Изобретение относится к транспортному машиностроению и, в частности, может быть использовано в тракторах, самоходных машинах, автомобилях, полугусеничных тягачах и транспортерах.
Известна самоходная машина (патент СССР №1039746, МПК В60К 17/34, 1982 г.), содержащая привод дополнительного ведущего моста, который состоит из элемента скольжения, выполненного в виде дифференциала, одно звено которого соединено с вторичным валом коробки передач, второе звено через передачу с постоянным передаточным числом (карданный вал и главная передача) - с межколесным дифференциалом дополнительного ведущего моста, а реактивное звено соединено с валом насоса скольжения, в напорной магистрали которого установлен регулируемый дроссель, управляемый регулятором тягового усилия, в котором установлено сравнивающее устройство, один вход которого соединен с измерителем разности частоты вращения входного и выходного валов элемента скольжения, а второй - с измерителем крутящего момента на дополнительном мосту.
Указанное техническое решение является наиболее близким к заявленному по технической сущности и достигаемому результату. Однако недостатком данной самоходной машины является то, что величина передаваемого на дополнительный ведущий мост крутящего момента пропорциональна работе буксования движителя основного ведущего моста. Кроме того, при движении в обычных дорожных условиях крутящий момент, передаваемый на дополнительный ведущий мост, постоянен и, как правило, направлен только на преодоление сопротивления качению колес, что отрицательно сказывается на управляемости самоходной машины. К недостаткам привода дополнительного ведущего моста данной конструкции следует также отнести отсутствие адаптации процесса регулирования к переменным характеристикам системы «колесо - опорная поверхность», малый диапазон регулирования тягового усилия на дополнительном ведущем мосту, относительно малый КПД из-за потерь на дросселирование, зависимость параметров системы от радиусов качения колес дополнительного ведущего моста.
Технический результат изобретения направлен на повышение тягово-скоростных свойств машины и улучшение ее управляемости за счет гидродинамического регулирования соотношения тяговых усилий на ведущих мостах и рационального использования колесного и гусеничного движителей по сцеплению их с опорной поверхностью и увеличение ходимости гусеничного движителя, а также повышение КПД привода.
Технический результат достигается тем, что силовая передача транспортного средства, содержащая привод дополнительного ведущего моста, который состоит из элемента скольжения, выполненного в виде дифференциала, одно звено которого соединено с вторичным валом коробки передач, второе звено через передачу с постоянным передаточным числом (карданный вал и главная передача) - с межколесным дифференциалом дополнительного ведущего моста, при этом привод дополнительного ведущего моста снабжен гидродинамической передачей в виде 2-х регулируемых гидродинамических трансформаторов, насосные колеса которых приводятся во вращение от раздаточной коробки и имеют возможность отключения, а турбинные колеса, связанные с ведущими колесами гусеничного движителя, передают крутящий момент на вспомогательный гусеничный движитель в зависимости от положения лопаток реакторов, угол наклона которых изменяется с помощью регулирующего автоматического устройства, получающего сигналы от датчиков, регистрирующих текущее значение крутящего момента, установленных на валах привода колесного движителя.
Отличительными признаками от прототипа является то, что привод дополнительного ведущего моста снабжен гидродинамической передачей в виде 2-х регулируемых гидродинамических трансформаторов, насосные колеса которых приводятся во вращение от раздаточной коробки и имеют возможность отключения, а турбинные колеса, связанные с ведущими колесами гусеничного движителя, передают крутящий момент на вспомогательный гусеничный движитель в зависимости от положения лопаток реакторов, угол наклона которых изменяется с помощью регулирующего автоматического устройства, получающего сигналы от датчиков, регистрирующих текущее значение крутящего момента, установленных на валах привода колесного движителя.
На чертеже дана принципиальная схема транспортного средства с предлагаемой силовой передачей.
Силовая передача транспортного средства содержит двигатель 1, коробку передач 2, раздаточную коробку 3, имеющую четыре выходных вала, два из которых предназначены для передачи крутящего момента на передний (4) и задний (5) мосты колесного движителя, два - для привода насосных колес регулируемых гидродинамических трансформаторов 6 и 7, турбинные колеса которых связаны с валами привода левого (8) и правого (9) ведущих колес гусеничного движителя. На валах привода колесного движителя установлены датчики 10, связанные с регулирующим автоматическим устройством 11.
Работает силовая передача следующим образом. Крутящий момент от двигателя 1 через коробку передач 2 передается на раздаточную коробку 3, которая распределяет его между ведущими мостами 4 и 5 колесного движителя и насосными колесами регулируемых гидродинамических трансформаторов 6 и 7, турбинные колеса которых связаны с ведущими колесами 8 и 9 гусеничного движителя. При этом реакторы гидротрансформаторов имеют возможность изменять угол наклона лопаток в зависимости от управляющих сигналов регулирующего автоматического устройства 11, получающего информацию о текущих значениях реализуемого крутящего момента от датчиков 10, установленных на валах привода колесного движителя.
При движении машины по недеформируемой опорной поверхности в условиях хорошего сцепления колес с дорогой регулирующее автоматическое устройство 11 устанавливает лопатки реакторов гидротрансформаторов 6 и 7 таким образом, что на ведущие колеса 8 и 9 гусеничного движителя передается крутящий момент, достаточный только для перематывания гусеничной цепи.
При движении машины в условиях плохого сцепления колес с опорной поверхностью в случае буксования колесного движителя сигнал о снижении значений реализуемого крутящего момента с датчиков, установленных на валах привода соответствующих колес колесного движителя, поступает на регулирующее автоматическое устройство 11, которое посредством управляющих команд обеспечивает поворот лопаток реакторов соответствующих гидротрансформаторов на определенный угол, увеличивая тем самым значение коэффициента трансформации. При этом крутящий момент на турбине, а следовательно, и на соответствующем ведущем колесе гусеничного движителя, будет плавно увеличиваться до тех пор, пока не прекратиться буксование колесного движителя.
Это позволяет согласовать работу колесного и гусеничного движителей и наиболее рационально распределять крутящий момент между ними, а также регулировать величину крутящего момента на движителях в зависимости от условий движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДИНАМИЧЕСКИМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА КОЛЕСНО-ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2004 |
|
RU2276019C1 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДИНАМИЧЕСКИМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА КОЛЕСНО-ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2003 |
|
RU2292271C2 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРООБЪЕМНЫМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА ВСПОМОГАТЕЛЬНЫЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2003 |
|
RU2293030C2 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРОМЕХАНИЧЕСКИМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА КОЛЕСНО-ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2007 |
|
RU2340474C1 |
| ГИДРОТРАНСФОРМАТОР ГИДРОМЕХАНИЧЕСКОЙ ПЕРЕДАЧИ ДЛЯ РАЗДЕЛЬНОГО ПРИВОДА ВЕДУЩИХ МОСТОВ КОЛЕСНОГО ДВИЖИТЕЛЯ | 2022 |
|
RU2788351C1 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОАВТОМАТИЧЕСКИМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА КОЛЕСНО-ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2517025C2 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С РЕГУЛИРУЕМОЙ ВЕЛИЧИНОЙ КИНЕМАТИЧЕСКОГО РАССОГЛАСОВАНИЯ | 2002 |
|
RU2291064C2 |
| Самоходная машина | 1990 |
|
SU1712201A1 |
| Гидротрансформатор | 2021 |
|
RU2761683C1 |
| АВТОМАТИЧЕСКИЙ РЕДУКТОР ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2056557C1 |
Изобретение относится к транспортному машиностроению и может быть использовано в тракторах, самоходных машинах, автомобилях, полугусеничных тягачах и транспортерах. Силовая передача содержит двигатель 1, коробку передач 2, раздаточную коробку 3 передний 4 и задний 5 мосты колесного движителя, гидродинамические трансформаторы 6 и 7, датчики 10, связанные с регулирующим автоматическим устройством 11. Крутящий момент от двигателя 1 через коробку передач 2 передается на раздаточную коробку 3, которая распределяет его между ведущими мостами 4 и 5 и насосными колесами регулируемых гидродинамических трансформаторов 6 и 7, турбинные колеса которых связаны с ведущими колесами 8 и 9 гусеничного движителя. Реакторы гидротрансформаторов изменяют угол наклона лопаток в зависимости от управляющих сигналов регулирующего автоматического устройства 11, получающего информацию о текущих значениях реализуемого крутящего момента от датчиков 10, установленных на валах привода колесного движителя. Технический результат заключается в повышении тягово-скоростных свойств машины, улучшении ее управляемости и повышении КПД привода. 1 ил.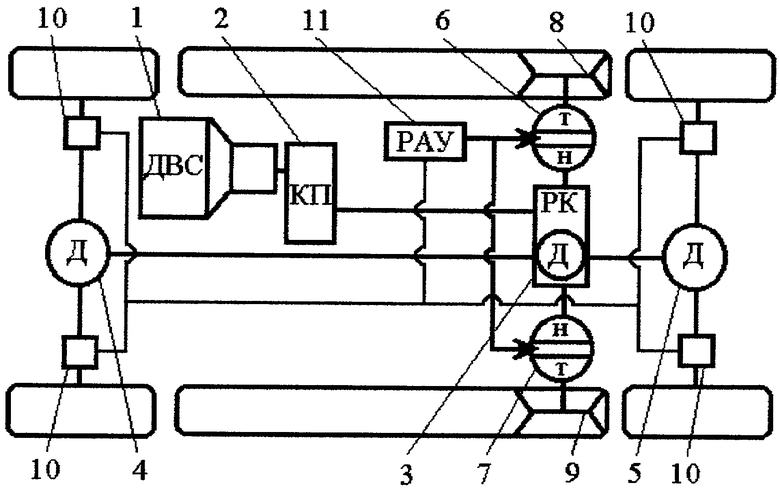
Силовая передача транспортного средства, содержащая привод дополнительного ведущего моста, который состоит из элемента скольжения, выполненного в виде дифференциала, одно звено которого соединено с вторичным валом коробки передач, второе звено через передачу с постоянным передаточным числом (карданный вал и главная передача) - с межколесным дифференциалом дополнительного ведущего моста, отличающаяся тем, что привод дополнительного ведущего моста снабжен гидродинамической передачей в виде двух регулируемых гидродинамических трансформаторов, насосные колеса которых приводятся во вращение от раздаточной коробки и имеют возможность отключения, а турбинные колеса, связанные с ведущими колесами гусеничного движителя, передают крутящий момент на вспомогательный гусеничный движитель в зависимости от положения лопаток реакторов, угол наклона которых изменяется с помощью регулирующего автоматического устройства, получающего сигналы от датчиков, регистрирующих текущее значение крутящего момента, установленных на валах привода колесного движителя.
| Самоходная машина и ее варианты | 1982 |
|
SU1039746A1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ ПРИВОДА КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2040411C1 |
| GB 1293921 А, 25.10.1972. | |||

