Изобретение относится к машиностроению, а именно к механизмам для преобразования вращательного движения в поступательное.
Известна выдвижная антенна транспортного средства (заявка №97102397), включающая корпус, в котором размещен электродвигатель, редуктор привода выдвижной части, включающий барабан с тросом, связанным с выходной частью, кабель связи и элементы крепления к корпусу транспортного средства, редуктор привода выдвижной части выполнен червячным, червячное колесо которого взаимодействует с валом барабана через фрикционную муфту, при этом рабочие поверхности червячного колеса и фрикционной муфты взаимодействуют между собой посредством выполненных на них совокупностей выступов и впадин, а барабан выполнен из двух обойм, в полости между которыми размещен упругий трос, один конец которого заправлен в барабан с возможностью относительного линейного перемещения между его обоймами, а другой конец прикреплен к верхнему колену выдвижной части, выполненной телескопической, при этом колена выдвижной части снабжены пружинными контактами, обеспечивающими их электрическое взаимодействие между собой, а кабель связи снабжен пружинным контактом, взаимодействующим с нижним коленом выдвижной части.
Недостаток аналога заключается в его сложности из-за наличия в нем барабана с валом и тросом, фрикционной муфты. В связи с этим он обладает увеличенной массой, увеличенными габаритами, недостаточной надежностью точности работы. Его металлическая конструкция подвержена температурным деформациям, приводящим к появлению люфтов между подвижными элементами при неравномерных тепловых воздействиях на конструкцию. Это усугубляется еще и тем, что между подвижными элементами должно быть пространство (щель) для прохождения троса и расположения роликов
Известен шариковый выдвижной механизм (а.с. №1581941, М. кл. F16H 25/22), содержащий винт, гайку, шарики и устройство для циркуляции шариков в виде вкладышей с каналами возврата, снабженными на входе и выходе идентичными участками. Особенность устройства заключается в том, что идентичные участки канала возврата в продольном сечении направлены по касательной к поверхности наружного цилиндра резьбы гайки.
Недостаток данного прототипа заключается в том, что оно обладает повышенной массой, так как его конструкция предполагает выполнение винта, гайки и шариков из стали для обеспечения прочности. Это связано с тем, что при его работе возникают большие механические нагрузки на края каналов винта и гайки от шариков, через которые они взаимодействуют и которые работают с напряжением в сторону выхода из каналов. Кроме того, прототип не обладает достаточно высокой точностью работы в условиях переменных температурных нагрузок на него с разных сторон, так как при этом необходимо обеспечивать увеличение зазоров между взаимодействующими элементами для исключения их заклинивания при неравномерных температурных расширениях. Наличие зазоров между взаимодействующими элементами значительно ухудшает точность выдвижения и фиксацию конца винта.
В качестве прототипа выбран «Винтовой механизм», патент РФ №2291994. Недостаток прототипа заключается в его недостаточно высоких характеристиках по габаритно-массовым параметрам, по точности работы винтового механизма, по относительному увеличению его рабочей длины (по отношению длины выдвинутой штанги к высоте устройства в сложенном состоянии для транспортирования), по надежности. Причиной этому является его сложность и несовершенство принятых частных решений. Так, например, трубчатая выдвижная штанга выполнена с наружными роликами, взаимодействующими с винтом и направляющими штанги. При этом, чтобы исключить возможность заклинивания при движении штанги, взаимодействие элементов осуществляется с определенными зазорами, суммарный эффект которых существенно ухудшает точность работы устройства. Кроме того, прототип не содержит устройства жесткой фиксации штанги при полностью выдвинутом ее положении.
Задача изобретения - улучшение габаритно-массовых характеристик, повышение надежности и точности работы винтового механизма, увеличение его относительной рабочей длины по сравнению с линейным размером в сложенном его положении (транспортируемом).
Поставленная задача достигнута за счет того, что гайка неподвижно закреплена на нижнем фланце выдвижной штанги, выполненной с наружной ее стороны, а винт закреплен одним своим концом с возможностью его вращения на верхнем фланце корпуса, выполненного с внутренней его стороны, а другим своим концом он выполнен выходящим из гайки наружу нижнего фланца выдвижной штанги и связан с выходным валом шестеренчатого электропривода, причем боковые поверхности указанных фланцев, обращенные к стенкам соответственно корпуса и выдвижной трубчатой штанги, выполнены подвижно сопряженными с ними; торцевые поверхности верхнего внутреннего фланца корпуса и нижнего наружного фланца выдвижной штанги, обращенные друг к другу, выполнены сопряженными при полностью выдвинутой наружу выдвижной штанги; закрепление шестеренчатого привода на нижнем наружном фланце корпуса выполнено посредством вновь введенной балки, жестко связанной своими концами с его диаметрально расположенными участками; винт и фланцы секций, как и их боковые стенки, выполнены из органопластика (кевлара) или углепластика, причем наружная поверхностью винта с резьбой выполнена из металла; винтовой механизм выполнен с дополнительной парой винта и гайки, установленной аналогично основной паре с диаметрально противоположной стороны относительно стенок корпуса и выдвижной штанги, а связь другого конца дополнительного винта выполнена с дополнительным выходным валом электропривода, который выполнен с противоположной стороны, относительно его основного выходного вала.
Суть технического решения заключается в том, что вращение винта осуществляют в неподвижно закрепленной на нижнем наружном фланце выдвижной штанги гайке, один конец винта закреплен на верхнем внутреннем фланце корпуса с возможностью его вращения, а другой, выходящий из гайки наружу нижнего фланца выдвижной штанги, вращают связанным с ним выходным валом шестеренчатого электропривода, что позволило упростить винтовой механизм (исключить из состава выдвижной штанги наружные ролики, уменьшить габариты гайки и исключить из ее состава подшипники, исключить направляющие пазы для роликов) и тем самым улучшить его габаритно-массовые характеристики, и повысить надежность работы; корпус и выдвижная штанга выполнены соразмерными по высоте и в закрытом и раскрытом положении обеспечивают соответственно высоту корпуса и суммарную их высоту, что обеспечивает соответственно снижение габаритов устройства в сложенном положении и увеличение рабочей длины в раскрытом его положении.
Винтовой механизм представлен на фиг.1, 2, на которых он показан соответственно в сложенном состоянии и раскрытом. Винтовой механизм содержит цилиндрический корпус 1, внутри которого расположена выдвижная штанга 2, продольная ось которой совпадает с продольной осью корпуса и которые выполнены соответственно с верхними внутренними 3 и 4 нижними наружными 5 и 6 фланцами, винт 7 с гайкой 8, которая неподвижно закреплена на нижнем наружном фланце 6 выдвижной штанги 2, а винт 7 закреплен одним своим концом с возможностью его вращения на верхнем внутреннем фланце 3 корпуса 1, а другим своим концом винт 7 выполнен выходящим из гайки 8 наружу нижнего наружного фланца 6 выдвижной штанги 2 и связан с основным выходным валом 9 шестеренчатого электропривода 10, закрепленным на нижнем наружном фланце 5 корпуса 1 посредством балки 11, жестко связанной своими концами с его диаметрально расположенными участками.
Боковые поверхности верхнего внутреннего фланца 3 корпуса 1 и нижнего наружного фланца 6 выдвижной штанги 2, обращенные к стенкам соответственно выдвижной штанги 2 и корпуса 1, выполнены подвижно сопряженными с ними, а торцевые поверхности фланцев 3 и 6, обращенные друг к другу, выполнены сопряженными при полностью выдвинутой наружу выдвижной штанги 2.
Винт 7 и фланцы 3, 5 и 4, 6 соответственно корпуса 1 и выдвижной штанги 2, как и боковые стенки последних, выполнены из органопластика (кевлара) или углепластика, причем наружная поверхностью винта 7 с резьбой выполнена из металла.
Винтовой механизм выполнен с дополнительной парой винта 12 и гайки 13, установленной аналогично основной паре с диаметрально противоположной стороны относительно стенок корпуса 1 и выдвижной штанги 2, а связь другого конца дополнительного винта 12 выполнена с дополнительным выходным валом 14 шестеренчатого электропривода 10, который расположен с противоположной стороны, относительно его основного выходного вала 9.
Конструкция закрепления винта 7 одним своим концом на верхнем внутреннем фланце 3 корпуса 1 с возможностью его вращения показана на разрезе (см. фиг.1). Фланец винта 7 своими двумя противоположными сторонами установлен на опорные подшипники 15, выполненные со съемной крышкой 16, позволяющей устанавливать винт 7 при сборке устройства.
Устройство работает следующим образом. Для раскрытия винтового механизма (перевода его из положения, показанного на фиг.1, в положение, показанное на фиг.2) шестеренчатый электропривод 10 включается в работу с направлением его вращения, при котором гайки 8 и 13 вместе с фланцем 6 и выдвижной штангой 2 поднимаются вверх относительно корпуса 1. Максимальный подъем секции осуществляется до сопряжения обращенных друг к другу торцевых поверхностей фланцев 3 и 6.
Высокая точность работы устройства обеспечивается как в процессе выдвижения штанги 2, так и при жесткой фиксации ее при полностью выдвинутом положении за счет того, что боковые поверхности фланцев 3 и 6, обращенные соответственно к стенкам выдвижной штанги 2 и корпуса 1, выполнены сопряженными с ними и торцевые поверхности фланцев 3 и 6, обращенные друг к другу, выполнены также сопряженными и стягиваются друг с другом винтами 7 и 12. Так как затянутые винты 7 и 12 в своих гайках 8 и 13 усилием шестеренчатого привода 10 исключают возможность самопроизвольного ослабления затяжки, то это позволяет обеспечить надежную жесткую и точную фиксацию выдвижной штанги 2 в корпусе 1. При этом из устройства исключаются, как правило, не достаточно точные и надежные устройства зачековки.
Закрытие штанги осуществляется путем включения шестеренчатого электропривода 10 с направлением вращения его основного 9 и дополнительного 14 выходных валов в направлении, при котором гайки 8, 13 и выдвижная штанга 2 перемещаются в сторону фланца 5 (внутрь корпуса 1). Выключение шестеренчатого электропривода 10 в крайних положениях штанги можно осуществлять, например, с помощью концевых выключателей (не показаны).
Технический результат заключается в улучшении габаритно-массовых характеристик, повышении надежности и точности работы винтового механизма, увеличении его относительной рабочей длины по сравнению с линейным размером в сложенном его положении (транспортируемом).
Предложенное решение в настоящее время находится на рассмотрении при выпуске эскизного проекта и предполагается для применения на космическом аппарате для выдвижения его составных частей в рабочее положение после выведения на орбиту.
Из известных заявителю патентно-информационных источников не известна совокупность признаков, схожая с совокупностью признаков заявляемого решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВОЙ МЕХАНИЗМ | 2005 |
|
RU2291994C1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| ПОРТАТИВНАЯ СОЛНЕЧНАЯ ЭЛЕКТРОСТАНЦИЯ | 2013 |
|
RU2560653C2 |
| ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ТРАНСПОРТАБЕЛЬНОГО МОДУЛЯ-КОНТЕЙНЕРА | 2017 |
|
RU2657231C1 |
| Планетарный редуктор | 1990 |
|
SU1740827A1 |
| Устройство для смазки задвижек фонтанной арматуры на устье скважин | 2021 |
|
RU2752201C1 |
| ПЕРИФЕРИЙНЫЙ СТЫКОВОЧНЫЙ МЕХАНИЗМ | 2017 |
|
RU2657623C1 |
| БЕЗБАЛАНСИРНЫЙ СТАНОК-КАЧАЛКА | 2013 |
|
RU2534336C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| ПРИВОД УПРАВЛЕНИЯ ПРИСЛОННО-СДВИЖНОЙ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2792906C1 |

Изобретение относится к машиностроению, а именно к механизмам для преобразования вращательного движения в поступательное. Винтовой механизм содержит цилиндрический корпус, выполненный с верхним и нижним фланцами, винт с гайкой и шестеренчатый электропривод с выходным валом, закрепленный на нижнем фланце. Внутри цилиндрического корпуса расположена выдвижная штанга, продольная ось которой совпадает с продольной осью корпуса. Гайка неподвижно закреплена на нижнем фланце выдвижной штанги. Винт закреплен одним своим концом с возможностью его вращения на верхнем внутреннем фланце корпуса, а другим своим концом винт выполнен выходящим из гайки наружу нижнего наружного фланца выдвижной штанги и связан с основным выходным валом указанного электропривода. Боковые поверхности указанных фланцев, обращенные к стенкам соответственно корпуса и выдвижной штанги, выполнены подвижно сопряженными с ними. Механизм также содержит дополнительную пару винта и гайки, установленную аналогично основной паре с диаметрально противоположной стороны относительно стенок корпуса и выдвижной штанги. Один из концов дополнительного винта связан с дополнительным выходным валом указанного электропривода. Решение направлено на повышение надежности и точности работы механизма, улучшение габаритно-массовых характеристик механизма. 3 з.п. ф-лы, 2 ил.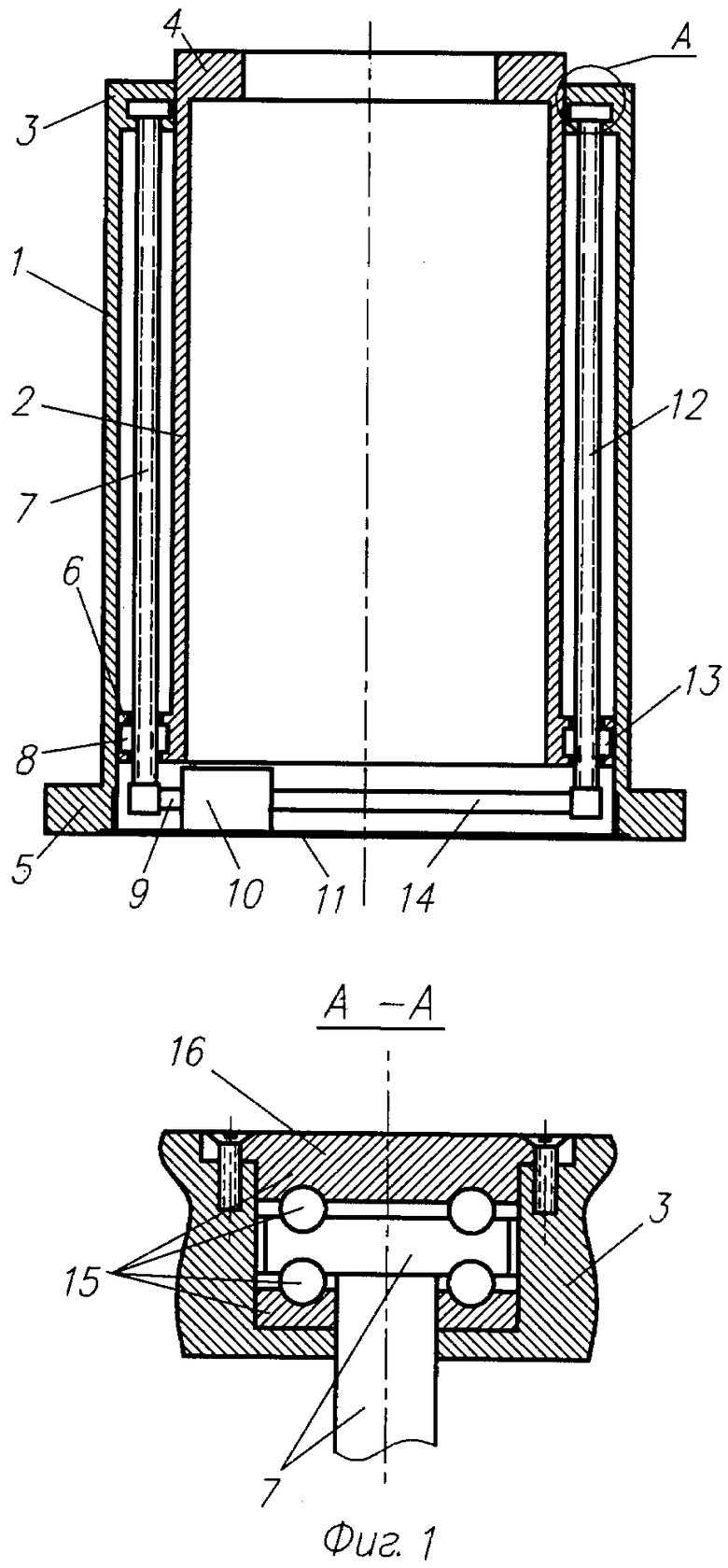
1. Винтовой механизм, содержащий цилиндрический корпус, выполненный с верхним и нижним фланцами, внутри которого расположена выдвижная штанга, продольная ось которой совпадает с продольной осью корпуса, винт с гайкой, а также шестеренчатый электропривод с выходным валом, закрепленный на нижнем фланце корпуса, отличающийся тем, что гайка неподвижно закреплена на нижнем фланце выдвижной штанги, выполненной с наружной ее стороны, а винт закреплен одним своим концом с возможностью его вращения на верхнем фланце корпуса, выполненного с внутренней его стороны, а другим своим концом он выполнен выходящим из гайки наружу нижнего фланца выдвижной штанги и связан с выходным валом шестеренчатого электропривода, боковые поверхности указанных фланцев, обращенные к стенкам соответственно корпуса и выдвижной штанги выполнены подвижно сопряженными с ними, причем винтовой механизм выполнен с дополнительной парой винта и гайки, установленными аналогично основной паре с диаметрально противоположной стороны относительно стенок корпуса и выдвижной штанги, а связь другого конца дополнительного винта выполнена с дополнительным выходным валом электропривода, который выполнен с противоположной стороны, относительно его основного выходного вала.
2. Винтовой механизм по п.1, отличающийся тем, что торцевые поверхности верхнего внутреннего фланца корпуса и нижнего наружного фланца выдвижной штанги, обращенные друг к другу, выполнены сопряженными при полностью выдвинутой наружу выдвижной штанге.
3. Винтовой механизм по пп.1, 2, отличающийся тем, что закрепление шестеренчатого привода на нижнем наружном фланце корпуса выполнено посредством вновь введенной балки, жестко связанной своими концами с его диаметрально расположенными участками.
4. Винтовой механизм по пп.1-3, отличающийся тем, что винт и фланцы секций, как и их боковые стенки, выполнены из органопластика (кевлара) или углепластика, причем наружная поверхностью винта с резьбой выполнена из металла.
| ВИНТОВОЙ МЕХАНИЗМ | 2005 |
|
RU2291994C1 |
| GB 1103616 А, 21.02.1968 | |||
| ПРЕОБРАЗОВАТЕЛЬ МЕХАНИЧЕСКОГО ВОЗДЕЙСТВИЯ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 1985 |
|
SU1387812A1 |
| US 2002162410 A1, 07.11.2002. | |||

