Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству регулирования нагрузки подушки для регулирования нагрузки подушки штампа и прессовой машине, содержащей устройство регулирования нагрузки подушки.
Уровень техники
В прессовой машине, например, когда вал кривошипа приводится двигателем для вращения, вал кривошипа работает так, чтобы преобразовывать вращательное движение в движение вверх-вниз, тем самым перемещая вверх и вниз ползун, соединенный с валом кривошипа.
При опускании ползуна прессование прессовой машины выполняется посредством размещения заготовки между верхней частью штампа, закрепленной на нижней поверхности ползуна, и нижней частью штампа, расположенной под ползуном.
Механизм подушки расположен под ползуном для восприятия нагрузки опустившегося ползуна (т.е. верхней части штампа) во время прессования.
На фиг.1 показан механизм подушки. Механизм подушки прикреплен к станине 28 в качестве нижнего конструктивного элемента прессовой машины и включает в себя подштамповую плиту 45, имеющую верхнюю поверхность, на которой закреплена нижняя часть штампа, прижим 46 для заготовки, который расположен в нижней части штампа 43, множество штифтов 47 подушки, которые поддерживают прижим 46 для заготовки с нижней стороны, плиту 49 для штифтов, которая поддерживает штифты 47 подушки снизу, и подкладку 14 подушки, которая поддерживает плиту 49 для штифтов с нижней стороны.
Механизм подушки дополнительно включает в себя гидравлический цилиндр 2 и пневматический цилиндр 53 для восприятия прессовой нагрузки, действующей на подкладку 14 подушки.
Подушка штампа образована прижимом 46 для заготовок, штифтами 47 подушки, плитой 49 для штифтов, подкладкой 14 подушки и гидравлическим цилиндром 2.
Когда ползун 54 опущен так, что верхняя часть штампа 56 входит в контакт с прижимом 46 для заготовок во время прессования, плита 49 для штифтов опускается и подкладка 14 подушки, находящаяся в контакте с плитой 49 для штифтов, соответственно опускается.
В это время нагрузка пресса, прикладываемая от верхней части штампа 56 к подкладке 14 подушки, поддерживается гидравлическим цилиндром 2 и пневматическим цилиндром 53, расположенными в нижней части подкладки 14 подушки.
Установленное значение давления гидравлического цилиндра 2 устанавливают заранее относительно угла вращения вала кривошипа, с тем чтобы получать подходящую производительность подушки. Например, установленное значение давления устанавливают постоянным.
Прессовая машина дополнительно включает в себя устройство регулирования нагрузки подушки. Как показано на фиг.1, устройство регулирования нагрузки подушки включает в себя гидравлический цилиндр 2, сервоклапан 4, которой соединен с гидравлическим цилиндром 2, гидравлический бак 6, который соединен с гидравлическим цилиндром 2 посредством сервоклапана 4, датчик 12 давления, который определяет гидравлическое давление гидравлического цилиндра 2, и регулирующий степень открытия блок 11, который сравнивает установленное значение давления с определяемым значением давления, полученным датчиком 12 давления, и регулирует степень открытия сервоклапана 4 так, что гидравлическое давление гидравлического цилиндра 2 становится установленным значением давления.
Однако, когда регулировка с обратной связью выполняется регулирующим степень открытия блоком 11, скорость опускания ползуна 54 изменяется в соответствии с углом вращения вала кривошипа, тем самым, ухудшая характеристику регулирования. В частности, поскольку скорость опускания ползуна 54 уменьшается в положении около НМТ (нижней мертвой точки), давление гидравлического цилиндра 2 становится в значительной степени меньше установленного значения давления.
По этой причине в патентном документе 1 выполняется следующая регулировка.
Устройство регулирования нагрузки подушки, раскрытое в патентном документе 1, определяет скорость опускания ползуна и выполняет корректирование регулирования, с тем чтобы работа сервоклапана была направлена к его закрывающему положению, когда скорость опускания ползуна становится меньше, по мере того, как ползун приближается к НМТ. Поэтому гидравлическое давление гидравлического цилиндра регулируется, чтобы быть ближе к установленному значению давления.
[Патентный документ 1]
Японская выложенная патентная публикация №H04 (1992)-172199 «Устройство регулирования давления подушки штампа с ЧПУ»
Однако хотя устройство регулирования нагрузки подушки, раскрытое в патентном документе 1, корректирует степень открытия сервоклапана в соответствии со скоростью опускания ползуна, если регулирование, описанное в патентном документе 1, выполняется, когда установленная нагрузка подушки штампа изменяется в зависимости от различия в типе заготовки как объекта прессования, гидравлическое давление гидравлического цилиндра отклоняется от установленного значения давления. В результате возникает проблема, заключающаяся в том, что фактическая нагрузка, которая действует на подушку штампа, отклоняется от установленного значения нагрузки.
Сущность изобретения
Поэтому первая задача изобретения заключается в создании устройства регулирования нагрузки подушки, способного автоматически предотвращать отклонение фактической нагрузки, действующей на подушку штампа, от установленного значения нагрузки, даже когда установленное значение нагрузки подушки штампа изменяется в зависимости от различия в типе заготовки как объекта прессования.
Кроме этого, второй задачей изобретения является создание прессовой машины с устройством регулирования нагрузки подушки, способным автоматически предотвращать отклонение фактической нагрузки, действующей на подушку штампа, от установленного значения, даже когда установленное значение нагрузки подушки штампа изменяется.
Согласно изобретению для достижения первой задачи для прессовой машины предусмотрено устройство регулирования нагрузки подушки для регулирования прессовой нагрузки, действующей на подушку штампа, расположенную под ползуном, выполненным с возможностью перемещения вверх и вниз, причем устройство регулирования нагрузки подушки включает в себя: гидравлический цилиндр, образующий подушку штампа; гидравлический регулирующий клапан, выполненный с возможностью соединения с гидравлическим цилиндром; гидравлический источник, выполненный с возможностью соединения с гидравлическим цилиндром посредством гидравлического регулирующего клапана; регулирующий степень открытия блок, выполненный с возможностью выдачи сигнала управления для регулирования степени открытия гидравлического регулирующего клапана на основании установленного значения давления гидравлического цилиндра; блок определения скорости, выполненный с возможностью определения скорости опускания подушки штампа; и блок корректировки сигнала, выполненный с возможностью корректировки значения сигнала управления в соответствии с установленным значением давления и значением скорости опускания, определенным блоком определения скорости; при этом степень открытия гидравлического регулирующего клапана регулируется на основании сигнала управления, скорректированного блоком корректировки сигнала.
С описанной конфигурацией, поскольку блок корректировки сигнала корректирует сигнал, учитывая не только скорость опускания подушки штампа, но также установленное значение давления гидравлического цилиндра, возможно автоматическое предотвращение отклонения гидравлического давления гидравлического цилиндра от установленного значения давления, даже когда установленная нагрузка подушки штампа (т.е. установленное значение давления гидравлического цилиндра) сильно изменяется.
Согласно предпочтительному варианту осуществления изобретения блок корректировки сигнала выполнен с возможностью корректирования значения сигнала управления так, что степень открытия гидравлического регулирующего клапана больше при увеличении установленного значения давления.
Гидравлическое давление гидравлического цилиндра, в общем, имеет тенденцию становиться меньше, чем установленное значение давления в положении около НМТ, по мере того как установленное значение давления становится больше, и становиться больше, чем установленное значение давления в положении около НМТ, по мере того, как установленное значение давления становится меньше.
Тем не менее в этом варианте осуществления возможно подавлять тенденцию, поскольку значение сигнала управления корректируется так, что степень открытия гидравлического регулирующего клапана уменьшается тем больше, чем больше становится установленное значение давления.
Согласно другому предпочтительному варианту осуществления изобретения блок корректировки сигнала выполнен с возможностью корректирования значения сигнала управления так, что степень открытия гидравлического регулирующего клапана больше уменьшается при уменьшении скорости опускания подушки штампа.
Гидравлическое давление гидравлического цилиндра имеет общую тенденцию такую, что гидравлическое давление уменьшается больше, чем установленное значение давления, по мере того как скорость опускания подушки штампа становится медленней.
Тем не менее в этом варианте осуществления, поскольку значение сигнала управления корректируется так, что степень открытия гидравлического регулирующего клапана уменьшается, когда скорость опускания подушки штампа становится медленней, возможно корректировать изменение установленного значения давления и изменение скорости опускания подушки штампа.
Согласно изобретению для достижения второй задачи предложена прессовая машина, содержащая: двигатель; элемент вращения, приводимый во вращение двигателем; механизм преобразования, выполненный с возможностью преобразования вращательного движения элемента вращения в возвратно-поступательное движение; ползун, выполненный с возможностью соединения с механизмом преобразования для совершения возвратно-поступательного перемещения; и устройство регулирования нагрузки подушки, выполненное с возможностью регулирования прессовой нагрузки, действующей на подушку штампа, расположенную под ползуном, при этом устройство регулирования нагрузки подушки содержит гидравлический цилиндр, образующий подушку штампа; гидравлический регулирующий клапан, выполненный с возможностью соединения с гидравлическим цилиндром; гидравлический источник, выполненный с возможностью соединения с гидравлическим цилиндром посредством гидравлического регулирующего клапана; регулирующий степень открытия блок, выполненный с возможностью выдачи сигнала управления для регулирования степени открытия гидравлического регулирующего клапана на основании установленного значения давления гидравлического цилиндра; блок определения скорости, выполненный с возможностью определения скорости опускания подушки штампа; и блок корректировки сигнала, выполненный с возможностью корректировки значения сигнала управления в соответствии с установленным значением давления и значением скорости опускания, определенным блоком определения скорости, причем степень открытия гидравлического регулирующего клапана регулируется на основании сигнала управления, скорректированного блоком корректировки сигнала.
В прессовой машине с описанной конфигурацией, поскольку блок корректирования сигнала корректирует сигнал управления, принимая во внимание не только скорость опускания подушки штампа, но также установленное значение давления гидравлического цилиндра, возможно автоматическое предотвращение отклонения гидравлического давления гидравлического цилиндра от установленного значения давления, даже когда установленная нагрузка подушки штампа (т.е. установленное значение давления гидравлического цилиндра) сильно изменяется.
Согласно изобретению для достижения первой задачи предложено устройство регулирования нагрузки подушки для прессовой машины, которое регулирует прессовую нагрузку, действующую на подушку штампа, расположенную под ползуном, выполненным с возможностью перемещения вверх и вниз, причем устройство регулировки нагрузки подушки содержит: серводвигатель, блок передачи энергии, выполненный с возможностью преобразования вращательного движения серводвигателя в движение вверх-вниз для перемещения вверх и вниз подушки штампа; блок регулирования положения, выполненный с возможностью выдачи сигнала управления для регулирования высоты подушки штампа на основании установленного значения нагрузки подушки штампа; блок определения скорости, выполненный с возможностью определения скорости опускания подушки штампа; и блок корректировки сигнала, выполненный с возможностью корректирования значения сигнала управления в ответ на установленное значение нагрузки и значение скорости опускания, определенное блоком определения скорости, при этом высота подушки штампа регулируется на основании сигнала управления, скорректированного блоком корректировки сигнала.
С вышеизложенной конфигурацией, поскольку сигнал управления корректируется на основании установленного значения нагрузки и скорости опускания подушки штампа, возможно автоматическое предотвращение отклонение фактической нагрузки, действующей на подушку штампа, от установленного значения нагрузки в соответствии с изменением установленного значения нагрузки и скорости опускания подушки штампа.
Как описано выше, согласно изобретению, возможно автоматически предотвращать отклонение гидравлического давления от установленного значения давления, когда установленная нагрузка подушки штампа изменяется.
Краткое описание чертежей
Фиг.1 представляет собой схематичный вид, иллюстрирующий общую конструкцию устройства регулирования нагрузки и механизм подушки прессовой машины согласно уровню техники.
Фиг.2 представляет собой схематичный вид, иллюстрирующий конструкцию устройства регулирования нагрузки подушки согласно первому варианту осуществления изобретения.
Фиг.3A представляет собой график, иллюстрирующий значение фактического гидравлического давления и установленное значение давления, когда гидравлическая регулировка выполняется на основании изменения скорости опускания подкладки подушки.
Фиг.3B представляет собой другой график, иллюстрирующий значение фактического гидравлического давления и установленное значение давления, когда гидравлическая регулировка выполняется на основании изменения скорости опускания подкладки подушки.
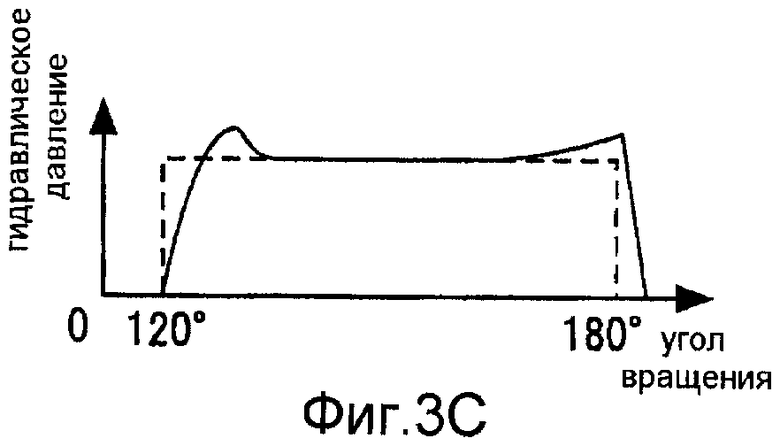
Фиг.3C представляет собой другой график, иллюстрирующий значение фактического гидравлического давления и установленное значение давления, когда гидравлическая регулировка выполняется на основании изменения скорости опускания подкладки подушки.
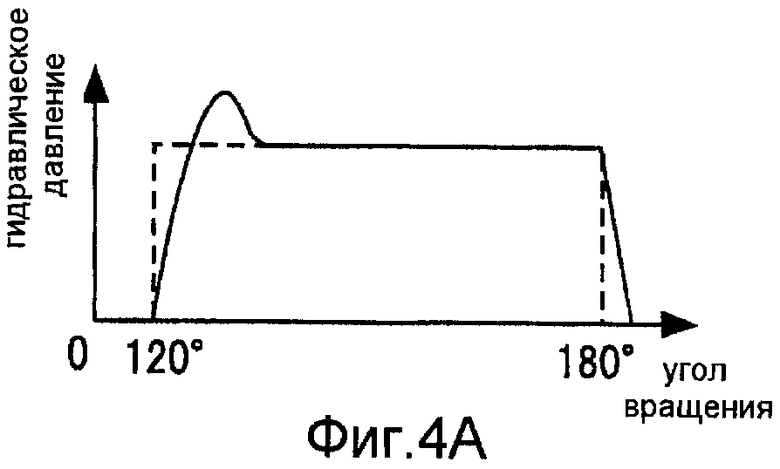
Фиг.4A представляет собой график, иллюстрирующий значение фактического гидравлического давления и установленное значение давления, когда гидравлическая регулировка выполняется на основании изменения установленного значения давления и скорости опускания подкладки подушки.
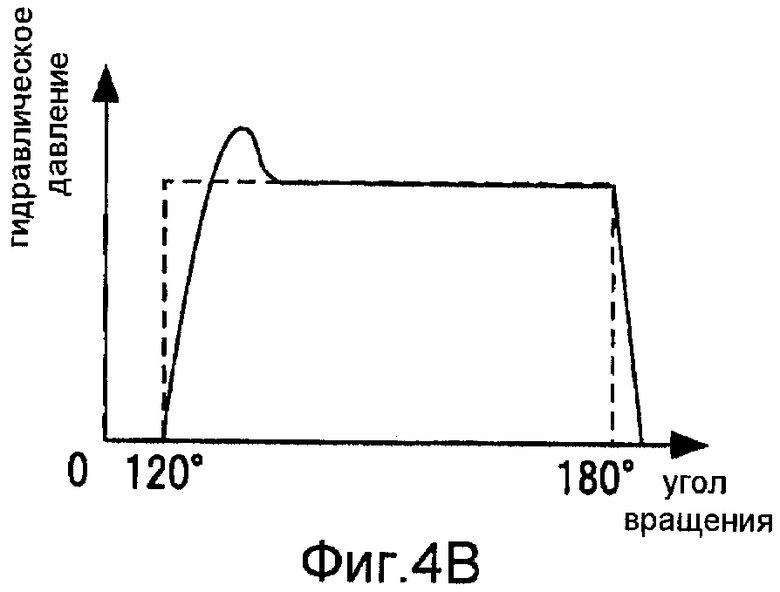
Фиг.4B представляет собой график, иллюстрирующий значение фактического гидравлического давления и установленное значение давления, когда гидравлическая регулировка выполняется на основании изменения установленного значения давления и скорости опускания подкладки подушки.
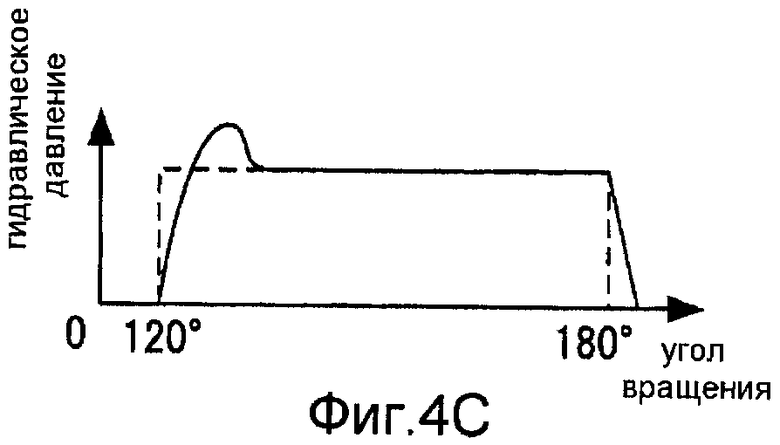
Фиг.4C представляет собой график, иллюстрирующий значение фактического гидравлического давления и установленное значение давления, когда гидравлическая регулировка выполняется на основании изменения установленного значения давления и скорости опускания подкладки подушки.
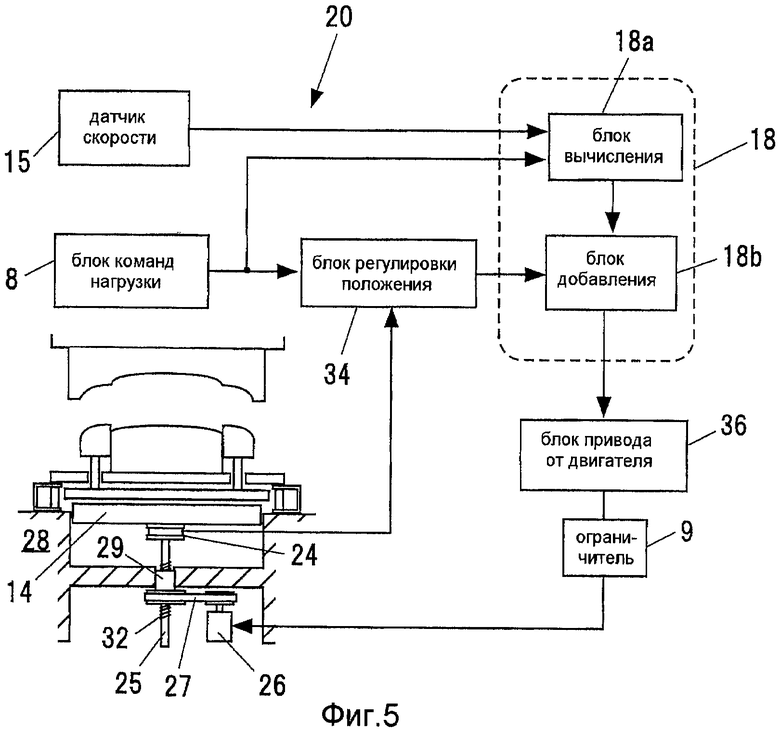
Фиг.5 представляет собой схематичный вид, иллюстрирующий конструкцию устройства регулирования нагрузки подушки согласно второму варианту осуществления изобретения.
Описание предпочтительного варианта осуществления изобретения
Далее подробно со ссылкой на прилагаемые чертежи будут описаны предпочтительные варианты осуществления изобретения. Кроме этого, на соответствующих чертежах одинаковые ссылочные позиции обозначают одинаковые элементы и их повторное описание будет опущено.
[Первый вариант осуществления]
Прессовая машина включает в себя двигатель, вал кривошипа в качестве элемента вращения, приводимого во вращение двигателем для преобразования вращательного движения в возвратно-поступательное, ползун, соединенный с валом кривошипа для перемещения вверх и вниз, верхний штамп, которая закреплен на нижней поверхности ползуна, и механизм подушки, который расположен под ползуном, и к которому прикладывается нагрузка от верхнего штампа, когда ползун опускается. Кроме этого, вал кривошипа как элемент вращения и механические элементы, соединенные с валом кривошипа, образуют механизм преобразования, который преобразует вращательное движение элемента вращения в возвратно-поступательное перемещение ползуна, но механизм преобразования может быть соответствующим образом выполнен в виде, например, кулачка или подобного.
Поскольку механизм подушки имеет такую же конструкцию, как конструкция, показанная на фиг.1, описание будет опущено. В таком механизме подушки нагрузка пресса, которая прикладывается от ползуна (т.е. верхнего штампа) к подкладке 14 подушки во время прессования, устанавливается значением гидравлического давления гидравлического цилиндра 2.
Прессовая машина снабжена устройством регулирования нагрузки подушки, которое выполняет регулирование для поддерживания значения гидравлического давления гидравлического цилиндра 2 на установленном значении давления во время прессования.
На фиг.2 показана конструкция устройства 10 регулирования нагрузки подушки согласно первому варианту осуществления. Как показано на фиг.2, устройство 10 регулирования нагрузки подушки включает в себя гидравлический цилиндр 2, сервоклапан 4, соединенный с гидравлическим цилиндром 2, гидравлический бак 6, соединенный с гидравлическим цилиндром 2 посредством сервоклапана 4, блок 8 команд нагрузки, выполненный с возможностью выдачи установленного значения давления гидравлического цилиндра 2 в соответствии с вводом условий прессования, например, оператором, и регулирующий степень открытия блок 11, выполненный с возможностью выдачи сигнала управления для регулирования степени открытия сервоклапана 4 на основании установленного значения давления, которое вводится блоком 8 команд нагрузки.
Кроме того, гидравлический регулирующий клапан выполнен в виде сервоклапана 4, но может быть выполнен в виде других подходящих элементов. Гидравлический источник выполнен в виде гидравлического бака 6, но может быть выполнен в виде других подходящих элементов.
Регулирующий степень открытия блок 11 выдает сигнал управления для поддержания значения гидравлического давления гидравлического цилиндра 2 на установленном значении давления на основании разницы, получаемой при сравнении установленного значения давления, которое выдается блоком 8 команд нагрузки, и определенного значения гидравлического давления, которое выдается датчиком 12 давления (PT) в качестве датчика измерения значения гидравлического давления гидравлического цилиндра 2.
Сигнал управления вводится в сервоклапан 4 посредством описанного ниже блока 18 корректировки сигнала и ограничителя 9. Сервоклапан 4 регулирует степень открытия на основании входного сигнала управления. Например, сигнал управления может быть сигналом напряжения, и степень открытия сервоклапана пропорциональна значению напряжения.
Кроме этого, поскольку нагрузка пресса прикладывается от ползуна к гидравлическому цилиндру 2 во время прессования, то значение гидравлического давления гидравлического цилиндра больше гидравлического давления гидравлического бака 6. При прессовании, при котором поршень гидравлического цилиндра 2 опускается, степень открытия сервоклапана 4 регулируется для регулирования величины потока из гидравлического цилиндра 2 к гидравлическому баку 6, тем самым поддерживая значение гидравлического давления гидравлического цилиндра 2 на установленном значении давления.
Согласно этому варианту осуществления устройство 10 регулирования нагрузки давления включает в себя датчик 15 скорости, который определяет скорость опускания подушки штампа.
Датчик 15 скорости может быть выполнен в виде, например, элемента или блока для измерения скорости опускания подушки штампа на основании определенного значения, полученного датчиком скорости для измерения скорости или датчиком хода для измерения хода подкладки 14 подушки или ползуна. В качестве альтернативы датчик 15 скорости может быть выполнен в виде элемента для вычисления скорости опускания подушки штампа на основании определения значения угла поворота вала кривошипа, полученного преобразователем угол-код, и заданного отношения между углами поворота вала кривошипа и скоростями опускания подкладки 14 подушки.
Кроме того, блок определения скорости для измерения скорости опускания подушки штампа выполнен в виде датчика 15 скорости, но может быть выполнен в виде других подходящих элементов.
Далее будет описан случай, в котором скорость опускания подушки штампа определяют на основании скорости подкладки 14 подушки.
Устройство 10 регулирования нагрузки подушки дополнительно содержит блок 18 корректировки сигнала, который корректирует значение сигнала управления, выдаваемого регулирующим степень открытия блоком 11, в соответствии с установленным значением давления, выдаваемым блоком 8 команд нагрузки, и скоростью опускания подкладки 14 подушки, определенной датчиком 15 скорости.
Как показано на фиг.2, блок 18 корректировки сигнала включает в себя блок 18a вычисления и блок 18b добавления. Блок 18a вычисления вычисляет значение корректировки на основании установленного значения давления, выдаваемого блоком 8 команд нагрузки, и значения определения скорости подкладки 14 подушки, определенного датчиком 15 скорости.
Блок 18b добавления выдает скорректированный сигнал управления, добавляя значение корректировки, выводимое блоком 18a вычисления, к значению сигнала управления, выдаваемому регулирующим степень открытия блоком 11.
Сначала, для сравнения, будет описан случай, в котором блок 18 корректировки сигнала корректирует сигнал управления на основании значения определения скорости среди установленного значения давления и значения определения скорости подкладки 14 подушки, определенного датчиком 15 скорости. Затем будет описан другой случай, в котором сигнал управления корректируется на основании как значения определения скорости, так и установленного значения давления.
Блок 18 корректировки сигнала корректирует значение сигнала управления так, что степень открытия сервоклапана 4 уменьшается по мере того, как скорость опускания подкладки 14 подушки уменьшается. В этом случае значение корректировки может быть установлено так, что значение корректировки сигнала управления пропорционально скорости опускания подкладки 14 подушки.
На графиках фиг.3A-3C ордината указывает значение гидравлического давления гидравлического цилиндра 2, а абсцисса указывает угол вращения вала кривошипа. Угол вращения вала кривошипа указывает фактический угол вращения вала кривошипа. Ползун совершает возвратно-поступательное движение один раз между ВМТ (верхней мертвой точкой) и НМТ (нижней мертвой точкой) во время одного полного вращения вала кривошипа. На фиг.3A-3C угол вращения вала кривошипа, когда ползун расположен в ВМТ, устанавливается равным 0 градусов, угол вращения вала кривошипа увеличивается по мере того, как ползун приближается к НМТ, и, когда ползун прибывает в НМТ, угол вращения вала кривошипа устанавливается равным 180 градусам. Угол вращения вала кривошипа далее увеличивается по мере того, как ползун подходит близко к ВМТ после прохождения через НМТ, и, когда ползун прибывает в ВМТ, угол вращения вала кривошипа устанавливается равным 360 градусам, что является такой же вращательной позицией, что при 0 градусов. Кроме того, на фиг.3A-3C пунктирная линия указывает установленное значение давления, которое выводится блоком 8 команд нагрузки, а сплошная линия указывает значение фактического гидравлического давления гидравлического цилиндра 2, когда сигнал управления скорректирован на основании скорости опускания подкладки 14 подушки. В примере, показанном на фиг.3A-3C, когда угол вращения вала кривошипа находится на 120 градусах, подкладка 14 подушки начинает опускаться, и, когда угол вращения вала кривошипа находится на 180 градусах, ползун расположен в НМТ, тем самым позволяя поршню гидравлического цилиндра 2 находиться в его наиболее сдавленном состоянии.
Когда PR обозначает номинальное падение давления сервоклапана 4, PT обозначает значение давления гидравлического бака 6 и PC обозначает установленное значение давления гидравлического цилиндра 2, фиг.3A указывает случай, где PR=PC-PT, фиг.3B указывает случай, где PR<<PC-PT, и фиг.3C указывает случай, где PR>>PC-PT.
Как будет понятно из указания по фиг.3A-3C, в случае, где PR=PC-PT, значение фактического гидравлического давления тождественно установленному значению давления для времени запуска пресса. Однако в случае, где PR<<PC-PT вследствие увеличения установленного значения давления, величина превышения, на которое значение фактического гидравлического давления проходит после установленного значения давления, становится больше во время запуска пресса, и значение фактического давления становится меньше, чем установленное значение давления, в положении около НМТ.
Кроме того, в случае, где PR>>PC-PT, величина превышения, на которое значение фактического гидравлического давления проходит после установленного значения давления становится меньше при времени запуска пресса, но значение фактического гидравлического давление становится больше, чем установленное значение давления, в положении около НМТ.
Таким образом, когда выполнена корректировка сигнала управления на основании скорости опускания подкладки 14 подушки, в случае, где PR=PC-PT, значение фактического гидравлического давления тождественно установленному значению давления, кроме начального момента прессования. Однако когда установленное значение давления в значительной степени отклонено от PC=PT+PR, значение фактического давления проходит далеко от установленного значения давления.
По этой причине, согласно этому варианту осуществления блок 18 корректировки сигнала корректирует сигнал управления на основании установленного значения давления гидравлического цилиндра 2, а также скорости опускания подкладки 14 подушки.
Ниже будет описан случай, при котором сигнал управления корректируется на основании установленного значения давления и скорости опускания подкладки 14 подушки.
Как показано на фиг.2, блок 18a вычисления вычисляет значение корректировки сигнала управления на основании установленного значения давления, которое выдается блоком 8 команд нагрузки, а также скорости опускания подкладки 14 подушки, которая выдается датчиком 15 скорости.
Блок 18 корректировки сигнала корректирует сигнал управления так, что степень открытия сервоклапана 4 уменьшается все больше по мере того, как установленное значение давления увеличивается.
Когда значение сигнала управления скорректировано таким образом, получают результат, показанный на фиг.4A-4C. Фиг.4A показывает случай, где PR=PC-PT, фиг.4B показывает случай, где PR<<PC-PT, и фиг.4C показывает случай, где PR>>PC-PT.
Как четко видно из фиг.4A-4C, значение фактического гидравлического давления тождественно установленному значению давления, кроме начального момента прессования.
Такое значение корректировки может быть пропорционально, например, формуле 1, приведенной ниже.
[Формула 1]

В формуле 1, PR, PC и PT являются теми же, что описанные выше, а V обозначает скорость опускания подкладки 14 подушки.
Кроме того, в этом примере, скорость V соответствует скорости опускания подкладки 14 подушки от момента, когда подкладка 14 подушки начинает опускаться, до момента, когда подкладка 14 подушки прибывает в НМТ, и становится равной 0, когда подкладка 14 подушки прибывает в НМТ. После НМТ скорость V поддерживается равной 0.
Таким образом, значение корректировки увеличивается, как показано в формуле 1, по мере того, как скорость V опускания становится быстрее.
Как понятно из формулы 1, значение корректировки пропорционально также формуле 2.
[Формула 2]
Таким образом, как показано в формуле 2, возможно выполнять регулировку в соответствии с проектированным опорным значением сервоклапана 4, поскольку значение корректировки устанавливается так, чтобы сокращаться по мере того, как установленное значение давления увеличивается, учитывая номинальное падение давления PR сервоклапана 4 и давление PT гидравлического бака 6.
Кроме того, в случае, где гидравлический цилиндр 2 соединен с гидравлическим баком 6 посредством множества сервоклапанов 4, размещенных параллельно, и степени открывания этих сервоклапанов 4 регулируются синхронизированным образом, желательно учитывать количество сервоклапанов 4.
Желательно учитывать рабочую площадь гидравлического цилиндра 2 или номинальную величину потока сервоклапана 4.
Формула 3 указывает значение корректировки, принимая во внимание такие факторы.
[Формула 3]

В формуле 3 n обозначает количество сервоклапанов 4, A обозначает рабочую площадь нижней камеры гидравлического цилиндра, а QR обозначает номинальную величину потока сервоклапана 4.
Исходя из значения корректировки, указанной в формуле 3, возможно регулировать степень открытия, учитывая количество n сервоклапанов 4, рабочую площадь A гидравлического цилиндра 2 и номинальную величину QR потока сервоклапана 4.
[Второй вариант осуществления]
На фиг.5 показана конструкция устройства 20 регулирования нагрузки подушки согласно второму варианту осуществления изобретения. Механизм подушки второго варианта осуществления снабжен серводвигателем 26 вместо гидравлического цилиндра 2, показанного на фиг.2. Серводвигатель 26 перемещает вверх и вниз подкладку 14 подушки для регулирования нагрузки, которая действует на подкладку 14 подушки. Далее будут описаны блоки, отличающиеся от первого варианта осуществления. Другие блоки могут быть такими же или подобны блокам, описанным в первом варианте осуществления.
Устройство 20 регулирования нагрузки подушки согласно второму варианту осуществления включает в себя датчик 24 нагрузки в качестве блока измерения нагрузки, который закреплен на нижней поверхности подкладки 14 подушки для определения нагрузки, действующей на подкладку 14 подушки во время прессования, стержень 25, который соединен с нижней частью датчика 24 нагрузки и приводится в действие для перемещения вверх и вниз, и перемещения вверх и вниз подкладки 14 подушки, и серводвигатель 16, который приводит в действие шариковую гайку 29, подлежащую вращению посредством приводного ремня 27.
Шариковую гайку 29 устанавливают, например, на станине 29 прессовой машины таким образом, чтобы вращалась, но не перемещалась в вертикальном направлении. Шариковый винт 32 выполнен в стержне 25 для винтового зацепления с внутренней резьбой шариковой гайки 29. Таким образом, когда шариковая гайка 29 приводится в действие для вращения, стержень 25 перемещается вверх и вниз. Кроме того, средство (блок) передачи энергии образовано приводным ремнем 27 и шариковой гайкой 29, но может быть выполнено в виде других подходящих элементов.
Устройство 20 регулирования нагрузки подушки включает в себя блок 8 команд нагрузки, который выводит установленное значение нагрузки, и блок 34 регулирования положения, который выдает сигнал управления для вращения серводвигателя 26 на основании установленного значения нагрузки, которое вводится блоком 8 команд нагрузки.
Блок 34 регулирования положения сравнивает установленное значение нагрузки со значением определения нагрузки, определенным датчиком 24 нагрузки, и выполняет регулировку так, что нагрузка, действующая на подкладку 14 подушки, становится заданным значением нагрузки (установленным значением нагрузки) на основании результата сравнения.
Таким же образом, как в первом варианте осуществления, устройство 20 регулирования нагрузки подушки дополнительно включает в себя датчик 15 скорости, который определяет скорость опускания подкладки 14 подушки.
Кроме того, устройство 20 регулирования нагрузки подушки дополнительно включает в себя блок 18a вычисления, который вычисляет значение корректировки сигнала управления на основании установленного значения нагрузки, которое выдается блоком 8 команд нагрузки, и значения скорости опускания, определенного датчиком 15 скорости.
Затем блок 18b добавления устройства 20 регулирования нагрузки подушки корректирует сигнал управления, добавляя значение корректировки, которое вводится блоком 18a вычисления, к значению сигнала управления, которое вводится блоком 34 регулирования положения.
Блок 36 привода от двигателя получает скорректированный сигнал управления и обеспечивает прохождение тока к серводвигателю 26 через ограничитель 9 в течение заданного времени для приведения серводвигателя 26 во вращение на угол вращения в соответствии со скорректированным сигналом управления.
Таким образом, поскольку сигнал управления корректируется на основании установленного значения нагрузки и скорости опускания подкладки 14 подушки, возможно ограничивать отклонение фактической нагрузки, действующей на подкладку 14 подушки, от установленного значения нагрузки в соответствии с изменением установленного значения нагрузки и скорости опускания подкладки 14 подушки.
[Другие варианты осуществления]
Изобретение не ограничивается предпочтительными вариантами осуществления, но может быть, несомненно, изменено различным образом в пределах объема и не отступая от сущности изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СЕКТОРНЫМ ПРИЖИМОМ ШТАМПА ДЛЯ ЛИСТОВОЙ ШТАМПОВКИ | 2019 |
|
RU2723857C1 |
| Гидропневматическая подушка | 1975 |
|
SU590150A1 |
| СПОСОБ ЛИСТОВОЙ ШТАМПОВКИ И ДИФФЕРЕНЦИРОВАННОЕ ПРИЖИМНОЕ УСТРОЙСТВО ШТАМПА ЛИСТОВОЙ ШТАМПОВКИ | 2017 |
|
RU2685624C2 |
| ПОДУШКА ПНЕВМАТИЧЕСКАЯ С ГИДРАВЛИЧЕСКИМ УДЕРЖИВАТЕЛЕМ | 1993 |
|
RU2074092C1 |
| МНОГОКРИВОШИПНЫЙ ПРЕСС С ГИДРОПРЕДОХРАНИТЕЛЕМ | 1996 |
|
RU2121438C1 |
| МЕХАНИЧЕСКИЙ ПРЕСС ДЛЯ ОПРОБОВАНИЯ И ОТЛАДКИ ШТАМПОВ | 1999 |
|
RU2169078C2 |
| ПРИВОД ПОЛЗУНА МЕХАНИЧЕСКОГО ПРЕССА | 2005 |
|
RU2283233C1 |
| ПОДУШКА ПНЕВМАТИЧЕСКАЯ С ГИДРАВЛИЧЕСКИМ УДЕРЖИВАТЕЛЕМ | 1993 |
|
RU2080264C1 |
| ГИДРАВЛИЧЕСКИЙ КОВОЧНЫЙ ПРЕСС И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ПРЕССОМ | 2015 |
|
RU2683992C2 |
| Установка для регулирования положения сооружений | 1991 |
|
SU1795000A1 |
Изобретения относятся к обработке давлением и могут быть использованы в прессовых машинах для регулирования нагрузки пресса, действующей на подушку штампа. Подушка расположена под ползуном пресса. Устройство регулирования содержит гидравлический цилиндр, образующий подушку штампа, соединенный с ним гидравлический регулирующий клапан, гидравлический источник, регулирующий степень открытия блок, блок определения скорости опускания подушки штампа, блок корректировки сигнала. Гидравлический источник соединен с цилиндром посредством гидравлического регулирующего клапана. Регулирующий степень открытия блок выдает сигнал управления для регулирования степени открытия упомянутого клапана на основании установленного значения давления цилиндра. Блок корректировки сигнала обеспечивает корректирование значения сигнала управления в соответствии с установленным значением давления цилиндра и значением скорости опускания подушки штампа. В результате обеспечивается возможность автоматического предотвращения отклонения фактической нагрузки, действующей на подушку, от установленного значения, даже в случае его изменения при прессовании заготовок разного типа. 3 н. и 2 з.п. ф-лы, 9 ил.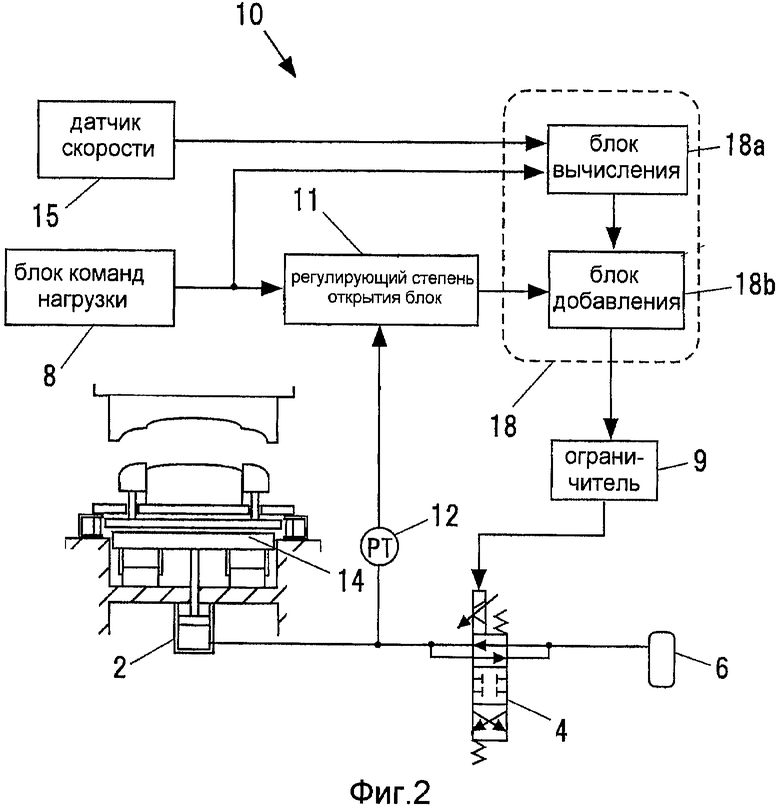
1. Устройство регулирования нагрузки подушки прессовой машины для регулирования нагрузки пресса, действующей на подушку штампа, расположенную под ползуном, выполненным с возможностью перемещения вверх и вниз, содержащее гидравлический цилиндр, образующий подушку штампа, гидравлический регулирующий клапан, выполненный с возможностью соединения с гидравлическим цилиндром, гидравлический источник, выполненный с возможностью соединения с гидравлическим цилиндром посредством гидравлического регулирующего клапана, регулирующий степень открытия блок, выполненный с возможностью выдачи сигнала управления для регулирования степени открытия гидравлического регулирующего клапана на основании установленного значения давления гидравлического цилиндра, блок определения скорости, выполненный с возможностью определения скорости опускания подушки штампа, и блок корректировки сигнала, выполненный с возможностью корректирования значения сигнала управления в соответствии с установленным значением давления гидравлического цилиндра и значением скорости опускания подушки штампа, определенной блоком определения скорости, при этом степень открытия гидравлического регулирующего клапана регулируется на основании сигнала управления, скорректированного блоком корректировки сигнала.
2. Устройство по п.1, в котором блок корректировки сигнала выполнен с возможностью корректирования значения сигнала управления таким образом, что степень открытия гидравлического регулирующего клапана уменьшается при увеличении установленного значения давления гидравлического цилиндра.
3. Устройство по п.1 или 2, в котором блок корректировки сигнала выполнен с возможностью корректирования значения сигнала управления таким образом, что степень открытия гидравлического регулирующего клапана уменьшается при уменьшении скорости опускания подушки штампа.
4. Прессовая машина, содержащая двигатель, механизм преобразования, включающий в себя элемент вращения, приводимый двигателем для совершения вращательного движения, и выполненный с возможностью преобразования вращательного движения в возвратно-поступательное движение, ползун, выполненный с возможностью соединения с механизмом преобразования для совершения возвратно-поступательного перемещения, и устройство регулирования нагрузки подушки, выполненное с возможностью регулирования нагрузки пресса, действующей на подушку штампа, расположенную под ползуном, при этом устройство регулирования нагрузки подушки содержит гидравлический цилиндр, образующий подушку штампа, гидравлический регулирующий клапан, выполненный с возможностью соединения с гидравлическим цилиндром, гидравлический источник, соединенный с гидравлическим цилиндром посредством гидравлического регулирующего клапана, регулирующий степень открытия блок, выполненный с возможностью выдачи сигнала управления для регулирования степени открытия гидравлического регулирующего клапана на основании установленного значения давления гидравлического цилиндра, блок определения скорости, выполненный с возможностью определения скорости опускания подушки штампа, и блок корректировки сигнала, выполненный с возможностью корректировки значения сигнала управления в соответствии с установленным значением давления гидравлического цилиндра и значением скорости опускания подушки штампа, определенным блоком определения скорости, причем степень открытия гидравлического регулирующего клапана регулируется на основании сигнала управления, скорректированного блоком корректировки сигнала.
5. Устройство регулирования нагрузки подушки прессовой машины для регулирования нагрузки пресса, действующей на подушку штампа, расположенную под ползуном, выполненным с возможностью перемещения вверх и вниз, содержащее серводвигатель, блок передачи энергии, выполненный с возможностью преобразования вращательного движения серводвигателя в движение вверх и вниз для перемещения вверх и вниз подушки штампа, блок регулирования положения, выполненный с возможностью выдачи сигнала управления для регулирования высоты подушки штампа на основании установленного значения нагрузки подушки штампа, блок определения скорости, выполненный с возможностью определения скорости опускания подушки штампа, и блок корректировки сигнала, выполненный с возможностью корректировки значения сигнала управления в соответствии с установленным значением нагрузки подушки штампа и значением скорости ее опускания, определенным блоком определения скорости, при этом высота подушки штампа регулируется на основании сигнала управления, скорректированного блоком корректировки сигнала.
| JP 4172199 А, 19.06.1992 | |||
| Нагрузочный клапан к гидропневматической подушке пресса | 1974 |
|
SU497171A1 |
| Подушка гидропневматическая | 1975 |
|
SU555027A2 |
| Нагрузочный клапан гидропневматической подушки пресса | 1980 |
|
SU887265A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

