Предлагаемое изобретение относится к измерительной технике, в частности к испытательным стендам для проведения контроля характеристик инерциальных измерителей, в состав которых входят микромеханические вибрационные гироскопы-акселерометры.
Известен стенд для контроля прецизионных датчиков угловых скоростей, содержащий основание, имеющее возможность вращаться вокруг оси стенда и предназначенное для закрепления на нем контролируемого датчика угловой скорости, имеющего датчик угла, датчик момента, соединенные через усилитель обратной связи, электродвигатель привода стенда, редукцию, коллектор для подвода питания к контролируемому датчику угловой скорости, задатчик эталонного напряжения (см. авторское свидетельство СССР №476516, МКИ G01Р 13/00, 1973 г.).
Данный стенд, имеющий в основе конструкции электромеханический поворотный стол с редукцией, не обеспечивает возможности контроля ряда параметров датчиков, например, амплитудно-частотную и фазово-частотную характеристики в условиях, имеющих место при эксплуатации (так как механические колебания основания вокруг оси чувствительности, например, подменяются колебаниями его оси прецессии, возбуждаемыми генератором).
Известен широкодиапазонный стенд для контроля параметров измерителей угловых скоростей, содержащий платформу для крепления контролируемого измерителя и подвода к нему питания через кольцевой коллектор, персональную ЭВМ, в слоты которой встроена схема сопряжения с элементами управления испытательными характеристиками платформы и датчиками контролируемых параметров испытуемых измерителей, шесть кварцевых маятниковых акселерометров, гироскопический датчик угловой скорости, два геркона, магнит, механизм отслеживания, суммирующий двухканальный усилитель (см. патент РФ №2142643 МКИ G01Р 21/00, 1996 г.).
Недостатком стенда является отсутствие возможности контроля характеристик микромеханических акселерометров и гироскопов при воздействии вибрационных воздействий и линейных перегрузок в условиях повышенной температуры и влажности.
Такая задача возникает в связи с использованием в системах навигации и управления движением различных объектов микромеханических бесплатформенных инерциальных измерительных блоков (БИИБ), в состав которых входят корпусные и бескорпусные блоки сервисной микроэлектроники и микромеханические вибрационные гироскопы-акселерометры.
Известен способ испытаний бесплатформенных инерциальных измерительных блоков на основе микромеханических гироскопов и акселерометров, включающий определение характеристик БИИБ в условиях одновременного воздействия на него динамических и температурных испытательных параметров, реализованный в известном широкодиапазонном стенде, содержащем поворотную платформу для крепления испытуемого измерителя и подвода к нему питания через кольцевой коллектор, персональную ЭВМ, в слоты которой встроена схема сопряжения с элементами управления испытательными характеристиками платформы и датчиками контролируемых параметров испытуемых измерителей, установленные на платформе охладитель воздуха, термоэлектрический модуль с микровибростолом и универсальную термокамеру (см. патент РФ №2162230, кл. G01С 21/00, 2000).
Недостатком указанного технического решения являются недостаточные функциональные возможности для обеспечения комплексных испытаний по калибровке точностных характеристик микромеханических гироскопических чувствительных элементов бесплатформенных инерциальных измерительных систем, а также ускоренных ресурсных испытаний этих систем в широком температурном, скоростном диапазоне, с наложением вибрационных воздействий и линейных перегрузок в различных направлениях, в том числе ударных, что обусловлено ограниченными возможностями подачи испытательных параметров, как по времени, так и по направлению воздействия, а также несовершенством конструктивных элементов стенда и его компоновки.
Наиболее близким техническим решением является известный способ испытаний бесплатформенных инерциальных измерительных блоков (БИИБ) на основе микромеханических гироскопов и акселерометров, включающий определение характеристик БИИБ в условиях одновременного воздействия на него динамических и температурных испытательных параметров, предварительно задают направление оси комплексного динамического воздействия на БИИБ и устанавливают БИИБ так, чтобы геометрический центр его измерительной системы координат совпадал с осью комплексного динамического воздействия на БИИБ, а испытания производят при каждом заданном направлении пространственной ориентации измерительной системы координат БИИБ относительно оси комплексного динамического воздействия, полученным поворотом БИИБ вокруг указанного геометрического центра его измерительной системы координат, при этом испытательное воздействие на БИИБ производят одновременной или последовательной подачей на него одного или более чем одного испытательных параметров.
Реализующее этот способ известное устройство для испытаний бесплатформенных инерциальных измерительных блоков (БИИБ) на основе микромеханических гироскопов и акселерометров содержит термокамеру, одноосный стенд с поворотной платформой для позиционирования, вращательного движения и подвода питания к БИИБ через кольцевой коллектор, вибростенд, двухкоординатный кардановый подвес, персональную ЭВМ, в слоты которой встроена схема сопряжения с элементами управления испытательными параметрами и датчиками контролируемых характеристик БИИБ, испытательную платформу для закрепления БИИБ, а в полость термокамеры, через отверстие в ее нижней части, встроена вертикально направленная ось вращения одноосного стенда с поворотной платформой, на которой посредством жесткой станины с системой низкочастотной изоляции и автоматической компенсации нагрузки жестко закреплен вибростенд, ось задания виброускорений которого соосна оси вращения одноосного стенда, при этом на рабочей поверхности вибростенда жестко закреплен двухосевой кардановый подвес, на котором установлена испытательная платформа для закрепления БИИБ, внутренняя ось вращения которой соосна с осью вращения одноосного стенда и осью задания виброускорений вибростенда (патент РФ №2256880, кл. G01С 21/00, опубл. 2005).
Недостатками указанного технического решения являются относительная сложность проведения комплексных испытаний и задания режимов проверки, длительность проведения испытаний, невысокая надежность в случае проведения испытаний серий блоков, сложность стендового оборудования и монтажа испытуемых блоков по времени, а также несовершенство конструктивных элементов стенда и его компоновки.
Техническим результатом предлагаемого изобретения является ускорение проведения динамических и температурных (одновременно и отдельно) испытаний микроминиатюрных приборов в широком диапазоне с одновременным повышением надежности оборудования и обеспечением достоверности воспроизведения условий эксплуатации в процессе проведения испытаний, а также упрощением обработки измерительной информации о состоянии испытуемого прибора.
Далее бесплатформенный инерциальный измерительный блок (БИИБ) заменен аналогом - унифицированной системой позиционирования на основе микромеханических акселерометров и гироскопов (УФСП).
Указанный технический результат достигается тем, что в известном способе комплексных испытаний унифицированных систем позиционирования на основе микромеханических акселерометров и гироскопов (УФСП), включающем определение характеристик УФСП в условиях одновременного воздействия на него динамических в виде линейной перегрузки или синусоидальной вибрации, или одиночных ударных импульсов, а также температурных испытательных параметров, для его обеспечения воздействие всех динамических параметров задают с помощью одного поворотного стенда, при этом воздействие линейной перегрузки обеспечивают созданием нормального ускорения, величина которого определяется соотношением
аn=ω2·R,
где аn - нормальное ускорение, пропорциональное угловой скорости вращения поворотной платформы стенда,
ω - угловая скорость вращения поворотной платформы,
R - расстояние от оси вращения поворотной платформы до места установки испытуемого прибора,
воздействие синусоидальной вибрации обеспечивают созданием тангенциального ускорения, величина которого определяется соотношением
аτ=ε·R,
где аτ - тангенциальное ускорение, пропорциональное угловому ускорению поворотной платформы,
ε-ε(t)=E·sin(2πν·t) - задаваемое угловое ускорение поворотной платформы,
R - расстояние от оси вращения поворотной платформы до места установки испытуемого прибора,
Е - амплитуда углового ускорения,
ν - частота углового ускорения,
t - время,
воздействие кратковременного одиночного ударного импульса обеспечивают созданием углового ускорения скоростного стола в виде половины периода синусоиды.
Указанный технический результат для автоматизированного стенда достигается тем, что в известное устройство для комплексных испытаний унифицированных систем позиционирования на основе микромеханических акселерометров и гироскопов (УФСП), содержащее термокамеру, в полость которой через отверстие в ее нижней части встроена вертикально направленная ось вращения одноосного стенда вращательного движения с поворотной платформой для позиционирования испытуемого прибора, подвод питания к УФСП через кольцевой коллектор, персональную ЭВМ, в слоты которой встроена схема сопряжения с элементами управления испытательными параметрами и датчиками контролируемых характеристик УФСП, введен второй одноосный стенд вращательного движения с поворотной испытательной платформой для позиционирования, ось поворота которого ортогональна оси первого одноосного стенда вращательного движения и встроена в полость термокамеры через отверстие в ее средней части.
Введение второго одноосного стенда вращательного движения обеспечивает возможность проведения всего комплекса испытаний УФСП в условиях воздействия силы тяготения Земли.
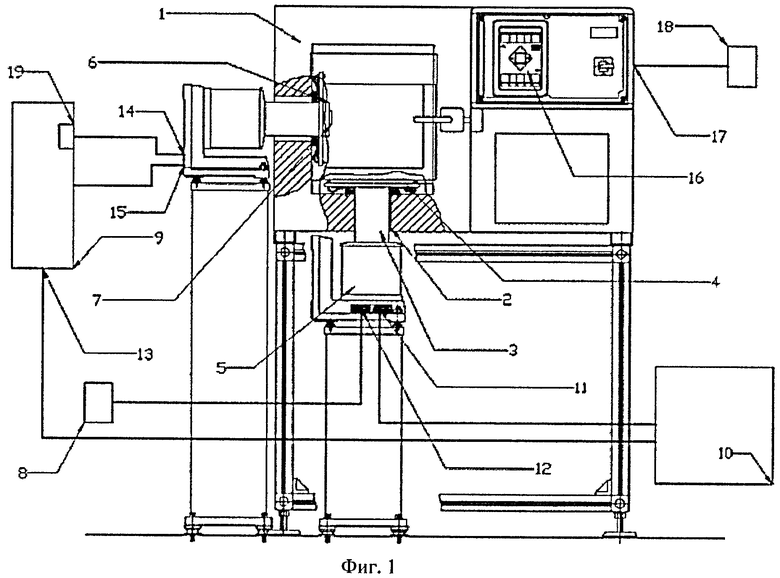
На фиг.1 представлен общий вид автоматизированного стенда.
На фиг.2 показана половина периода синусоиды при задании одиночного ударного импульса.
Состав стенда:
1 - термокамера
2 - отверстие с термоизоляционной прокладкой
3 - ось с поворотной платформой
4 - поворотная платформа
5 - одноосный стенд для позиционирования и задания вращательного движения
6 - унифицированная платформа для установки УФСП
7 - испытуемый УФСП
8 - ИП (источник питания - здесь и далее) испытуемого измерителя
9 - СУ (система управления - здесь и далее) одноосным вращательным стендом
10 - ПК (персональный компьютер)
11 - кабель гальванической связи испытуемого измерителя с ПК
12 - кабель гальванической связи ИП с испытуемым измерителем
13 - кабель гальванической связи ПК с СУ одноосным вращательным стендом
14 - кабель гальванической связи одноосного вращательного стенда с ИП
15 - кабель гальванической связи одноосного вращательного стенда с СУ
16 - СУ термокамерой
17 - кабель гальванической связи термокамеры с ИП
18 - ИП термокамеры
19 - ИП одноосного вращательного стенда
С помощью источника питания 19, подключенного к скоростному стенду 5 кабелем 14, и системы задания и контроля углового вращения, включающей в себя персональный компьютер 10 с программно-математическим обеспечением, контроллер управления стендом 9 и соединительный кабель 13, производится включение скоростного стенда 5, задание скорости вращения поворотной платформы 4 и осуществляется контроль фактического значения скорости вращения с фиксацией на экране монитора и накоплением этих параметров с временными метками на магнитном носителе ПК 10;
- с помощью источника питания 8, подключенного кабелем 12 к электрическому разъему на корпусе скоростного стенда 5, производится подача питания на инерциальный измеритель 7, а с помощью ПК 10, подключенного кабелем 11 к разъему на корпусе скоростного стенда 5, и программно-математического обеспечения производится съем измеряемых параметров инерциального измерителя УФСП 7 (фиг.1).
Способ испытаний заключается в следующем.
Для проверки работоспособности прибора при воздействии на него линейной перегрузки задается постоянная угловая скорость вращения скоростного стола. Прибор, установленный на столе, испытывает воздействие нормального ускорения, величина которого определяется соотношением
аn=ω2·R,
где аn - нормальное ускорение, пропорциональное угловой скорости вращения поворотной платформы;
ω - угловая скорость вращения поворотной платформы;
R - расстояние от оси вращения до испытуемого прибора.
Таким образом, рассматриваемый стенд может использоваться для проверки работоспособности прибора при воздействии линейных перегрузок.
Для проверки работоспособности прибора при воздействии на него синусоидальной вибрации задается угловое ускорение скоростного стола. Прибор, установленный на столе, испытывает воздействие тангенциального ускорения, величина которого определяется соотношением
аτ=ε·R,
где аτ - тангенциальное ускорение, пропорциональное угловому ускорению поворотной платформы;
ε - угловое ускорение поворотной платформы;
R - расстояние от оси вращения до испытуемого прибора.
Задаваемое угловое ускорение определяется соотношением
ε(t)=E·sin(2πv·t),
где ε(t) - угловое ускорение;
Е - амплитуда углового ускорения;
ν - частота углового ускорения;
t - время.
Линейное ускорение, как функция времени, определяется следующим соотношением
a(t)=A·sin(2πν·t),
где a(t) - вибрационное ускорение;
А - амплитуда виброускорения;
ν - частота виброускорения;
A=E·R
Таким образом, рассматриваемый стенд может использоваться для проверки работоспособности прибора при воздействии синусоидальной вибрации.
Для проверки работоспособности прибора при воздействии на него кратковременного одиночного ударного импульса задается угловое ускорение скоростного стола в виде половины периода синусоиды (см. фиг.2).
Прибор, установленный на скоростном столе, испытывает кратковременное воздействие тангенциального ускорения в виде ударного импульса.
Таким образом, рассматриваемый стенд может использоваться для проверки работоспособности прибора при воздействии одиночных ударных импульсов.
Таким образом, представлено математическое обоснование принципиальной возможности использования вращательного стенда для проведения испытаний систем позиционирования на основе микромеханических акселерометров и гироскопов при воздействии на них синусоидальной вибрации в широком диапазоне частот, а также кратковременных одиночных ударных импульсов.
В связи с тем, что проведение испытаний приборов на ресурс, который может достигать сотни тысяч часов, весьма затруднительно из-за технических и экономических факторов, требуется разработка методики ускоренных испытаний.
Ускоренные испытания микромеханических акселерометров (далее ММА) и микромеханических гироскопов (далее ММГ) и серийных приборов (далее СП) на их основе позволяют при помощи увеличения одной или нескольких нагрузок на прибор определить реальную интенсивность отказов за относительно короткое время и с использованием малого количества образцов.
При разработке методики ускоренных испытаний необходимо:
- выбрать воздействующие факторы, которые могут быть использованы в качестве форсирующих;
- выбрать уровень форсирующего воздействия, ускоряющего процесс старения, при котором физическая картина старения не меняется;
- найти функциональную зависимость между показателями надежности в нормальном и форсированном режимах;
- установить параметры и критерии годности опытных образцов ММА и ММГ;
- разработать программу ускоренных испытаний ММА и ММГ, определяющую объем испытаний и сочетание уровней воздействующих факторов.
Для ММА и ММГ, которые, как правило, находятся в герметичном корпусе, применение в качестве форсирующих факторов увеличения влажности и давления нецелесообразно, так как они не соответствуют реальным условиям эксплуатации.
В качестве ускоряющих факторов рекомендуется использовать температуру и напряжение.
Увеличение напряжения питания и плотности тока может привести к изменению физики отказов по причине возникновения нелинейных эффектов, связанных с возрастанием напряженности поля, критичным для малых толщин изоляции и зазоров между электродами.
Так как скорость протекания процессов деградации значительно зависит от температуры, наиболее приемлемым ускоряющим фактором является повышенная температура испытаний.
Испытание на работоспособность блока УФСП проводят в течение 1250 часов.
Выключенный прибор устанавливают в термокамеру при нормальной температуре. В течение произвольного времени повышают температуру в термокамере до +85°С. Выдерживают выключенный прибор при этой температуре не менее трех часов. Включают прибор и выдерживают его при этой температуре 1250 часов, после чего выключают прибор.
После выдержки выключенного прибора в нормальных условиях не менее трех часов проводят проверку его параметров.
Если после проведения форсированных испытаний параметры-критерии годности остаются в допустимых по конструкторской документации в пределах, то ММА и ММГ считаются выдержавшими испытания.
Количество образцов, подвергаемых испытаниям, выбирается в соответствие с ГОСТ 20.57.304-76.
После проведения ускоренных испытаний определяют время появления отказа испытуемых приборов и вычисляют время наработки на отказ по формуле
где tноi - время появления отказа i-го прибора;
σtно - среднеквадратичное отклонение при определении времени наработки на отказ;
N - количество образцов.
Малые габаритно-массовые характеристики и низкое энергопотребление бесплатформенных инерциальных блоков на основе микромеханических кремниевых чувствительных элементов делает возможным создание универсального испытательного многофункционального стенда, обеспечивающего совмещение различных видов испытаний отмеченных приборов, в том числе при одновременном задании нескольких факторов, влияющих на характеристики испытываемого прибора, то есть создать условия, эквивалентные условиям работы приборов на объектах, одновременно, для сокращения времени испытаний.
Использование предлагаемых способа и стенда позволяет выполнять следующие типы испытаний.
1. Калибровка точностных параметров микромеханических гироскопов и акселерометров в составе УФСП, в том числе масштабного коэффициента и нулевого сигнала, в температурном диапазоне эксплуатации.
2. Функционирование УФСП, т.е. измерение точностных параметров в диапазоне эксплуатационных температур и влажности.
3. Ускоренные ресурсные испытания.
4. Температурно-влажностные испытания.
5. Вибрационные испытания.
Контрольно-измерительная аппаратура (КИА) на основе рассмотренного стенда обеспечивает проведение комплексных испытаний как по калибровке точностных характеристик микромеханических чувствительных элементов УФСП, так и ускоренных ресурсных испытаний УФСП в широком температурном, скоростном диапазоне с наложением вибрационных воздействий и линейных перегрузок, что приводит к значительному (на порядок) снижению времени и стоимости проведения испытаний.
Представленная КИА обеспечивает, в сочетании с техническими возможностями комплексного стенда:
- высокую достоверность контроля параметров прибора в соответствии с требованиями технической документации;
- исключение «ручного обсчета» контролируемых параметров и возможности субъективных погрешностей при оценке параметров;
- сокращение в 2-3 раза времени калибровки УФСП предложенной конфигурации в сравнении со временем калибровки УФСП «обычной» конфигурации;
- проведение эксперимента, обработку данных, получение точностных паспортных характеристик прибора, а также паспортизацию этих параметров.
Представленный комплексный измерительный стенд, обеспечивающий распределение технических возможностей за счет воспроизведения динамических и температурных воздействий, позволяет определить и паспортизировать в автоматическом режиме все составляющие модели погрешностей УФСП и тем самым осуществить в полном объеме его калибровку и испытания.
Малые габаритно-массовые характеристики и низкое энергопотребление УФСП на основе микромеханических кремниевых чувствительных элементов делает возможным проводить групповые испытания, и применение универсального испытательного многофункционального стенда, обеспечивающего совмещение различных видов испытаний отмеченных приборов, в том числе при одновременном задании нескольких факторов, влияющих на характеристики испытываемого прибора, то есть создать условия, эквивалентные условиям работы приборов на объектах, а также сократить время испытаний.
Разработана процедура сертификации микромеханических датчиков и УФСП на их основе и схема построения, методика и алгоритм обработки информации при ресурсных испытаниях, позволяющая сократить время ресурсных испытаний и время сертификации в десятки раз. Также представлено обоснование принципиальной возможности использования вращательного стенда для проведения испытаний систем позиционирования на основе микромеханических акселерометров и гироскопов при воздействии на них синусоидальной вибрации в широком диапазоне частот, а также кратковременных одиночных ударных импульсов.
Таким образом обеспечено достижение технического результата предлагаемого изобретения, которым является ускорение проведения динамических и температурных (одновременно и отдельно) испытаний микроминиатюрных приборов в широком диапазоне с одновременным повышением надежности оборудования и обеспечением достоверности воспроизведения условий эксплуатации в процессе проведения испытаний, а также упрощением обработки измерительной информации о состоянии испытуемого прибора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256880C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ | 2000 |
|
RU2162230C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| БОРТОВОЕ УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ | 2011 |
|
RU2480834C1 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ УКЛОНОВ ДЛЯ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТОВ | 2008 |
|
RU2382986C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ НАНОЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ И НАНОЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ С АВТОЭЛЕКТРОННОЙ ЭМИССИЕЙ | 2011 |
|
RU2484483C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ, ТЕРМОЭЛЕКТРОННОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ С АВТОЭЛЕКТРОННОЙ ЭМИССИЕЙ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2010 |
|
RU2447411C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕСА ГРУЗА И КОНТРОЛЯ ЗАГРУЗКИ ТРАНСПОРТНОГО СРЕДСТВА И БОРТОВАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445586C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2011 |
|
RU2486467C1 |
Изобретения относятся к измерительной технике, в частности к испытательным стендам для проведения контроля характеристик инерциальных измерителей, в состав которых входят микромеханические вибрационные гироскопы-акселерометры. Технический результат - расширение функциональных возможностей. Для достижения данного результата воздействие основных динамических параметров задают с помощью одного поворотного стенда. При этом воздействие линейной перегрузки обеспечивают созданием нормального ускорения в зависимости от расстояния от оси вращения поворотной платформы до места установки испытуемого прибора. Воздействие синусоидальной вибрации обеспечивают созданием тангенциального ускорения, а воздействие кратковременного одиночного ударного импульса обеспечивают созданием углового ускорения скоростного стола в виде половины периода синусоиды. 2 н.п. ф-лы, 2 ил.
1. Способ комплексных испытаний унифицированных систем позиционирования на основе микромеханических акселерометров и гироскопов (УФСП), включающий определение характеристик УФСП в условиях одновременного воздействия на него динамических в виде линейной перегрузки или синусоидальной вибрации или одиночных ударных импульсов, а также температурных испытательных параметров, отличающийся тем, что воздействие всех динамических параметров задают с помощью одного поворотного стенда, при этом воздействие линейной перегрузки обеспечивают созданием нормального ускорения, величина которого определяется соотношением:
ап=ω2·R,
где aп - нормальное ускорение, пропорциональное угловой скорости вращения поворотной платформы стенда,
ω - угловая скорость вращения поворотной платформы,
R - расстояние от оси вращения поворотной платформы до места установки испытуемого прибора,
воздействие синусоидальной вибрации обеспечивают созданием тангенциального ускорения, величина которого определяется соотношением:
аr=ε·R,
где аr - тангенциальное ускорение, пропорциональное угловому ускорению поворотной платформы,
ε-ε(t)=E·sin(2pv·t) - задаваемое угловое ускорение поворотной платформы,
R - расстояние от оси вращения поворотной платформы до места установки испытуемого прибора,
Е - амплитуда углового ускорения,
v - частота углового ускорения, t-время,
воздействие кратковременного одиночного ударного импульса обеспечивают созданием углового ускорения поворотной платформы стенда в виде половины периода синусоиды.
2. Автоматизированный стенд для комплексных испытаний унифицированных систем позиционирования на основе микромеханических акселерометров и гироскопов (УФСП), содержащий термокамеру, в полость которой через отверстие в ее нижней части встроена вертикально направленная ось вращения одноосного стенда вращательного движения с поворотной испытательной платформой для позиционирования испытуемого прибора, подвод питания к УФСП выполнен через кольцевой коллектор, персональную ЭВМ, в слоты которой встроена схема сопряжения с элементами управления испытательными параметрами и датчиками контролируемых характеристик УФСП, отличающийся тем, что в него введен второй одноосный стенд вращательного движения с поворотной испытательной платформой для позиционирования, ось поворота которого ортогональна оси первого одноосного стенда вращательного движения и встроена в полость термокамеры через отверстие в ее средней части.
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256880C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТОЙ КЛАССА "ВОЗДУХ-ВОЗДУХ" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099665C1 |
| ШЕПЕЛЕВ Н.И | |||
| Сборка, регулировка и испытание гироскопических приборов | |||
| - М.: Машиностроение, 1977, 192 с., с.153-170 | |||
| ЯГОДКИН В.В., ХЛЕБНИКОВ Г.А | |||
| Гироскопические приборы баллистических ракет | |||
| - М.: Военное издание, 1967, 216 с., с.54-77 | |||
| МАТВЕЕВ С.С | |||
| Гирокомпасы и | |||

