Настоящее изобретение касается способа калибровки масштабного коэффициента осесимметричного вибрационного гиродатчика угловой скорости.
Уровень техники
Как известно, изотропный вибрационный гиродатчик угловой скорости содержит осесимметричный резонатор с двумя степенями свободы.
Вибратор резонатора начинает совершать колебания с резонансной частотой вибратора под действием сигнала управления амплитудой. Для управления направлением колебаний на вибратор подают также сигнал управления прецессией таким образом, чтобы измерение колебаний вибратора и демодуляция этих колебаний с резонансной частотой вибратора позволили при помощи определенных уравнений определить скорость вращения резонатора.
Сигнал управления амплитудой и сигнал управления прецессией подают через управляющие электроды, имеющие коэффициент усиления возбуждения, который является соотношением между амплитудой силы, генерируемой сигналом управления, и амплитудой сигнала управления. Точно так же выходной сигнал измеряют при помощи детекторных электродов, имеющих коэффициент усиления детектора, который является соотношением между амплитудой колебаний и соответствующей амплитудой выходного сигнала.
Точность вычисления угловой скорости зависит от точности масштабного коэффициента резонатора, при этом масштабный коэффициент является отношением угловой скорости резонатора к сигналу управления прецессией или эквивалентным выходным сигналом.
Было установлено, что масштабный коэффициент изменяется в зависимости от температуры, действующей на резонатор, а также меняется во времени в зависимости от степени старения компонентов. Следовательно, эти изменения влияют на точность измерений.
Для повышения точности масштабного коэффициента в память блока обработки гиродатчика угловой скорости вводят таблицы, дающие изменения масштабного коэффициента в зависимости от температуры и в зависимости от срока службы резонатора. Во время использования гиродатчика угловой скорости измерение температуры позволяет таким образом осуществлять калибровку масштабного коэффициента. Однако таблицы составляют путем предсказательного моделирования, которое не является удовлетворительным, поэтому могут существовать различия между записанными в памяти изменениями масштабного коэффициента и реальными изменениями масштабного коэффициента во время использования гиродатчика угловой скорости.
Объект изобретения
Задачей настоящего изобретения является осуществление калибровки масштабного коэффициента гиродатчика угловой скорости при помощи собственно гирометра.
Сущность изобретения
Для выполнения этой задачи изобретением предлагается способ калибровки масштабного коэффициента осесимметричного вибрационного гиродатчика угловой скорости, работающего при подаче сигнала управления амплитудой и сигнала управления прецессией на вибратор, совершающий колебания с заданной частотой, при этом способ содержит этап предварительной калибровки, на котором вычисляют контрольное отношение коэффициентов усиления между коэффициентом усиления возбуждения в первом направлении и коэффициентом усиления возбуждения во втором направлении, в квадратуре, согласующейся с первым направлением, и это контрольное отношение коэффициентов усиления вводят в память, и этап калибровки, на котором вычисляют значение измеряемой величины, связанной с масштабным коэффициентом, по соотношению пропорциональности, включающему контрольное отношение коэффициентов усиления, и вычисляют скорректированный масштабный коэффициент на основании значения измеряемой величины и сохраненного в памяти контрольного отношения коэффициентов усиления.
Действительно, было установлено, что поскольку коэффициент усиления возбуждения в каждом направлении изменяется в зависимости от температуры и изменяется во времени, то отношение коэффициентов усиления возбуждения в двух направлениях в согласующейся квадратуре можно рассматривать как постоянную величину при обычно требующейся степени точности. Поэтому на заводе можно осуществлять точное определение контрольного отношения коэффициентов усиления. В этом случае мгновенное измерение измеряемой величины позволяет производить точную калибровку масштабного коэффициента гиродатчика угловой скорости в момент его использования. Способ в соответствии с настоящим изобретением представляет особый интерес, если гиродатчик угловой скорости конфигурируют и применяют, как описано в документе FR-A-2851041 (или в его эквиваленте US 7919977), так как сигнал управления амплитудой и сигнал управления прецессией подают на одни и те же электроды таким образом, что отношение коэффициентов усиления возбуждения остается равным 1 независимо от температуры и/или истекшего времени.
Согласно первому варианту осуществления изобретения, измеряемой величиной является изменение частоты колебаний вибратора в зависимости от изменения сигнала управления жесткостью, подаваемого по меньшей мере на один управляющий электрод. Предпочтительно, сигнал управления жесткостью находится в одной временной квадратуре с сигналом управления амплитудой и сигналом управления прецессией, и сигнал управления жесткостью подается в квадратуре, геометрически согласующейся с сигналом управления прецессией. Таким образом, сигнал жесткости мало влияет на сигнал управления прецессией, поэтому его можно подавать непрерывно.
Согласно другому варианту осуществления способа в соответствии с настоящим изобретением, измеряемой величиной является изменение амплитуды колебаний вибратора в зависимости от изменения сигнала управления амплитудой.
Краткое описание чертежей
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания неограничительных частных вариантов изобретения со ссылками на прилагаемые чертежи, на которых:
фиг.1 - схематичный вид в разрезе полусферического резонатора, который можно использовать при осуществлении способа в соответствии с настоящим изобретением;
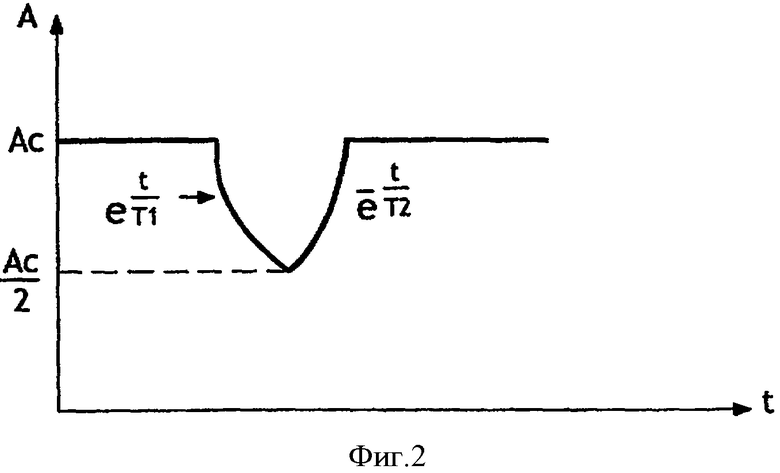
фиг.2 - схематичное изображение изменения амплитуды во время калибровки согласно второму варианту выполнения изобретения.
Подробное описание изобретения
Рассматривая фиг.1, можно сказать, что способ калибровки в соответствии с настоящим изобретением можно осуществлять с любым изотропным вибрационным гиродатчиком угловой скорости, содержащим осесимметричный резонатор с двумя степенями свободы, в частности резонатор, который, как известно, содержит полусферический вибратор 1, например колокол, выполненный из кремнезема и закрепленный стержнем 4 на основании 3. Внутреннюю поверхность колокола, а также его край и стержень 4 покрывают слоем 2 металла. На основании 3 установлены электроды 5, каждый из которых предназначен для выполнения функции управления или детектирования или каждый из которых может поочередно выполнять функцию управления или детектирования за счет уплотнения линий связи. Электроды расположены напротив края вибратора 1. Кроме того, резонатор содержит экранный электрод 6. Для применения в гиродатчике угловой скорости вибратор сначала приводят в колебательное движение путем подачи сигнала управления амплитудой СА, и полученные колебания ориентируют при помощи сигнала управления прецессией СР.
Согласно первому варианту осуществления изобретения, по меньшей мере, на один электрод дополнительно подают чередующийся сигнал управления жесткостью CR. Предпочтительно, этот сигнал управления жесткостью подают в одной временной квадратуре с сигналом управления амплитудой СА и с сигналом управления прецессией СР. Кроме того, сигнал управления жесткостью CR находится в квадратуре, геометрически согласующейся с сигналом управления прецессией CP, то есть в случае колебаний, поддерживаемых на резонансной частоте вибратора 1, сигнал управления жесткостью CR подают на управляющие электроды, расположенные под углом 90° по отношению к электродам управления, принимающим сигнал управления прецессией, тогда как, если вибратор возбуждают на двойной резонансной частоте, сигнал управления жесткостью CR подают на управляющие электроды, расположенные под углом 45° по отношению к электродам управления, принимающим сигнал управления прецессией.
Применяемая электроника позволяет регулировать сигналы управления, чтобы амплитуда колебаний соответствовала заданному значению Ас в первом направлении x, в то время как амплитуда колебаний является ничтожной во втором направлении y в квадратуре, согласующейся с первым направлением x. Сила по x соответствует сигналу СА управления амплитудой, а сила по y соответствует сигналу CP управления прецессией. Значение сигнала управления CP является мерой скорости Ω. В этом случае по направлениям x и y получают следующие уравнения движений:


где m - масса вибратора 1, f - ослабление колебаний, r - жесткость вибратора, Ω - измеряемая угловая скорость и Fy - сила по y.
Кроме того, в присутствии сигнала управления жесткостью частоту резонатора получают из уравнения:
где

На практике с учетом коэффициента усиления возбуждения Gmx в направлении x и коэффициента усиления детектора Gd для измерения амплитуды уравнение (4) становится:

откуда получают отношение V изменения частоты колебаний к изменению жесткости:
 .
.
Кроме того, при первом приближении содержащихся в нем тригонометрических значений x' может принимать вид x'=ω.Ac/Gd. Кроме того, введя коэффициент усиления возбуждения Gmy в направлении y, получаем: Fy=CP.Gmy. Таким образом, уравнение (2) принимает вид:

откуда получают масштабный коэффициент Gfe:

Взяв значение коэффициента усиления детектора Gd из уравнения (6) и перенеся его в уравнение (8), получаем:
где V является измеряемой величиной при изменении сигнала управления жесткостью и вычислении соответствующего изменения частоты колебаний.
Как было указано выше, отношение коэффициента усиления возбуждения по x к коэффициенту усиления возбуждения по y является постоянным, поэтому для идентичного заданного значения Ас при измерении на заводе и во время калибровки масштабного коэффициента отношение V/Gfe остается постоянным. На практике отношение Gmx/Gmy измеряют на заводе и вводят в память блока обработки резонатора. Если требуется осуществить калибровку масштабного коэффициента Gfe, то достаточно измерить мгновенное значение V и выбрать заданное значение амплитуды Ас, идентичное значению, использованному во время вычисления отношения коэффициентов усиления возбуждения, что позволяет вычислить скорректированный масштабный коэффициент Gfe при помощи уравнения (9).
Этот способ калибровки подходит для датчиков, в которых амплитуда сигнала управления жесткостью CR вызывает большие изменения частоты по сравнению с изменениями частоты, происходящими в результате изменения температуры резонатора. Этот вариант осуществления способа в соответствии с настоящим изобретением можно, таким образом, применять, в частности, для гиродатчиков угловой скорости типа «Квапазон».
Для гирометров, в которых изменение частоты является недостаточным во время изменений сигнала управления жесткостью, в частности, в случае полусферических резонирующих гиродатчиков угловой скорости применяют второй вариант осуществления способа в соответствии с настоящим изобретением, основанный на изменении сигнала управления амплитудой. Действительно, при нормальной работе электроника обработки конфигурирована для подержания амплитуды колебаний с постоянным заданным значением Ас. Когда сигнал управления амплитудой СА заменяют сигналом, пропорциональным амплитуде колебаний, амплитуда изменяется по нисходящей экспоненте с показателем t/T1, где Т1 - постоянная времени нисходящей экспоненты, показанной на фиг.2. Этот сигнал управления сохраняют, пока амплитуда не достигнет заранее определенного нижнего порога, то есть АС/2 в примере, показанном на фиг.2. Когда амплитуда достигает нижнего порога, знак сигнала управления амплитудой меняют на противоположный, и амплитуда изменяется по восходящей экспоненте с показателем - t/T2, где Т2 - постоянная времени этой второй экспоненты. Выражения для постоянных времени в механической системе даются в следующих уравнениях второго порядка:


Из этих двух уравнений получают коэффициент электромеханической эффективности:

После упрощения из уравнений (8) и (12) получаем соотношение:
Так же, как и в предыдущем случае, отношение C/Gfe напрямую зависит от постоянного отношения Gmx/Gmy.
Поскольку отношение Gmx/Gmy было измерено на заводе и введено в память блока обработки, если необходимо осуществить калибровку масштабного коэффициента, сигнал управления амплитудой заменяют сигналом, пропорциональным амплитуде колебаний. Снятые последовательные точки нисходящей экспоненты позволяют вычислить постоянную времени Т1 на основании моделей, хранящихся в памяти блока обработки. Когда амплитуда колебаний достигает нижнего порога, сигнал управления амплитудой меняют на противоположный по знаку и снимают последовательные точки изменения амплитуды для определения постоянной времени Т2 восходящей экспоненты. После этого можно вычислить коэффициент С электромеханической эффективности при помощи формулы (12). Затем значение С вводят в уравнение (13), из которого получают обновленное значение масштабного коэффициента.
Когда на управляющие электроды подают сигнал управления амплитудой с резонансной частотой вибратора, детектируемый сигнал соответствует приведенным выше уравнениям.
Когда сигнал управления амплитудой и сигнал управления прецессией подают с двукратной резонансной частотой вибратора, управляющие электроды генерируют электростатическое давление, выражение которого может быть приведено к единому члену, пропорциональному амплитуде, и это значит, что при подаче на управляющие электроды постоянного сигнала управления амплитудой СА коэффициент электромеханической эффективности соответствует выражению:
и соотношение C/Gfe можно упростить до уравнения:
Разумеется, настоящее изобретение не ограничивается описанными выше вариантами выполнения, и специалист может вносить свои варианты выполнения, не выходя за рамки изобретения, определенные формулой изобретения.
В частности, в предпочтительном втором варианте выполнения нижний порог амплитуды выбирают равным половине заданного значения амплитуды, что позволяет получить существенное изменение амплитуды при кратковременной калибровке, но, вместе с тем, можно использовать другой порог, в зависимости от требований, предъявляемых к работе гиродатчика угловой скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ОСЕСИММЕТРИЧНОГО ВИБРАЦИОННОГО ДАТЧИКА И ИНЕРЦИАЛЬНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2423669C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ПУТЕМ ПОВОРОТА ИНЕРЦИАЛЬНОГО УСТРОЙСТВА | 2010 |
|
RU2499225C1 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2018 |
|
RU2670245C1 |
| Микромеханический вибрационный кольцевой гироскоп | 2022 |
|
RU2800067C1 |
| СПОСОБ КАЛИБРОВКИ ВИБРАЦИОННОГО ГИРОСКОПА | 2015 |
|
RU2687101C2 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП КОМПЕНСАЦИОННОГО ТИПА | 2010 |
|
RU2471149C2 |
| ВИБРОДАТЧИК С ДВУМЯ КАНАЛАМИ, АКТИВИРУЕМЫМИ ПОСЛЕДОВАТЕЛЬНО | 2010 |
|
RU2491506C1 |
| ДАТЧИК С ПОДВИЖНЫМ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ, РАБОТАЮЩИМ В СМЕШАННОМ ВИБРИРУЮЩЕМ И МАЯТНИКОВОМ РЕЖИМЕ, И СПОСОБЫ УПРАВЛЕНИЯ ТАКИМ ДАТЧИКОМ | 2014 |
|
RU2632264C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП КОМПЕНСАЦИОННОГО ТИПА | 2010 |
|
RU2447402C1 |
| КАЛИБРОВКА ГИРОСКОПИЧЕСКИХ СИСТЕМ С ВИБРАЦИОННЫМИ ГИРОСКОПАМИ | 2009 |
|
RU2509981C2 |
Изобретение относится к способу калибровки масштабного коэффициента осесимметричного вибрационного гиродатчика угловой скорости, работающего при подаче сигнала (СА) управления амплитудой и сигнала (СР) управления прецессией на вибратор (1), совершающий колебания с заданной частотой. Способ включает этап предварительной калибровки, на котором вычисляют контрольное отношение коэффициентов усиления, которое вводят в память, между коэффициентом усиления возбуждения (Gmx) в первом направлении и коэффициентом усиления возбуждения (Gmy) во втором направлении, в квадратуре, согласующейся с первым направлением, и этап калибровки, на котором вычисляют значение измеряемой величины, связанной с масштабным коэффициентом, по соотношению пропорциональности, включающему контрольное отношение коэффициентов усиления. Вычисляют скорректированный масштабный коэффициент на основании значения измеряемой величины и сохраненного в памяти контрольного отношения коэффициентов усиления. Изобретение позволяет повысить точность масштабного коэффициента. 5 з.п. ф-лы, 2 ил.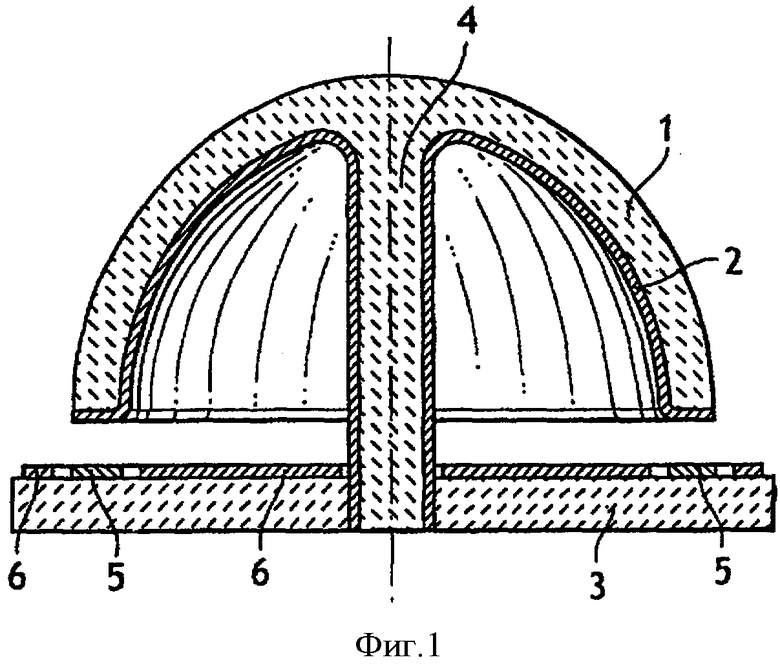
1. Способ калибровки масштабного коэффициента осесимметричного вибрационного гиродатчика угловой скорости, работающего при подаче сигнала (СА) управления амплитудой и сигнала (СР) управления прецессией на вибратор, совершающий колебания с данной частотой, отличающийся тем, что содержит этап предварительной калибровки, на котором вычисляют контрольное отношение коэффициентов усиления между коэффициентом усиления возбуждения (Gmx) в первом направлении и коэффициентом усиления возбуждения (Gmy) во втором направлении, в квадратуре, согласующейся с первым направлением, причем контрольное соотношение коэффициентов усиления вводят в память, и этап калибровки, на котором вычисляют значение измеряемой величины, связанной с масштабным коэффициентом, по соотношению пропорциональности, включающему контрольное отношение коэффициентов усиления, и вычисляют скорректированный масштабный коэффициент на основании значения измеряемой величины и сохраненного в памяти контрольного отношения коэффициентов усиления.
2. Способ калибровки по п.1, отличающийся тем, что измеряемой величиной является изменение частоты колебаний в зависимости от изменения сигнала управления жесткостью, подаваемого по меньшей мере на один управляющий электрод.
3. Способ калибровки по п.2, отличающийся тем, что сигнал управления жесткостью подают в одной временной квадратуре с сигналом управления амплитудой и сигналом управления прецессией, и сигнал управления жесткостью подают в геометрически согласующейся квадратуре с сигналом управления прецессией.
4. Способ калибровки по п.1, отличающийся тем, что измеряемой величиной является изменение амплитуды в зависимости от изменения сигнала (СА) управления амплитудой.
5. Способ калибровки по п.4, отличающийся тем, что сигнал (СА) управления амплитудой генерируют для изменения амплитуды от заданной амплитуды (Ас) до нижнего порога амплитуды, после чего следует обратное изменение, начиная от нижнего порога амплитуды до заданной амплитуды (Ас).
6. Способ калибровки по п.5, отличающийся тем, что нижний порог амплитуды равен половине заданной амплитуды.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ КАЛИБРОВКИ ГИРОИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИОННОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2092402C1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| US 5712427 A, 27.01.1998 | |||
| DE 4000559 A1, 22.08.1996 | |||
| СПОСОБ КАЛИБРОВКИ АКСЕЛЕРОМЕТРОВ | 2002 |
|
RU2249793C2 |

