го значения, заданного поворотом колес 4 и 5 прицепа. Управление тор-
мозными механизмами 12 ся датчиком 13.угла Ч
осуществляет
,- t
ным в сцепке 3. При включаются тормозны борта, а при увелич
установлен- 2 с.п. ф-лы, 4 ил.
t
ным в сцепке 3. При уменьшении Ч включаются тормозные механизмы левого борта, а при увеличении - правого.
2 с.п. ф-лы, 4 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЙ КОЛЕСНЫХ ТРАНСПОРТНЫХ СРЕДСТВ И ДИНАМОМЕТРИЧЕСКИЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2087890C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ ДОРОЖНОГО ПОКРЫТИЯ | 2016 |
|
RU2616018C1 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2001 |
|
RU2232490C2 |
| Тормоз наката с устройством стабилизации прямолинейного движения одноосного прицепа | 2024 |
|
RU2825212C1 |
| Одноосный прицеп | 1983 |
|
SU1129097A1 |
| ТРАНСПОРТНЫЙ АГРЕГАТ | 2021 |
|
RU2775960C1 |
| АВТОПОЕЗД С ЭЛЕКТРОДИНАМИЧЕСКИМ УСТРОЙСТВОМ СТАБИЛИЗАЦИИ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ ПРИЦЕПА | 2024 |
|
RU2832365C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТОРМОЗНЫХ СИЛ НА КОЛЕСАХ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2028227C1 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| Способ управления движением активного многозвенного транспортного средства и устройство для его осуществления | 1982 |
|
SU1094790A1 |
Изобретение относится к испытаниям транспортных средств , в частности, к испытаниям автомобилей и шин в дорожных условиях. Цель изобретения - повышение точности и достоверности оценки управляемости и устойчивости транспортного средства за счет определения запасов управляющих и стабилизирующих реакций для любых заданных условий движения, повышение точности и сокращение длительности испытаний путем стабилизации движения на режиме замера. Транспортное средство 14 (ТС) устанавливается внутри рамы 1 динамометрического прицепа и связывается с дополнительной рамой шарнирами 11, обеспечивающими задание продольного крена. Поперечный крен ТС задается в шарнире 10, а разворот - поворотом колес 4 и 5 прицепа. Направляющие 6 обеспечивают вертикальную степень свободы и качения ТС под собственной весовой нагрузкой. Измерение силовых реакций ТС осуществляется динамометрическими звеньями, установленными в шарнирах 10 и 11 и механизмах задания продольного и поперечного кренов. В процессе принудительного перемещения по заданной траектории тягачом 2 динамометрического прицепа с ТС движение стабилизируется за счет автоматического избирательного включения тормозных механизмов 12 одного из бортов динамометрического прицепа при отклонении угла α от начального значения, заданного поворотом колес 4 и 5 прицепа. Управление тормозными механизмами 12 осуществляется датчиком 13 угла α, установленным в сцепке 3. При уменьшении α включаются тормозные механизмы левого борта, а при увеличении - правого. 2 с.п.ф-лы, 4 ил.
Изобретение относится к испытаниям наземных транспортных средств в целом или его движителей в отдельности.
Цель изобретения - повьппение точности и достоверности оценки управляемости и устойчивости транспортного средства за счет определения запасов управляющ1гх и стабилизирующих реакций для любых заданных условий движения и повышение точности и сокращение длительности испытаний путем стабилизации движения на режиме замера.
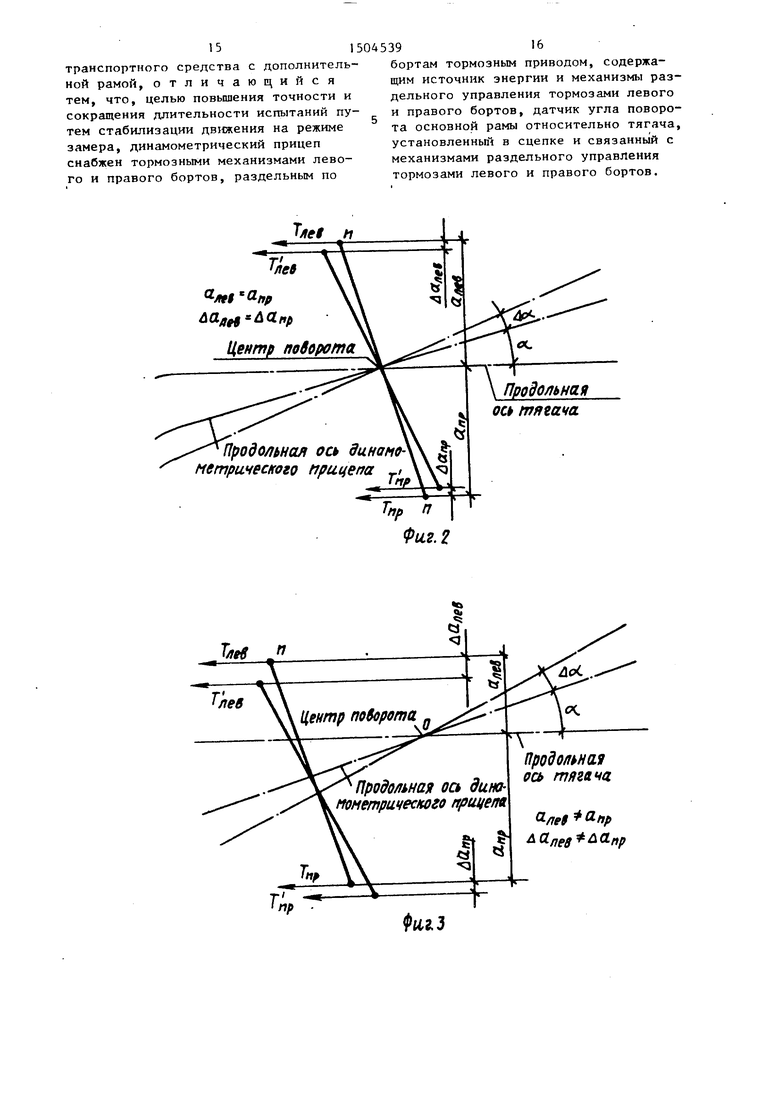
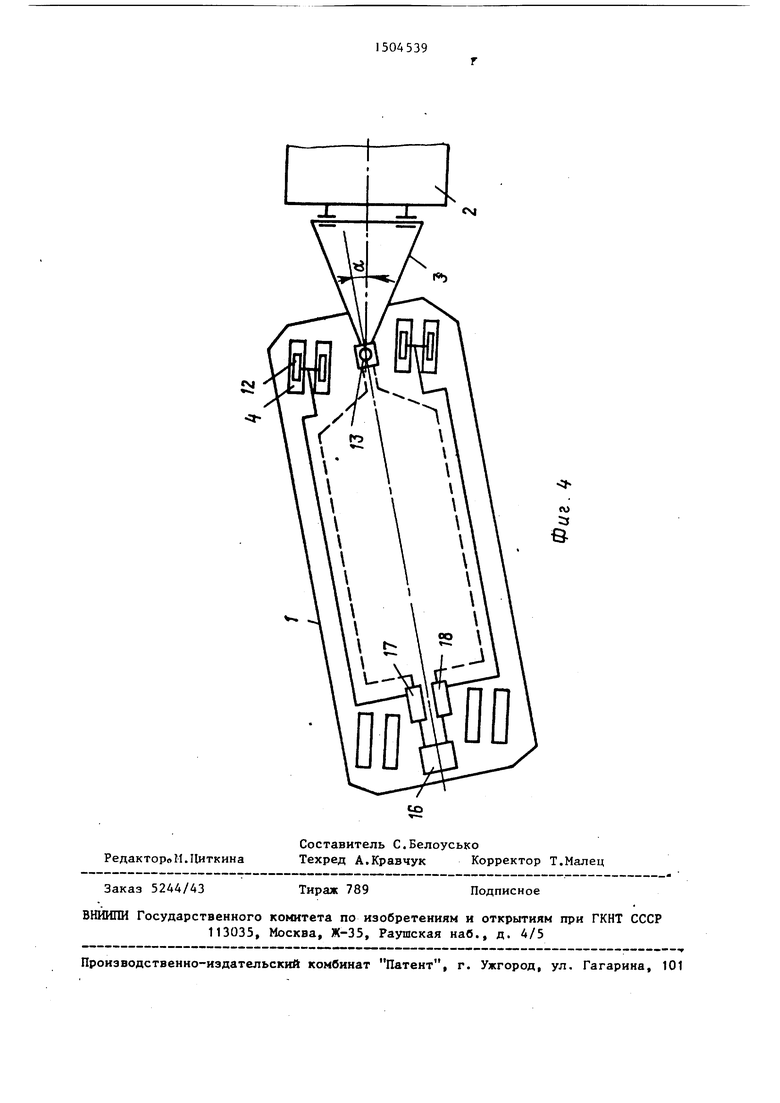
На фиг.1 изображено устройство для осуществления предлагаемого способа, вид сверху; на фиг.2 - график определения стабилизирующих эффектов, создаваемых избирательным торможением колес динамометрического прицепа на одном режиме замераJ на фиг.З - то же, на другом режиме; на фиг.4 - .прицеп с устройством стабилизации.
Устройство содержит основную раму 1, связанную с тягачом 2 при помощи сцепки 3, передние 4 и задние 5 колеса, установленные на основной ра- ме 1 с возможностью поворота, дополнительную раму, включающую верти- кальные направляющие 6, поперечины 7 и 8, лонжероны 9, шарнир 10 попереч- ного крена, шарниры 11 продольного крена, тормозные механизмы 12, датчик 13 угла поворота основной рамы 1 относительно тягача 2, механизмы изменения и фиксации пространственного положения (продольный и попереч- ньй крен) транспортного средства 14 относительно основной рамы 1 (не показаны) , механизмы изменения и фиксации угла между продольными осями основной рамы 1 и тягача 2 (не пока- заны), механизмы измерения силовых реакций транспортного средства (не показаны).
Устройство дополняется балластом 15, установленным на раме 1. Пространственное положение транспортного средства относительно выбранной траектории движения определяется тремя углами: продольйым креном/i,
поперечным креном и разворотом Х- в горизонтальной плоскости.
Угол продольного крена уЗ задается поворотом транспортного средства 14 относительно лонжеронов 9 в шарнирах 11, Угол поперечного крена (/ задается поворотом транспортного средства 14 совместно с лонжеронами и поперечиной 8 относительно поперечины 7 н шарнире 10. Угол разворота oL задается поворотом передних 4 и задних 5 колес устройства.
В качестве механизмов изменения и фиксации углов }Ь , и « могут быт использованы гидроцилиндры, винтовые пары и т.п. В качестве механизмов измерения силовых реакций могут быть использованы известные динамо мет- рические звенья: тензобалка,тонкостенный тензоцилиндр, гидроцилиндр с датчиком давления и т.д.
Суммарную продольную реакцию R транспортного средства измеряют динамометрическим звеном, установленным по оси шарнира 10. Суммарную поперечную реакцию Ry измеряют динамометрическими звеньями,установленными по осям шарниров 11. Создаваемый транспортным средством момент М относительно вертикальной оси измеряют динамометрическими звеньями, установленными между шарнирами 11 и лонжеронами 9 перпендикулярно осям шарниров 11. Создаваемые транспортным среством моменты М и My относительно продольной и поперечной осей измеряют динамометрическими звеньями, установленными в механизмах изменения и фиксации углов f н f .
Направляющие 6 независимо от величин углов крена /) и обеспечивают транспортному средству 14 вертикальную степень свободы, что исключает разгрузку или вертикальное догружение транспортного средства со стороны устройства.
Балласт 15 обеспечивает устройству необходимые сцепные качества для восприятия силовых реакций транспорт тюго средства без бокового скольже-
ния колес 4 и 5 устройства на любых режимах движения, включая критические.
Тормозные механизмы 12 снабжены индивидуальным независимым тормозным приводом для левого и правого бортов. Управление включением тормозных механизмов 12 осуществляется датчиком 13 при отклонении угла о (фиг.1) от первоначально установленного з начения. При уменьшении угла tL датчик 13 включает тормозные механизмы левого борта, а при увеличении угла 0 - тормозные механизмы правого борта. За счет этого создаются знакопеременные стабилизирующие эффекты, обеспечивающие минимальные колебания угла d. при действии внешних возмущающих факторов.
Включение тормозных механизмов 12 осуществляется на режиме замера. Заданная скорость движения поддерживается тягачом 2.
Эффективность системы стабилизации 25 речный крен задается поворотом транс- зависит от взаимного положения тормоз- портного средства 14 совместно с лонных механизмов 12 и центра О поворо- жеронами 9 и поперечиной 8 в шарни- та основной рамы 1 относительно тягача 2 (фиг.2,3). Стабилизирующий
30
эффект MCJ-, создаваемый каждым тор- мозньм механизмом, определяется тормозной силой Т и плечом а относительно центра поворота:
рс 10.
Пространственное положение основной рамы 1 относительно тягача 2 (угол oi. ) задают и Аиксируют поворотом nepeAHjrx 4 и задних 5 колес динамического прицепа. Посксшьку масса динамометрического прицепа с балластами 15 значительно превьппает массу испытуемого транспортного средства 14, пространственное положение основной рамы 1 при движении определяется углом поворота колес 4 и 5 прицепа независимо от величин силовых реакций транспортного средМ Т ет
а.
Если прямая, соединяющая точки пр ложения тормозных сил одной оси, проходит через центр поворота О (фИг.2), то стабилизирующие эффекты. Создаваемые левыми и правыми тормоз ными механизмами, будут одинаковььми, независимо от начального значения «i и величины отклонения а i. .
М
f.t МСТ.ПР
ПР
cr.Af АЕв te I tT.nP nr
Если указанное условие не выполняется (фиг.З), то равные тормозные силы левого и правого механизмов будут создавать различные стабилизирующие эффекты в зависимости от величины oi. И AJ: :
т.
ПР tr rtte
it М
ст. пр
Условие нахождения центра поворота (динамометрического прицепа относительно тягача) на прямой, соединяющей точки приложения тормозных сил, не является обязательным, однако пред
почтительн.о, так как н этом случае эффективность системы стабилизации не зависит от величины о( и A«i ,
Предлагаемый способ реализуется следующим образом.
Транспортное средство 14 устанавливают внутри основной рамы 1 динамического прицепа и связывают шарнирами 11 с дополнительной рамой. Направляющие 6 обеспечивают транспортному средству совместно с дополнительной рамой вертикальную степень свободы, что дает возможность само- стоя-тельного качения транспортного средства по опорной поверхности под собственной весовой нагрузкой.
Механизмами изменения и фиксации пространственного положения транспортного средства 14 относител15но основной рамы 1 задают ификсируют продолы1ьв( (у) и поперечньпЧ () крон-.Продольный крен задается поворотом транспортного средства 14 Р шарнирах 11. Попе
речный крен задается поворотом транс- портного средства 14 совместно с лонжеронами 9 и поперечиной 8 в шарни-
рс 10.
Пространственное положение основной рамы 1 относительно тягача 2 (угол oi. ) задают и Аиксируют поворотом nepeAHjrx 4 и задних 5 колес динамического прицепа. Посксшьку масса динамометрического прицепа с балластами 15 значительно превьппает массу испытуемого транспортного средства 14, пространственное положение основной рамы 1 при движении определяется углом поворота колес 4 и 5 прицепа независимо от величин силовых реакций транспортного сред-
50
v J oi воздейств 1ями на органы управления транспортного сред- 45 ства 14 (например, пово)отом управляемых колес на угол (У ) .
Далее задают и фиксируют величины воздействий на органы управления транспортного средства 14. Таковыми являются: поворот рулевого колеса, управление двигателем, трансмиссией, тормозами.
После перечисленных пьш1е предварительных операций осу1чествляют с помощью тягача 2 принудительное пере- мещени е динамометрического прицепа с установленным в нем транспортным средством 14 по заданной траектории,, например пpямoлинeйt oй, и одновре55
менно г помощью динамометрических звеньев измеряют силовые реакции транспортного средства 14.
Суммарную продольную реакцию R, измеряют динамометрическим -звеном, установленным по оси шарнира 10. Суммарную поперечную реакцию КуИз- меряют динамометрическими знаньями, установленными по осям шарниров 11. Суммарный момент М, относительно вертикальной оси транспортного средства 1А измеряют динамометрическими звеньями, установленными между шарнирами 11 и лонжеронами 9 в направле- НИИ, перпендикулярном осям шарниров 11. Cy lapньre моменты М и My относительно продольной и поперечной осей транспортного средства 14 измеряют динамометрическими звеньями, уста- новленными в механизмах изменения и фиксации углов крена f- и /
В процессе принудительного перемещения тягачом 2 динамометрического прицепа с транспортным средством 14 осутцествляют стабилизацию движе- ния системы тягач-динамометрический прицеп-транспортное средство на ре- жиме замера. Стабилизацию осуществляют путем автоматического изби- рательного включения тормозных механизмов 12 одного из бортов динамометрического прицепа. Управление включением тех или иных тормозных механизмов осуществляют датчиком 13, установленным в сцепке , реагирующим на отклонение угла J от начального значения, заданного поворотом колес 4 и 5. При уменьшении угла « (фиг.1) датчик 13 включает тормоз- ные механизмы левого борта, а при увеличении - тормозные механизмы правого борта. Эт1гм обеспечивают знакопеременные стабилизирующие э(}х})ек- ты, направленные на удержание началь ного значения угла oL с минимальными отклонениями U «Х независимо от причин, вызывающих эти отклонения. Заданая скорость дви:жения поддерживается тягачом 2. .
Осуществление предлагаемого способа и устройства в сравнении с известными обеспечивает получение следующих положительных эффектов.
Во-первых, независимое избиратель ное торможение колес левого и правого борта динамометрического прицепа на режиме замера является эффектив- -редгтиом стабилизации движения.
предохраняющим динамометрический прицеп от неизбежных поперечных колебаний относительно траектории движения Указанная стабилизация позволяет существенно повысить точность измерения силовых реакций транспортного средства (или его движителей в отдель ности) а также сократить длительность испытаний за счет меньшего времени выхода на режим замера и сокращения потребной длительности каждого замера. Во-вторых, предлагаемый способ и устройство существенно расширяют область режимов, на которых производится оценка свойств транспортных средств, за счет включения критических режимов движения, характеризующихся началом бокового скольжения, опрокидывания или потери управляемости. В обычных условиях выход на критический режим движения означает прекращение испытаний из-за нестабильности критических режимов и опасности повреждения транспортного средства вследствие опрокидывания или выхода за пределы испытательного участка. В предлагаемом способе с помощью динамометрического прицепа задают и фиксируют пространственное положение транспортного средства относительно траектории движения, что позволяет получить любые интересующие сочетания параметров движения и дает конструктору дополнительные сведения о свойствах транспортного средства на критических и за критическими режимами движения.
В-третьих, предлагаемый способ и устройство позволяют определять и разделять запасы управляющих и стабилизирующих реакций транспортного средства для любых наперед заданных условий движения. Это обстоятельство является весьма важным. Накопленный опыт в области управляемости и устойчивости движения наземных транс- nopTHf.ix средств показывает, что безопасность движения определяется не столько сложностью конкретных условий движения, сколько удаленностью управляющих и стабилизирующих факторов от своих предельных значений, т.е. величинами запасов управляющих и стабилизирующих реакций транспортного средства.
Разделение и определение запасов управляющих и стабилизирующих реакций транспортного средства в предлавыполняют следующим
гаемом способе образом.
Предварительно экспериментальным или расчетным путем определяют значния углов крена Д, (f , угла разворота ei , а также угла поворота управляемых колес S o (фиг.1) и других воздействий на органы управления транспортного средства,соответствующих заданным условиям движения.
Устанавливают транспортное средство внутри динамометрического прицепа с возможностью вертикального перемещения относительно рамы прицепа и самостоятельного качения по опорной поверхности.
Задают и фиксируют углы продоль- ногоУдИ поперечного крена транспортного средства относительно основной рамы прицепа.
Задают и фиксируют угол разворота oi о между продольными осями тягача и основной рамы прицепа.
Задают и фиксируют угол поворота Ос управляемых колес транспортного средства.
Перемещают принудительно с помощью тягача динамометрический прицеп с установленным в нем транспортным средством по заданной траектории,например прямолинейной.
Осуществляют в процессе перемещения избирательное торможение по крайней мере одного колеса одного из бортов динамометрического прицепа при оклонении угла oL между продольными осями тягача и прицепа от первоначального значения .
Измеряют в процессе перемещения силовые реакции транспортного средства при последовательном изменении одного из перечислен ых выше параметров и фиксированных значениях все остальных.
Вычисляют запасы управляющих реакций транспортного средства по формулам
- R
«А- R
«в )
М, у
и ,и - запасы соответственно
управляющего (поворачивающего) горизонтального момента управляющей (поворачивающей)
10
мГ..
боковой силы Ryj- транспортного средства в заданных условиях движения;
максимальные значения соответственно управляющего горизонтального момента М j и управляющей
боковой силы R
УсГ
созда15
20
25
30
35
40
45
50
55
сГ С
сд
г
ТА
М
н
УС,
И1
Чв
ваемых транспортным средством в функции угла поворота управляемых колес Г при фиксированных значениях о , ,
0 и других воздействий на органы управления)
начальные значения параметров гcГ уоГ измеренные при начальных значениях Д . i ДРУГИХ воздействий на органы управления, запас тяговых реакций транспортного средства в заданных условиях движения;
максимальное значение суммарной продольной реакции R,, создаваемой транспортным средством при полном нажатии на педаль управления двигателем и фиксированных начальных значениях углов . , Д , а , сС и других воздействий на органы управления, начальное значение R, соответствующее начальным значениям угл ови,,
А . о и других воздействий на органы управления; запас тормозных реакций транспортного средства в заданных условиях движения, максимальное значение суммарной продольной реакции R,, создаваемой транспортным сред-, ством при максимальном (предельно допустимом) усилии на тормозной педали и при фиксированных начал,нмх чна- | чениях углои „ , Ро ,
111504539
Го , So других воздействий на .органы управления: начальное значение реакции R , соответствующее начальным значениям углов ,7 ,
сГо
и других
воздействий на органы
управления.
Вычисляют запасы стабилизирующих реакций транспортного средства по формулам
лч st
м
- М
R
ПК
..; s.
м. - м
- R
и,
SV
м
«л
- М
где и
.wz У/
l
;.
s.
m
м V
Sk
20
25
l V./
запасы соответственно стабилизирующего горизонтального момента М2о(.ч стабш1изирую- 1цей боковой силы Ry, которыми транспортное средство обладает в заданных условиях движения;
максимальные значения соответственно стабилизирующего горизонтального момента М,и стабилизирующей боковой силы Ry, создаваемых транспортным сред- „..
Jb
30
CTDOM В функции угла разворота «i при фиксированных начальных значениях , , f и других воздействий на органы управления
-начальные значения параметров М / и R, измеренные ПРИ начальных значениях углов
« о А Л cJf других воздействий на органы управления транспортного средства,
-запас стабилизирующего поперечного вертикального момента М, которым транспортное средство обладает в
40
и - запас.вертикального
продольного стабилизирующего момента , которым транспортное средство обладает в за данных условиях движе- ния,м .- максимальное значение вертикального продольного стабилизирующего
v
момента, создаваемого транспортным средством в функции угла продольного крена J при фиксированных начальных значения tJ.,, Ц ,Jo и других воздействий на органы управленияj М .у- начальное значение параметра Мур, измеренное при начальных значениях углов , УО S-Q ) сГо и других воздействий на органы управления транспортного средства.
Ос;тцествление предлагаемого способа позволяет для любых заданных условий движения количественно оценить потенциальные возможности транспортного средства создавать управляющие 5Q и стабилизирующие силовые Лакторы. Запасы управляющих Лакторов оцени45
..м
ваются величинами U Д с, U
и
ii.li
t
R« СДИ
характеризующими способность
транспортного средства переходить заданных условиях дни- gg по желанию водителя от одних задан- жения;ных условий движения к другим. Запамаксимальное значение сы стабилизирующих Лакторов оценистабилизирующего поперечного вертикальноваются величинами U
и и
Ry Sh
характеризующими способность транспорт12
го момента М
jijr
соз
5
0
5
..
b
0
0
даваемого транспорт- ньм средством в функции угла поперечного крена /}- при фиксированных начальных значениях oi, Д , ((о и других воздействий на органы управления-,
параметра М
f-r
измеренное при начальных значениях углов Х(,,/5, 0 других воздействий на органы управления транспортного средства:
у
и - запас.вертикального
продольного стабилизирующего момента , которым транспортное средство обладает в заданных условиях движе- ния,м .- максимальное значение вертикального продольного стабилизирующего
v
момента, создаваемого транспортным средством в функции угла продольного крена J при фиксированных начальных значения tJ.,, Ц ,Jo и других воздействий на органы управленияj М .у- начальное значение параметра Мур, измеренное при начальных значениях углов , УО S-Q ) сГо и других воздействий на органы управления транспортного средства.
Ос;тцествление предлагаемого способа позволяет для любых заданных условий движения количественно оценить потенциальные возможности транспортного средства создавать управляющие Q и стабилизирующие силовые Лакторы. Запасы управляющих Лакторов оцени5
..м
ваются величинами U Д с, U
и
ii.li
t
R« СДИ
характеризующими способность
сы стабилизирующих Лакторов оцениваются величинами U
и и
Ry Sh
характеризующими способность транспорт13
ного рредства удержш ать заданные условия днижения без бокового скольжения (заноса), и величинами UjJ и и. , характеризующими способност транспортного средства удерживать заданные условия движения без опрокидывания.
Раздельный привод любой тормозной системы включает в себя источник энергии, служащий цля создания рабочего усилия в тормозных механизмах (его функции может выполнять водитель), и механизм1 1 управления тормозами (по одному для каждого конту- ра). В предлагаемом устройстве (фиг.4) тормозной привод состоит из источника энергии 16, механизма 17 управления левым тормозом и механизма 18 управления правым тормозом. В качестве указанных элементов 16-18 могут быть использованы, например, стандартные элементы гидропривода (гидроаккумулятор и золотниковые распределители) или пневмопривода (ресивер, тормозные краны).
Установленный в сцепке тягача 2 с динамометрическим прицепом 1 датчик 13 позволяет измерить угол между продольными осями тягача и при цепа. Датчик 13 связан с механизмами 17 и 8 управления тормозами. При отклонении угла о на величину, превышающую допустимы диапазон i А ci. ,
датчик 13 обеспечивает включение Г
соответствующего механизма 17 или 18 (при уменьшении датчик 13 включае механизм 17, при увеличсни о - механизм 18).
Связь датчика 13 с механизмами 17 И 18 может быть, например, электрической. В этом случае при отклонении угла oL свыше допустимой велинины & tJ. в ту или другую стороны замыкаются соответствующие электрические контакты, дающие электрический сигнал на включение механизма 17 или 18 Если отклонение угла «/ не превышает допустимую величину, то управляющие сигналы от датчика 13 отсутствуют и механизмы управления тормозами выключены (система стабилизации не работает) .
Связь датчика 13 с механизмами 17 и 18 может быть механической, гид- равлической, пневматической.
Лредлагаемьш способ и устройство позволяют количественно оценить влияние тюбьгх конструктивных параметров
53914
на величины указанных запягов и выявить наиболее эффективные ПУТИ ог;ти- мизации конструкции транспортных средств в отношении их активной безопасности.
Формула изобретения
151
транспортного средства с дополнительной рамой, отличающийся тем, что, целью повышения точности и сокращения длительности испытаний путем стабилизации движения на режиме замера, динамометрический прицеп снабжен тормозными механизмами левого и правого бортов, раздельным по
Tflet
/Ift unf
Auffff UHf
Центр поворота
П одольная ось динамо- метрического прицепа ,
ТИР
п
Центр поворота .
Продо/иная оа дина- нометрического причепл
50453916
бортам тормозным приводом, содержащим источник энергии и механизмы раздельного управления тормозами левого
- и правого бортов, датчик угла поворота основной рамы относительно тягача, установленньй в сцепке и связанньй с механизмами раздельного управления тормозами левого и правого бортов.
Пр
п
Фиг. 2
Продо/nHui ось тягача
O./tef nff
Редактор М.Циткина
Составитель С.Белоусько
Техред А.Кравчук Корректор Т.Малец
Заказ 5244/43
Тираж 789
ВНИИПИ Государственного комятег& по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
М
) 5
в
Подписное
| Авторское свидетельство СССР № , кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
