недостатком устройства является низкая надежность устройства, вызванная тем, что зеркальные сканеры неизбежно имеют механические или электромеханические приводы, обеспечивающие изменение угла отражающей поверхности (поворот, наклон) зеркал, что при высокой скорости сканирования требует усложнения алгоритма управления и механической конструкции.
В качестве прототипа выбран способ видения подводных объектов и устройство для его реализации [1], как наиболее близкий по технической и физической сущности к заявляемому техническому решению.
Раскрытие изобретения.
Технический результат в предлагаемом способе видения подводных объектов и устройстве для его реализации состоит в увеличении дальности видения, улучшении качества изображения, а также в повышении надежности.
Технический результат в заявляемом изобретении по п.1 достигается тем, что способ видения подводных объектов включает автоматически управляемые сканирование подводных объектов зондирующим лазерным излучением с узкой диаграммой направленности в спектральной области прозрачности воды, подавление помехи обратного рассеяния, регистрацию интенсивности излучения, отраженного от различных точек поверхности объекта, посредством приемника с широкой диаграммой направленности, восстановление образа объекта. Новым в заявляемом способе является то, что поверхность объекта попиксельно сканируют по двум координатам импульсно-периодическим лазерным излучением с частотой не менее 2.5 МГц и длительностью импульса не более 2 нс с возможностью изменения угла обзора от 2 до 25 градусов, помеху обратного рассеяния подавляют оптической поляризационной фильтрацией полезного сигнала и стробированием фотоприемного устройства, при предварительной обработке зарегистрированного отраженного сигнала дополнительно снижают влияние прямого рассеяния, а восстановление двумерного образа объекта осуществляют со скоростью не менее 8 кадров в секунду и при разрешении не менее 512×512 пикселей.
Покажем, каким образом достигается указанный выше технический результат по заявляемому способу видения подводных объектов.
Попиксельное сканирование поверхности объекта по двум координатам импульсно-периодическим лазерным излучением с частотой не менее 2.5 МГц и длительностью импульса не более 2 нс с возможностью изменения угла обзора от 2 до 25 градусов при разрешении не менее 512×512 пикселей позволяет осуществлять работу в режиме поиска объекта при максимальных углах обзора и его детальное рассмотрение при минимальных углах обзора и тем самым улучшить качество изображения.
Подавление помехи обратного рассеяния посредством оптической поляризационной фильтрации полезного сигнала наряду со стробированием фотоприемного устройства при выбранных параметрах импульсно-периодического лазерного излучения позволяет значительно (во много раз) увеличить отношение сигнал/шум, эффективно снизить эффект обратного рассеяния, и за счет этого увеличить дальность видения и качество изображения (контрастность и детальность).
При предварительной обработке зарегистрированного отраженного сигнала выделяют максимальное значение амплитуды сигнала фотоприемного устройства, имеющее место на переднем фронте отраженного импульса и соответствующее моменту времени прихода отраженных баллистических фотонов (т.е. фотонов, отраженных прямо назад). Благодаря этому происходит снижение влияния рассеяния вперед, и тем самым увеличивается дальность видения и улучшается качество изображения.
Восстановление двумерного образа объекта со скоростью не менее 8 кадров в секунду и при разрешении не менее 512×512 пикселей позволяет обеспечить получение изображения высокого качества, в том числе при возможности оценки изменения подводной обстановки в реальном масштабе времени.
Технический результат в заявляемом изобретении по п.2 достигается тем, что устройство для видения подводных объектов включает передающий канал в виде источника зондирующего лазерного излучения, устройства сканирования лазерным лучом и выходной оптической системы, приемный канал в виде входной оптической системы, фотоприемного устройства с узлом стробирования и усилителя. Причем передающий канал и приемный каналы подключены к автоматической системе управления и обработки информации. Новым в устройстве является то, что источником зондирующего лазерного излучения служит оптоволоконный лазер с диодной накачкой. Устройство сканирования выполнено в виде двух взаимно ортогональных акустооптических дефлекторов. Выходная оптическая система снабжена фокусирующим объективом-трансфокатором, входная оптическая система снабжена поляризационным фильтром, а за усилителем размещен пиковый детектор с регулируемым устройством задержки.
Покажем, каким образом достигается указанный выше технический результат по заявляемому устройству видения подводных объектов.
Использование сканирующей системы на основе акустооптических дефлекторов с частотой 2.5 МГц и оптоволоконного лазера, в качестве источника зондирующего излучения, работающего в импульсно-периодическом режиме с той же частотой и длительностью импульса не более 2 нс, позволяет увеличить дальность видения, а также качество изображения за счет уменьшения отрицательного влияния помехи обратного рассеяния.
Повышение надежности устройства в целом достигается как использованием оптоволоконного лазера, обладающего более высокой надежностью и долговечностью по сравнению с лазерами других типов, а также акустооптической системы сканирования за счет отсутствия в ней вращающихся или колеблющихся механических узлов.
Использование в выходной оптической системе фокусирующего объектива -трансфокатора обеспечивает возможность как оперативного управления углом сканирования (или размером поля обзора) устройства, так и фокусировки лазерного излучения на разных расстояниях от устройства. Это расширяет функциональные возможности устройства и позволяет улучшить качество изображения.
Использование во входной оптической системе поляризационного фильтра позволяет подавить сигнал обратного рассеяния и тем самым повысить контрастность и детальность изображения за счет того, что сигнал поляризованного обратного рассеяния имеет минимальное пропускание.
Использование пикового детектора с регулируемым устройством задержки позволяет уменьшить влияние рассеяния вперед путем такого преобразования сигнала, при котором осуществляется регистрация максимального значения сигнала ФЭУ, имеющего место на переднем фронте отраженного импульса, что соответствует моменту времени прихода отраженных баллистических фотонов (т.е. фотонов, отраженных от поверхности исследуемого объекта прямо назад).
Не обнаружены технические решения, совокупность признаков в которых совпадает с совокупностью признаков заявляемого способа видения подводных объектов и устройства для его реализации, в том числе с отличительными признаками. Эта новая совокупность признаков является новым техническим средством, которое обеспечивает получение вышеуказанного технического результата, что позволяет сделать вывод о соответствии заявляемого изобретения критерию "изобретательский уровень".
На Фиг.1 представлена схема устройства для реализации способа видения подводных объектов, где: 1 - объект, 2 - среда распространения, 3 - передающий канал, 4 - источник зондирующего излучения, 5 - телескоп, 6 - устройство сканирования, 7 - акустооптический дефлектор в режиме сканирования по координате Y, 8 - акустооптический дефлектор в режиме сканирования по координате X, 9 - выходная оптическая система, 10 - фокусирующий объектив, 11 - объектив-трансфокатор, 12 - приемный канал, 13 - входная оптическая система, 14 - интерференционный фильтр, 15 - поляризационный фильтр, 16 - линза, 17 - фотоприемное устройство с узлом стробирования, 18 - усилитель, 19 - пиковый детектор, 20 - автоматическая система управления и обработки информации, 21 - пульт оператора.
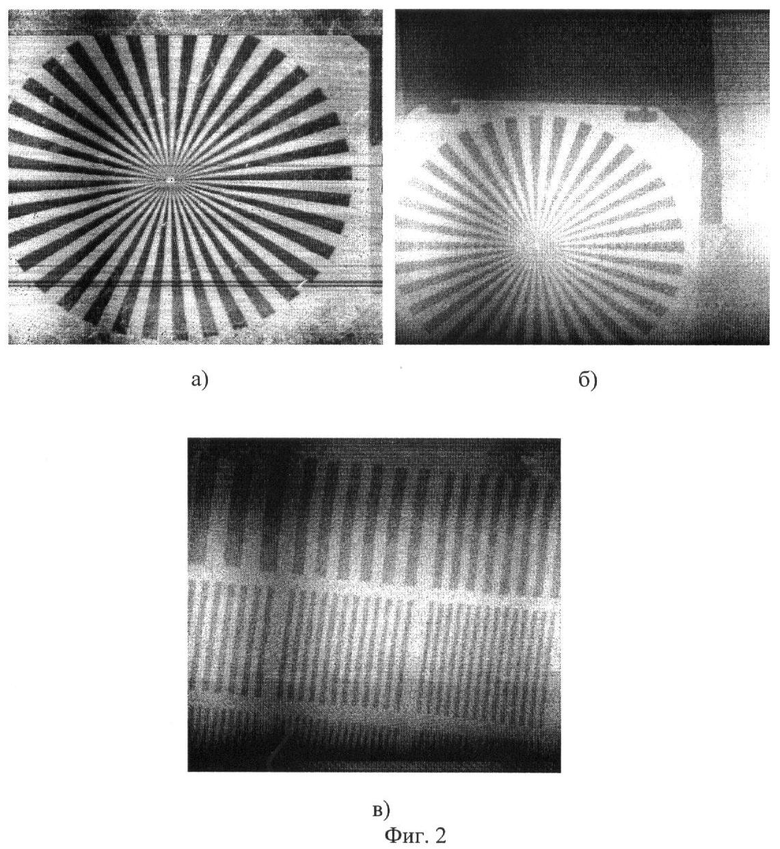
На Фиг.2 представлены изображения оптической миры, полученные в искусственном бассейне (Zб≈30 м, где Zб - максимальная глубина, на которой оказывается предельно различимым стандартный белый диск диаметром 30 см, опускаемый вертикально к поверхности моря):
а) дальность 15 метров, угол обзора φ=12°;
б) дальность 25 метров, угол обзора φ=12°;
в) дальность 27 метров, угол обзора φ=1,6°.
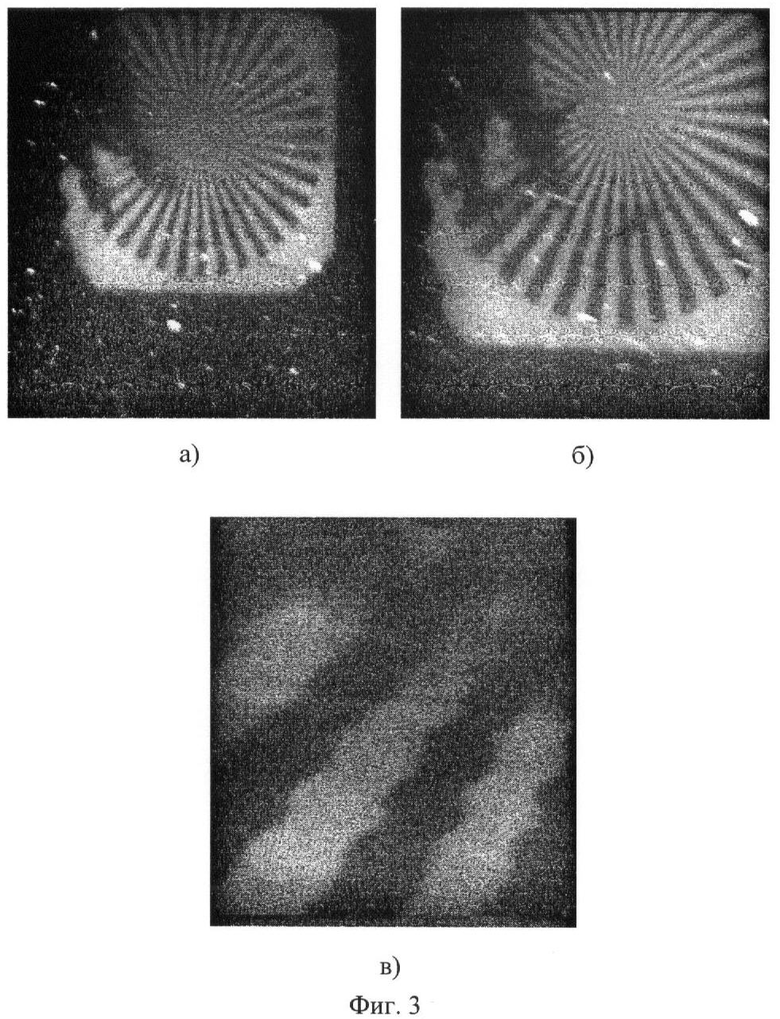
На Фиг.3 представлены изображения оптической миры, полученные в морской акватории на дальности 8 м=1*Zб:
а) угол обзора φ=12°;
б) угол обзора φ=7°;
в) угол обзора φ=1,6°.
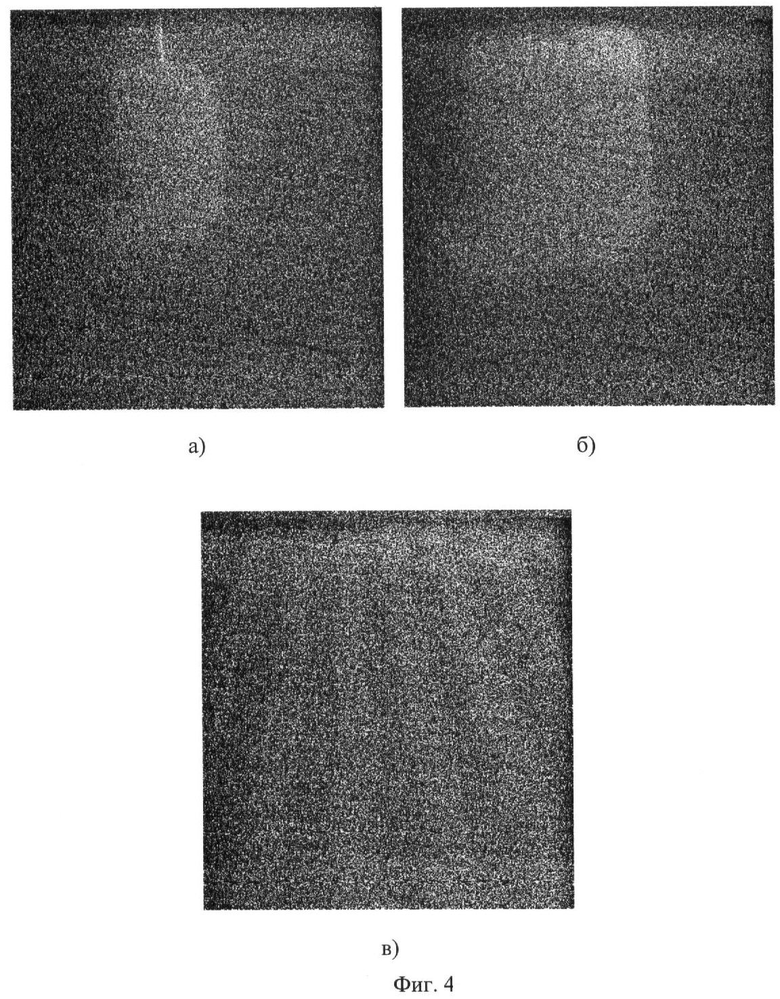
На Фиг.4 представлены изображения оптической миры, полученные в морской акватории на дальности 13,5 м=1,7 Zб:
а) угол обзора φ=12°;
б) угол обзора φ=7°;
в) угол обзора φ=1,6°.
Устройство для реализации способа видения подводных объектов, представленное на Фиг.1, включает: передающий канал 3, в виде источника зондирующего лазерного излучения 4, телескопа 5, устройства сканирования лазерным лучом 6 и выходной оптической системы 9; приемный канал 12, в виде входной оптической системы 13, фотоприемного устройства с узлом стробирования 17, усилителя 18 и пикового детектора 19; причем передающий канал 3 и приемный канал 12 подключены к автоматической системе управления и обработки информации 20, соединенной с пультом оператора 21. Устройство сканирования лазерным лучом 6 выполнено в виде двух взаимно ортогональных акустооптических дефлекторов 7, 8. Выходная оптическая система 9 содержит фокусирующий объектив 10 и объектив-трансфокатор 11. Входная оптическая система 13 содержит интерференционный фильтр 14, поляризационный фильтр 15, линзу 16.
Заявляемый способ видения подводных объектов, в котором все операции и действия являются автоматически управляемыми, работает следующим образом. Поверхность подводного объекта попиксельно сканируют по двум координатам импульсно-периодическим зондирующим лазерным излучением с узкой диаграммой направленности в спектральной области прозрачности воды с возможностью изменения угла обзора от 2 до 25 градусов. Сканирующим лазерным излучением служит излучение с частотой не менее 2.5 МГц и длительностью импульса не более 2 нс. Помеху обратного рассеяния подавляют оптической поляризационной фильтрацией полезного сигнала и стробированием фотоприемного устройства.
Регистрацию интенсивности излучения, отраженного от различных точек поверхности объекта, осуществляют приемником с широкой диаграммой направленности. При предварительной обработке зарегистрированного отраженного сигнала снижают влияние прямого рассеяния, путем выделения максимального значения амплитуды сигнала фотоприемного устройства, имеющего место на переднем фронте импульса и соответствующего моменту времени прихода фотонов, отраженных прямо назад. Восстановление двумерного образа объекта осуществляют со скоростью не менее 8 кадров в секунду и при разрешении не менее 512×512 пикселей.
Устройство для реализации способа видения подводных объектов работает следующим образом. Поверхность подводного объекта 1 через среду распространения 2 попиксельно сканируют по двум координатам импульсно-периодическим зондирующим лазерным излучением с узкой диаграммой направленности в спектральной области прозрачности воды, сформированным посредством передающего канала 3. При формировании зондирующего излучения луч лазера 4 с частотой не менее 2.5 МГц и длительностью импульса не более 2 нс проходит последовательно через телескоп 5, устройство сканирования 6, в котором два акустооптических дефлектора 7, 8, сканируют лазерный луч в двух взаимно перпендикулярных направлениях (Y и Х координаты) на угол ±2° (ΔϑY,X), фокусирующий объектив 10 и объектив-трансфокатор 11 выходной оптической системы 9. Телескоп 5 обеспечивает согласование апертуры лазера и апертуры акустооптических дефлекторов. Фокусирующий объектив 10 позволяет сфокусировать лазерное излучение после устройства сканирования 6 в пятно минимальных размеров для последующего перестроения этого пятна на входное окно объектива-трансфокатора 11. Посредством объектива-трансфокатора 11 изменяют углы сканирования от 2° до 25°, а также фокусируют лазерное излучение на разных расстояниях от устройства.
Отраженное от поверхности объекта 1 излучение после обратного прохода через среду распространения 2 в приемном канале 12 поступает во входную оптическую систему 13, в которой оно подвергается спектральной селекции рабочей длины излучения посредством интерференционного фильтра 14 и поляризационной селекции посредством поляризационного фильтра 15, обеспечивающего подавление помехи обратного рассеяния. При прохождении излучения через линзу 16 формируют оптимальную ширину его диаграммы направленности с последующей регистрацией отраженных импульсно-периодических оптических сигналов с высокой частотой повторения на фотоприемном устройстве с узлом стробирования 17 и усилением в усилителе 18. При этом посредством узла стробирования обеспечивают отсекание паразитного сигнала, связанного с помехой обратного рассеяния. С выхода усилителя 18 сигнал поступает в пиковый детектор 19, который обеспечивает предварительную обработку полезного оптического сигнала. Пиковым детектором 19 с регулируемым устройством задержки регистрируют максимальное значение сигнала фотоприемного устройства 17, имеющее место на переднем фронте отраженного импульса, чем обеспечивают уменьшение влияния рассеяния вперед. С выхода пикового детектора 19 сигнал подают в систему управления и обработки информации 20. Этой системой обеспечивают прием, цифровое преобразование и обработку входного сигнала с выхода пикового детектора 19, а также отображение полученной информации на мониторе пульта оператора 21. Восстановление двумерного образа объекта осуществляют со скоростью не менее 8 кадров в секунду и при разрешении не менее 512×512 пикселей. Кроме того, посредством автоматической системы управления и обработки информации 20 осуществляют формирование синхронизирующих и управляющих импульсов, индикацию режимов устройства, выполнение команд оператора.
На предприятии создан макет устройства для подводного видения объектов и проведена его экспериментальная проверка в условиях искусственного бассейна и морской акватории.
Макет устройства был испытан в искусственном бассейне и в морской акватории.
На Фиг.2 представлены изображения оптической миры, зондируемой с расстояний 15, 25, 27 м в искусственном бассейне с чистой водой, где Zб составляло ≈30 м. Съемка проводилась при полном отсутствии естественной освещенности (в затемненном бассейне). Детали миры отчетливо просматривались, диаметр «кружка невидимости» при LД=25 м составлял приблизительно 5 см, что соответствует разрешению R~2 см-1. Это означает, что объект с размером 5 мм различался на дальности 25 м.
На Фиг.3 и 4 представлены изображения оптической миры, полученные с помощью макета с расстояний 8 и 14 м. Углы обзора и размеры поля сканирования изменялись. Прозрачность воды Zб≈8 м. Волнение моря - от 0,5 до 1 балла.
На расстоянии 8 м было получено отчетливое изображение миры с высокой контрастностью и разрешением порядка R~1 см-1. Наблюдаемая волнистость секторов миры связана с небольшой качкой во время эксперимента. На этой же дальности более детальное рассмотрение объекта можно получить, перейдя на меньшие углы обзора (7° и 1,6°).
На максимальной дальности 14 м, что составляло 1,75 Zб, были получены только контуры тест-объекта при низкой контрастности, хотя при минимальных углах обзора сектора миры различались удовлетворительно.
Предлагаемый способ видения подводных объектов и устройство для его реализации, благодаря увеличению дальности видения и улучшению качества изображения при высокой надежности, найдет широкое применение в геодезии и картографии для быстрой оценки подводной обстановки, построения детального изображения подводного ландшафта и детализации объектов.
Список использованных источников
1. Л.С.Долин, И.М.Левин. Справочник по теории подводного видения. Л.: Гидрометеоиздат, 1991, с.42-48.
2. В.Е.Карасик, В.М.Орлов. Лазерные системы видения. М.: МГТУ им. Н.Э.Баумана, 2001, с.46-53.
3. M.G.Gibby and J.H. Fahs. Underwater Synchronous Scanner Imaging Model (USSIM). ARION SYSTEMS, INC., 15059 Conference Center Drive Suite 200 Chantilly, VA 20151, 1991, с.10.
4. Luciano Bartolini, Luigi De Dominicis, Mario Ferri de Collibus, Giorgio Fometti, Massimiliano Guarneri, Emiliano Paglia, Claudio Poggi, and Roberto Ricci. Underwater three-dimensional imaging with an amplitude-modulated laser radar at a 405 nm wavelength. Applied Optics/Vol.44, No. 33, pp.7130-7135 (2005).
5. Karl D. Moore, Jules S. Jaffe, and Benjamin L. Ochoa Development of a New Underwater Bathymetric Laser Imaging System: L-Bath Scripps Institution of Oceanography, University of California, San Diego, La Jolla, California, 1999.
6. Атнашев В.Б. Способ видения объектов с помощью лазерной подсветки и устройство для его осуществления. RU 2205426, G01S 17/00, G02В 23/10 (26.07.2002).
7. Волков В.В. Активно-импульсные приборы ночного видения. «Специальная техника». ОАО ХК «Электрозавод», 2000 г. http//www:st.essru/scripts/ Активно-импульсывные приборы ночного видения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВИДЕНИЯ ОБЪЕКТОВ В МУТНЫХ ОПТИЧЕСКИХ СРЕДАХ | 2011 |
|
RU2465619C1 |
| УСТРОЙСТВО ДЛЯ ВИДЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2022 |
|
RU2794167C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА НА МАЛЫХ ДИСТАНЦИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2549210C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2568336C2 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |
| СПОСОБ ЗАЩИТЫ БРОНЕТАНКОВОЙ ТЕХНИКИ | 2008 |
|
RU2373482C2 |
| КОМПЛЕКС ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2529758C1 |
Способ видения подводных объектов включает автоматически управляемые сканирование подводных объектов лазерным излучением с узкой диаграммой направленности, подавление помехи обратного рассеяния и регистрацию интенсивности излучения, отраженного от различных точек поверхности объекта. Поверхность объекта сканируют попиксельно по двум координатам импульсно-периодическим лазерным излучением. Помеху обратного рассеяния подавляют оптической поляризационной фильтрацией полезного сигнала и стробированием фотоприемного устройства. При предварительной обработке зарегистрированного отраженного сигнала дополнительно снижают влияние прямого рассеяния. Источником лазерного излучения служит оптоволоконный лазер с диодной накачкой, а устройство сканирования выполнено в виде двух взаимно ортогональных акустооптических дефлекторов. Выходная оптическая система снабжена фокусирующим объективом-трансфокатором. Приемный канал в виде входной оптической системы содержит поляризационный фильтр, фотоприемное устройство с узлом стробирования и усилитель, причем за усилителем размещен пиковый детектор с регулируемым устройством задержки. Технический результат заключается в повышении надежности, в увеличении дальности видения и улучшении качества изображения. 2 н.п. ф-лы, 4 ил.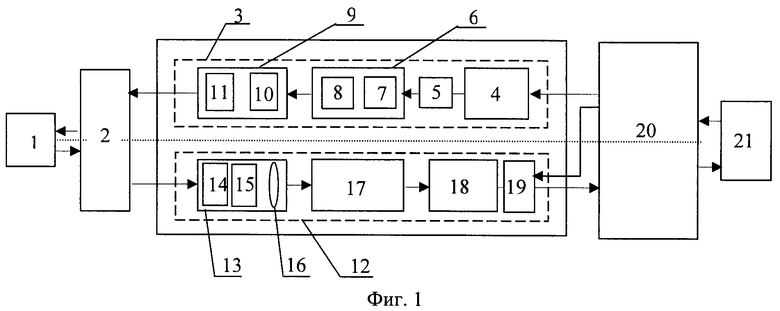
1. Способ видения подводных объектов, включающий автоматически управляемые сканирование подводных объектов зондирующим лазерным излучением с узкой диаграммой направленности в спектральной области прозрачности воды, подавление помехи обратного рассеяния, регистрацию интенсивности излучения, отраженного от различных точек поверхности объекта, посредством приемника с широкой диаграммой направленности, восстановление образа объекта, отличающийся тем, что поверхность объекта попиксельно сканируют по двум координатам импульсно-периодическим лазерным излучением с частотой не менее 2.5 МГц и длительностью импульса не более 2 нс с возможностью изменения угла обзора от 2 до 25°, помеху обратного рассеяния подавляют оптической поляризационной фильтрацией полезного сигнала и стробированием фотоприемного устройства, при предварительной обработке зарегистрированного отраженного сигнала дополнительно снижают влияние прямого рассеяния, а восстановление двумерного образа объекта осуществляют со скоростью не менее 8 кадров в секунду и при разрешении не менее 512×512 пикселей.
2. Устройство для видения подводных объектов, включающее передающий канал в виде источника зондирующего лазерного излучения, устройства сканирования лазерным лучом и выходной оптической системы, приемный канал в виде входной оптической системы, фотоприемного устройства с узлом стробирования и усилителя, причем передающий канал и приемный каналы подключены к автоматической системе управления и обработки информации, отличающееся тем, что источником зондирующего лазерного излучения служит оптоволоконный лазер с диодной накачкой, устройство сканирования выполнено в виде двух взаимно ортогональных акустооптических дефлекторов, выходная оптическая система снабжена фокусирующим объективом-трансфокатором, входная оптическая система снабжена поляризационным фильтром, а за усилителем размещен пиковый детектор с регулируемым устройством задержки.
| JP 10162119 A, 19.06.1998 | |||
| US 6216540 B1, 17.04.2001 | |||
| US 6388246 B1, 14.05.2002 | |||
| СПОСОБ НОЧНОГО И/ИЛИ ДНЕВНОГО НАБЛЮДЕНИЯ УДАЛЕННОГО ОБЪЕКТА С СИНХРОННОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ ЛАЗЕРНЫМИ ИМПУЛЬСАМИ ПОДСВЕТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2269804C1 |
| RU 2005115100 A, 10.10.2005. | |||

