Область техники
Настоящее изобретение относится к способу управления линейным вибрационным двигателем, который, предпочтительно, применим к электробритве с возвратно-поступательным движением и который устроен так, чтобы вызывать возвратно-поступательное перемещение подвижного тела.
Уровень техники
По существующему уровню техники известен линейный вибрационный двигатель, который включает в себя статор, сформированный из электромагнита или постоянного магнита, вибратор, снабженный постоянным магнитом или электромагнитом, и блок управления для управления током возбуждения, который подается на обмотку электромагнита, причем вибратор выполняет возвратно-поступательные движения относительно статора. В линейном вибрационном двигателе необходимо обнаруживать смещение амплитуды, скорость и ускорение вибратора, чтобы удерживать амплитуду на постоянном уровне. С этой точки зрения, обычный линейный вибрационный двигатель имеет период без питания, в течение которого обнаруживают смещение амплитуды, скорость и ускорение вибратора (например, см. публикацию № 2001-16892 японского патента).
В случае, когда предпринимается попытка подачи электрического тока на обмотку электромагнита, период без питания необходимо сократить. И наоборот, если предпринимается попытка достаточно продлить период без питания, то засечка времени, за которой электрический ток подается на обмотку электромагнита, слишком задерживается для достаточной подачи электрического тока. Для обнаружения смещения амплитуды, скорости и ускорения вибратора за короткий период времени управление необходимо выполнять посредством микрокомпьютера, который использует высокоточное внешнее колебание. Это приводит к сложностям при сохранении стоимости и уменьшении размера схемы.
Сущность изобретения
В виду вышесказанного, настоящее изобретение предоставляет способ управления линейным вибрационным двигателем, способный выполнять управление, по которому электрический ток может подаваться на обмотку экономичным и эффективным способом.
Согласно аспекту настоящего изобретения предоставлен способ управления линейным вибрационным двигателем, который включает в себя статор, сформированный из электромагнита с обмоткой или постоянного магнита, вибратор, снабженный постоянным магнитом или электромагнитом с обмоткой, и блок управления для управления током возбуждения, подаваемым на обмотку электромагнита, причем линейный вибрационный двигатель выполнен с возможностью совершать возвратно-поступательные движения вибратора относительно статора, причем способ включает в себя этапы, на которых: обеспечивают период без питания, в течение которого через обмотку электромагнита не протекает ток возбуждения, причем период без питания равен или больше 1/4 цикла; обнаруживают электродвижущее напряжение, индуцируемое в обмотке, когда вибратор выполняет колебательное движение в течение периода без питания; обнаруживают смещение, скорость или ускорение вибратора на основании обнаруженного электродвижущего напряжения; и оптимальным образом управляют током возбуждения, подаваемым на обмотку, на основании обнаруженного смещения, скорости или ускорения вибратора, а также засечки времени подачи тока.
С помощью способа управления линейным вибрационным двигателем настоящего изобретения предоставляется возможность выполнять управление, по которому электрический ток может быть подан на обмотку экономичным и эффективным образом.
Краткое описание чертежей
Цели и отличительные признаки настоящего изобретения будут очевидны из следующего описания предпочтительных вариантов осуществления в сочетании с прилагаемыми чертежами, на которых:
фиг.1 - структурная схема, иллюстрирующая линейный вибрационный двигатель согласно одному варианту осуществления настоящего изобретения;
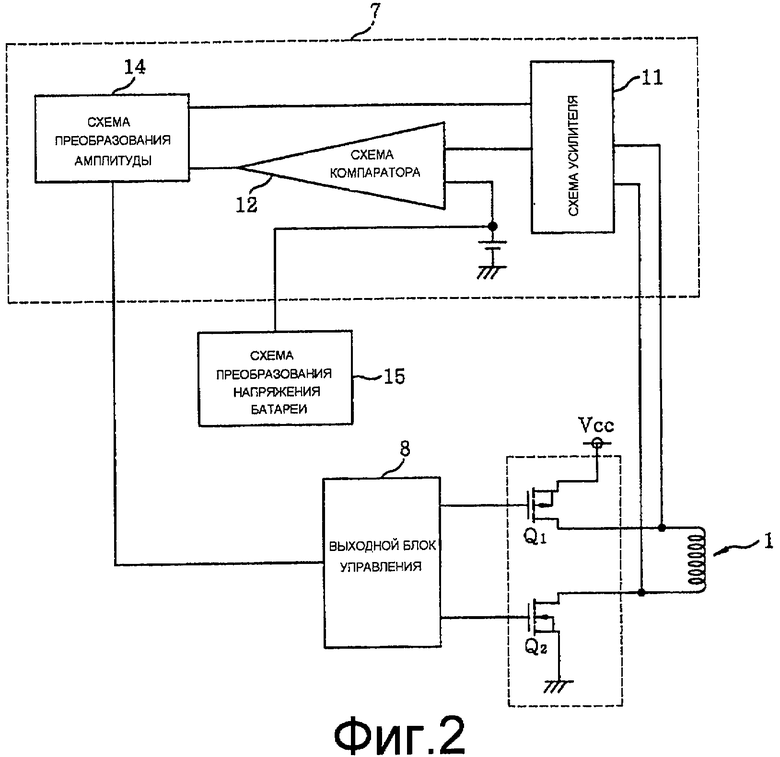
фиг.2 - принципиальная схема, иллюстрирующая блок обнаружения амплитуды и схему подачи питания линейного вибрационного двигателя, показанного на фиг.1, где опорное напряжение регулируется в зависимости от напряжения батареи;
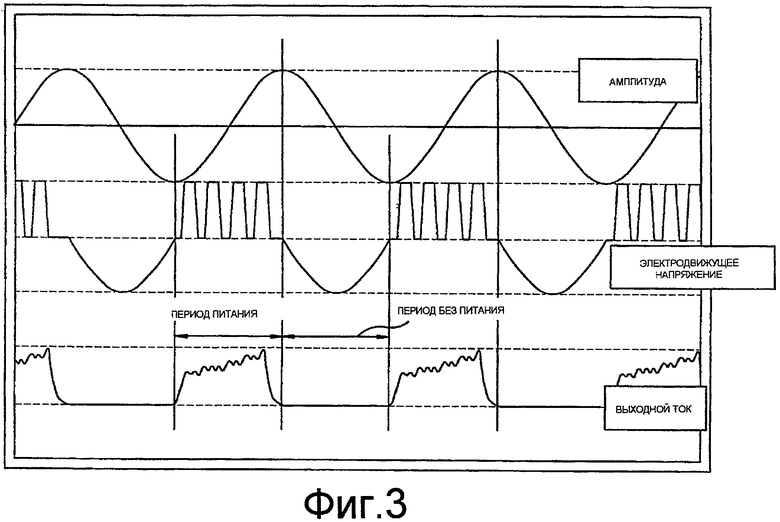
фиг.3 - график формы волны для описания засечки времени для измерения электродвижущего напряжения обмотки;
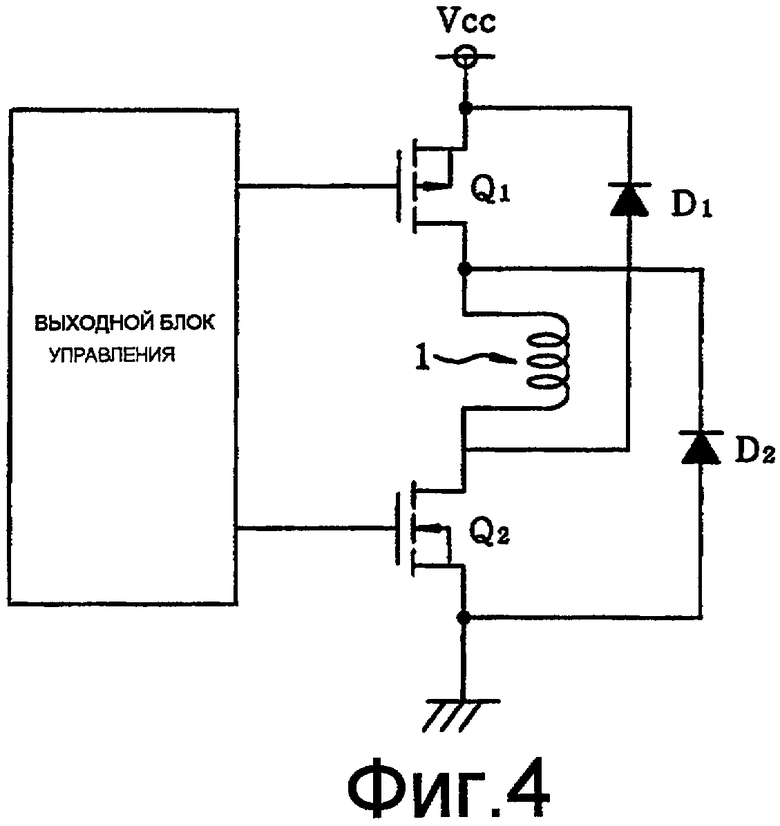
фиг.4 - принципиальная схема, иллюстрирующая модифицированный пример схемы подачи питания, показанной на фиг.2;
фиг.5 - график формы волны для описания засечки времени для измерения электродвижущего напряжения обмотки в обычном линейном вибрационном двигателе; и
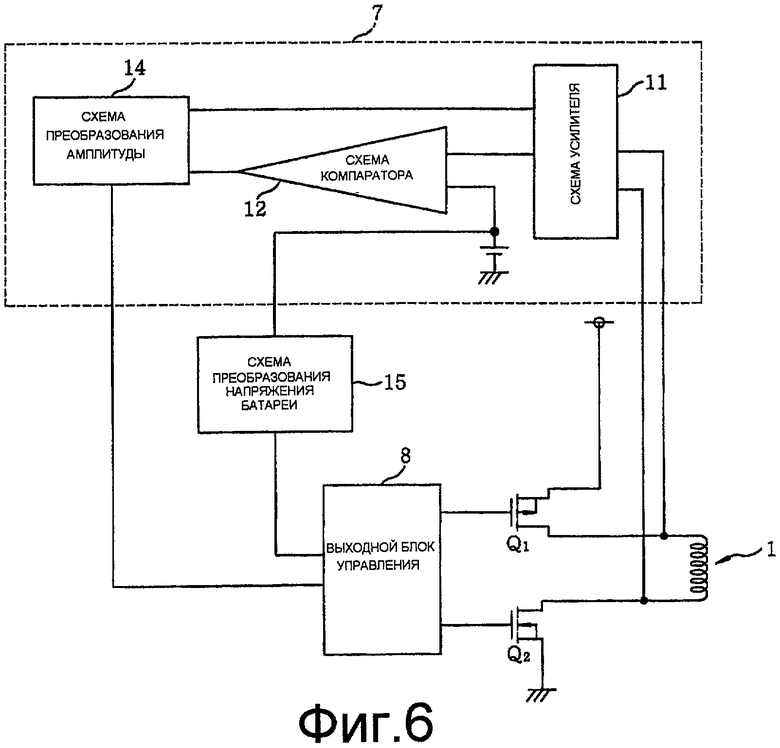
фиг.6 - принципиальная схема, иллюстрирующая блок обнаружения амплитуды и схему подачи питания линейного вибрационного двигателя, показанного на фиг.1, где опорное напряжение регулируется выходным блоком управления в зависимости от напряжения батареи.
Подробное описание предпочтительных вариантов осуществления
Ниже со ссылкой на сопутствующие чертежи подробно описан линейный вибрационный двигатель и способ его управления согласно варианту осуществления настоящего изобретения.
Ссылаясь на фиг.1, линейный вибрационный двигатель, согласно варианту осуществления настоящего изобретения, включает в себя статор 2 с обмоткой 1, вибратор 4 с постоянным магнитом 3, каркас 5 для удержания вибратора 4, пружины 6a и 6b, удерживаемые между вибратором 4 и каркасом 5, блок 7 обнаружения амплитуды для обнаружения амплитуды колебания вибратора 4 на основании электродвижущего напряжения, индуцируемого в обмотке 1, и выходной блок 8 управления для управления путем широтно-импульсной модуляции (ШИМ) тока возбуждения, подаваемого на обмотку 1, на основании результатов обнаружения блока 7 обнаружения амплитуды. Как показано на фиг.2, блок 7 обнаружения амплитуды включает в себя схему 11 усилителя для усиления напряжения между противоположными концами обмотки 1 и схему 12 компаратора для сравнения усиленного напряжения с опорным напряжением V0, то есть с нулевым напряжением. Время T0, когда усиленное напряжение становится равно опорному напряжению V0, рассматривается как точка поворота амплитуды вибрации. Выходной блок 8 управления устанавливает период без питания, в течение которого ток возбуждения не протекает через обмотку 1, равным 1/4 цикла от точки поворота или дольше. Блок 7 обнаружения амплитуды, сверх того, включает в себя схему 14 преобразования амплитуды для периодической выборки электродвижущего напряжения обмотки 1 в течение упомянутого периода без питания и для вычисления амплитуды колебания с помощью максимальной величины выборочных электродвижущих напряжений.
Как показано на фиг.5, в обычном линейном вибрационном двигателе амплитуда колебания обнаруживается на основании временной разницы между временем T0 в точке поворота и временем T1, когда электродвижущее напряжение становится равно заданному постоянному напряжению V1. Тем не менее, поскольку период времени для обнаружения слишком короткий, в обычном способе обнаружения возможны ошибки измерения и легкое влияние шумов, что уменьшает точность обнаружения. При использовании линейного вибрационного двигателя, согласно настоящему варианту осуществления, в течение периода без питания схемой 14 преобразования амплитуды периодически производится выборка электродвижущего напряжения обмотки, и амплитуда колебания вычисляется посредством максимальной величины выборочных электродвижущих напряжений. Следовательно, обеспечивается возможность надежного обнаружения амплитуды колебания, даже если засечка времени выборки в некоторой степени сдвинута. Сверх того, до запитывания обмотки 1 выдерживается достаточное время. Следовательно, в вибрационном линейном двигателе настоящего варианта осуществления предоставляется возможность своевременного запитывания обмотки 1, таким образом эффективно используя двигатель и экономя электроэнергию.
Для эффективного питания предпочтительно, чтобы обмотка запитывалась в течение 1/20 цикла от точки максимального смещения или в течение 1/4 цикла от точки максимальной скорости. Также предоставляется возможность запитывания обмотки 1 с более точной засечкой времени, если точка максимальной амплитуды или точка максимальной скорости обнаруживается микрокомпьютером. Если для целей управления используется микрокомпьютер, то предоставляется возможность точно обнаруживать амплитуду колебания, даже если засечка времени выборки смещена в некоторой степени. Благодаря этой особенности, по сравнению с предшествующим уровнем техники линейный вибрационный двигатель может управляться более точно, даже если используется колебательный контур низкой точности или тактовый генератор колебаний, встроенный в микрокомпьютер.
Использование микрокомпьютера и пролонгация периода без питания обеспечивают возможность продления периода для обнаружения точки максимального смещения по сравнению с предшествующим уровнем техники. Например, период для обнаружения точки максимального смещения может быть установлен равным 300 микросекундам, что дольше обычного периода обнаружения на 100 микросекунд или более. Это обеспечивает возможность управления линейным вибрационным двигателем без упущения точки максимального смещения, даже когда точка максимального смещения задерживается из-за резких изменений нагрузки.
Как правило, ток возбуждения, подаваемый на обмотку 1, управляется путем широтно-импульсной модуляции (ШИМ) посредством верхнего и нижнего переключающих устройств Q1 и Q2 (см. фиг.2) схемы инвертора для питания обмотки 1. Также можно применять управление посредством взвешенной широтно-импульсной модуляции верхнего переключающего устройства Q1, в случае управления, когда период без питания составляет половину цикла. Благодаря этому управлению предоставляется возможность сохранять постоянную засечку времени переключения для двигателя и подавать электрический ток по действительной засечке времени, даже когда величина тока регулируется в соответствии с изменениями нагрузки.
Напряжение батареи Vcc обнаруживается в масштабе реального времени посредством схемы 15 преобразования напряжения батареи, показанной на фиг.6. На основании детектированного напряжения выходной блок 8 управления выполняет управление регулированием амплитуды. Если переключающие устройства Q1 и Q2 управляются по одному и тому же образцу независимо от напряжения, то электрический ток и амплитуда колебания увеличатся при увеличении напряжения батареи. Тем не менее, с помощью вышеописанной конфигурации, посредством которой выполняется управление с обратной связью по напряжению, предоставляется возможность управления амплитудой колебания на постоянном уровне, независимо от разности напряжений, вызываемой изменением емкости батареи.
Альтернативно, как показано на фиг.2, колебание амплитуды из-за напряжения батареи Vcc может быть предотвращено путем регулирования опорного напряжения схемы 12 компаратора посредством схемы 15 преобразования напряжения батареи. Если выходной блок 8 управления выполняет управление по одному и тому же образцу независимо от напряжения, то электрический ток и амплитуда колебания увеличатся при повышении напряжения батареи. Кроме того, электрический ток и амплитуда колебания уменьшатся при понижении напряжения батареи. Тем не менее, если опорное напряжение регулируется, как описано выше, то обнаруживаемая скорость вибратора будет высокой, когда напряжение батареи остается на высоком уровне. Это обеспечивает возможность выполнения управления понижением скорости. С другой стороны, обнаруживаемая скорость вибратора будет низкой, когда напряжение батареи остается на низком уровне. Это обеспечивает возможность выполнения управления повышением скорости. Благодаря этой особенности, если опорное напряжение регулируется подходящим образом, то обеспечивается возможность ликвидации влияния напряжения батареи на амплитуду колебания и управления для удержания амплитуды колебания на постоянном уровне независимо от разности в напряжении батареи.
В случае, когда линейный вибрационный двигатель удерживается в состоянии высокой нагрузки в течение определенного периода времени, максимальная величина электродвижущего напряжения, обнаруживаемая в течение периода без питания, становится равна или меньше предопределенного опорного напряжения. Это состояние определяется как аномальное, и в этом случае работа линейного вибрационного двигателя может быть остановлена. Альтернативно, наличие аномалии может быть определено путем обнаружения, продолжает ли протекать через обмотку 1 электрический ток, величина которого больше определенной опорной величины.
Если при падении напряжения батареи ниже опорного напряжения линейный вибрационный двигатель внезапно останавливается, то есть вероятность того, что двигатель остановился из-за захвата пряди волос усов или бороды в бреющем механизме, например. Чтобы избежать подобной опасности, желательно медленно остановить двигатель путем постепенного уменьшения коэффициента заполнения верхнего переключающего устройства Q1.
В случае если электрический ток подается в линейный вибрационный двигатель в одном направлении, то полумостовая схема с верхним и нижним переключающими устройствами Q1 и Q2 может использоваться в качестве схемы инвертора для питания обмотки 1, как показано на фиг.2. Это позволяет уменьшить количество переключающих устройств, таким образом сохраняя стоимость и уменьшая размер. На фиг.4 проиллюстрирована полумостовая схема. Диод D2 установлен между клеммой заземления полумостовой схемы и плюсовой клеммой обмотки, а диод D2 установлен между минусовой клеммой обмотки 1 и источником Vcc питания. Таким образом, снова обеспечивается возможность протекания электрического тока через обмотку 1, в результате чего линейный вибрационный двигатель приводится в действие эффективным образом.
В то же время, если нижнее переключающее устройство Q2 остается включенным в течение периода, который дольше половины цикла, то обеспечивается возможность эффективно использовать ток, протекающий через обмотку 1, и уменьшить электрический ток, протекающий через диод D1. Это позволяет использовать недорогие компоненты с меньшими размерами.
Несмотря на то что настоящее изобретение было проиллюстрировано и описано со ссылкой на предпочтительные варианты осуществления, специалистам в данной области техники будет очевидно, что в рамках объема настоящего изобретения, определенного в прилагаемой формуле изобретения, могут быть выполнены различные изменения и модификации. Например, настоящее изобретение также может быть применено к приводу, который включает в себя подвижный статор, который жестко не зафиксирован.

Изобретение относится к электротехнике и может быть использовано для управления линейным вибрационным двигателем, используемым в электробритвах с возвратно-поступательным перемещением подвижного элемента. Технический результат состоит в повышении экономичности подачи тока на обмотку двигателя. Управляемый линейный вибрационный двигатель включает в себя статор, сформированный из электромагнита с обмоткой, вибратор, снабженный постоянным магнитом, и блок управления током возбуждения, подаваемым на обмотку электромагнита. Блок управления током вызывает возвратно-поступательные движения вибратора относительно статора. Способ управления линейным вибрационным двигателем включает в себя этапы, на которых обеспечивают период без питания, в течение которого через обмотку электромагнита не протекает ток возбуждения. Период без питания равен или больше 1/4 цикла. Обнаруживают электродвижущее напряжение, индуцируемое в обмотке, когда вибратор выполняет колебательное движение в течение периода без питания. Далее обнаруживают смещение, скорость или ускорение вибратора на основании обнаруженного электродвижущего напряжения. Затем управляют током возбуждения, подаваемым на обмотку, на основании обнаруженного смещения, скорости или ускорения вибратора. 12 з.п. ф-лы, 6 ил.
1. Способ управления линейным вибрационным двигателем, который включает в себя статор, сформированный из электромагнита с обмоткой или постоянного магнита, вибратор, снабженный постоянным магнитом или электромагнитом с обмоткой, и блок управления для управления током возбуждения, подаваемым на обмотку электромагнита, причем линейный вибрационный двигатель выполнен с возможностью совершать возвратно-поступательные движения вибратора относительно статора, причем способ содержит этапы, на которых:
обеспечивают период без питания, в течение которого через обмотку электромагнита не протекает ток возбуждения, причем период без питания равен или больше 1/4 цикла;
обнаруживают электродвижущее напряжение, индуцируемое в обмотке, когда вибратор выполняет колебательное движение в течение периода без питания;
обнаруживают смещение, скорость или ускорение вибратора на основании обнаруженного электродвижущего напряжения и
управляют током возбуждения, подаваемым на обмотку, на основании обнаруженного смещения, скорости или ускорения вибратора.
2. Способ по п.1, в котором точка максимального смещения вибратора принимается в качестве опорной точки цикла, причем ток возбуждения подается на обмотку в течение 1/20 цикла от опорной точки.
3. Способ по п.1, в котором точка максимальной скорости вибратора принимается в качестве опорной точки цикла, причем ток возбуждения подается на обмотку в течение 1/4 цикла от опорной точки.
4. Способ по п.2, в котором точка максимального смещения вибратора обнаруживается в течение периода времени, который равен или больше 300 мкс.
5. Способ по п.1, в котором начальная засечка времени и конечная засечка времени периода времени включения переключающего устройства, которое образует схему инвертора для управления подаваемым на обмотку током возбуждения, удерживаются постоянными, причем операция переключения переключающего устройства управляется в течение времени включения.
6. Способ по п.1, в котором напряжение источника питания для тока возбуждения, подаваемого на обмотку, обнаруживается в течение периода без питания, причем колебание амплитуды вибратора, являющееся результатом изменения напряжения источника питания, регулируется на основании результата обнаружения напряжения источника питания.
7. Способ по п.1, в котором опорное напряжение схемы компаратора блока обнаружения амплитуды регулируется посредством напряжения периода без питания источника питания для тока возбуждения, подаваемого на обмотку, причем колебание амплитуды вибратора регулируется на основании регулируемого опорного напряжения.
8. Способ по п.1, в котором линейный вибрационный двигатель останавливается, если максимальная величина электродвижущего напряжения, обнаруживаемая в течение периода без питания, продолжает оставаться равной или меньше предопределенной величины в течение определенного периода времени или дольше.
9. Способ по п.1, в котором линейный вибрационный двигатель останавливается, если ток возбуждения, равный или больший предопределенной величины, продолжает течь через обмотку в течение определенного периода времени или дольше.
10. Способ по п.1, в котором если напряжение источника питания для тока возбуждения, подаваемого на обмотку, равно или меньше предопределенной величины, то линейный вибрационный двигатель медленно останавливается путем постепенного уменьшения коэффициента заполнения переключающего устройства, который формирует схема инвертора для управления током возбуждения, подаваемым на обмотку.
11. Способ по п.1, в котором полумостовая схема, включающая в себя пару верхних и нижних переключающих устройств, используется в качестве схемы инвертора для управления током возбуждения, подаваемым на обмотку.
12. Способ по п.11, в котором первый диод установлен между уровнем заземления полумостовой схемы и плюсовой клеммой обмотки, а второй диод установлен между источником питания и минусовой клеммой обмотки.
13. Способ по п.11 или 12, в котором нижнее переключающее устройство запитывается в течение периода времени, который дольше половины цикла.
| JP 56001790 А, 09.01.1981 | |||
| СПОСОБ УПРАВЛЕНИЯ ОДНООБМОТОЧНЫМ ЛИНЕЙНЫМ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ УДАРНОГО ДЕЙСТВИЯ | 1995 |
|
RU2127017C1 |
| Клетьевой подъемник | 1982 |
|
SU1063760A1 |
| DE 102004030326 A1, 02.02.2006 | |||
| Способ гидрофобизации поверхности высокодиспесных окислов металлов | 1973 |
|
SU476751A3 |
| US 6289680 В1, 18.09.2001 | |||
| US 4897582 A, 30.01.1990 | |||
| JP 11332213 A, 30.11.1999 | |||
| Способ изготовления стержневых крепежных изделий | 1979 |
|
SU860933A1 |
| JP 10243688 A, 11.09.1998. | |||

