Изобретение относится к двум областям: к судам, преимущественно водоизмещающим, в частности к авианосцам, и к шасси летательных аппаратов для посадки на воду.
Известны суда катамаранного и тримаранного типов, и известны шасси для летательных аппаратов, состоящие из двух удлиненных или трех и более поплавков другой формы. См., например, "Самолеты второй мировой". ACT, 2000, стр.176.
Недостатком этих устройств является то, что при волнении они подвержены качке. Качка отрицательно воздействует на экипаж, груз и долговечность конструкции. В частности качка мешает посадке самолетов и вертолетов на авианосец, и мешает посадке вертолетов на воду /они могут коснуться винтами воды/.
Суть изобретения в том, что адаптивная плавучая платформа состоит из собственно платформы /корпус судна, фюзеляж самолета или вертолета/, и крепящихся к ней двух или более поплавков, а крепления поплавков позволяют им перемещаться относительно платформы в вертикальном или близком к вертикальному дугообразном направлении. Причем каждое крепление имеет гидроцилиндр, соединенный трубопроводом и реверсивным насосом с двумя соседними гидроцилиндрами и/или с одним или двумя противоположными гидроцилиндрами /гидроцилиндрами противоположных поплавков/ или со всеми остальными гидроцилиндрами /закольцованная линия/. Все насосы управляются от гироскопического датчика, расположенного на платформе.
При этом сама платформа может быть поднята над водой или частично погружена в нее /например, тримаран/. В последнем случае эффект гиростабилизации будет частичным, или же потребуется значительно увеличить мощность насосов. В полупогруженном варианте рекомендуется совместное применение гидродинамических успокоителей качки.
Основной смысл изобретения в том, что при неизменном положении центра тяжести платформы ее поддержание в горизонтальном положении с минимальными отклонениями по вертикали практически не требует расхода энергии. Для этого площади сечения гидроцилиндров должны быть пропорциональны нагрузке от платформы на соответствующие поплавки или части удлиненных поплавков. В этом случае давления в соединенных гидроцилиндрах будут равны. А при изменении положения поплавков поднимающийся поплавок сам сообщит свою энергию опускающемуся поплавку. Задача насоса при этом всего лишь компенсировать силу трения гидрожидкости в трубопроводах /из чего следует, что она должна иметь небольшую вязкость/. То есть задача гидропривода поплавков - не бороться с волнами, а подстраиваться, адаптироваться под них. (см. фиг.1).
Даже при небольшом отклонении центра тяжести от расчетного в соединенных гидроцилиндрах возникнет разность давлений, и насосу потребуется значительно большая мощность. Поэтому следует принять меры к постоянству центра тяжести - равномерный расход топлива из баков, установка вооружения вблизи центра тяжести и т.п.
Следует бороться также с перекашивающими усилиями, например с боковым действием ветра и/или волн. В этом случае центр тяжести может быть сознательно смещен вбок - критерием является одинаковое давление в соединенных гидроцилиндрах.
Гидроцилиндры имеет смысл соединять с двумя соседними гидроцилиндрами, и/или с одним или двумя противоположными. Например при четырех точках крепления гидроцилиндры можно соединить диагонально. Если гидроцилиндров много, имеет смысл применить закольцованную линию.
Если расстояние между соединенными гидроцилиндрами /т.е. между поплавками/ велико, то имеет смысл крепление поплавка и его гидроцилиндр соединить жесткими тягами или гибкими тросами так, чтобы все гидроцилиндры оказались компактно сгруппированы. Это уменьшит инерционность системы, уменьшит гидродинамические потери в трубопроводах, а значит и мощность привода. Для гибких тросов можно применить современные легкие, высокопрочные и высокомодульные волокна типа «Вектран-2000», «Спектра».
В некоторых случаях, например для противодействия крену авианосца может возникнуть необходимость создания или хотя бы сохранения большой разности давлений между соединенными гидроцилиндрами. Создание большого давления потребует очень резкого роста мощности насосов, поэтому от этого целесообразно отказаться. А вот сохранить такое давление, если оно возникло само от действия волн, достаточно легко. Для этого насос должен быть объемного типа, а передача мощности от привода к нему должна быть самотормозящей. Оптимальным является роторный лопастной насос и червячная передача к нему от асинхронного электродвигателя с наружным ротором. Есть и другой вариант - установить на трубопроводы быстродействующие краны.
Идеальное крепление поплавков к платформе должно обеспечивать строго вертикальное перемещение поплавков без их поворота или крена в воде /т.к. это лишний расход энергии/. Таким креплением может быть скользящий профилированный /например, чечевицеобразный/ шток, скользяще установленный в вертикальных направляющих. Профилировать шток желательно для того, чтобы он не вращался.
Но практичнее будет рычажная конструкция. Возможна простейшая однорычажная конструкция, в которой поплавки расположены на вынесенных вбок-вниз рычагах. Но при ее использовании возможны неприятные боковые перемещения платформы, так как поплавки поднимаются-опускаются не вертикально.
Возможна четырехзвенная, например трапециевидная конструкция, см. фиг.1-3. Такая конструкция обеспечивает достаточно точное вертикальное перемещение поплавков на волне. В этой конструкции четырехзвенный механизм состоит из стойки 4, двух поперечных рычагов 2, 3, и из боковой части платформы 1. Причем поперечные рычаги крепятся к платформе плоскими шарнирами с горизонтальными осями, а к стойке - плоскими или шаровыми шарнирами.
В такой конструкции поплавок может крепиться к стойке жестко, но лучше плоским шарниром с осью к поперечной длинной стороне поплавка, или шаровым шарниром, расположенным не выше центра плавучести поплавка.
Но в такой конструкции, где поплавок прикреплен плоским шарниром, он при поднятии-опускании еще и поворачивается, кренится. Чтобы при этом минимизировать потери от «проворота» поплавка в воде он должен иметь в сечении форму круга или части круга /по крайней мере круглой должна быть часть, погруженная в воду/.
Поплавок, прикрепленный шаровым шарниром, может иметь в сечении любую удобную для бокового обтекания волнами форму, например чечевицеобразную.
На судах небольшого водоизмещения и на летательных аппаратах целесообразно иметь два сильно вытянутых поплавка, прикрепленных к платформе двумя или более креплениями каждый. Так как при продольном перекашивании такого поплавка расстояние между проекциями точек крепления меняется, то рычаги одного /лучше, заднего/ крепления крепятся к платформе двумя плоскими шарнирами /чтобы воспринимать продольную нагрузку/, а рычаги остальных креплений крепятся к платформе одним плоским шарниром /лучше - верхним/ и одним шаровым.
Для правильного построения четырехзвенного механизма длина и расположение одного из рычагов /лучше - верхнего/ находятся путем задания поплавку отклонения по вертикали от среднего положения, исходя из неизменности длин другого рычага и стойки. При этом получается несколько местоположений верхнего конца стойки, через которые проводится приблизительная окружность, центр которой и является вторым концом искомого рычага.
На фиг.1 изображена адаптивная плавучая платформа на волне. А на фиг.2, 3 показаны возможные варианты крепления поплавка. Здесь: 1 - платформа, 2, 3 - верхний и нижний поперечные рычаги, 4 - стойка, причем на фиг.3 она имеет изогнутую форму, 5 - поплавок, 6 - гидроцилиндр, 7 - гибкий трос. На фиг.2 поплавок крепится к стойке плоским шарниром с поперечной осью 8. А на фиг.3 чечевицеобразный поплавок крепится шаровым шарниром 9.
На фиг.4 показано приблизительное нахождение длины верхнего рычага АВ и местоположения точки В, то есть шарнира.
Работает устройство так: при набегании волны с одной стороны /справа, слева, спереди, сзади, по диагонали/ один из поплавков или часть длинного поплавка поднимается и выдавливает жидкость из своего гидроцилиндра 6, которая по трубопроводу поступает в другой или другие гидроцилиндры, опуская поплавок, попавший во впадину между волнами. Этому перетеканию жидкости по сигналу гироскопического датчика дозировано помогает реверсивный насос /насосы/.
Для построения геометрии четырехзвенного механизма зададимся несколькими /минимум - тремя/ местоположениями поплавка на одной вертикали. Здесь точка Е - это центр круглого поплавка, или же шаровой шарнир чечевицеобразного поплавка.
Каждому положению точки Е соответствует определенное положение нижнего рычага 3 с точками СД, и следовательно - определенное положение стойки 4 и ее конца - точки А. Определив несколько точек А, А1, А2, проводим через них окружность. Центр этой окружности и будет точкой В.
Применение изобретения повысит комфорт и боеспособность судов и кораблей, и сделает возможной посадку самолетов и вертолетов на большую волну.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОСТОВАЯ ПЛАВУЧАЯ ПЛАТФОРМА | 2023 |
|
RU2807666C1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ВЕРТОЛЕТОВ (ВАРИАНТЫ) | 2010 |
|
RU2446991C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА (ВАРИАНТЫ) | 2010 |
|
RU2418713C1 |
| МНОГОКОРПУСНОЕ СУДНО /ВАРИАНТЫ/ | 2015 |
|
RU2579633C1 |
| МЕХАНИЗМ КОМПЕНСАЦИИ УСИЛИЙ УПРАВЛЕНИЯ | 2012 |
|
RU2515820C2 |
| ВАРИАТИВНОЕ РУЧНОЕ УПРАВЛЕНИЕ САМОЛЕТОМ (ВАРИАНТЫ) | 2012 |
|
RU2505456C1 |
| ГИДРОСАМОЛЕТ /ВАРИАНТЫ/ | 2013 |
|
RU2513345C1 |
| ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2006 |
|
RU2351782C2 |
| ОБТЕКАТЕЛЬ ШАССИ | 2012 |
|
RU2494010C1 |
| ШАССИ (ВАРИАНТЫ) | 2006 |
|
RU2356794C2 |



Изобретение относится к судостроению и к гидроавиации. Адаптивная плавучая платформа состоит из платформы, поплавков и их креплений к платформе, которые выполнены подвижными в вертикальном или близком к вертикальному дугообразном направлении. Каждое крепление имеет гидроцилиндр, соединенный трубопроводом и реверсивным гидронасосом с двумя соседними гидроцилиндрами и/или с одним или двумя противоположными гидроцилиндрами, или со всеми остальными гидроцилиндрами. Реверсивные насосы управляются от гироскопического датчика, расположенного на платформе. Поплавки соединены с гидроцилиндрами посредством жестких или гибких тяг. На трубопроводах установлены краны. Подвижные крепления поплавков представляют собой трапециевидный или четырехзвенный рычажный механизм. Поплавок имеет в сечении форму круга, части круга или удлиненную форму. Поплавок крепится к платформе двумя или более креплениями, причем рычаги одного крепления крепятся к платформе двумя плоскими шарнирами, а рычаги остальных креплений крепятся к платформе одним плоским шарниром и одним шаровым шарниром. Достигается поддержание платформы в горизонтальном положении с минимальными отклонениями по вертикали на большой волне, что повышает боеспособность судов и обеспечивает посадку летательных аппаратов на платформу. 10 з.п. ф-лы, 4 ил.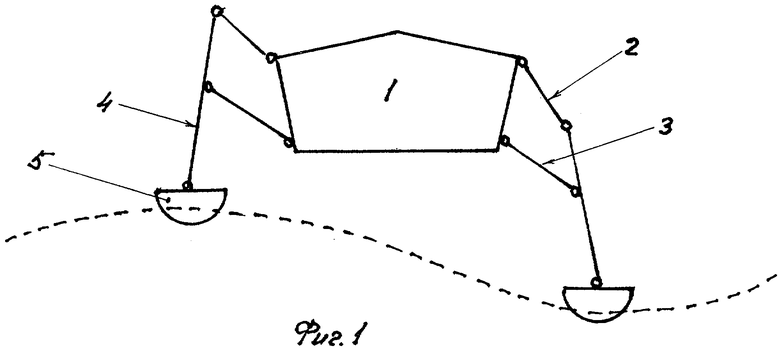
1. Адаптивная плавучая платформа, состоящая из платформы, поплавков и их креплений к платформе, отличающаяся тем, что крепления поплавков выполнены подвижными в вертикальном или близком к вертикальному дугообразном направлении, причем каждое крепление имеет гидроцилиндр, соединенный трубопроводом и реверсивным гидронасосом с двумя соседними гидроцилиндрами и/или с одним или двумя противоположными гидроцилиндрами, или со всеми остальными гидроцилиндрами, а насосы управляются от гироскопического датчика, расположенного на платформе.
2. Платформа по п.1, отличающаяся тем, что площади сечения гидроцилиндров пропорциональны нагрузке от платформы на соответствующие поплавки или части поплавков.
3. Платформа по п.1, отличающаяся тем, что крепления поплавков соединены с гидроцилиндрами посредством жестких или гибких тяг.
4. Платформа по п.1, отличающаяся тем, что на трубопроводах имеются краны.
5. Платформа по п.1, отличающаяся тем, что подвижные крепления поплавков представляют собой скользящие профилированные штоки, расположенные в вертикальных направляющих.
6. Платформа по п.1, отличающаяся тем, что подвижные крепления поплавков представляют собой трапециевидный или четырехзвенный рычажный механизм (см. фиг.1-3), состоящий из стойки 4, двух поперечных рычагов 2 и 3, и из боковой части платформы 1, причем поперечные рычаги крепятся к платформе плоскими шарнирами с горизонтальными осями, а к стойке - плоскими или шаровыми шарнирами.
7. Платформа по п.6, отличающаяся тем, что стойка крепится к поплавку плоским шарниром с горизонтальной осью, поперечной длинной стороне поплавка, или шаровым шарниром, расположенным не выше центра плавучести поплавка.
8. Платформа по п.6, отличающаяся тем, что поплавок имеет в сечении форму круга или части круга.
9. Платформа по п.1, отличающаяся тем, что поплавок крепится к платформе двумя или более креплениями, причем рычаги одного крепления крепятся к платформе двумя плоскими шарнирами, а рычаги остальных креплений крепятся к платформе одним плоским шарниром и одним шаровым.
10. Платформа по п.9, отличающаяся тем, что поплавок имеет удлиненную форму.
11. Платформа по п.6, отличающаяся тем, что длина и местоположение одного из рычагов находятся путем задания поплавку отклонения по вертикали от среднего положения, исходя из неизменности длин другого рычага и стойки, причем через получившиеся точки верхнего конца стойки проводится приблизительная окружность, центр которой является вторым концом искомого рычага.
| US 4718368 А, 12.01.1988 | |||
| JP 10016828 А, 20.01.1998 | |||
| ПОПЛАВКОВОЕ СУДНО | 1993 |
|
RU2065370C1 |
| US 3981259 А, 21.09.1976 | |||
| Стабилизирующее устройство судна | 1972 |
|
SU493397A1 |
| Крутосклонный трактор | 1975 |
|
SU572396A1 |

