Система построения местной вертикали космического объекта при орбитальной ориентации предназначена для применения в системах управления движением (СУД) космического аппарата (КА).
Во время орбитального полета КА при совершении различных маневров требуется знание положения осей КА в пространстве, в частности одной из осей КА относительно местной вертикали MB.
В качестве аналогов системы построения местной вертикали можно привести системы и способы, где используется знание или построение MB, описанные в ряде патентов, приведенных ниже:
Патент РФ №2021173 (МПК B64G 1/24) - в данном патенте описан способ ориентации на планету с использованием инфракрасного построителя вертикали (ИКВ), знания на определенный момент времени взаимного положения Земли, Солнца, КА и последующих программных разворотов КА.
Патент РФ №2021174 (МПК B64G 1/24) - способ аналогичный предыдущему (№2021173).
Патент РФ №2034755 (МПК B64G 1/34) - в данном патенте описан способ использования сил гравитации для стабилизации КА за счет измерения параметров колебаний специальной гравитационной штанги.
Патент РФ №2205139 (МПК B64G 1/26) - в данном патенте описан способ управления пилотируемым космическим аппаратом (ПКА), отстыкованным от находящегося на околоземной орбите неориентированного КА, заключающегося в построении местной вертикали, совпадающей с осью визуального наблюдения, путем последовательных разворотов ПКА вокруг собственных осей, перпендикулярных оси визуального наблюдения.
Патент РФ №2340518 (МПК B64G 1/44) - в данном патенте описан способ с использованием углов: полураствора Земли и направления на Солнце, а также максимальной эффективности солнечных батарей (вырабатываемого электрического тока).
Заявка на патент РФ №96114082 (МПК B64G 1/62) - в данной заявке на патент описан способ одноосной гравитационной ориентации с использованием специального выдвигаемого гравитационного стержня с последующим измерением изменившегося положения центра масс.
Заявка на патент РФ №2006106871 (МПК B64G 1/00) - в данной заявке на патент описан способ управления ориентацией орбитального КА с инерционными исполнительными органами при зондировании атмосферы Земли. В данном способе измеряют высоту орбиты и по ней определяют угол от направления на центр Земли (MB) и до исследуемого слоя атмосферы Земли с использованием угла направления на Солнце, а также моментов инерции КА в процессе сеанса зондирования.
Заявка на патент РФ №2006118382 (МПК B64G 1/62) - в данной заявке на патент описан способ и устройство для одноосной гравитационной ориентации КА. В данном способе путем разворотов солнечных батарей и КА достигается максимальная выработка энергии солнечными батареями, которая зависит от взаимного положения КА, батарей, Солнца и MB.
Заявка на патент РФ №2006132148 (МПК B64G 1/24) - в данной заявке на патент описан способ управления геостационарного КА с использованием излучения радиомаяка на КА и нескольких приемных антенн, расположенных определенным образом на поверхности Земли, отвечающих требуемой ориентации КА. Путем обработки принимаемых антеннами сигналов от радиомаяка и коррекцией положения КА по этим данным достигается требуемая ориентация КА относительно MB.
В патентах РФ №2021173, №2021174, №2205139, №2340518, заявке на патент РФ №2006118382 при построении или использовании MB необходимо наличие видимости Солнца (день). В патенте РФ №2034755 и заявке на патент РФ №96114082 описано применение специальных датчиков, использующих силы гравитации. В заявке на патент РФ №2006132148 необходимо наличие приемных радиоантенн на Земле и канала связи КА с наземным комплексом.
В качестве прототипа системы построения местной вертикали можно привести визуальный прибор ВСК-4, используемый на пилотируемых транспортных космических кораблях типа СОЮЗ. Это оптический визир, имеющий канал курса и канал вертикали. Канал вертикали, содержащий восемь периферийных оптических систем, проецирующих изображения участков горизонта Земли на экран с сеткой в виде окружности, которая при построенной MB совпадает с изображением линии горизонта. Недостатком данного прибора является возможность работы только на дневной стороне и только с участием оператора. Подобные оптические визиры описаны в книге: Оптико-механические приборы / авторы: С.В.Кулагин, А.С.Гоменюк, В.Н.Дикарев, В.Е.Зубарев, Е.Н.Лебедев, Г.М.Мосягин.
Задачей изобретения является построение местной вертикали в автоматическом режиме.
Эта задача достигается тем, что используется система построения местной вертикали космического объекта при орбитальной ориентации, содержащая оптическую систему, устройство для определения углов отклонения оси космического объекта от местной вертикали, причем в канал тангажа введены первый и второй фотоприемники, первый и второй блоки определения скоростей смещения изображения подстилающей поверхности, блок определения отношения скоростей смещения изображения подстилающей поверхности в канале тангажа, при этом входы первого и второго фотоприемников канала тангажа оптически связаны с выходом оптической системы, а выходы первого и второго фотоприемников канала тангажа через первый и второй блоки определения скоростей смещения изображения подстилающей поверхности в канале тангажа соответственно подключены к блоку определения отношения скоростей смещения изображения подстилающей поверхности в канале тангажа, выход которого подключен к устройству определения углов отклонения оси космического аппарата от местной вертикали по тангажу и крену; в канал крена введены первый и второй фотоприемники канала крена, первый и второй блоки определения скоростей смещения изображения подстилающей поверхности в канале крена, блок определения отношения скоростей смещения изображения подстилающей поверхности в канале крена, при этом входы первого и второго фотоприемников канала крена оптически связаны с выходом оптической системы, а выходы первого и второго фотоприемников канала крена через первый и второй блоки определения скоростей смещения изображения подстилающей поверхности в канале крена соответственно подключены к входу блока определения отношений скоростей смещения изображения подстилающей поверхности в канале крена, выход которого подключен к входу устройства определения углов отклонения оси космического объекта от местной вертикали по тангажу и крену.
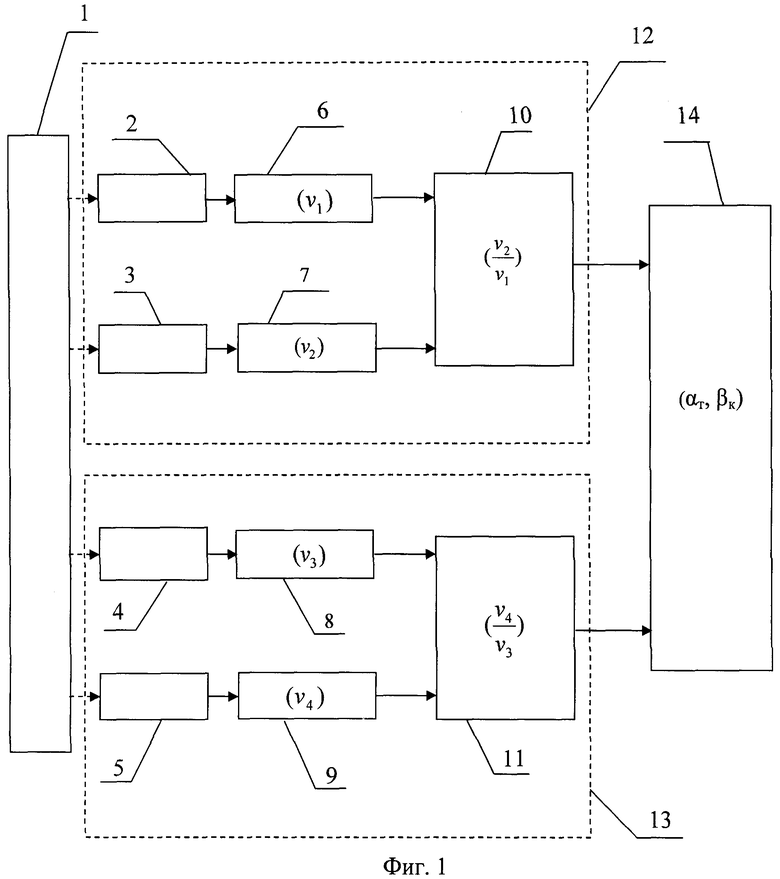
На фиг.1 представлена схема системы построения местной вертикали КА при орбитальной ориентации; на фиг.2 изображена схема, поясняющая взаимное положение осей КА, орбиты КА, местной вертикали (MB), а также точек на подстилающей поверхности, скорости смещения изображения которых используется для определения углов отклонения оси КА от MB; на фиг.3 и фиг.4 приведены в качестве примера таблицы отношений скоростей смещения изображений заданных точек подстилающей поверхности в зависимости от углов отклонений оси КА от MB по углам крена и тангажа.
На фигурах изображено:
1 - оптическая система (ОС),
2 - первый фотоприемник канала тангажа (ПФПКТ),
3 - второй фотоприемник канала тангажа (ВФПКТ),
4 - первый фотоприемник канала крена (ПФПКК),
5 - второй фотоприемник канала крена (ВФПКК),
6 - первый блок определения скорости смещения изображения канала тангажа (ПБОССИКТ),
7 - второй блок определения скорости смещения изображения канала тангажа (ВБОССИКТ),
8 - первый блок определения скорости смещения изображения канала крена (ПБОССИКК),
9 - второй блок определения скорости смещения изображения канала тангажа (ВБОССИКК),
10 - блок определения отношений скоростей смещения изображения канала тангажа (БООССИКТ),
11 - блок определения отношений скоростей смещения изображения канала крена (БООССИКК),
12 - канал тангажа (КТ),
13 - канал крена (КК),
14 - устройство определения углов отклонений оси КА от MB по крену и тангажу (УОУОКТ),
15 - космический аппарат (КА),
16 - траектория движения КА,
17 - система координат КА (OX, OY, OZ - оси КА),
18 - орбитальная скорость КА  ,
,
19 - местная вертикаль (MB),
20 - след плоскости орбиты на подстилающей поверхности,
21 - подспутниковая точка (п.т.),
22 - точка подстилающей поверхности (m0), через которую проходит линия, параллельная оси OY и совпадающая с оптической осью оптической системы,
23, 24 - точки (m1, m2) на подстилающей поверхности, являющиеся точками пересечения плоскости тангажа (XOY) с подстилающей поверхностью и поверхностью кругового конуса, ось которого совпадает с оптической осью оптической системы,
25, 26 - точки (m3, m4) на подстилающей поверхности, являющиеся точками пересечения плоскости крена (YOZ) с подстилающей поверхностью и поверхностью кругового конуса, ось которого совпадает с оптической осью оптической системы.
27 - угол тангажа (αт),
28 - угол крена (βк),
29 - точка (Р) пересечения следа плоскости орбиты с плоскостью крена (YOZ).
Система построения местной вертикали космического объекта при орбитальной ориентации (см. фиг.1) включает в себя оптическую систему (ОС) (1), канал тангажа (КТ) (12), канал крена (КК) (13) и устройство определения углов отклонения оси КА от MB по крену и тангажу (УОУОКТ) (14). В канале тангажа (КТ) (12) и в канале крена (КК) (13) имеются фотоприемники: ПФПКТ (2), ВФПКТ (3) и ПФПКК (4), ВФПКК (5) соответственно, и все они оптически связаны с оптической системой (1). Электрический выход каждого фотоприемника связан с входом соответствующего блока определения скорости смещения изображения, т.е. выход ПФПКТ (2) связан с входом ПБОССИКТ (6), выход ВФПКТ (3) связан с входом ВБОССИКТ (7), выход ПФПКК (4) связан с входом ПБОССИКК (8), выход ВФПКК (5) связан с входом ВБОССИКК (9). Электрические выходы блоков определения скоростей смещения изображения в каналах тангажа и крена связаны с входами соответствующих блоков определения отношений этих скоростей, т.е. выходы блоков ПБОССИКТ (6) и ВБОССИКТ (7) связаны с входами блока БООССИКТ (10), а выходы блоков ПБОССИКК (8) и ВБОССИКК (9) связаны с входами блока БООССИКК (11). Выходы блоков определения отношений скоростей смещения изображения БООССИКТ (10) и БООССИКК (11) связаны с входами устройства определения углов отклонения оси КА от MB по тангажу и крену (УОУОКТ) (14).
Работа системы построения местной вертикали космического объекта при орбитальной ориентации производится следующим образом:
Оптическая система (ОС) (1) строит изображение подстилающей поверхности в фокальной плоскости, где расположены чувствительные поверхности фотоприемных устройств ПФПКТ (2) и ВФПКТ (3) канала тангажа (КТ) (12), ПФПКК (4) и ВФПКК (5) канала крена (КК) (13). Точки m1 (23) и m2 (24) подстилающей поверхности оптически сопряжены с центрами фотоприемных устройств ПФПКТ (2) и ВФПКТ (3) канала тангажа (КТ) (12), а точки m3 (25) и m4 (26) подстилающей поверхности оптически сопряжены с центрами фотоприемных устройств ПФПКК (4) и ВФПКК (5) канала крена (КК) (13). В блоках ПБОССИКТ (6), ВБОССИКТ (7), ПБОССИКК (8), ВБОССИКК (9) по электрическим сигналам с фотоприемников определяют значения скоростей смещения изображения. Эти значения в виде электрических сигналов (информационных потоков) в каналах тангажа (КТ) (12) и крена (КК) (13) поступают в соответствующие блоки определения отношений скоростей смещения изображения БООССИКТ (10) и БООССИКК (11). С выходов блоков БООССИКТ (10) и БООССИКК (11) электрические сигналы, соответствующие значениям отношений скоростей смещения изображения в каналах тангажа (КТ) (12) и крена (КК) (13), поступают в устройство УОУОКТ (14), которое определяет углы отклонения оси - Y КА (15) от MB (19). Определение углов производится путем интерполяции отношений скоростей, поступивших с блоков БООССИКТ (10) и БООССИКК (11) с табличными данными, заложенными в устройство УОУОКТ (14) заранее.
Пример табличных данных соответствия углов отклонения оси - Y КА (15) от MB (19) и отношений скоростей смещения изображения, рассчитанных для высоты орбиты 400 км и угловых расстояниях точек m1 (23), m2 (24), m3 (25), m4 (26) от оптической оси 15°, показан на фиг.3, фиг.4.
Например, если на устройство УОУОКТ (14) поступили следующие данные:
отношения скоростей смещения изображения для точек m1 и m2 равно ≈1,35, а для точек m3 и m4 равно ≈1,11, то в соответствии с таблицей 1, см. фиг.3, получим угол отклонения оси - Y КА (15) по тангажу ≈15°, а угол отклонения оси - Y КА (15) по крену ≈11°.
Для обеспечения работы системы как на дневном, так и на ночном участках орбиты фотоприемные устройства в блоках определения скоростей смещения изображения подстилающей поверхности содержат чувствительные элементы (матрицы), работающие в видимом и инфракрасном (тепловом) диапазонах спектра. Таким образом, предлагаемая система позволяет построить местную вертикаль в автоматическом режиме и на любом участке орбиты.



Изобретение относится к области управления движением космического аппарата (КА). Система содержит оптическую систему с фотоприемниками каналов тангажа и крена, а также устройство определения углов отклонения оси КА от местной вертикали в этих каналах. В системе применены фотоприемники как видимого, так и теплового (инфракрасного) диапазонов длин волн. По сигналам с фотоприемников определяются скорости смещения изображения подстилающей поверхности для пар точек в канале тангажа и пар точек в канале крена. По вычисленным затем отношениям этих скоростей определяются углы отклонения оси КА от местной вертикали в соответствующих каналах. Техническим результатом изобретения является построение местной вертикали в автоматическом режиме, на любом участке орбиты (как на дневной, так и теневой ее стороне). 4 ил. 1 табл.
Система построения местной вертикали космического объекта при орбитальной ориентации, содержащая оптическую систему, устройство для определения углов отклонения оси космического объекта от местной вертикали, отличающаяся тем, что в канал тангажа введены первый и второй фотоприемники, первый и второй блоки определения скоростей смещения изображения подстилающей поверхности, блок определения отношения скоростей смещения изображения подстилающей поверхности в канале тангажа, при этом входы первого и второго фотоприемников канала тангажа оптически связаны с выходом оптической системы, а выходы первого и второго фотоприемников канала тангажа через первый и второй блоки определения скоростей смещения изображения подстилающей поверхности в канале тангажа соответственно подключены к блоку определения отношения скоростей смещения изображения подстилающей поверхности в канале тангажа, выход которого подключен к устройству определения углов отклонения оси космического объекта от местной вертикали по тангажу и крену; в канал крена введены первый и второй фотоприемники канала крена, первый и второй блоки определения скоростей смещения изображения подстилающей поверхности в канале крена, блок определения отношения скоростей смещения изображения подстилающей поверхности в канале крена, при этом входы первого и второго фотоприемников канала крена оптически связаны с выходом оптической системы, а выходы первого и второго фотоприемников канала крена через первый и второй блоки определения скоростей смещения изображения подстилающей поверхности в канале крена соответственно подключены к входу блока определения отношений скоростей смещения изображения подстилающей поверхности в канале крена, выход которого подключен к входу устройства определения углов отклонения оси космического объекта от местной вертикали по тангажу и крену.
| КАРГУ Л.И | |||
| Измерительные устройства летательных аппаратов | |||
| - М.: Машиностроение | |||
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА НА ПЛАНЕТУ | 1991 |
|
RU2021173C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА С ОПТИЧЕСКОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2004 |
|
RU2280590C2 |
| US 5546309 А, 13.08.1996 | |||
| US 7472032 A, 30.12.2008 | |||
| US 6389354 A, 14.05.2002. | |||

