Изобретение относится к области обнаружения в пространстве объектов, к способам и устройствам лазерной локации и может быть использовано в системах обнаружения и распознавания целей, в системах предупреждения столкновения транспортных средств, в навигационных устройствах и в системах охранной сигнализации.
Известны способы видения объектов, включающие подсветку сектора пространства, в котором разыскивается объект, зондирующим импульсным лазерным излучением не менее одного раза за период наблюдения и регистрацию посредством приемника с широким полем обзора [В.Е. Карасик, В.М. Орлов. Лазерные системы видения. М.: МГТУ им. Н.Э. Баумана, 2001, с.46-53, Атнашев В.Б. Способ видения объектов с помощью лазерной подсветки и устройство для его осуществления (RU 2205426, G01S 17/00, G02B 23/10, от 26.07.2002)].
Наиболее близким по технической сущности к заявляемому изобретению является способ видения подводных объектов и устройство для его реализации (RU 2397510 C2, G01S 17/88, от 07.07.2008).
Данный способ измерения включает автоматически управляемые сканирование подводных объектов зондирующим лазерным излучением с узкой диаграммой направленности в спектральной области прозрачности воды, подавление помехи обратного рассеяния, регистрацию интенсивности излучения, отраженного от различных точек поверхности объекта, посредством приемника с широкой диаграммой направленности, восстановление образа объекта, при этом поверхность объекта попиксельно сканируют по двум координатам импульсно-периодическим лазерным излучением с частотой не менее 2.5 МГц и длительностью импульса не более 2 нс с возможностью изменения угла обзора от 2 до 25°, помеху обратного рассеяния подавляют оптической поляризационной фильтрацией полезного сигнала и стробированием фотоприемного устройства, при предварительной обработке зарегистрированного отраженного сигнала дополнительно снижают влияние прямого рассеяния, а восстановление двумерного образа объекта осуществляют со скоростью не менее 8 кадров в секунду и при разрешении не менее 512×512 пикселей.
Недостатком рассмотренных способов является высокое энергопотребление источника излучения вследствие применения классической процедуры принятия решений. К недостаткам вышеприведенных способов следует также отнести отсутствие средств борьбы с помехой обратного рассеяния на малых дистанциях, где максимум помехи обратного рассеяния приходится на момент обнаружения сигнала, а значит, временное стробирование приемника использовать нельзя.
Известно обзорное устройство, описанное в патенте (RU 2129287, G01S 17/00, от 05.02.1998), позволяющее обнаруживать как оптические, так и диффузно-отражающие объекты. Устройство содержит объектив, электронно-оптический преобразователь (ЭОП), фотоприемник с объективом, визирное видеоконтрольное устройство, блок обработки сигналов, блок затворных импульсов, импульсные источники напряжения, синхронизатор, частотно-импульсный лазер с объективом, модулятор тока накачки частотно-импульсного лазера, делитель кадровой частоты, схему автоматической регулировки усилений и пульт управления.
К недостаткам устройства можно отнести то, что в связи с наличием в устройстве ЭОПа используется режим накопления сигналов, что приводит к накоплению фоновых шумов и, соответственно, к снижению потенциала системы, снижению помехозащищенности, к необходимости использования повышенной частоты и повышенной средней мощности лазерных импульсов, т.е. повышению потребляемой мощности.
Из уровня техники известно оптико-электронное локационное устройство, описанное в патенте (RU 2304792 C1, G01S 17/00, от 14.12.2005), которое по совокупности признаков является наиболее близким к заявляемому изобретению и может быть принято за прототип. Устройство содержит фотоприемник с размещенным перед ним приемным объективом, первый импульсный полупроводниковый лазер, перед которым установлен первый передающий объектив, первый управляемый модулятор, выход которого соединен с управляющим входом первого полупроводникового лазера, а вход - с первым выходом синхронизатора, схему автоматической регулировки усиления (АРУ), пульт управления и визирный канал, при этом в устройство введены второй импульсный полупроводниковый лазер, перед которым установлен второй передающий объектив, второй управляемый модулятор, включенный между вторым выходом синхронизатора и управляющим входом второго импульсного полупроводникового лазера, последовательно соединенные усилитель фототока, вход которого подключен к выходу фотоприемника, выполненного на базе лавинного фотодиода (ЛФД), управляемый частотный корректор, адаптивный пороговый обнаружитель и селектор сигналов, измеритель временного сдвига, входы которого соединены с выходом адаптивного порогового обнаружителя и третьим выходом синхронизатора, первый и второй генераторы низкой частоты, входы которых соединены соответственно с выходами селектора сигналов, а выходы - с соответствующими входами введенного сумматора, формирователь сигнала адаптации, первый и второй выходы которого соединены соответственно с входом порогового сигнала адаптивного порогового обнаружителя и управляющим входом частотного корректора, формирователь информационного сигнала, включенный между выходом измерителя временных сдвигов и входом введенного индикатора информационных сигналов, между выходом усилителя фототока и входом схемы АРУ включен введенный пороговый усилитель шумов, второй вход которого соединен с первым выходом пульта управления, формирователь управляющего напряжения, вход которого соединен с выходом схемы АРУ, первый выход - с входом порогового сигнала адаптивного порогового обнаружителя, а второй выход - с входом питания фотоприемника через введенный регулируемый источник питания, при этом второй, третий и четвертый выходы пульта управления соединены соответственно с управляющими входами формирователя сигналов адаптации, первого управляемого модулятора и второго управляемого модулятора, первый и второй выходы синхронизатора подсоединены соответственно к первому и второму синхронизирующим входам селектора сигналов, а четвертый выход синхронизатора соединен с синхронизирующим входом формирователя сигналов адаптации.
Основным недостатком указанного устройства является то, что его работа основана на классической процедуре принятия решений, при которой предельно малые энергопотребление источника излучения и габаритно-весовые характеристики устройства определяются величиной отношения сигнала к шуму µ=9 (для вероятностей ложной тревоги и пропуска объекта 10-4 и 10-2 соответственно).
Поэтому задачей настоящего изобретения является разработка нового способа обнаружения объекта на малых дистанциях и устройства для его осуществления, который бы обеспечивал достижение следующего технического результата - уменьшение требуемой энергии излучения источника и габаритно-весовых характеристик устройства.
Указанный технический результат достигается за счет того, что в способе обнаружения объекта на малых дистанциях, включающем подсветку сектора пространства, в котором разыскивается объект, зондирующим импульсным лазерным излучением не менее одного раза за период наблюдения, подавление помехи обратного рассеяния, регистрацию отраженного от поверхности объекта излучения в приемном канале, преобразование оптического сигнала в электрический и сравнение полученного электрического сигнала с пороговым уровнем, в момент пересечения которого снизу вверх с положительной производной принимают решение о нахождении объекта в подсвечиваемом секторе пространства, новым является то, что зондирующий импульс лазерного излучения формируют только в момент пересечения сигналом порогового уровня сверху вниз с отрицательной производной. Кроме того, зондирующий импульс лазерного излучения формируют в первый за период наблюдения момент пересечения сигналом порогового уровня сверху вниз.
В устройстве обнаружения объекта на малых дистанциях, содержащем импульсный полупроводниковый лазер, перед которым установлен передающий объектив, управляемый модулятор, выход которого соединен с управляющим входом полупроводникового лазера, а вход - с выходом синхронизатора, приемный канал, содержащий приемный объектив с размещенным за ним фотоприемником, выход которого соединен с входом усилителя, при этом выход приемного канала соединен со входом порогового устройства, являющимся информационным выходом устройства обнаружения, новым является то, что дополнительно введено второе пороговое устройство, выход которого соединен с входом синхронизатора, а вход соединен с выходом приемного канала.
Кроме того, приемный канал содержит как минимум один дополнительный комплект, состоящий из приемного объектива, с размещенным за ним фотоприемником, выход которого соединен с входом усилителя, при этом общее количество указанных комплектов должно быть кратно двум. При одном дополнительном комплекте, состоящем из приемного объектива, с размещенным за ним фотоприемником, выход которого соединен с входом усилителя, выход каждого усилителя приемного канала соединен с входом схемы вычитания, выход которой является выходом приемного канала. При трех и более дополнительных комплектах, состоящих из приемного объектива, с размещенным за ним фотоприемником, выход которого соединен с входом усилителя, выходы каждой пары усилителей соединены со входом схемы вычитания, количество которых равно половине от числа комплектов, при этом приемный канал дополнительно содержит сумматор, вход которого соединен с выходом каждой схемы вычитания, а выход является выходом приемного канала.
Заявителем проведен патентный поиск по данной теме, и заявляемая совокупность существенных признаков не выявлена.
Сущность изобретения поясняется чертежами.
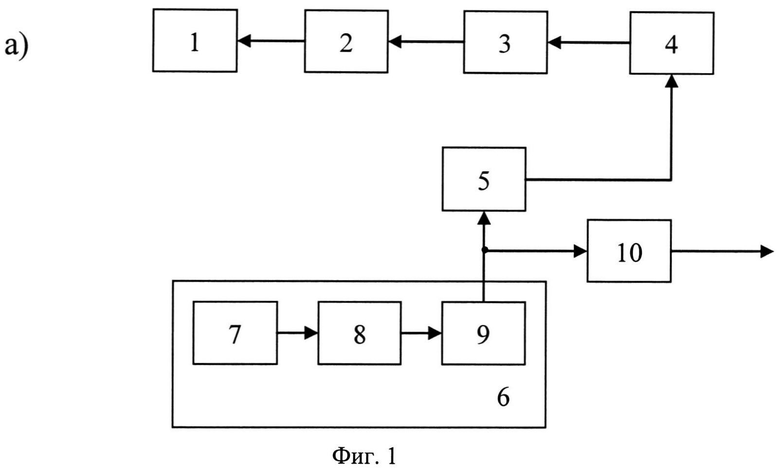
На фиг.1 приведена структурная схема устройства обнаружения объекта на малых дистанциях: 1 - передающий объектив, 2 - полупроводниковый лазер, 3 - управляемый модулятор, 4 - синхронизатор, 5 - второе пороговое устройство, 6 - приемный канал, 7 - приемный объектив, 8 - фотоприемник, 9 - усилитель, 10 - первое пороговое устройство.
На фиг.2 приведены временные диаграммы, поясняющие работу устройства: 11 - электрический сигнал на выходе приемного канала, 12 - управляющий сигнал на выходе синхронизатора, 13 - зондирующий импульс излучения полупроводникового лазера, 14 - электрический сигнал на информационном выходе устройства обнаружения, 15 - электрический сигнал, соответствующий отсутствию отраженного от поверхности объекта излучения (полезного сигнала), 16 - электрический сигнал, соответствующий отраженному от поверхности объекта излучению (полезному сигналу).
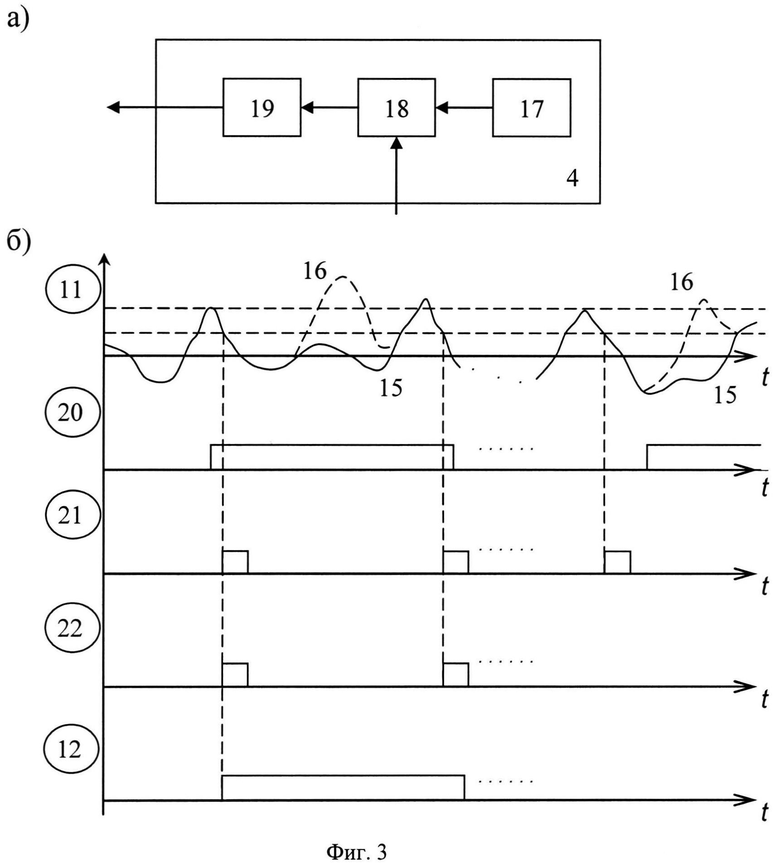
На фиг.3a показана возможная схема построения синхронизатора 4. Синхронизатор 4 содержит генератор тактовых импульсов 17, схему совпадения 18, одновибратор 19. На фиг.3б показаны временные диаграммы, поясняющие принцип работы синхронизатора 4: 20 - электрические импульсы на выходе генератора тактовых импульсов, 21 - электрический сигнал на выходе первого порогового устройства, 22 - управляющий импульс на выходе схемы совпадения.
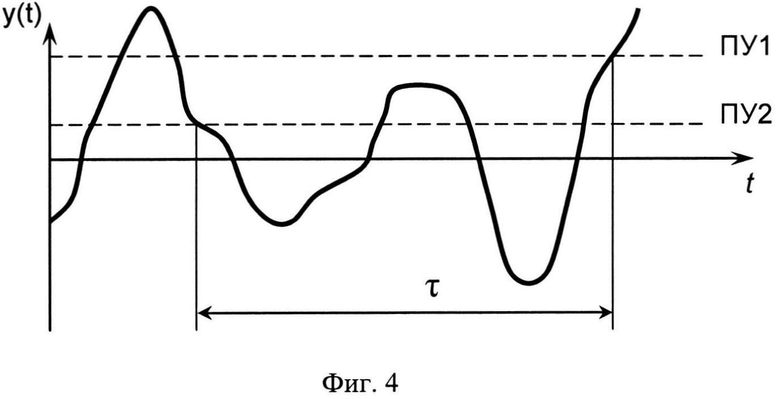
На фиг.4 приведена реализация случайного процесса на выходе приемного канала. На фигуре приняты следующие обозначения: y(t) - электрический сигнал на выходе приемного канала, t - шкала времени, ПУ1 - пороговый уровень первого порогового устройства, ПУ2 - пороговый уровень второго порогового устройства, τ - длительность интервала между выбросами случайного процесса на выходе приемного канала.
На фиг.5 приведены результаты расчета средней частоты f пересечения уровня C2 реализацией случайного процесса на выходе приемного канала 6 и сравнение расчетных данных с результатами, полученными экспериментально. По оси абсцисс отложена безразмерная величина относительного уровня C2/σ, где σ - среднее квадратичное значение электрического сигнала на выходе приемного канала в отсутствие полезного сигнала (СКО шума). На фигуре также использовано обозначение τИ - длительность зондирующего импульса излучения 13.
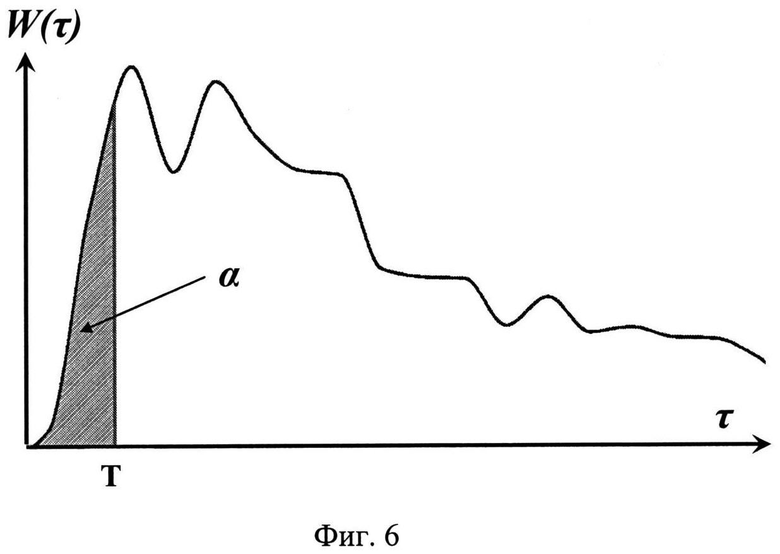
Фиг.7 поясняет процедуру определения вероятности ложной тревоги α, которая определяется как площадь под графиком плотности вероятности W(τ) длительности интервалов τ между выбросами случайного процесса на выходе приемного канала 6, ограниченная временем наблюдения T=2L/c, где L - дистанция до объекта, с - скорость света.
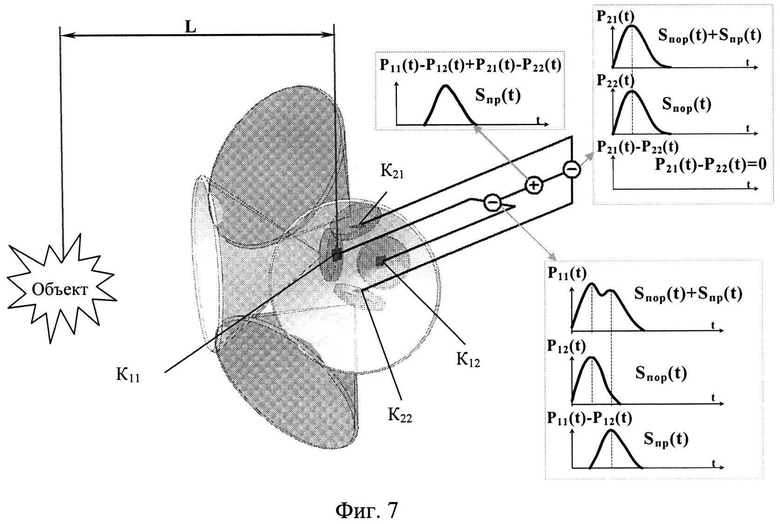
Фиг.8 поясняет принцип борьбы с помехой обратного рассеяния при использовании трех дополнительных комплектов из приемного объектива 7, фотоприемника 8 и усилителя 9 в приемном канале 6. На фигуре приведены следующие обозначения:
K11 K12, K21, K22 - комплекты приемного канала 6.
P11(t)-P22(t) - мощность сигнала 11 на выходе усилителя 9 каждого комплекта приемного канала 6 соответственно.
Sпр(t) - электрический сигнал на выходе усилителя 9, вызванный зондирующим излучением 13, отраженным от поверхности объекта,
Sпор(t) - электрический сигнал на выходе усилителя 9, вызванный помехой обратного рассеяния.
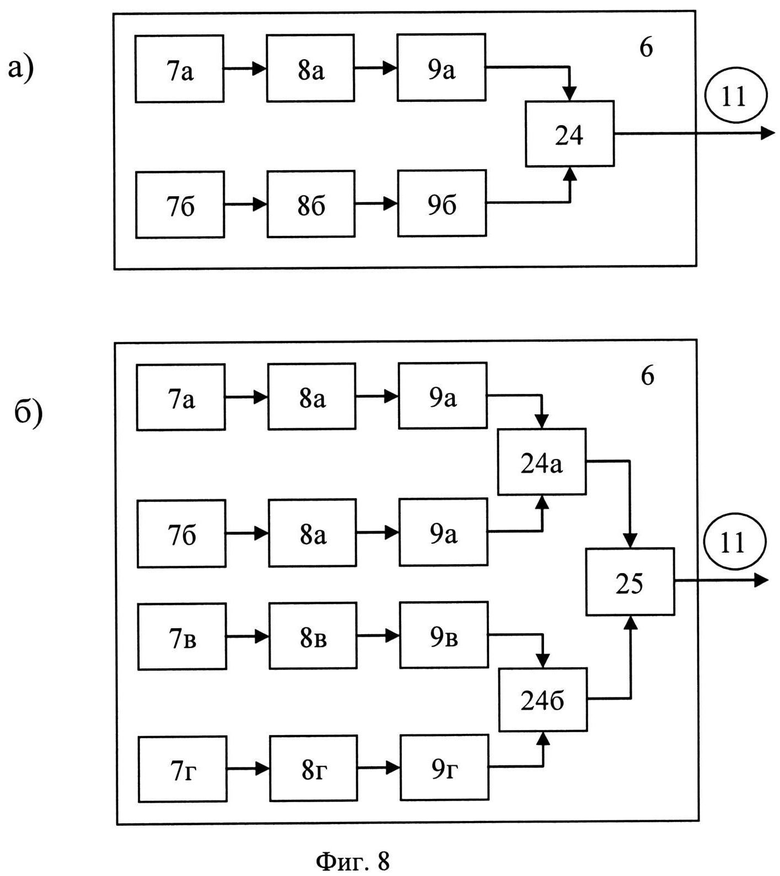
На фиг.7a в составе приемного канала 6 показан один дополнительный комплект (литера б), состоящий из приемного объектива 7б, фотоприемника 8б, усилителя 9б. Выходом приемного канала 6 в этом случае является выход схемы вычитания 24, осуществляющей выделение электрического сигнала Sпр(t) из смеси Sпр(t)+Sпор(t).
На фиг.7б показан приемный канал 6 с тремя дополнительными комплектами (литеры б, в, г). В этом случае для корректного выделения электрического сигнала Sпр(t) выходы парных комплектов, состоящих из поз.7-9, соединены с соответствующей схемой вычитания 24, выход каждой из которых соединен с сумматором 25.
Устройство работает следующим образом.
Передающий объектив 1 (фиг.1) расположен перед полупроводниковым лазером 2, частота излучения которого варьируется управляемым модулятором 3. На вход модулятора поступают управляющие импульсы от синхронизатора 4, который, в свою очередь, подключен к выходу второго порогового устройства 5. Приемный канал 6 устройства содержит приемный объектив 7, расположенный перед фотоприемником 8. Фотоприемник 8 преобразует формируемое приемным объективом 7 оптическое излучение в электрический сигнал, который затем усиливается усилителем 9. Усиленный электрический сигнал 11 поступает на два пороговых устройства: второе - 5 и первое - 10.
При пересечении электрическим сигналом 11 (фиг.2) уровня срабатывания второго порогового устройства 5 синхронизатор 4 вырабатывает управляющий сигнал 12, запускающий управляемый модулятор 3, который, в свою очередь, формирует в зондирующий импульс излучения 13 полупроводникового лазера 2. Отраженный от объекта зондирующий импульс 13 детектируется приемным каналом 6. При превышении электрическим сигналом 11 уровня срабатывания первого порогового устройства 10 принимают решение о наличии в поле зрения приемного канала 6 объекта, в результате формирования электрического сигнала 14 на информационном выходе устройства обнаружения.
При этом синхронизатор 4 может быть реализован следующим образом (фиг.3). Генератор тактовых импульсов 17 формирует следующие с одинаковым периодом электрические импульсы 20, поступающие на первый вход схемы совпадения 18, на второй вход которой поступает электрический сигнал 21 с выхода второго порогового устройства 5. При срабатывании схемы совпадения 18 на ее выходе формируется управляющий импульс 22, поступающий на вход одновибратора 19, формирующий управляющий сигнал 12 на выходе синхронизатора 4.
Технический результат достигается за счет того, что прием отраженного от объекта зондирующего излучения 13 производится на интервале τ между двумя выбросами электрического сигнала 11 на выходе приемного канала 6. При этом интервал между выбросами (фиг.4) определяется в данном случае как промежуток времени между последовательными пересечениями сначала более низкого второго порогового уровня ПУ2 сверху вниз, а затем более высокого первого порогового уровня ПУ1 снизу вверх (фиг.4). При этом при обозначенных пересечениях порогового уровня ПУ2 производится формирование зондирующего импульса излучения 13 синхронизатором 4 и управляемым модулятором 3 (фиг.1, 2, 3). Количество зондирующих импульсов может регулироваться путем изменения длительности импульса одновибратора 19, блокирующим совместно с схемой совпадения 18 и генератором тактовых импульсов 17 нежелательные включения полупроводникового лазера 2 (фиг.3). Величина порогового уровня ПУ2 (фиг.4) второго порогового устройства 5 выбирается низкой, чтобы ускорить момент формирования первого за период наблюдения зондирующего импульса 13. Частота «свободных включений» (фиг.5) полупроводникового лазера 2 без блокировки совокупностью элементов 17-19 определяется приближенным выражением

где τИ - длительность зондирующего импульса, С2 - величина порогового уровня ПУ2 второго порогового устройства 5, σ - среднее квадратичное значение электрического сигнала 11 на выходе приемного канала 6 в отсутствие полезного сигнала.
Выражение (1) рассчитано для «белого» шума с нулевым средним значением для формы зондирующего импульса, заданной выражением

Вероятность ложной тревоги (фиг.6) в заявляемом способе определяется выражением
Вероятность пропуска объекта β за время наблюдения Т определяется выражением:

где s и σ - максимальное значение полезного сигнала на выходе приемного канала 6 и среднее квадратичное значение электрического сигнала 11 на выходе приемного канала 6 в отсутствие полезного сигнала соответственно,
C1 - величина порогового уровня ПУ1 первого порогового устройства 10,
Φ (z) - интегральная функция Лапласа.
Расчет и испытания показали, что вероятности ложной тревоги 10-4 и пропуска объекта 10-2 обеспечиваются при величине отношения сигнала к шуму µ1=5 при дистанции до объекта, не превышающей 15 метров, в то время как классическая процедура принятия решений обеспечивает заданную величину ошибок обнаружения только при µ2=9. Таким образом, заявляемая совокупность признаков позволяет снизить требуемую для надежного обнаружения объекта энергию излучения более чем в 
На дистанции, не превышающей 15 метров, временное стробирование использовать не удается, поскольку максимум помехи обратного рассеяния для таких дистанций приходится на время детектирования полезного сигнала, а мощность помехи сопоставима с мощностью полезного сигнала. Для повышения помехоустойчивости устройства заявляемая совокупность признаков содержит в приемном канале 6 дополнительные комплекты из приемного объектива 7, фотоприемника 8 и усилителя 9 (фиг.7 и 8).
Каждая пара комплектов в приемном канале 6 работает на соответствующую схему вычитания 24 (фиг.8). Таким образом, при работе в тумане, облачности, запыленности и т.д. сигналы обратного рассеяния Sпор(t) можно считать в каждом канале одинаковыми. Следовательно, на выходе схемы вычитания 24 будем иметь электрический сигнал, дисперсия которого равна сумме дисперсий шумов (темновых и фоновых) каждого из двух комплектов пары. При расположении комплектов, как показано на фиг.6, при наличии объекта в интегральном поле зрения устройства полезный сигнал Sпр(t) может появиться в поле зрения только одного приемного объектива 7. Таким образом, электрический сигнал 11 на выходе приемного канала 6 в этом случае можно с высокой вероятностью считать полезным сигналом. Указанное исполнение приемного канала 6 даже при сильной помехе обратного рассеяния позволит избежать ложных срабатываний, вызванных сигналом обратного рассеяния, а значит, обеспечить работоспособность заявляемой совокупности признаков на малых дистанциях.
Пример конкретного исполнения
Управляемый модулятор 3 и полупроводниковый лазер 2 могут быть выполнены в виде модулятора тока накачки частотно-импульсного лазера, пороговое устройство 10 - в виде компаратора, а пороговое устройство 5 - в виде компаратора с инверсным выходом. Фотоприемник 8 может быть выполнен в виде фотодиода, а усилитель 9 - на операционном усилителе. Генератор тактовых импульсов 17 может быть выполнен в виде кварцевого генератора, схема совпадения 18 - в виде логической схемы «И».
Таким образом, заявляемое изобретение обеспечивает достижение заявленного технического результата, а именно уменьшение требуемой энергии излучения источника и габаритно-весовых характеристик устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТОЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278399C2 |
| СПОСОБ ЗАЩИТЫ БРОНЕТАНКОВОЙ ТЕХНИКИ | 2008 |
|
RU2373482C2 |
| Способ неконтактного подрыва и неконтактный датчик цели | 2021 |
|
RU2771003C1 |
| УСТРОЙСТВО ДЛЯ ВИДЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2022 |
|
RU2794167C1 |
| Лазерный дальномер | 2021 |
|
RU2756381C1 |
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2004 |
|
RU2288449C2 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| Лазерный судовой измеритель скорости | 2018 |
|
RU2689273C1 |
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |

Изобретение относится к области обнаружения в пространстве объектов, к способам и устройствам лазерной локации и может быть использовано в системах обнаружения и распознавания целей, в системах предупреждения столкновения транспортных средств, в навигационных устройствах и в системах охранной сигнализации. Способ основан на подсветке сектора пространства зондирующим импульсным лазерным излучением не менее одного раза за период наблюдения. Производят подавление помехи обратного рассеяния и регистрацию отраженного от поверхности объекта излучения в приемном канале. Оптический сигнал преобразуют в электрический и сравнивают с пороговым уровнем. В момент пересечения порогового уровня снизу вверх с положительной производной принимают решение о нахождении объекта в подсвечиваемом секторе пространства. При этом зондирующий импульс формируют только в момент пересечения сигналом порогового уровня сверху вниз с отрицательной производной. Технический результат - уменьшение требуемой энергии излучения источника и габаритно-весовых характеристик устройства. 2 н. и 5 з.п. ф-лы, 8 ил.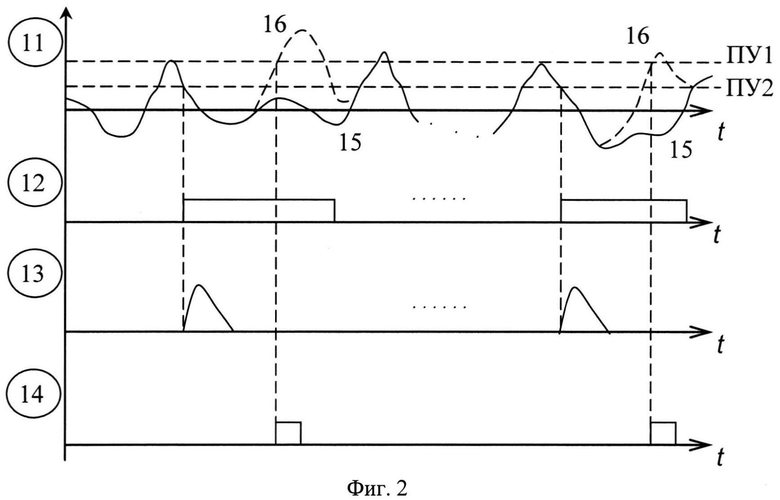
1. Способ обнаружения объекта на малых дистанциях, включающий подсветку сектора пространства, в котором разыскивается объект, зондирующим импульсным лазерным излучением не менее одного раза за период наблюдения, подавление помехи обратного рассеяния, регистрацию отраженного от поверхности объекта излучения в приемном канале, преобразование оптического сигнала в электрический и сравнение полученного электрического сигнала с пороговым уровнем, в момент пересечения которого снизу вверх с положительной производной принимают решение о нахождении объекта в подсвечиваемом секторе пространства, отличающийся тем, что зондирующий импульс лазерного излучения формируют только в момент пересечения электрическим сигналом дополнительного порогового уровня сверху вниз с отрицательной производной, устанавливая начало интервала ожидания пересечения электрическим сигналом порогового уровня, сигнализирующего о нахождении объекта в подсвечиваемом секторе пространства.
2. Способ обнаружения объекта на малых дистанциях по п. 1, отличающийся тем, что величина дополнительного порогового уровня меньше величины порогового уровня, в момент пересечения которого снизу вверх с положительной производной принимают решение о нахождении объекта в подсвечиваемом секторе пространства.
3. Способ обнаружения объекта на малых дистанциях по п. 1, отличающийся тем, что зондирующий импульс лазерного излучения формируют в первый за период наблюдения момент пересечения сигналом дополнительного порогового уровня сверху вниз.
4. Устройство обнаружения объекта на малых дистанциях, содержащее импульсный полупроводниковый лазер, перед которым установлен передающий объектив, управляемый модулятор, выход которого соединен с управляющим входом полупроводникового лазера, а вход - с выходом синхронизатора, приемный канал, содержащий приемный объектив с размещенным за ним фотоприемником, выход которого соединен с входом усилителя, при этом выход приемного канала соединен со входом порогового устройства, являющимся информационным выходом устройства обнаружения, отличающееся тем, что дополнительно введено второе пороговое устройство, выход которого соединен с входом синхронизатора, а вход соединен с выходом приемного канала.
5. Устройство обнаружения объекта на малых дистанциях по п. 4, отличающееся тем, что приемный канал содержит как минимум один дополнительный комплект, состоящий из приемного объектива, с размещенным за ним фотоприемником, выход которого соединен с входом усилителя, при этом общее количество указанных комплектов должно быть кратно двум.
6. Устройство обнаружения объекта на малых дистанциях по п. 5, отличающееся тем, что при одном дополнительном комплекте, состоящем из приемного объектива, с размещенным за ним фотоприемником, выход которого соединен с входом усилителя, выход каждого усилителя приемного канала соединен с входом схемы вычитания, выход которой является выходом приемного канала.
7. Устройство обнаружения объекта на малых дистанциях по п. 5, отличающееся тем, что при трех и более дополнительных комплектах, состоящих из приемного объектива, с размещенным за ним фотоприемником, выход которого соединен с входом усилителя, выходы каждой пары усилителей соединены со входом схемы вычитания, количество которых равно половине от числа комплектов, при этом приемный канал дополнительно содержит сумматор, вход которого соединен с выходом каждой схемы вычитания, а выход является выходом приемного канала.
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
| Устройство для моделирования и оценки статистических параметров | 1983 |
|
SU1173425A1 |
| US 5463211 A1, 31.10.1995 | |||
| US 6000616 A, 14.12.1999 | |||
| US 6616040 B1, 09.09.2003 | |||

