Область техники, к которой относится изобретение
Настоящее изобретение относится к оперативному кардиологическому устройству и способу введения катетера, который регистрирует электрофизиологические сигналы.
Уровень техники
Все больше и больше электрофизиологических (EP) процедур проводится на кардиологических рентгеновских установках. Для данных процедур требуется много времени с обычной продолжительностью в несколько часов и большая доза рентгеновских лучей для пациентов, проходящих данные процедуры. Следовательно, важно обеспечить функциональные возможности рентгеновской установки, которые облегчают использование данной установки, сокращают время выполнения процедуры и уменьшают дозу рентгеновских лучей.
Одним частным примером электрофизиологической (EP) процедуры является минимально инвазивное лечение тахикардии, т.е. аномально быстрых ритмов сердца. Многочисленные волокна пронизывают сердечные мышцы, которые отвечают за распространение электрофизиологических сигналов. Наличие ткани, способной вызвать аритмию, или аномальных путей, шунтирующих нормальные проводящие волокна, может вызвать тахикардию. Во время минимально инвазивного лечения местонахождение ткани, способной вызвать аритмию, или аномальных путей определяется посредством отображения электрофизиологических сигналов возбуждения. Например, задержка сигнала возбуждения относительно контрольного сигнала в данное положение или нерегулярные источники возбуждения отображаются для одной или более полостей сердца. После отображения сигналов катетер для деструкции направляется в опознанные целевые положения, и переменный ток, криотерапия или другие средства используются для локального разрушения сердечной ткани, которая вызывает тахикардию. Характерным для данной процедуры является то, что рентгеноскопия используется для обеспечения (приблизительных) пространственных положений катетера относительно анатомии сердца, в то время как электрофизиологические сигналы обеспечивают фактические диагностические данные.
В различных точках во время такого введения необходимо направлять катетер в положение с характеристическим заранее полученным электрофизиологическим сигналом. С этой целью электрофизиологические сигналы могут записываться вместе с имеющими отношение последовательностями рентгеноскопии, и в последующей точке заранее может быть выбрана комбинированная последовательность электрофизиологического-рентгеновского исследования, восстановлена и отображена (подтверждено, например, US 6572556 B2). Перемещение катетера в местоположение с заданным электрофизиологическим сигналом, однако, остается довольно трудной и продолжительной процедурой.
Раскрытие изобретения
Исходя из данной ситуации целью настоящего изобретения было создание средств для облегченного направления катетера, который регистрирует электрофизиологические сигналы во время введения.
Данная цель достигается при помощи оперативного устройства по п.1 и способа по п.11. Предпочтительные варианты осуществления раскрыты в зависимых пунктах формулы изобретения.
В соответствии с его первым аспектом, настоящее изобретение включает в себя оперативное устройство для введения в сердечно-сосудистую систему, содержащее следующие компоненты:
Катетер, оснащенный, по меньшей мере, одним электродом, который может регистрировать электрофизиологические сигналы из ткани (например, сердечной мышцы). Если катетер содержит более одного электрода (подобный так называемому «корзиночному катетеру»), тогда множество сигналов будет зарегистрировано во множестве положений, но, тем не менее, обеспечивается фиксированное отображение положений для зарегистрированных сигналов ЭКГ.
Электрографическое устройство, которое соединено с указанным электродом катетера и которое приспособлено для измерения электрофизиологических потенциалов, зарегистрированных указанным электродом. Электрографические устройства данного типа хорошо известны в известном уровне техники (например, для электрокардиографии, электромиографии или электроэнцефалографии) и, следовательно, не будут описаны здесь более подробно. Посредством контроля зарегистрированных электрофизиологических потенциалов можно диагностировать ткань в местоположении электрода.
Формирователь изображения для формирования изображений области, в которой происходит вмешательство (называемой в дальнейшем «областью вмешательства»). Формирователем изображения может, например, быть рентгеновское устройство, магнитно-резонансный формирователь изображения (MRI) или ультразвуковое устройство. На изображениях, формируемых при помощи данного устройства, катетер будет виден таким образом, что его можно перемещать через все полости сердца с помощью данных изображений.
Устройство для обработки данных, которое может, например, быть реализовано при помощи микрокомпьютера с соответствующими компонентами, подобными центральному процессору (CPU), памяти (ОЗУ, ПЗУ, жесткий диск и т.д.), интерфейсам ввода-вывода и соответствующим программным обеспечением. Устройство для обработки данных соединяется с электрографическим устройством и формирователем изображения для приема сигналов с этих компонентов и, по выбору, также для управления ими. Кроме того, оно приспособлено для выполнения следующих этапов:
а) Хранение последовательности изображений катетера в области вмешательства, которые были сформированы формирователем изображения, причем каждое изображение хранится вместе с имеющей отношение обычно синхронной электрографической записью (которая записывается посредством описания во время формирования изображения). Записи отображают электрофизиологические условия в местоположении, в котором электрод катетера находится на соответствующем изображении или последовательности изображений.
b) Формирование изображения катетера в области вмешательства. Во время введения указанное изображение является обычно (рентгеновским) прямым изображением и, следовательно, в дальнейшем будет называться «фактическим изображением». Однако это не следует понимать как ограничение относительно времени, в течение которого формируется указанное изображение. Кроме того, электрографические потенциалы по выбору могут записываться параллельно формированию фактического изображения подобно процедуре этапа a).
c) Выбор «контрольного изображения» из хранящейся последовательности этапа a), в которой указанное контрольное изображение будет принадлежать заданному электрографическому образцу (записи). Заданное электрографическое изображение обычно заранее устанавливается врачом и обычно показывает ткань с нарушением функции.
d) Локализация местоположения катетера на контрольном изображении, в котором «положение» состоит из одной или более точек (например, определение криволинейной траектории), и в котором указанная локализация может быть достигнута при помощи любого подходящего способа, известного из цифровой обработки изображений. Кроме того, «целевое положение» для катетера определяется на фактическом изображении, на котором указанное целевое положение соответствует локализованному положению катетера на контрольном изображении. Другими словами, локализованное положение катетера на контрольном изображении регистрируется при помощи соответствующего положения на фактическом изображении. Предпочтительно, указанная регистрация основана на фиксированных опознавательных точках изображенной части тела, т.е. анатомические положения на контрольном изображении отображаются на идентичных анатомических положениях на фактическом изображении.
Оперативное устройство указанного типа является очень полезным для перемещения катетера во время электрофизиологических процедур, поскольку определение целевого положения на прямом изображении помогает направлять катетер в требуемую ткань, показывая характеристическое электрографическое изображение. Больше не нужно находить указанную ткань во время продолжительной повторяющейся процедуры продвижения катетера поэтапно во время сравнения записанных электрографических сигналов с заданными сигналами. Таким образом, продолжительность введения может быть уменьшена, что означает меньше стресса и рентгеновского облучения для пациента, а также сокращение медицинского персонала.
Определение целевого положения в этапе d) может быть достигнуто при помощи разных способов, известных из цифровой обработки изображений. Контрольное изображение и фактическое изображение могут, например, регистрироваться на основании их содержания, например, посредством нахождения суперпозиции изображений при максимизированном локальном сходстве. В соответствии с предпочтительным вариантом осуществления определение основано на локализации, по меньшей мере, одной характеристической точки части тела, показанной на контрольном изображении и фактическом изображении. Характеристической точкой может, например, быть анатомическая опознавательная точка, подобная верхушке сердца, или отмеченные координаты в предсердиях подобно легочным венам.
В другом варианте осуществления оперативное устройство содержит контрольный измерительный прибор, в котором местоположение данного прибора известно для каждого изображения хранящейся последовательности и для фактического изображения относительно других изображений. Таким образом, контрольный измерительный прибор может рассматриваться в качестве маркера, который обеспечивает объектно-ориентированную регистрацию изображений последовательности и фактического изображения. Контрольный измерительный прибор, в частности, может быть вторым или «контрольным» катетером. Контрольный катетер с контрольным электродом обычно необходим в электрофизиологических измерениях и обычно находится в том же самом анатомическом положении во время вмешательства. Если контрольный катетер смещается во время вмешательства, то это не препятствует его использованию в качестве маркера на изображениях, если степень указанного смещения известна, чтобы ее можно учитывать.
Оперативное устройство, предпочтительно, также содержит устройство отображения, например, монитор, для отображения фактического изображения вместе с указанием определенного целевого положения. Таким образом, врач может направлять катетер в целевое положение при непосредственном визуальном контроле.
Локализация катетера (или его электрода) и/или контрольного измерительного прибора (если имеются) на контрольном изображении может быть облегчена, если она опознана на одном изображении из изображений последовательности и, затем, отслежена на других изображениях последовательности. Таким образом, локализация на любом изображении может быть основана на уже известных местонахождениях на предыдущем/последующем изображении (относительно временного порядка последовательности изображений). Опознавание катетера или контрольного измерительного прибора на первом изображении может быть достигнуто в интерактивном режиме с помощью пользователя. Участие человека, особенно, является полезным для отличия (оперативного) катетера от контрольного катетера, поскольку они оба могут выглядеть одинаковыми или очень похожими друг на друга на изображениях. В этом случае, опознавание, выполняемое пользователем, может быть распространено на все изображения посредством указанного отслеживания.
В дальнейшей разработке исследовательского устройства выбирается контрольное изображение, которое соответствует той же самой фазе сердца, как и фактическое изображение (конечно, при одновременной принадлежности к заданному электрофизиологическому изображению). Фаза сердца, которая соответствует изображению, может быть легко определена, поскольку электрографические сигналы записываются параллельно формированию изображений. Посредством выбора изображения с подобной фазой сердца в качестве фактического изображения, смещения и/или деформации области вмешательства, вызванные биением сердца, могут быть уменьшены до минимума.
Устройство может дополнительно быть приспособлено для компенсации влияния, которое дыхательное движение оказывает на катетер и/или на контрольный измерительный прибор в последовательности изображений и в фактическом изображении. Дыхательное движение может, в частности, компенсироваться на основании заранее полученной величины перемещения между положениями катетера в результате дыхания и непрерывного определения глубины дыхания на основании полученных изображений или наружных датчиков дыхания.
Для достижения оптимальной точности, указанные способы, предпочтительно, объединены. Таким образом, устройство может отображать положение (контрольного) катетера после компенсации биения сердца и дыхательного движения, в котором движение биения сердца компенсируется за счет непрерывного обновления выбора контрольного изображения таким образом, что оно соответствует фазе сердца фактического изображения, которое опознается при помощи одновременно полученной ЭКГ. Компенсация обоих видов движения является, в частности, важной для точного перемещения и повторного позиционирования катетера в заранее заданное положение.
В другом варианте настоящего изобретения катетер и/или контрольный измерительный прибор предусмотрены с маркерами, которые обеспечивают их пространственное местоположение. Указанные маркеры могут, например, быть плотными материалами для рентгеновского луча, которые легко могут быть обнаружены на рентгеновских изображениях. Предпочтительно, маркеры принадлежат к устройству локализация вне линии прямой видимости, например, как датчики Холла, которые измеряют величину и направление неоднородного внешнего магнитного поля. Соответствующие маркеры таких устройств известны в известном уровне техники и, следовательно, не будут подробно здесь описаны. Настоящее изобретение дополнительно включает способ направления катетера, оснащенного электродом, в область вмешательства во время введения в сердечно-сосудистую систему, включающий следующие этапы:
a) формирования и хранения последовательности изображений катетера в области вмешательства вместе с имеющими отношение электрографическими записями;
b) формирования фактического изображения катетера в области вмешательства;
c) выбора контрольного изображения из хранящейся последовательности изображений, которая принадлежит заданной электрографической записи;
d) определения местоположения катетера на контрольном изображении и определения соответствующего целевого положения на фактическом изображении.
В общем виде способ включает формирование этапов, которые могут осуществляться при помощи исследовательского устройства указанного типа. Следовательно, ссылка сделана на предыдущее описание для большей информации по элементам, преимуществам и усовершенствованиям данного способа.
В соответствии с предпочтительным вариантом осуществления способ включает контрольный измерительный прибор, в частности, контрольный катетер, который размещается в области, в которой соответствующее положение указанного прибора известно во всех изображениях. Следовательно, это положение может быть использовано в качестве отметки для регистрации контрольного изображения и фактического изображения.
Эти и другие аспекты настоящего изобретения будут понятны и объяснены со ссылкой на вариант (варианты) осуществления, описанный (описанные) ниже.
Краткое описание чертежей
Далее настоящее изобретение описано в виде примера с помощью сопроводительного чертежа, который схематически изображает оперативное устройство в соответствии с настоящим изобретением.
Осуществление изобретения
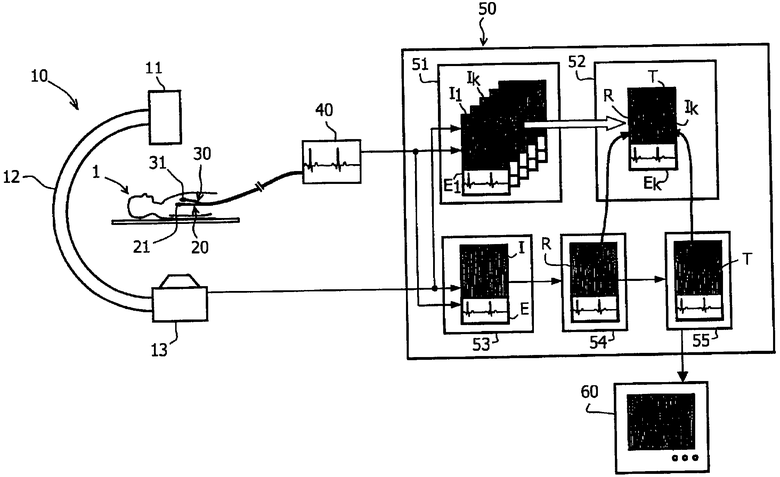
На левой стороне чертежа изображено вращающееся рентгеновское устройство 10, которое состоит из рентгеновской трубки 13 и рентгеновского детектора 11, которые соединены при помощи С-образного плеча 12. Рентгеновское устройство 10 обеспечивает формирование рентгеновских проекций из различных направлений пациента, лежащего на столе в центре устройства. Вместо рентгеновского устройства также могут быть использованы другие формирователи изображений.
Кроме того, на чертеже изображен катетер 20, который перемещается через сосудистую систему пациента 1 в сердце. Электрод 21 на конце катетера соединен с электрографическим устройством 40 для записи электрофизиологических потенциалов ткани, контактирующей с электродом 21. Для электрофизиологических измерений второй или «контрольный» катетер 30 показан и соединен также с электрографическим устройством 40, где указанный катетер 30 и его контрольный электрод 31 обычно находятся в неизменном анатомическом положении во время введения. Обычным использованием устройства является минимально инвазивное лечение тахикардии, вызванной тканью, способной вызвать аритмию, или аномальными путями в сердце пациента 1. Во время такого вмешательства электрод 21 катетера 20 должен быть введен в одно и то же анатомическое положение несколько раз, в котором правильное позиционирование диагностируется записанным электрофизиологическим потенциалом. Изображенное устройство, в частности, приспособлено для помощи врачу при данном позиционировании катетера 20, как будет описано более подробно ниже.
Рентгеновское устройство 10 и электрографическое устройство 40 соединены с устройством 50 для обработки данных, например, рабочей станцией. Чертеж иллюстрирует разные модули указанного устройства 50 для обработки данных, которые, в основном, используются в соответствии с программным обеспечением.
В первом модуле 51 последовательность изображений I1, … Ik, …, сформированных рентгеновским устройством 10, хранится вместе с электрографическими записями E1, … Ek, … с электрода 21, которые были записаны в то время, когда были сформированы изображения. Необходимо отметить, что электрографические записи E1, … Ek, … обычно продолжаются несколько секунд или даже минут, в то время как формирование рентгеновских изображений выполняется гораздо быстрее. Электрографические записи отображают электрофизиологические сигналы, генерируемые тканью в положении электрода 21 катетера 20 в сформированном изображении.
Во втором модуле 53 фактическое или прямое (рентгеновское) изображение I области вмешательства сохраняется вместе с соответствующей электрофизиологической записью E, измеренной электродами 21, 31 устройства 40. Указанное фактическое изображение I отображает данное положение катетера 20 во время введения.
Как было уже упомянуто выше, обычной задачей во время электрофизиологической процедуры является переориентация катетера 20 (или, более точно, его электрода 21) в заранее выбранное положение, которое характеризуется конкретным изображением электрографического сигнала. Для выполнения данной задачи электрографическая запись Ek, подобная данному заданному изображению, отыскивается в модуле 51, и соответствующее изображение Ik последовательности изображений выбирается и передается в модуль 52 в качестве так называемого «контрольного изображения» Ik.
На контрольном изображении Ik изображение или «целевое положение» T катетера 20 и изображение или «контрольное положение» R контрольного катетера 30 могут быть определены с помощью процедур, известных в цифровой обработке изображений.
В подобном этапе положение R' контрольного катетера 30 может быть определено на фактическом изображении I в модуле 54. Когда контрольный катетер 30 имеет фиксированное положение в сердце и не перемещается относительно сердца, он отмечает то же самое анатомическое положение (или связный путь положений), как в контрольном изображении Ik, так и фактическом изображении I. Это обеспечивает согласование изображений катетера 30 (например, использование регистрации, основанной на уровне излучения, или геометрическое согласование обнаруженных и секционированных катетеров) и, таким образом, регистрацию обоих изображений I и Ik, т.е. взаимно-однозначное отображение соответствующих (анатомических) точек обоих изображений друг на друге. На основании данной регистрации целевое положение T, заранее локализованное в контрольном изображении Ik, может быть перенесено в соответствующее целевое положение T' в фактическом изображении I, как изображено символически в модуле 55.
В качестве последнего этапа фактическое изображение I может быть отображено на мониторе 60 вместе с указанием (например, с помощью цветного изображения и/или стрелки, указывающей на конец катетера) целевого положения T, в которое катетер 20 должен быть перемещен.
Опознавание контрольного катетера 30 и (оперативного) катетера 20 в изображениях может быть выполнено вручную посредством указания точки на соответствующих катетерах в контрольном изображении Ik. В качестве альтернативы, контрольный и оперативный катетеры могут быть указаны один раз в рентгеновском изображении в самом начале процедуры, и соответствующие данные могут быть переданы в последовательные кадры посредством отслеживания катетеров. Исходные данные о положении контрольного катетера или маркеров, идентифицируемых машинным зрением (например, благодаря их количеству и/или взаимному расстоянию), также могут быть использованы для данного опознавания.
Слежение за катетером также может помочь, если контрольный катетер переместился бы в некоторую точку заранее во время введения. В этом случае оперативный катетер 20 может быть использован в качестве ориентира для оценки перемещения контрольного катетера 30. Затем соответствующие данные могут быть приняты во внимание в пределах совмещения. Дополнительные продления процедуры включают использование данных ЭКГ для выбора изображений последовательности I1, … Ik, … и фактической рентгеновской последовательности с соответствующей фазой сокращения сердечной мышцы, так что направление перемещения представлено с компенсацией движения иногда сильного биения сердца. Подобным образом, анализ циклического дыхательного движения может быть принят во внимание для повышения точности. Глубина дыхания может быть определена на основании полученных изображений с использованием цифровой обработки изображений или с помощью наружных датчиков, например, ремня с датчиками натяжения вокруг живота или нижней грудной клетки. Это обеспечивает отдельное определение движения катетеров в результате дыхания и биения сердца. Кроме того, данные о положении, полученные от локализаторов вне линии прямой видимости, прикрепленных к соответствующим катетерам, могут быть использованы в пределах согласования и последующего совмещения, например, для добавления данных о глубине или для замены алгоритмов машинного зрения непосредственными измерениями положений.
Описанное устройство облегчает восстановление положения катетера, соответствующего конкретному электрофизиологическому сигналу во время электрофизиологических процедур. Поскольку врач лучше обеспечен, конкретное введение может выполняться быстрее при меньшем воздействии рентгеновского облучения на пациента и персонала.
В конечном счете, указано, что в настоящей заявке термин «включающий» не исключает других элементов или этапов, который не исключает множество, и что один процессор или другое устройство может выполнять функции нескольких устройств. Настоящее изобретение включает каждый элемент новизны и каждое сочетание отличительных особенностей. Кроме того, ссылочные обозначения в пунктах формулы изобретения не должны истолковываться как ограничивающие их объем.
Группа изобретений относится к области медицины. Устройство содержит: катетер, оснащенный электродом; электрографическое устройство, которое соединено с электродом катетера для измерения электрофизиологических потенциалов; формирователь изображений для формирования изображений области вмешательства; устройство для обработки данных, которое соединено с формирователем изображений и электрографическим устройством. Устройство выполнено с возможностью выполнения следующих этапов способа: а) формирование и сохранение последовательности изображений (I1,… Ik,…) катетера в области вмешательства вместе с соответствующими электрографическими записями (E1,… Ek,…) в соответствующих положениях электрода катетера; b) формирование фактического изображения (I) катетера в области вмешательства; с) выбор контрольного изображения (Ik) из сохраненной последовательности изображений (I1,… Ik,…), которая принадлежит заданной электрографической записи (Ek); d) определение положения (Т) катетера на контрольном изображении (Ik) и определение соответствующего целевого положения (Т') на фактическом изображении (I). Применение данной группы изобретений обеспечит быстрый ввод катетера в положение, соответствующее конкретному физиологическому сигналу во время электрофизиологических процедур, при меньшем воздействии рентгеновского облучения на пациента и персонал. 2 н. и 10 з.п.ф-лы, 1 ил.
1. Оперативное устройство для введения в сердечно-сосудистую систему, содержащее: катетер (20), оснащенный электродом (21); электрографическое устройство (40), которое соединено с электродом (21) катетера (20) для измерения электрофизиологических потенциалов; формирователь (10) изображений для формирования изображений области вмешательства;
устройство (50) для обработки данных, которое соединено с формирователем (10) изображений и электрографическим устройством (40) и которое выполнено с возможностью выполнения следующих этапов: а) хранения последовательности изображений (I1,… Ik,…) катетера (20), находящегося в области вмешательства вместе с соответствующими электрографическими записями (E1,… Ek,…) в соответствующих положениях электрода (21) катетера (20); b) получения фактического изображения (I) катетера (20) в области вмешательства; с) выбора контрольного изображения (Ik) из хранящейся последовательности изображений (I1,… Ik,…), которая принадлежит заданной электрографической записи (Ek); d) определения местонахождения (Т) катетера (20) на контрольном изображении (Ik) и определения соответствующего целевого положения (Т') на фактическом изображении (I).
2. Устройство по п.1, отличающееся тем, что устройство для обработки данных выполнено с возможностью выполнения определения на этапе d) на основе локализации, по меньшей мере, одной характеристической точки (R, R') изображенного объекта в контрольном изображении (Ik) и фактическом изображении (I).
3. Устройство по п.1, отличающееся тем, что оно содержит контрольный измерительный прибор, в частности контрольный катетер (30), соответствующее положение которого известно для всех изображений хранящейся последовательности (I1,… Ik,…) и для фактического изображения (I).
4. Устройство по п.1, отличающееся тем, что оно содержит отображающее устройство (60) для отображения фактического изображения (I) вместе с указанием определенного целевого положения (Т').
5. Устройство по п.1, отличающееся тем, что формирователем (10) изображений является рентгеновское устройство (10).
6. Устройство по п.3, отличающееся тем, что катетер (20) и/или контрольный измерительный прибор (30) опознаются на одном из изображений (I1,… Ik,…) последовательности и затем отслеживаются в других изображениях.
7. Устройство по п.1, отличающееся тем, что контрольное изображение (Ik) выбирается таким образом, что оно соответствует фазе сердца фактического изображения (I).
8. Устройство по п.3, отличающееся тем, что оно выполнено с возможностью компенсации влияния дыхательного движения на катетер (20) и/или контрольный измерительный прибор (30) в последовательности изображений (I1,… Ik,…) и фактическом изображении (I).
9. Устройство по п.8, отличающееся тем, что оно содержит датчик дыхания.
10. Устройство по п.3, отличающееся тем, что катетер (20) и/или контрольный измерительный прибор (30) оснащены маркерами, которые обеспечивают определение их пространственного положения.
11. Способ направления катетера (20), оснащенного электродом (21), в области вмешательства, включающий следующие этапы, на которых: а) формируют и сохраняют последовательность изображений (I1,… Ik,…) катетера (20) в области вмешательства вместе с соответствующими электрографическими записями (E1,… Ek,…) в соответствующих положениях электрода (21) катетера (20); b) формируют фактическое изображение (I) катетера (20) в области вмешательства; с) выбирают контрольное изображение (Ik) из сохраненной последовательности изображений (I1,… Ik,…), которая принадлежит заданной электрографической записи (Ek); d) определяют положение (Т) катетера (20) на контрольном изображении (Ik) и определяют соответствующее целевое положение (Т') на фактическом изображении (I).
12. Способ по п.11, отличающийся тем, что в области вмешательства располагают контрольный измерительный прибор, в частности контрольный катетер (30), и определяют соответствующее положение указанного прибора (30) на всех изображениях из сохраненной последовательности изображений (I1,… Ik,…) и на фактическом изображении (I).
| СПОСОБ БИОПСИИ ТКАНЕЙ СЕРДЦА | 2000 |
|
RU2173091C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ВЕНОЗНОЙ ГИПЕРТЕНЗИИ ГОЛОВНОГО МОЗГА ПРИ ОПЕРАЦИЯХ НА "СУХОМ" СЕРДЦЕ ИЗ ЛЕВОСТОРОННЕГО ДОСТУПА В УСЛОВИЯХ БЕСПЕРФУЗИОННОЙ ГИПОТЕРМИЧЕСКОЙ ЗАЩИТЫ | 1993 |
|
RU2092109C1 |
| US 6473635 B1, 29.10.2002 | |||
| US 5577502 A, 26.11.1996. | |||

