Изобретение относится к области навигации и управления ориентацией космического аппарата (КА).
Во время орбитального полета КА при совершении различных маневров требуется знание положения осей связанной системы координат (СК) в пространстве, в частности, при съемке подстилающей поверхности критически важным является направление оси визирования (ОВ), которая, как правило, должна совпадать с местной вертикалью (MB).
В качестве аналогов способа определения направления на местную вертикаль и устройства для его осуществления можно привести способы и устройства, использующие знание или построение MB, описанные в ряде патентов.
Известен способ, описанный в патенте РФ №2400406 (МПК B64G 1/24, опубл. 27.09.2010 г.), включающий анализ сигналов с фотоприемников. При этом определение направления на MB производится с использование ориентиров на подстилающей поверхности посредством сравнения их относительной скорости движения.
Недостатком данного способа является невозможность определения направления на местную вертикаль в условиях отсутствия наземных ориентиров, например при пролете над открытым океаном.
Наиболее близким к предлагаемому устройству является система построения местной вертикали космического объекта при орбитальной ориентации, описанная в патенте РФ №2021173 (МПК B64G 1/24, опубл. 15.10.1994 г.), включающая оптическую систему с фотоприемниками каналов тангажа и крена, а также устройство определения направления на местную вертикаль
Недостатком данного устройства является невозможность определения направления на местную вертикаль в условиях засветки при попадании солнца в поле зрения фотоприемника, а также невозможность ориентации продольной оси аппарата по местной вертикали небесных тел, имеющих низкое инфракрасное излучение.
В основу изобретения поставлена задача создания легкого, малогабаритного построителя местной вертикали с низким энергопотреблением для наноспутника.
Технический результат достигается тем, что в способе определения отклонения продольной оси наноспутника класса CubeSat от местной вертикали, основанном на анализе сигналов с фотоприемников и определении направления на местную вертикаль, производится анализ выделенных на изображениях границ горизонта Земли, используя четыре фотоприемника, ортогонально расположенных по отношению к боковым граням наноспутника.
Технический результат также достигается тем, что в устройстве определения отклонения продольной оси наноспутника класса CubeSat от местной вертикали, включающем оптическую систему с фотоприемниками каналов тангажа и рысканья, а также устройство определения отклонения от местной вертикали, одновременно используются четыре фотоприемника, расположенных на боковых гранях наноспутника класса CubeSat с возможностью исключения одновременной засветки всех фотоприемников, при этом оси визирования фотоприемников принадлежат одной плоскости, ортогональной продольной оси наноспутника.
Также технический результат может быть достигнут тем, что в устройстве определения отклонения продольной оси наноспутника класса CubeSat от местной вертикали, включающем оптическую систему с фотоприемниками каналов тангажа и рысканья, а также устройство определения отклонения от местной вертикали, одновременно используются четыре фотоприемника, расположенных на боковых гранях наноспутника класса CubeSat с возможностью исключения одновременной засветки всех фотоприемников, при этом оси визирования фотоприемников не принадлежат одной плоскости.
Изобретение иллюстрируется следующими чертежами:
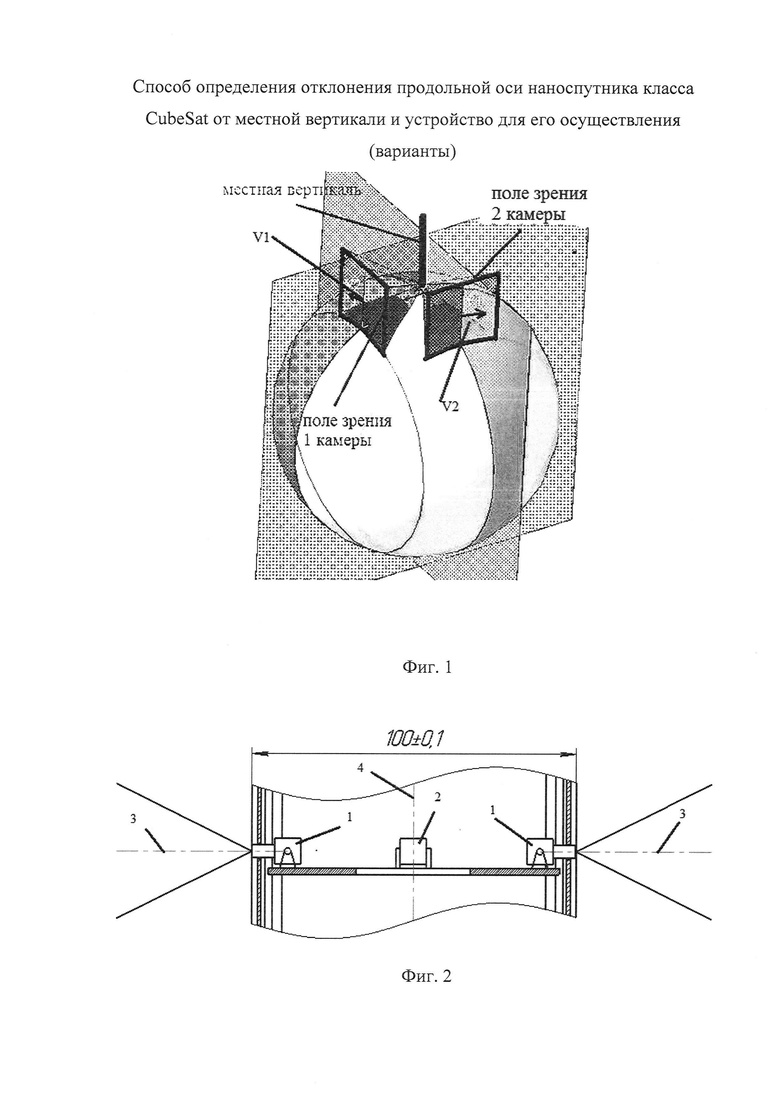
на фиг. 1 представлена схема построения местной вертикали;
на фиг. 2 представлен первый вариант устройства;
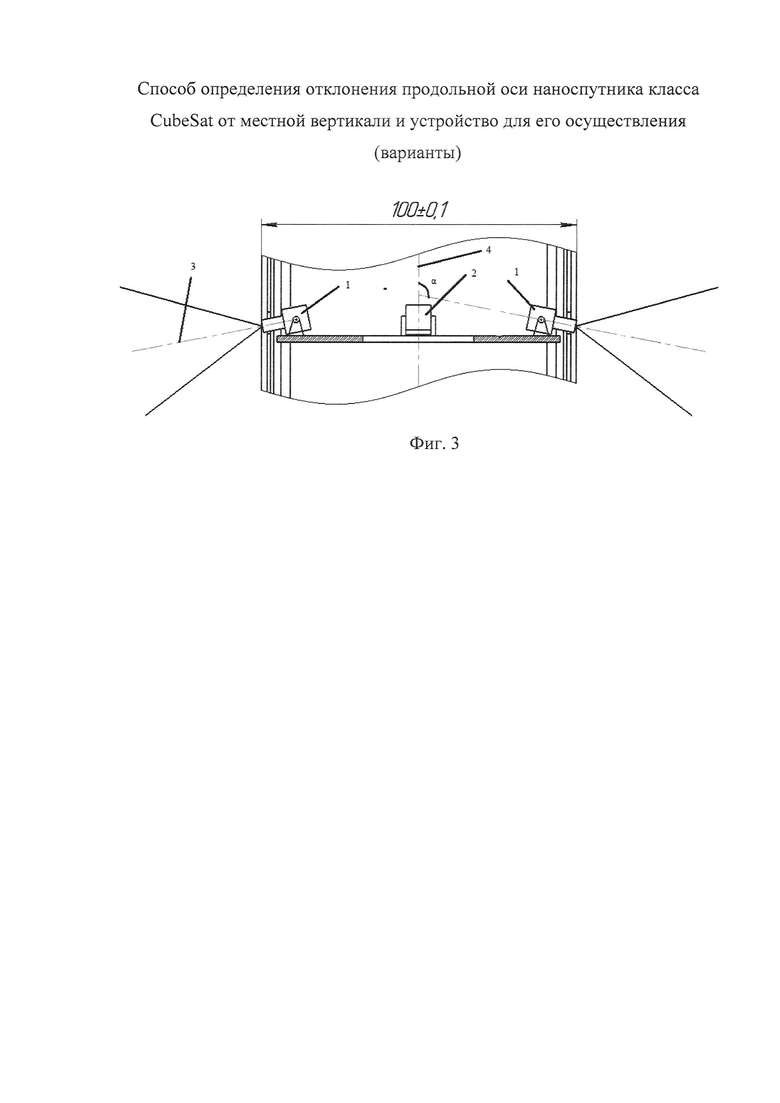
на фиг. 3 представлен второй вариант устройства.
При этом параметры фотоприемной матрицы, объектива и угол установки выбираются исходя из параметров орбиты и требований по точности определения отклонения продольной оси от местной вертикали.
Для определения отклонения продольной оси наноспутника класса CubeSat от местной вертикали из изображения на фотоприемной ПЗС матрице выделяется линия горизонта Земли. Выделение линии горизонта Земли на изображении производится путем применения детектора границ Канни. После выделения линии горизонта Земли на полученном изображении определяется радиус кривизны и центр дуги, являющейся линией горизонта Земли. Крайние точки дуги являются точками начала и конца вектора. Данный вектор V1 является перпендикуляром к плоскости, проходящей через центр Земли и центр масс наноспутника класса CubeSat. Аналогичные вычисления производятся и на втором изображении (вычисляется вектор V2). Векторное произведение двух векторов V1 и V2 дает вектор направления на центр Земля в связанной с наноспутником системе координат.
Устройство определения отклонения продольной оси наноспутника класса CubeSat от местной вертикали по анализу изображений Земли может быть реализовано в двух вариантах.
Первый вариант представляет собой устройство, состоящее из фотоприемников канала тангажа 1, фотоприемников канала рысканья 2 и бортового вычислительного устройства. Фотоприемники расположены таким образом, что их оси визирования 3 перпендикулярны между собой и лежат в одной плоскости, ортогональной продольной оси наноспутника 4.
Второй вариант представляет собой устройство, состоящее из фотоприемников канала тангажа 1, фотоприемников канала рысканья 2 и бортового вычислительного устройства. Фотоприемники расположены таким образом, что их оси визирования 3 не перпендикулярны между собой и не лежат в одной плоскости. Оси визирования фотоприемников устанавливаются таким образом, что составляют определенный угол α с продольной осью наноспутника 4.
Предлагаемый способ и устройства определения отклонения продольной оси наноспутника класса CubeSat от местной вертикали по анализу изображений группы специально размещенных фотоприемников, по сравнению с известными техническими решениями, расширяют функционально-эксплуатационные возможности наноспутников класса CubeSat в области систем управления движением, а также предоставляют возможность попутного наблюдения за Земной поверхностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ ЗЕМЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814305C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА "ГАСАД" | 1993 |
|
RU2033949C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА, ОСНАЩЕННОГО РАДИОМАЯКОМ | 2006 |
|
RU2354590C2 |
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814307C1 |
| Способ построения местной вертикали | 2022 |
|
RU2798264C1 |
| Способ построения местной вертикали и устройство для его осуществления | 2017 |
|
RU2664914C1 |
| СИСТЕМА ПОСТРОЕНИЯ МЕСТНОЙ ВЕРТИКАЛИ КОСМИЧЕСКОГО ОБЪЕКТА ПРИ ОРБИТАЛЬНОЙ ОРИЕНТАЦИИ | 2009 |
|
RU2400406C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2006 |
|
RU2318188C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ НА ОСНОВЕ ВИРТУАЛЬНЫХ ИЗМЕРЕНИЙ ЗЕНИТНЫХ РАССТОЯНИЙ ЗВЕЗД | 2010 |
|
RU2454631C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА НА ПЛАНЕТУ | 1991 |
|
RU2021173C1 |
Группа изобретений относится к управлению ориентацией космических аппаратов, преимущественно пико- и наноспутников (класса CubeSat). Способ осуществляется устройством, включающим в себя оптическую систему с фотоприемниками каналов тангажа и рысканья, а также средство определения отклонения продольной оси наноспутника от местной вертикали. Это отклонение устанавливается по анализу изображений линии горизонта планеты (Земли) группой фотоприемников, размещенных на боковых гранях корпуса наноспутника. Техническим результатом является создание легкого малогабаритного построителя местной вертикали с низким энергопотреблением и точностью, сравнимой с инфракрасными построителями местной вертикали. 3 н.п. ф-лы, 3 ил.
1. Способ определения отклонения продольной оси наноспутника класса CubeSat от местной вертикали, основанный на анализе сигналов с фотоприемников и определении направления на местную вертикаль, отличающийся тем, что производят анализ выделенных на изображениях границ горизонта Земли, используя четыре фотоприемника, ортогонально расположенных по отношению к боковым граням наноспутника.
2. Устройство определения отклонения продольной оси наноспутника класса CubeSat от местной вертикали, включающее оптическую систему с фотоприемниками каналов тангажа и рысканья, а также устройство определения отклонения от местной вертикали, отличающееся тем, что в устройстве одновременно используются четыре фотоприемника, расположенных на боковых гранях наноспутника класса CubeSat с возможностью исключения одновременной засветки всех фотоприемников, при этом оси визирования фотоприемников принадлежат одной плоскости, ортогональной продольной оси наноспутника.
3. Устройство определения отклонения продольной оси наноспутника класса CubeSat от местной вертикали, включающее оптическую систему с фотоприемниками каналов тангажа и рысканья, а также устройство определения отклонения от местной вертикали, отличающееся тем, что в устройстве одновременно используются четыре фотоприемника, расположенных на боковых гранях наноспутника класса CubeSat с возможностью исключения одновременной засветки всех фотоприемников, при этом оси визирования фотоприемников не принадлежат одной плоскости.
| СИСТЕМА ПОСТРОЕНИЯ МЕСТНОЙ ВЕРТИКАЛИ КОСМИЧЕСКОГО ОБЪЕКТА ПРИ ОРБИТАЛЬНОЙ ОРИЕНТАЦИИ | 2009 |
|
RU2400406C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ РАЗЛИЧНЫХ ПОЛЕЙ ЗРЕНИЯ | 2012 |
|
RU2505844C2 |
| US 4084772 А, 18.04.1978 | |||
| ПИКОСПУТНИК | 2014 |
|
RU2550241C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА НА ПЛАНЕТУ | 1991 |
|
RU2021173C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ АСТРОИСТОЧНИКА, ПРЕИМУЩЕСТВЕННО ЗЕМЛИ И/ИЛИ СОЛНЦА | 1997 |
|
RU2131586C1 |

