Область техники, к которой относится изобретение
Настоящее изобретение относится к способу возбуждения электромагнитного силового привода вибрационного типа, предпочтительно применимого к электробритве и предназначенного для сообщения подвижному телу возвратно-поступательного движения.
Предшествующий уровень техники
Схема возбуждения для электромагнитного силового привода вибрационного типа известна в данной области техники как схема возбуждения, которая возбуждает резонансную систему, выполненную с возможностью преобразования или сохранения энергии посредством использования упругости упругого тела и инерции подвижного тела, обладающего массой. Электромагнитный силовой привод вибрационного типа включает в себя статор с обмоткой, подвижное тело с постоянным магнитом и участок каркаса для возвратно-поступательного поддержания подвижного тела посредством пружины, причем статор прикреплен к участку каркаса. Схема возбуждения для этого электромагнитного силового привода вибрационного типа сообщает возвратно-поступательное движение подвижному телу посредством бездатчикового управления с обратной связью временем приложения переменного напряжения, которое прикладывается к обмотке. При этом сигнал, указывающий положение, в котором направление движения подвижного тела изменяется на обратное (и именуемый далее «опорным сигналом фазы»), т.е. сигнал, указывающий момент времени, когда индуцированное электродвижущее напряжение, создаваемое в обмотке, становится почти нулевым, и сигнал, указывающий скорость подвижного тела (и именуемый далее «сигналом скорости»), т.е. индуцированное электродвижущее напряжение, имеющееся после истечения заданного времени с момента обнаружения опорного сигнала фазы, используются в качестве управляющих сигналов (см., например, выложенные публикации №№ 7-265560 и 7-313149 патентов Японии).
Вследствие попыток уменьшить количество деталей и сократить затраты, необходимые при установке датчика, обычная схема возбуждения реализует бездатчиковое управление с обратной связью, при котором индуцируемое электродвижущее напряжение используется как один из управляющих сигналов. Вместе с тем, невозможно точно обнаружить индуцируемое электродвижущее напряжение в течение времени, когда намагничивающий ток или свободный ток остается в обмотке. Поэтому существует потребность в обеспечении периода отсутствия намагничивания, в пределах которого следует обнаруживать индуцируемое электродвижущее напряжение. Период отсутствия намагничивания можно обеспечить путем прогнозирования момента времени, в который опорный сигнал фазы появляется, с последующим прекращением намагничивания в заданный момент времени, не оказывая при этом влияния на опорный сигнал фазы. При обнаружении сигнала скорости в течение этого периода отсутствия намагничивания требуются достаточно увеличенное напряжение и довольно высокая скорость обработки центрального процессора (ЦП), чтобы обнаружить малейшее изменение в индуцируемом электродвижущем напряжении, имеющемся после истечения заданного времени с момента обнаружения опорного сигнала фазы. Это затрудняет рентабельную разработку схемы возбуждения.
Краткое изложение сущности изобретения
Ввиду вышеизложенного, настоящее изобретение обеспечивает способ возбуждения электромагнитного силового привода, который делает возможной рентабельную разработку схемы возбуждения.
В соответствии с аспектом настоящего изобретения, обеспечен способ возбуждения электромагнитного силового привода для возбуждения электромагнитного силового привода, включающего в себя статор и подвижное тело, причем статор включает в себя сердечник, снабженный множеством магнитных полюсов, и обмотку, намотанную, по меньшей мере, на одном из магнитных полюсов, при этом подвижное тело включает в себя постоянный магнит, расположенный напротив торцевых поверхностей вершин магнитных полюсов через магнитный зазор, при этом подвижное тело поддерживается таким образом, чтобы создавать возвратно-поступательное движение в направлении, перпендикулярном направлению, в котором постоянный магнит расположен напротив магнитных полюсов, при этом подвижное тело возвратно-поступательно двигается, когда к обмотке приложено переменное напряжение, причем способ включает в себя:
осуществление управления с обратной связью переменным напряжением, в котором переменное напряжение прикладывают к обмотке в течение первой половины периода управления и в котором индуцируемую электродвижущую силу, генерируемую в обмотке в течение второй половины периода управления, используют в качестве управляющего сигнала.
При осуществлении способа возбуждения электромагнитного силового привода согласно настоящему изобретению обмотку возбуждают только в первой половине периода управления. Благодаря этой особенности появляется возможность уменьшить количество составных частей схемы инвертора, которая прикладывает переменное напряжение к обмотке, что делает возможной рентабельную разработку схемы возбуждения. При осуществлении способа возбуждения электромагнитного силового привода согласно настоящему изобретению управляющие сигналы можно обнаруживать без ограничений во времени, точности напряжения, точности тока и т.п. Это позволяет уменьшить количество частей с датчиками. Кроме того, появляется возможность уменьшить количество проводных шин, ведущих к схеме управления, такой, как центральный процессор и т.п., что делает возможной рентабельную разработку схемы возбуждения. Поэтому способ возбуждения электромагнитного силового привода согласно настоящему изобретению может обеспечить дешевую схему возбуждения.
Краткое описание чертежей
Задачи и признаки настоящего изобретения станут очевидными из нижеследующего описания вариантов осуществления, приводимых со ссылками на прилагаемые чертежи, при этом:
на фиг. 1А и 1В представлены виды спереди, иллюстрирующие электромагнитный силовой привод, возбуждаемый способом, в соответствии с одним вариантом осуществления настоящего изобретения;
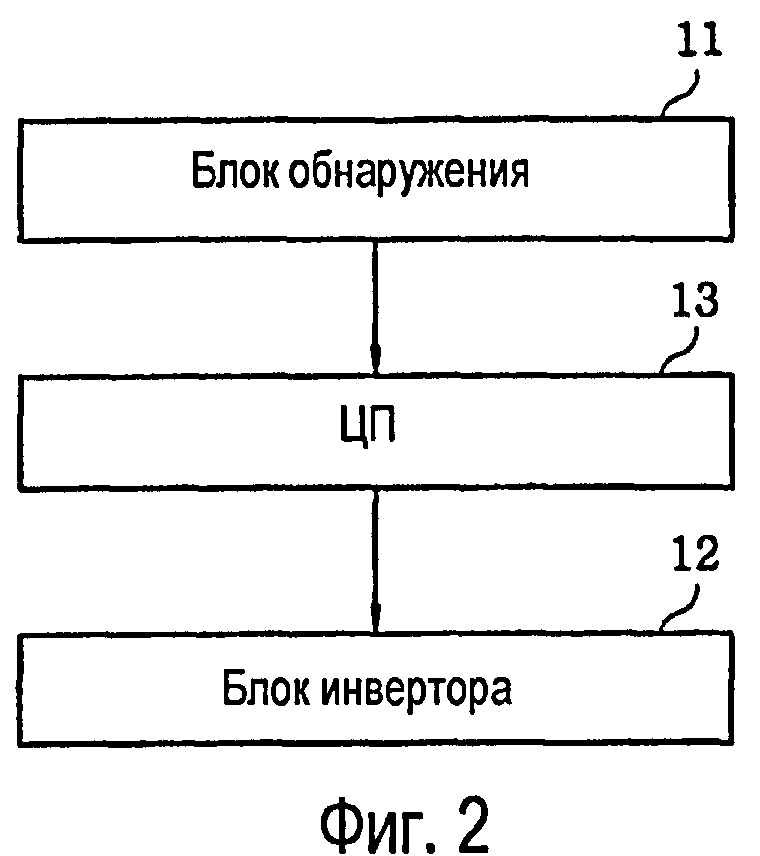
на фиг. 2 представлена блок-схема, иллюстрирующая конфигурацию схемы возбуждения электромагнитного силового привода, показанного на фиг. 1;
на фиг. 3 представлена принципиальная схема, иллюстрирующая внутреннюю конфигурацию блока обнаружения схемы возбуждения, показанной на фиг. 2;
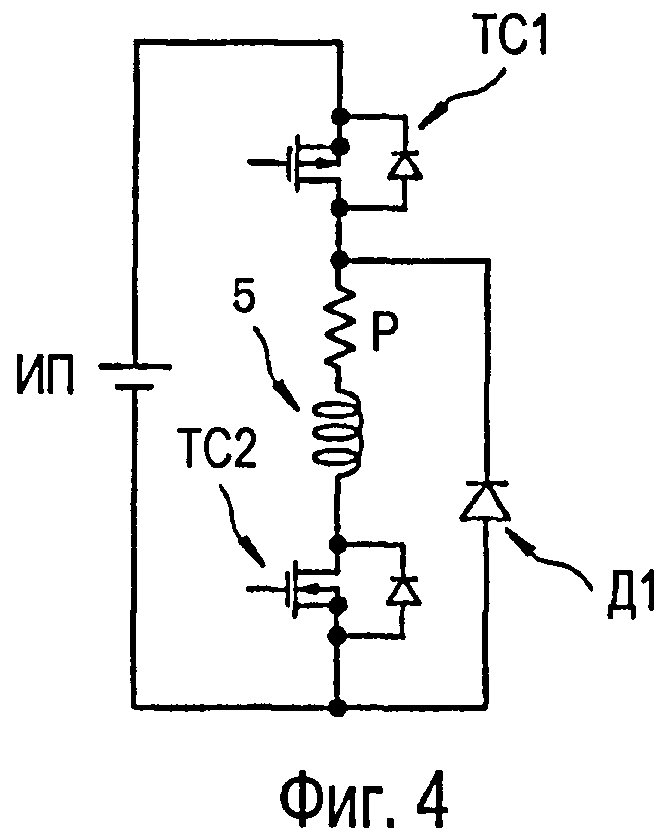
на фиг. 4 представлена принципиальная схема, иллюстрирующая внутреннюю конфигурацию схемы инвертора схемы возбуждения, показанной на фиг. 2;
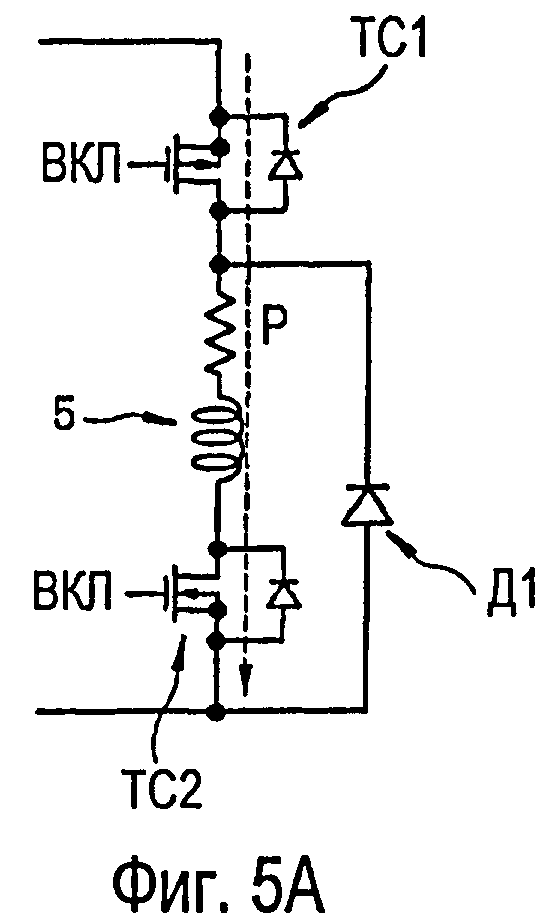
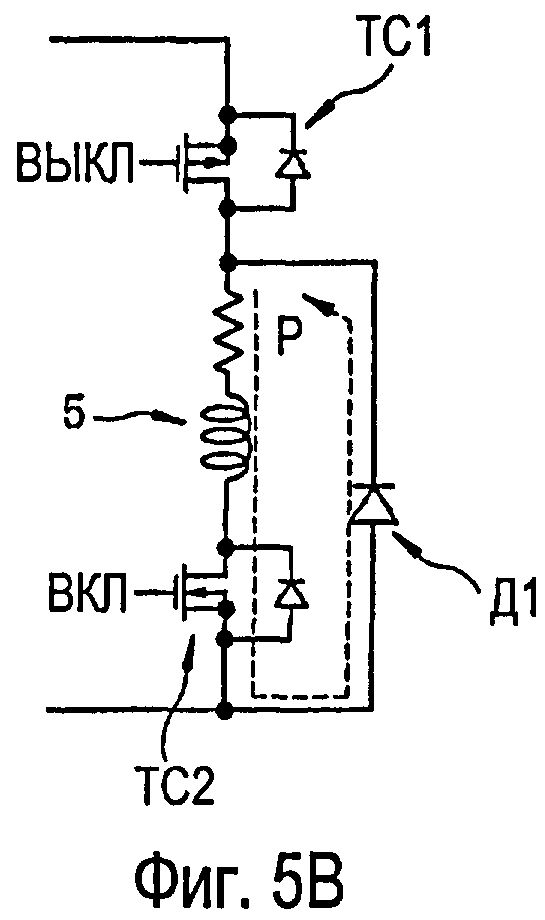
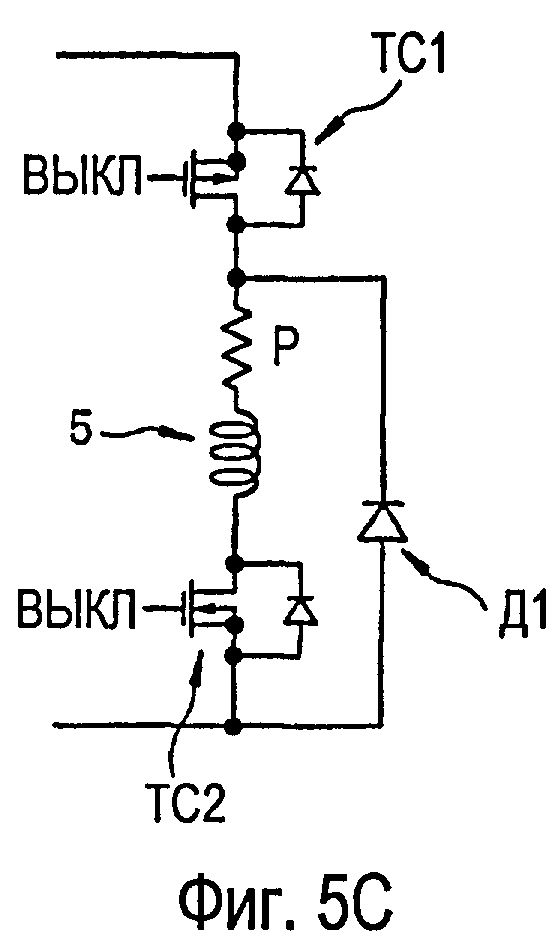
на фиг. 5А, 5В и 5С представлены принципиальные схемы для пояснения работы схемы инвертора, показанной на фиг. 4;
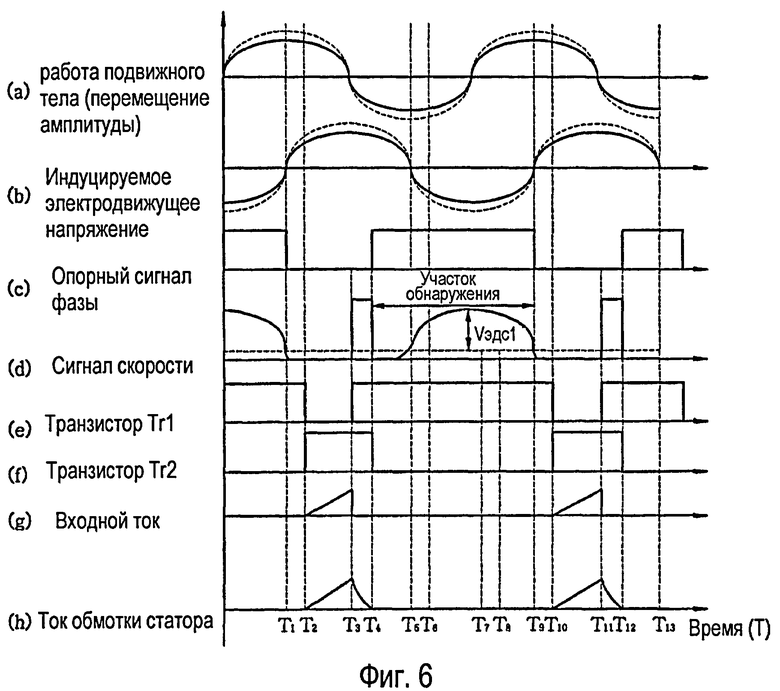
на фиг. 6 показана временная диаграмма для пояснения способа возбуждения электромагнитного силового привода в соответствии с одним вариантом осуществления настоящего изобретения; и
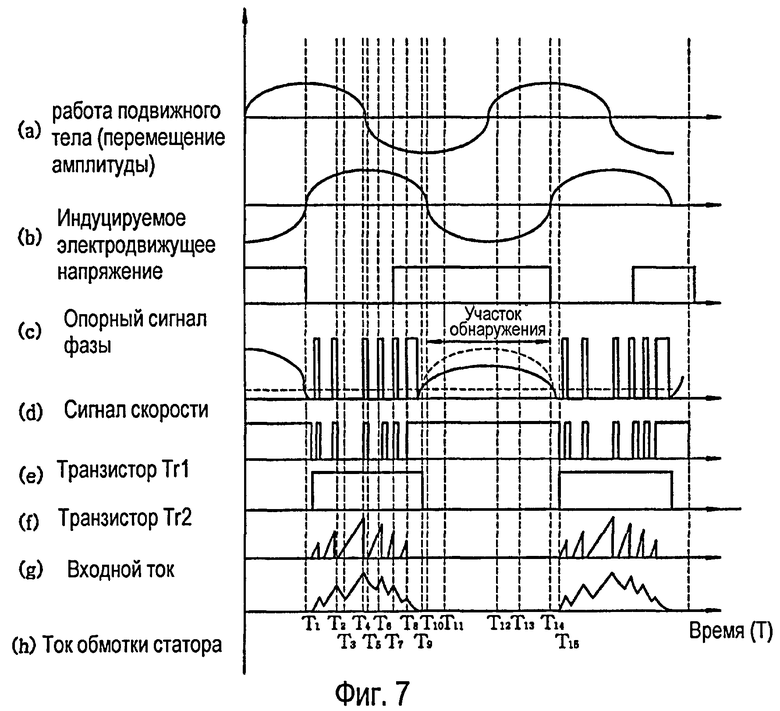
на фиг. 7 показана временная диаграмма для пояснения модифицированного примера, проиллюстрированного на фиг. 6 способа возбуждения электромагнитного силового привода.
Подробное описание предпочтительных вариантов осуществления
Ниже описан способ возбуждения электромагнитного силового привода в соответствии с одним вариантом осуществления настоящего изобретения со ссылками на прилагаемые чертежи, являющиеся частью описания.
Конфигурация электромагнитного силового привода
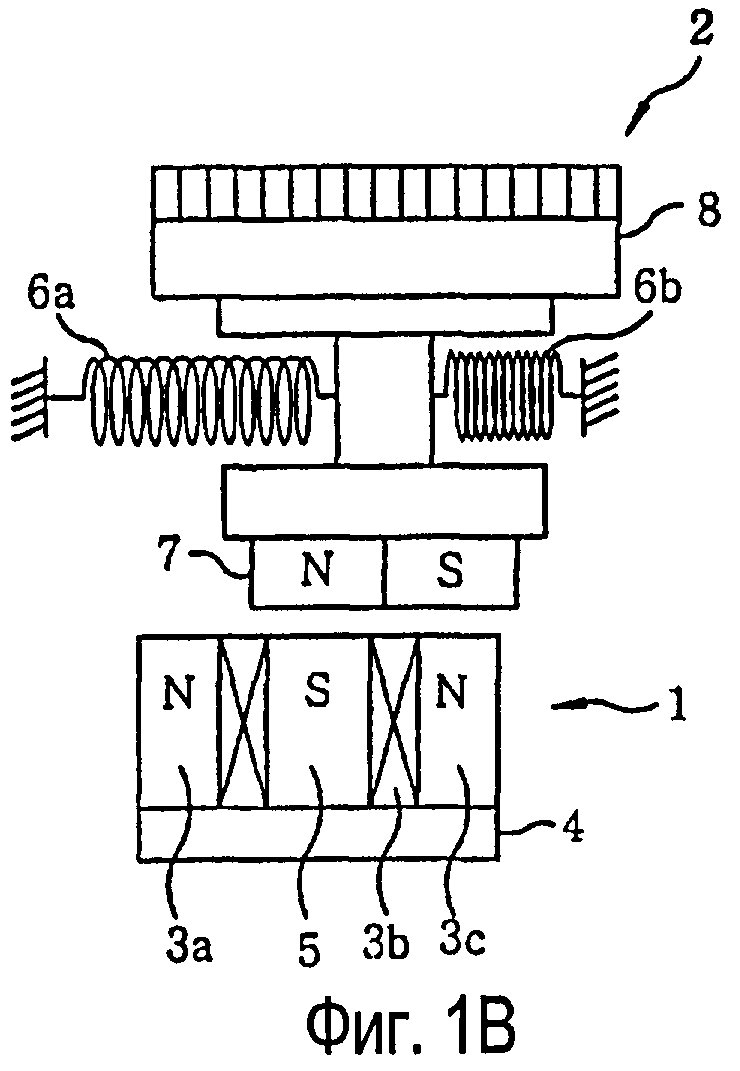
Как показано на фиг. 1А и 1В, электромагнитный силовой привод, возбуждаемый способом в соответствии с одним вариантом осуществления настоящего изобретения, включает в себя в качестве своих основных составных частей статор 1 и подвижное тело 2. Статор 1 включает в себя Ш-образный сердечник 4, снабженный тремя магнитными полюсами 3а, 3b и 3с, и обмотку 5, намотанную на магнитном полюсе 3b. Подвижное тело 2 расположено напротив свободных торцевых поверхностей магнитных полюсов 3а, 3b и 3с, а между ними оставлен магнитный зазор. Подвижное тело 2 включает в себя постоянный магнит 7 и проницаемое магнитным потоком тело 8, служащее в качестве спинки ярма. Подвижное тело 2 совершает возвратно-поступательное движение вдоль магнитных полюсов 3а, 3b и 3с и поддерживается с возможностью возврата в центральное положение диапазона движения пружинами 6а и 6b.
Постоянный магнит 7 имеет разные магнитные полюса, расположенные в направлении слева направо, т.е. в направлении его возвратно-поступательного движения. Расстояние между центрами магнитных полюсов постоянного магнита 7 задано, по существу, равным расстоянию между центрами магнитных полюсов 3а и 3b и расстоянию между центрами магнитных полюсов 3b и 3с. Ширина W1 постоянного магнита 7 меньше, чем максимальная ширина W2 магнитных полюсов 3а и 3с, расположенных на левом и правом концах. Сумма хода ST подвижного тела 2 и ширины W1 равна максимальной ширине W2 или меньше нее (W2≥W1+ST).
Конфигурация схемы возбуждения
Обращаясь к фиг. 2, схема возбуждения для электромагнитного силового привода включает в себя блок 11 обнаружения для обнаружения опорного сигнала фазы, указывающего положение, в котором направление движения подвижного тела 2 изменяется на обратное, и сигнала скорости, указывающего скорость подвижного тела 2, а также центральный процессор (ЦП) 13 для управления схемой 12 инвертора на основе опорного сигнала фазы и сигнала скорости, обнаруживаемых блоком 11 обнаружения, чтобы таким образом управлять временем приложения переменного напряжения, прикладываемого к обмотке 5.
Как показано на фиг. 3, блок 11 обнаружения включает в себя усилитель УС, имеющий операционный усилитель ОУ1 и компаратор КОМП, имеющий операционный усилитель ОУ2 и транзисторную схему ТС. Усилитель УС усиливает напряжение между концами обмотки 5 (напряжение между входными клеммами ВХ1 и ВХ2) с коэффициентом усиления, определяемым сопротивлением резистора Р1, а затем выдает усиленный сигнал в операционный усилитель ОУ2 и на выходную клемму ВЫХ1 в качестве сигнала скорости. Компаратор КОМП обнаруживает опорный сигнал фазы, а затем выдает его на выходную клемму ВЫХ2. В альтернативном варианте, ЦП 13 может обнаруживать опорный сигнал фазы, сравнивая инвертированный входной сигнал и выходной сигнал операционного усилителя ОУ1 путем использования порта СУМ или встроенного компаратора. В этом случае компаратор КОМП можно исключить.
Как показано на фиг. 4, схема 12 инвертора включает в себя источник питания ИП, верхнюю транзисторную схему ТС1, нижнюю транзисторную схему ТС2 и диод Д1. В случае если обе - верхняя и нижняя - транзисторные схемы ТС1 и ТС2 находятся во включенном состоянии, показанном на фиг. 5А, схема 12 инвертора прикладывает переменное напряжение к обмотке 5. Если верхнюю транзисторную схему ТС1 выключают в состоянии, показанном на фиг. 5А, электрический ток циркулирует по обмотке 5 посредством инерционного эффекта при вращении, как показано на фиг. 5В. Далее, если нижнюю транзисторную схему ТС2 выключают в состоянии, показанном на фиг. 5В, то устанавливается состояние отсутствия намагничивания, как показано на фиг. 5С. Таким образом, схема 12 инвертора управляет переменным напряжением, прикладываемым к обмотке 5, за счет совместного управления времени включения, времени выключения и операцией включения-выключения верхней и нижней транзисторных схем ТС1 и ТС2. При этой конфигурации появляется возможность уменьшить количество транзисторных схем по сравнению с обычной схемой инвертора (мостовой схемой), в которой применяются четыре транзисторные схемы. Это дает возможность уменьшить количество проводных шин, ведущих к схеме возбуждения и ЦП 13.
Способ возбуждения
Если переменное напряжение с прямоугольной формой волны прикладывается к обмотке 5 электромагнитного силового привода, имеющего вышеописанную конфигурацию, то движущую силу в подвижном теле 2 генерирует магнитная сила магнитного потока между магнитными полюсами 3а и 3b и постоянным магнитом 7, в то время как магнитные полюса 3а, 3b и 3с имеют полярность, показанную на фиг. 1А. Таким образом, подвижное тело 2 движется влево на фиг. 1А. В отличие от этого, в течение того времени, когда магнитные полюса 3а, 3b и 3с намагничены с полярностью, показанной на фиг. 1В, движущую силу в подвижном теле 2 генерирует магнитная сила магнитного потока между магнитными полюсами 3b и 3с и постоянным магнитом 7. Таким образом, подвижное тело 2 движется вправо на фиг. 1В. Когда к обмотке 5 не приложено переменное напряжение, подвижное тело 2 возвращается в центральное положение диапазона движения под влиянием отклоняющих сил пружин 6а и 6b. Таким образом, подвижное тело 2 совершает возвратно-поступательное движение в направлениях влево и вправо, когда к обмотке 5 приложено переменное напряжение.
Как показано на фиг. 6, в данном варианте осуществления ЦП 13 прикладывает переменное напряжение к обмотке 5 в течение одной половины периода управления. В течение другой половины периода управления, т.е. в состоянии отсутствия намагничивания, центральный процессор 13 осуществляет управление с обратной связью, при котором опорный сигнал фазы (см. обозначение (с) на фиг. 6) и сигнал скорости (см. обозначение (d) на фиг. 6) обнаруживаются из индуцируемого электродвижущего напряжения (см. обозначение (b) на фиг. 6) с синусоидальной формой волны и используются в качестве управляющих сигналов. При этом способе возбуждения обмотка 5 намагничивается в течение одной половины периода управления. Благодаря этой особенности появляется возможность уменьшить количество составных частей схемы 12 инвертора, которая прикладывает переменное напряжение к обмотке 5, что делает возможной рентабельную разработку схемы возбуждения. Кроме того, поскольку управляющие сигналы можно обнаруживать без ограничений во времени, точности напряжения, точности тока и т.п., появляется возможность уменьшить количество датчиковых участков. Дополнительно, появляется возможность уменьшить количество проводных шин, ведущих к центральному процессору 13, что делает возможной рентабельную разработку схемы возбуждения. Более того, поскольку период, когда обычно поддерживается состояние отсутствия намагничивания для целей считывания, можно использовать при намагничивании в данном варианте осуществления возможность улучшить выходные рабочие параметры при том же самом входном напряжении.
Центральный процессор 13 предпочтительно использует индуцируемое электродвижущее напряжение в качестве своих управляющих сигналов, в то время как индуцируемое электродвижущее напряжение увеличивают от нуля до максимального значения. В течение времени, когда индуцируемое электродвижущее напряжение увеличивают от нуля до максимального значения, получающаяся разность напряжений втрое или вчетверо превышает разность напряжений, имеющуюся при обычном управлении, а различие в изменении напряжения на 1 мм перемещения впятеро превышает различие в изменении напряжения при обычном управлении. Следовательно, при осуществлении предлагаемого способа возбуждения усилитель УС может иметь степень точности, равную примерно 1/5 от степени точности, требуемой в обычном усилителе. Это делает возможной рентабельную разработку блока 11 обнаружения. Такое смягчение требований к степени точности дает возможность изменить способ управления и сэкономить на стоимости центрального процессора 13, что было недостижимо в обычной схеме возбуждения.
Центральный процессор 13 может использовать в качестве своих управляющих сигналов максимальное значение индуцируемого электродвижущего напряжения, имеющего синусоидальную форму волны. При этой конфигурации управление можно осуществлять просто путем обнаружения максимального значения индуцируемого электродвижущего напряжения, что дает возможность сэкономить на стоимости центрального процессора 13. В альтернативном варианте центральный процессор 13 может использовать в качестве своих управляющих сигналов интегральное значение индуцируемого электродвижущего напряжения, имеющего синусоидальную форму волны. При этой конфигурации появляется возможность обнаружить потерянную энергию в течение половины периода управления, которую нельзя обнаружить при использовании максимального значения индуцируемого электродвижущего напряжения или частичного напряжения. Поэтому оказывается возможным повышение точности управления и снижение стоимости центрального процессора 13 или датчика.
Центральный процессор 13 может использовать, по меньшей мере, два из этих способов управления совместно. Как показано на фиг. 7, центральный процессор 13 может вычислять отклонение между индуцируемой электродвижущей силой и заданным значением при каждом перемещении подвижного тела 2, а также может изменять коэффициент заполнения выходного управляющего сигнала в зависимости от вычисляемого таким образом отклонения. При осуществлении этого способа возбуждения волны треугольной формы, необходимые при широтно-импульсной модуляции (ШИМ), можно генерировать посредством программных средств, а не аппаратных средств. Это делает возможным снижение стоимости.
Хотя изобретение проиллюстрировано и описано применительно к вариантам его осуществления, для специалистов в данной области техники будет очевидно, что различные изменения и модификации могут быть выполнены без отклонения от рамок изобретения, определяемых нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бездатчикового управления линейным возвратно-поступательным вентильно-индукторным парнофазным генератором | 2016 |
|
RU2658654C2 |
| СПОСОБ И УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МАГНИТНЫХ СИЛОВЫХ ВЗАИМОДЕЙСТВИЙ В МЕХАНИЧЕСКУЮ ЭНЕРГИЮ | 2008 |
|
RU2403668C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛИНЕЙНЫМ ВИБРАЦИОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395156C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2339147C1 |
| Бесконтактный стабилизированный по напряжению генератор переменного тока с комбинированным возбуждением | 2019 |
|
RU2713470C1 |
| Электрическая машина с возбуждением от постоянных магнитов | 1987 |
|
SU1495940A1 |
| СПОСОБ УПРАВЛЕНИЯ МОМЕНТОМ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА ФОРМИРОВАНИЕМ В ЭЛЕКТРОПРИВОДЕ ЧАСТОТНО-РЕГУЛИРУЕМОГО СИГНАЛА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2010 |
|
RU2458805C1 |
| Способ запуска газотурбинного двигателя | 2018 |
|
RU2680287C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2017 |
|
RU2652102C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ГИБРИДНЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2405241C2 |

Изобретение относится к области электротехники и может быть использовано для возбуждения электромагнитного силового привода вибрационного типа, предпочтительно применяемого в электробритве для сообщения подвижному телу возвратно-поступательного движения. Техническим результатом является уменьшение деталей и сокращение затрат, необходимых для установки датчика. Электромагнитный силовой привод включает в себя статор и подвижное тело. Статор включает в себя сердечник, снабженный магнитными полюсами, и обмотку, намотанную, по меньшей мере, на одном из магнитных полюсов. Подвижное тело включает в себя постоянный магнит и поддерживается таким образом, чтобы создавать возвратно-поступательное движение в направлении, перпендикулярном направлению, в котором постоянный магнит расположен напротив магнитных полюсов. Подвижное тело возвратно-поступательно двигается, когда к обмотке приложено переменное напряжение. Способ возбуждения электромагнитного силового привода для возбуждения электромагнитного силового привода включает в себя осуществление управления с обратной связью переменным напряжением, при котором переменное напряжение прикладывают к обмотке в течение первой половины периода управления и при котором индуцируемую электродвижущую силу, генерируемую в обмотке в течение второй половины периода управления, используют в качестве управляющего сигнала. 8 з.п. ф-лы, 10 ил.
1. Способ возбуждения электромагнитного силового привода для возбуждения электромагнитного силового привода, включающего в себя статор и подвижное тело, причем статор включает в себя сердечник, снабженный множеством магнитных полюсов, и обмотку, намотанную, по меньшей мере, на одном из магнитных полюсов, при этом подвижное тело включает в себя постоянный магнит, расположенный напротив торцевых поверхностей вершин магнитных полюсов через магнитный зазор, при этом подвижное тело поддерживается таким образом, чтобы создавать возвратно-поступательное движение в направлении, перпендикулярном направлению, в котором постоянные магнит расположен напротив магнитных полюсов, при этом подвижное тело возвратно-поступательно двигается, когда к обмотке приложено переменное напряжение, причем способ содержит: осуществляют управление с обратной связью переменным напряжением, причем переменное напряжение прикладывают к обмотке в течение первой половины периода управления, а индуцируемую электродвижущую силу, генерируемую в обмотке в течение второй половины периода управления, используют в качестве управляющего сигнала.
2. Способ возбуждения электромагнитного силового привода по п.1, в котором индуцируемая электродвижущая сила содержит индуцируемое электродвижущее напряжение с синусоидальной формой волны, генерируемое в обмотке в течение второй половины периода управления.
3. Способ возбуждения электромагнитного силового привода по п.2, в котором индуцируемое электродвижущее напряжение с синусоидальной формой волны используют в качестве управляющего сигнала, в то время как индуцируемое электродвижущее напряжение увеличивается от нуля до максимального значения.
4. Способ возбуждения электромагнитного силового привода по п.3, в котором максимальное значение индуцируемого электродвижущего напряжения используют в качестве управляющего сигнала.
5. Способ возбуждения электромагнитного силового привода по п.2, в котором интегральное значение индуцируемого электродвижущего напряжения используют в качестве управляющего сигнала.
6. Способ возбуждения электромагнитного силового привода по п.1, в котором переменное напряжение прикладывают к обмотке посредством схемы инвертора, включающей в себя транзисторную схему, причем управление транзисторной схемой является друхпозиционным для приложения переменного напряжения в обмотку за счет инерционного эффекта при вращении.
7. Способ возбуждения электромагнитного силового привода по п.6, в котором транзисторная схема схемы инвертора включает в себя верхнюю и нижнюю транзисторные схемы, и в котором управление временем включения, временем выключения и операцией включения-выключения верхней и нижней транзисторных схем осуществляют совместно.
8. Способ возбуждения электромагнитного силового привода по п.7, в котором нижнюю транзисторную схему поддерживают в выключенном состоянии в течение первой половины периода управления.
9. Способ возбуждения электромагнитного силового привода по п.1, в котором отклонение индуцируемой электродвижущей силы от заданного значения вычисляют при каждом перемещении подвижного тела, и в котором коэффициент заполнения выходного управляющего сигнала изменяют в зависимости от вычисляемого таким образом отклонения.
| ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2279173C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1989 |
|
RU2141716C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2279757C2 |
| СПОСОБ ПРОИЗВОДСТВА ВАФЕЛЬ (ВАРИАНТЫ) | 2010 |
|
RU2431302C1 |
| US 5023528 A, 11.06.1991 | |||
| Гаечный ключ Прокопченко | 1987 |
|
SU1698044A1 |

