Группа изобретений относится к области измерительной техники и преимущественно может быть использована для определения фрикционных параметров при взаимодействии колеса транспортного средства с поверхностью, в частности, с целью оценивания состояния поверхности взлетно-посадочных полос аэродромов или дорожных покрытий.
Известны способы определения коэффициента сцепления колеса с поверхностью аэродромного покрытия (RU 2298166 C1, 2007; RU 239003 С9, 2010), которые в общей для них части включают качение измерительного колеса по контролируемой поверхности, прикладывание к оси измерительного колеса тормозящего момента с использованием нагруженного на активную нагрузку генератора постоянного тока, вал которого соединен с осью измерительного колеса, определение начала проскальзывания измерительного колеса на основании сравнения сигналов с двух датчиков угловых скоростей, один из которых установлен на измерительном колесе, а другой - на ведомом колесе, поддержание состояния начала проскальзывания измерительного колеса на основании сравнения сигналов с датчиков угловых скоростей путем изменения величины тормозящего момента с помощью изменения активной нагрузки генератора, измерение силы сцепления измерительного колеса с поверхностью, обусловленной его трением о поверхность, с помощью тензочувствительного датчика силы и определение коэффициента сцепления измерительного колеса с поверхностью в виде отношения силы сцепления измерительного колеса с поверхностью к известной силе нормальной нагрузки измерительного колеса на поверхность.
Известен способ определения коэффициента сцепления колеса с поверхностью аэродромного покрытия (RU 2393460 C1, 2010), который включает качение измерительного колеса по контролируемой поверхности, прикладывание к оси измерительного колеса момента силы торможения с использованием нагруженного на активную нагрузку генератора постоянного тока, вал которого соединен с осью измерительного колеса, измерение момента силы торможения, создаваемого генератором постоянного тока, с помощью первого тензочувствительного датчика крутящего момента, установленного между валом ротора генератора постоянного тока и осью измерительного колеса, измерение момента силы сцепления колеса с поверхностью, обусловленной его трением о поверхность, с помощью второго тензочувствительного датчика крутящего момента, установленного на диске измерительного колеса, определение начала проскальзывания измерительного колеса на основании сравнения сигналов первого и второго тензочувствительных датчиков крутящего момента при их равенстве, поддержание состояния начала проскальзывания измерительного колеса на основании сравнения сигналов с первого и второго тензочувствительных датчиков крутящего момента с помощью изменения величины момента силы торможения путем изменения активной нагрузки генератора и определение коэффициента сцепления измерительного колеса с поверхностью в виде отношения момента силы сцепления измерительного колеса с поверхностью к произведению радиуса измерительного колеса на известную силу нормальной нагрузки измерительного колеса на поверхность.
Известен способ определения коэффициента сцепления колеса с поверхностью искусственного покрытия (RU 2442136 C1, 2012), который включает качение измерительного колеса по контролируемой поверхности, прикладывание к оси измерительного колеса момента силы торможения с использованием порошкового электромагнитного тормоза, ротор которого соединен с осью измерительного колеса, измерение момента силы торможения, создаваемого электромагнитным тормозом, с помощью первого тензочувствительного датчика крутящего момента, установленного между ротором электромагнитного тормоза и осью измерительного колеса, измерение момента силы сцепления колеса с поверхностью, обусловленной его трением о поверхность, с помощью второго тензочувствительного датчика крутящего момента, установленного на диске измерительного колеса, определение начала проскальзывания и измерительного колеса на основании сравнения сигналов первого и второго тензочувствительных датчиков крутящего момента при их равенстве, поддержание состояния начала проскальзывания измерительного колеса на основании сравнения сигналов с первого и второго тензочувствительных датчиков крутящего момента с помощью изменения величины момента силы торможения путем изменения тока через обмотку электромагнитного тормоза и определение коэффициента сцепления измерительного колеса с поверхностью в виде отношения момента силы сцепления измерительного колеса с поверхностью к произведению радиуса измерительного колеса на известную силу нормальной нагрузки измерительного колеса на поверхность.
Недостатком всех указанных выше известных аналогов заявляемого способа является то, что при их осуществлении определение коэффициента сцепления колеса с поверхностью выполняется в состоянии начала проскальзывания измерительного колеса, когда близко к нулю значение коэффициента KCK скольжения, который, как известно, определяется выражением KCK=(1-ωИК/VИК), где
ωИК - угловая скорость измерительного колеса;
RИК - радиус измерительного колеса;
VИК - скорость движения измерительного колеса.
Вместе с тем, известно, что максимальное значение коэффициента сцепления колеса авиационного шасси с поверхностью, которое и необходимо определять в соответствии с требованиями Международной организации гражданской авиации (ИКАО) при контроле поверхностей аэродромных покрытий, обеспечивается при различных значениях коэффициента скольжения, зависящих от текущего состояния аэродромного покрытия. Так, например, максимальное значение коэффициента сцепления колеса с сухой поверхностью, с мокрой поверхностью и с обледеневшей поверхностью достигается при значениях коэффициента скольжения, равных 0,18-0,20, 0,13-0,17 и 0,07-0,12, соответственно. В связи с этим, ИКАО требует осуществлять контроль поверхностей аэродромных покрытий с целью определения максимального значения коэффициента сцепления колеса авиационного шасси с поверхностью при значениях коэффициента скольжения, соответствующих текущему состоянию взлетно-посадочной полосы.
Поэтому все указанные выше известные аналоги заявляемого способа не обеспечивают возможности определения именно максимального значения коэффициента сцепления колеса с поверхностью при значениях коэффициента скольжения, соответствующих текущему состоянию взлетно-посадочной полосы, что приводит к снижению точности его определения.
Кроме того, при осуществлении всех указанных выше известных аналогов заявляемого способа использование для вычисления коэффициента сцепления колеса с поверхностью известного значения силы нормальной нагрузки измерительного колеса на поверхность, которое было предварительно получено при стендовых испытаниях и поэтому может отличаться от текущего значения при непосредственном контроле поверхности, приводит к возникновению погрешности определения коэффициента сцепления, что также снижает точность его определения.
Наиболее близким по технической сущности к заявляемому способу определения коэффициента сцепления колеса с поверхностью является известный способ, который осуществлен в известном устройстве электромеханического измерения коэффициента сцепления колеса с поверхностью аэродромного покрытия (RU 2434093 C1, 2011). Указанный известный способ включает качение измерительного колеса по контролируемой поверхности, измерение силы нормальной нагрузки измерительного колеса на поверхность с помощью тензочувствительного датчика силы, прикладывание к оси измерительного колеса момента силы торможения с использованием нагруженного на активную нагрузку генератора постоянного тока, вал которого соединен с осью измерительного колеса, измерение угловой скорости вращения измерительного колеса датчиком угловой скорости, определение скорости движения измерительного колеса с использованием приемника глобальной спутниковой навигационной системы, определение текущего значения коэффициента скольжения на основании полученных значений угловой скорости вращения измерительного колеса и скорости его движения с учетом известного радиуса измерительного колеса, сравнение полученного значения коэффициента скольжения с заданным значением, изменение значения коэффициента скольжения для приближения его к заданному значению путем изменения величины тормозящего момента с помощью изменения активной нагрузки генератора, измерение силы сцепления измерительного колеса с поверхностью, обусловленной его трением о поверхность, с помощью тензочувствительного датчика силы и определение коэффициента сцепления измерительного колеса с поверхностью в виде отношения полученного значения силы сцепления измерительного колеса с поверхностью к полученному значению силы нормальной нагрузки измерительного колеса на поверхность.
Использование при осуществлении способа, являющегося ближайшим аналогом, измерения силы нормальной нагрузки измерительного колеса на поверхность с помощью тензочувствительного датчика силы позволяет определять текущее значение этой силы непосредственно в процессе контроля поверхности, что приводит к снижению погрешности определения коэффициента сцепления по сравнению с упомянутыми выше аналогами.
Благодаря использованию изменения значения коэффициента скольжения для приближения его к заданному значению способ, являющийся ближайшим аналогом, в отличие от упомянутых выше аналогов, обеспечивает возможность определения максимального значения коэффициента сцепления колеса с поверхностью при заданном значении коэффициента скольжения, соответствующего текущему состоянию взлетно-посадочной полосы, что приводит к повышению точности его определения.
Вместе с тем, наличие в устройстве, которое позволяет осуществить известный способ, являющийся ближайшим аналогом, механических элементов связи измерительного колеса с тензочувствительным датчиком силы сцепления и оси измерительного колеса с валом генератора постоянного тока, создающего момент силы торможения, не только усложняет конструкцию этого устройства и приводит к увеличению его габаритов и массы, но и вызывает возникновение погрешности определения коэффициента сцепления, которая обусловлена наличием люфтов и зазоров в этих механических элементах, зависящих при этом от условий и длительности их эксплуатации.
Кроме того, недостаточно высокая чувствительность тензочувствительного датчика силы, применяемого в ближайшем аналоге, и существенная зависимость ее от температуры также приводят к снижению точности определения коэффициента сцепления колеса с поверхностью.
Перечисленные недостатки свойственны всем перечисленным выше способам аналогичного назначения.
Известны устройства для осуществления рассмотренных выше способов определения коэффициента сцепления колеса с поверхностью аэродромного покрытия (RU 2298166 C1, 2007; RU 239003 C9, 2010), которые в общей для них части содержат измерительную тележку и блок регистрации. Измерительная тележка снабжена измерительным колесом, ведомыми колесами, генератором постоянного тока с блоком силовых ключей и активной нагрузкой, блокировочной муфтой, редуктором и муфтой свободного хода, соединяющими ось измерительного колеса с ротором генератора, два датчика угловой скорости и тензочувствительный датчик силы. Блок регистрации содержит вычислитель, пульт управления, блок управления, блок памяти, контроллер и дисплей.
Известно устройство для осуществления упомянутого выше способа определения коэффициента сцепления колеса с поверхностью аэродромного покрытия (RU 2393460 C1, 2010), которое содержит измерительное колесо с тензочувствительным датчиком крутящего момента, установленным на его диске, редуктор, генератор постоянного тока, который снабжен регулятором напряжения и ротор которого через редуктор и другой тензочувствительный датчик крутящего момента соединен с осью измерительного колеса, микроконтроллер, блок активной нагрузки, блок широтно-импульсной модуляции и блок памяти.
Известно устройство для осуществления упомянутого выше способа определения коэффициента сцепления колеса с поверхностью искусственного покрытия (RU 2442136 C1, 2012), которое содержит измерительное колесо, два тензочувствительных датчика крутящего момента, порошковый электромагнитный тормоз, микроконтроллер и силовой каскад.
Однако указанные выше известные аналоги заявляемого устройства, как было подробно рассмотрено при описании известных способов, которые они позволяют осуществить, не обеспечивают возможности определения максимального значения коэффициента сцепления колеса с поверхностью при значениях коэффициента скольжения, соответствующих текущему состоянию взлетно-посадочной полосы, что приводит к снижению точности его определения.
Кроме того, в указанных выше устройствах аналогичного назначения использование для вычисления коэффициента сцепления колеса с поверхностью известного значения силы нормальной нагрузки измерительного колеса на поверхность, которое было предварительно определено при стендовых испытаниях этих устройств и поэтому может отличаться от текущего значения при непосредственном контроле поверхности, приводит к возникновению погрешности определения коэффициента сцепления, что также снижает точность его определения.
Наиболее близким по технической сущности к заявляемому устройству для определения коэффициента сцепления колеса с поверхностью является известное устройство электромеханического измерения коэффициента сцепления колеса с поверхностью аэродромного покрытия (RU 2434093 C1, 2011). Указанный ближайший аналог содержит основание автотранспортного средства, платформу с осью вращения, балку подвески с осью вращения, измерительное колесо со ступицей измерительного колеса и валом, систему опускания-подъема и задания заданного давления на измерительное колесо, амортизатор, редуктор, раздвижной карданный вал, генератор с внешним возбуждением, тензочувствительный датчик давления, датчик угловой скорости, тензочувствительный датчик силы трения, каретку с валами ее перемещения, блок резисторов, блок управления генератором, приемник спутниковой навигационной системы, систему автоматического управления и пульт управления.
Применение в известном устройстве, являющемся ближайшим аналогом, тензочувствительного датчика давления для измерения силы нормальной нагрузки измерительного колеса на поверхность позволяет определять текущее значение этой силы непосредственно в процессе контроля поверхности, что приводит к снижению погрешности определения коэффициента сцепления по сравнению с упомянутыми выше аналогами.
Благодаря наличию в устройстве, являющемся ближайшим аналогом, приемника спутниковой навигационной системы, датчика угловой скорости, системы автоматического управления, блока управления генератором и генератора с внешним возбуждением возникает возможность изменения значения коэффициента скольжения измерительного колеса для приближения его к заданному значению, что, в отличие от упомянутых выше устройств аналогичного назначения, обеспечивает возможность определения максимального значения коэффициента сцепления колеса с поверхностью при заданном значении коэффициента скольжения, соответствующего текущему состоянию взлетно-посадочной полосы, что приводит к повышению точности его определения.
Вместе с тем, наличие в устройстве, являющемся ближайшим аналогом, таких механических узлов связи вала измерительного колеса с ротором генератора постоянного тока, как редуктор и раздвижной карданный вал, а также таких механических узлов связи измерительного колеса с тензочувствительным датчиком силы, как вал измерительного колеса, ступица, вал ступицы и каретка, установленная с возможностью перемещения по двум валам, не только усложняет конструкцию этого устройства и приводит к увеличению его габаритов и массы, но и вызывает возникновение погрешности определения коэффициента сцепления, которая обусловлена наличием люфтов и зазоров в этих механических элементах, зависящих при этом от условий и длительности их эксплуатации.
Кроме того, недостаточно высокая чувствительность тензочувствительных датчиков силы трения, которые могут применяться в ближайшем аналоге, и существенная зависимость ее от температуры также приводят к снижению точности определения коэффициента сцепления колеса с поверхностью.
Перечисленные недостатки свойственны всем перечисленным выше устройствам аналогичного назначения.
Задачей настоящей группы изобретений явилось создание способа определения коэффициента сцепления колеса с поверхностью и устройства для его осуществления, которые обеспечивают достижение технического результата, заключающегося в повышении точности определения коэффициента сцепления, в упрощении конструкции, в снижении габаритов и массы устройства, а также в расширении арсенала технических средств подобного назначения.
Поставленная задача решена, согласно настоящему изобретению, во-первых, тем, что способ определения коэффициента сцепления колеса с поверхностью, включающий, в соответствии с ближайшим аналогом, качение измерительного колеса транспортным средством по контролируемой поверхности, определение скорости движения измерительного колеса, измерение силы нормальной нагрузки измерительного колеса на поверхность, прикладывание к оси измерительного колеса момента силы торможения, измерение угловой скорости вращения измерительного колеса, определение текущего значения коэффициента скольжения на основании полученных значений угловой скорости вращения измерительного колеса и скорости его движения с учетом известного радиуса измерительного колеса, изменение величины тормозящего момента для приближения текущего значения коэффициента скольжения к заданному значению, определение силы сцепления измерительного колеса с поверхностью и определение коэффициента сцепления измерительного колеса с поверхностью в виде отношения полученного значения силы сцепления измерительного колеса с поверхностью к полученному значению силы нормальной нагрузки измерительного колеса на поверхность, отличается от ближайшего аналога тем, что момент силы торможения прикладывают к оси измерительного колеса с помощью индукционного электромагнитного тормоза, ротор которого соединен с осью измерительного колеса, а определение силы сцепления измерительного колеса с поверхностью осуществляют с использованием аналогового датчика Холла, установленного на статоре индукционного электромагнитного тормоза между его полюсами.
При этом определение скорости движения измерительного колеса осуществляют с использованием приемника глобальной спутниковой навигационной системы или на основании угловой скорости вращения ведомого колеса транспортного средства, полученной с использованием датчика угловой скорости.
Определение силы сцепления измерительного колеса с поверхностью осуществляют с использованием аналогового датчика Холла, установленного на статоре индукционного электромагнитного тормоза между его полюсами с расположением его чувствительной поверхности параллельно ротору тормоза.
Определение силы сцепления измерительного колеса с поверхностью осуществляют с использованием аналогового датчика Холла, установленного на статоре индукционного электромагнитного тормоза между его полюсами на одинаковом удалении от полюсов.
Использование в заявляемом способе для создания момента силы торможения индукционного электромагнитного тормоза, ротор которого непосредственно соединен с осью измерительного колеса, не требует применения механических узлов связи оси измерительного колеса с ротором индукционного электромагнитного тормоза, что, по сравнению с ближайшим аналогом, во-первых, упрощает конструкцию устройства и приводит к снижению его габаритов и массы, а во-вторых, обеспечивает уменьшение погрешности определения коэффициента сцепления, которая в ближайшем аналоге обусловлена наличием люфтов и зазоров в этих механических элементах связи, зависящих при этом от условий и длительности их эксплуатации.
Использование в заявляемом способе для создания момента силы торможения индукционного электромагнитного тормоза, момент силы торможения ротора которого прямо пропорционален квадрату магнитной индукции, дало возможность определять силу сцепления измерительного колеса с поверхностью с использованием аналогового датчика Холла, который установлен на статоре индукционного электромагнитного тормоза между его полюсами и выходной сигнал которого пропорционален значению магнитной индукции.
При этом использование для определения силы сцепления измерительного колеса с поверхностью аналогового датчика Холла, имеющего существенно меньшие габариты и массу по сравнению с тензочувствительным датчиком силы ближайшего аналога, не требует применения механических узлов связи измерительного колеса с датчиком силы, что, по сравнению с ближайшим аналогом, во-первых, упрощает конструкцию устройства для осуществления заявляемого способа и приводит к снижению его габаритов и массы, а во-вторых, обеспечивает уменьшение погрешности определения коэффициента сцепления, которая в ближайшем аналоге обусловлена наличием люфтов и зазоров в этих механических элементах связи, зависящих при этом от условий и длительности их эксплуатации.
Кроме того, аналоговые датчики Холла характеризуются высокой чувствительностью, достаточно стабильной в условиях изменения температуры, что также способствует повышению точности определения коэффициента сцепления колеса с поверхностью.
Поставленная задача решена, согласно настоящему изобретению, во-вторых, тем, что устройство для определения коэффициента сцепления колеса с поверхностью, содержащее, в соответствии с ближайшим аналогом, установленную на транспортном средстве раму, установленные на раме узел создания момента силы торможения, измерительное колесо, датчик силы давления, установленный с возможностью измерения вертикальной силы давления измерительного колеса на контролируемую поверхность, датчик угловой скорости измерительного колеса, элемент определения скорости транспортного средства, датчик силы сцепления измерительного колеса с контролируемой поверхностью, вычислительный блок, к входам которого подключены выходы датчика силы давления, датчика угловой скорости измерительного колеса, элемента для определения скорости транспортного средства и датчика силы сцепления, и блок управления, вход которого подключен к выходу вычислительного блока, а выход - к узлу создания момента силы торможения, отличается от ближайшего аналога тем, что узел создания момента силы торможения выполнен в виде индукционного электромагнитного тормоза, статор которого установлен на раме и на валу ротора которого установлено измерительное колесо, а датчик силы сцепления измерительного колеса с контролируемой поверхностью выполнен в виде аналогового датчика Холла, установленного на статоре индукционного электромагнитного тормоза между его полюсами.
При этом датчик силы давления выполнен в виде тензочувствительного элемента.
Датчик угловой скорости измерительного колеса выполнен в виде цифрового датчика Холла и установлен на раме с возможностью магнитного взаимодействия с ребрами крыльчатки воздушного охлаждения индукционного электромагнитного тормоза.
Элемент для определения скорости транспортного средства выполнен в виде приемника спутниковой навигационной системы или в виде цифрового датчика Холла, установленного на раме с возможностью магнитного взаимодействия с ребрами, выполненными на диске ведомого колеса транспортного средства.
Аналоговый датчик Холла установлен с расположением его чувствительной поверхности параллельно ротору тормоза.
Аналоговый датчик Холла установлен на одинаковом удалении от полюсов статора тормоза.
Статор индукционного электромагнитного тормоза установлен на раме посредством подвески, установленной на раме с возможностью поворота относительно горизонтальной оси с помощью привода опускания и подъема измерительного колеса.
Выполнение узла создания момента силы торможения заявляемого устройства в виде индукционного электромагнитного тормоза, статор которого установлен на раме и на валу ротора которого установлено измерительное колесо, не требует применения механических узлов связи оси измерительного колеса с ротором индукционного электромагнитного тормоза, что, по сравнению с ближайшим аналогом, во-первых, упрощает конструкцию заявляемого устройства и приводит к снижению его габаритов и массы, а во-вторых, обеспечивает уменьшение погрешности определения коэффициента сцепления, которая в ближайшем аналоге обусловлена наличием люфтов и зазоров в этих механических элементах связи, зависящих при этом от условий и длительности их эксплуатации.
Выполнение узла создания момента силы торможения заявляемого устройства в виде индукционного электромагнитного тормоза, момент силы торможения ротора которого прямо пропорционален квадрату магнитной индукции, дало возможность выполнить датчик силы сцепления измерительного колеса с контролируемой поверхностью в виде аналогового датчика Холла, который установлен на статоре индукционного электромагнитного тормоза между его полюсами и выходной сигнал которого пропорционален значению магнитной индукции.
При этом выполнение датчика силы сцепления измерительного колеса с контролируемой поверхностью в виде аналогового датчика Холла, имеющего существенно меньшие габариты и массу по сравнению с тензочувствительным датчиком силы ближайшего аналога, не требует применения механических узлов связи измерительного колеса с таким датчиком силы, что, по сравнению с ближайшим аналогом, во-первых, упрощает конструкцию устройства для осуществления заявляемого способа и приводит к снижению его габаритов и массы, а во-вторых, обеспечивает уменьшение погрешности определения коэффициента сцепления, которая в ближайшем аналоге обусловлена наличием люфтов и зазоров в этих механических элементах связи, зависящих при этом от условий и длительности их эксплуатации.
Кроме того, аналоговые датчики Холла характеризуются высокой чувствительностью, достаточно стабильной в условиях изменения температуры, что также способствует повышению точности определения коэффициента сцепления колеса с поверхностью.
Отмеченное свидетельствует о решении декларированной выше задачи настоящей группы изобретений и достижении сформулированного технического результата благодаря наличию у способа определения коэффициента сцепления колеса с поверхностью и устройства для его осуществления перечисленных выше отличительных признаков.
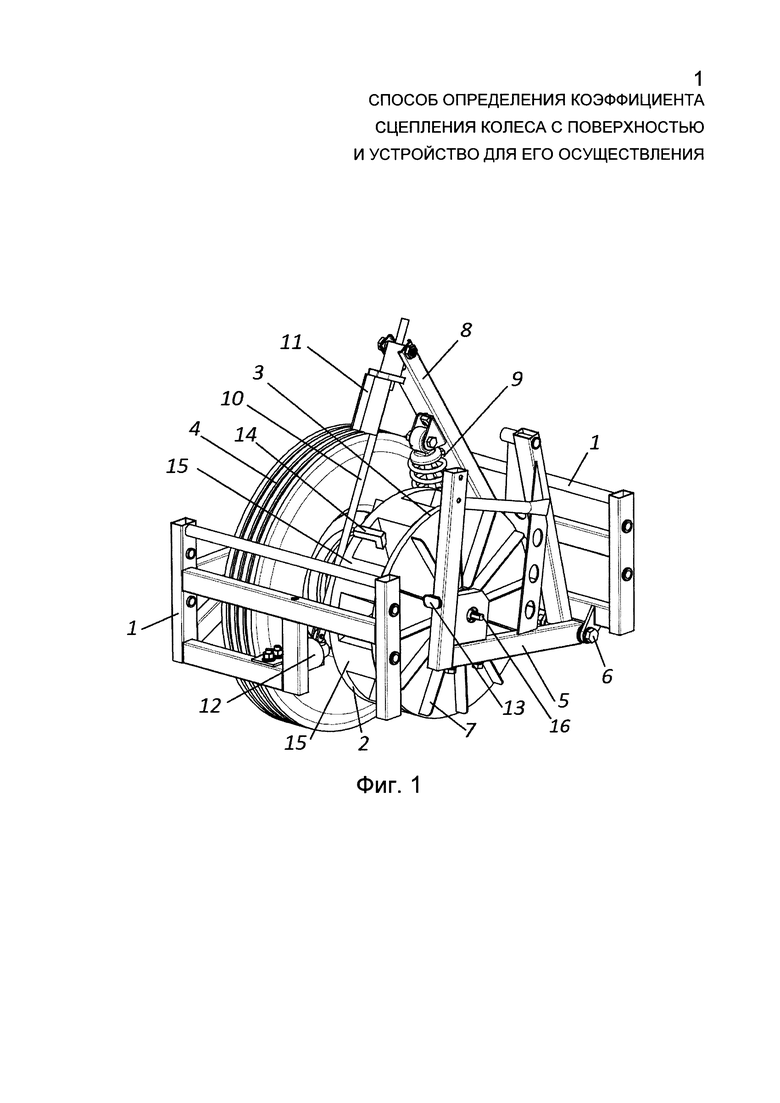
На фиг. 1 показан общий вид спереди и справа механических узлов заявляемого устройства для определения коэффициента сцепления колеса с поверхностью, позволяющего осуществить заявляемый способ определения коэффициента сцепления колеса с поверхностью, где 1 - рама, 2 - статор тормоза, 3 - ротор тормоза, 4 - измерительное колесо, 5 - подвеска, 6 - ось подвески, 7 - ребро крыльчатки, 8 - рычаг привода, 9 - амортизатор, 10 - вал с резьбой, 11 - двигатель подъема и опускания, 12 - датчик силы давления, 13 - датчик угловой скорости, 14 - датчик силы сцепления, 15 - полюс статора и 16 - вал ротора.
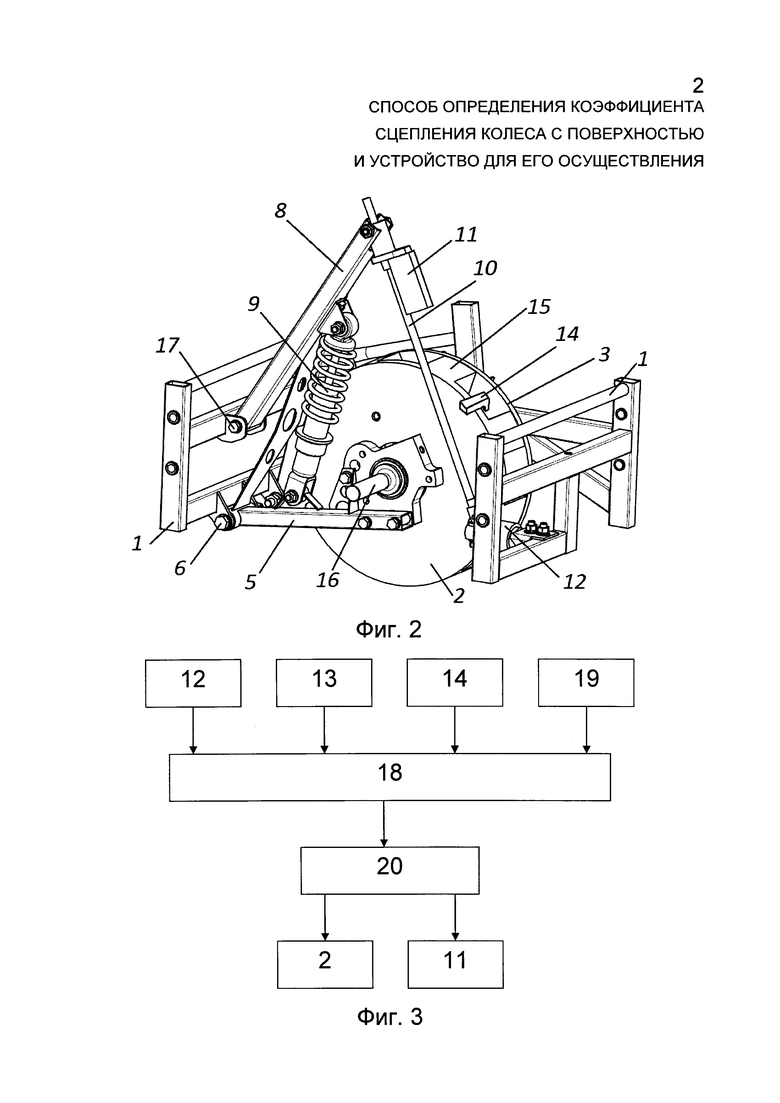
На фиг. 2 показан общий вид спереди и слева механических узлов заявляемого устройства для определения коэффициента сцепления колеса с поверхностью, позволяющего осуществить заявляемый способ определения коэффициента сцепления колеса с поверхностью, на котором измерительное колесо 4 не показано, где 17 - ось рычага.
На фиг. 3 показана структурная схема электрических и электронных узлов заявляемого устройства для определения коэффициента сцепления колеса с поверхностью, позволяющего осуществить заявляемый способ определения коэффициента сцепления колеса с поверхностью, где 18 - вычислительный блок, 19 - элемент определения скорости транспортного средства и 20 - блок управления.
Устройство для определения коэффициента сцепления колеса с поверхностью, позволяющее осуществить заявляемый способ определения коэффициента сцепления колеса с поверхностью, содержит (см. фиг. 1 и 2) установленную на транспортном средстве металлическую раму 1 и узел создания момента силы торможения в виде индукционного электромагнитного тормоза, содержащего статор 2 тормоза и ротор 3 тормоза. Статор 2 тормоза установлен на раме 1 посредством подвески 5, выполненной в виде рычага и установленной на раме 1 с возможностью поворота относительно горизонтальной оси 6 подвески. Статор 2 тормоза содержит концентрически расположенные соленоиды с сердечниками, наружные торцы которых являются полюсами 15 статора. Ротор 3 тормоза выполнен в виде диска из электропроводящего материала и коаксиально установлен на статоре 2 тормоза с помощью вала 16 ротора с возможностью вращения в подшипнике. На наружной поверхности ротора 3 тормоза выполнена крыльчатка воздушного охлаждения в виде радиально расположенных ребер 7 крыльчатки из магнитопроводящего материала.
Устройство также содержит измерительное колесо 4, которое установлено на валу 16 ротора с противоположной стороны статора 2 тормоза и поэтому имеет возможность вращения вместе с ротором 3 тормоза относительно статора 2 тормоза.
Устройство снабжено приводом опускания и подъема измерительного колеса 4, который содержит рычаг 8 привода, установленный на раме 1 с возможностью вращения относительно горизонтальной оси 17 рычага и находящийся во взаимодействии с подвеской 5 через амортизатор 9 для обеспечения создания заданной вертикальной силы давления измерительного колеса 4 на контролируемую поверхность. Привод опускания и подъема измерительного колеса 4 также содержит вал 10 с резьбой, один конец которого шарнирно прикреплен к тензочувствительному датчику 12 силы давления, установленному на раме 1. В качестве датчика 12 силы давления использован, например, датчик типа Model №355, производство фирмы Vishay, Tedea-Huntleigh. Второй конец вала 10 с резьбой пропущен через шарнирно установленную на конце рычага 8 привода полую втулку, на которой установлен электрический двигатель 11 подъема и опускания. На вал 10 с резьбой навинчена гайка, находящаяся во взаимодействии с ротором двигателя 11 подъема и опускания для обеспечения возможности ее вращения. В качестве двигателя 11 подъема и опускания, вала 10 с резьбой и гайки использована, например, единая конструкция актуатора типа MGH 100/50, производство фирмы Т.Е.А. Technische Antriebselemente GmbH.
Устройство снабжено датчиком 13 угловой скорости измерительного колеса 4, который выполнен в виде цифрового датчика Холла и установлен на раме 1 с возможностью магнитного взаимодействия с ребрами 7 крыльчатки воздушного охлаждения индукционного электромагнитного тормоза. В качестве датчика 13 угловой скорости использован, например, цифровой датчик Холла типа SS41, производство фирмы Honeywell.
Устройство снабжено датчиком 14 силы сцепления измерительного колеса 4 с контролируемой поверхностью, который выполнен в виде аналогового датчика Холла и установлен на статоре индукционного электромагнитного тормоза между его соседними полюсами. При наилучшем осуществлении изобретения датчик 14 силы сцепления установлен на одинаковом удалении от соседних полюсов 15 статора с расположением его чувствительной поверхности параллельно ротору 3 тормоза. В качестве датчика 14 силы сцепления использован, например, аналоговый датчик Холла типа SS49, производство фирмы Honeywell.
Устройство снабжено (см. фиг. 3) элементом 19 определения скорости транспортного средства (на фиг. 1 и 2 не показан), который выполнен либо в виде приемника спутниковой навигационной системы, либо в виде цифрового датчика Холла, аналогичного используемому в качестве датчика 13 угловой скорости измерительного колеса 4 и установленного с возможностью магнитного взаимодействия с ребрами, выполненными на диске ведомого колеса транспортного средства.
Устройство содержит вычислительный блок 18, который выполнен на основе микропроцессора, например, типа СРС10703, производство фирмы Fastwel, и снабжен встроенными аналого-цифровыми преобразователями, цифро-аналоговыми преобразователями, интерфейсами ввода-вывода, а также постоянным и оперативным запоминающими устройствами. К входам вычислительного блока 18 подключены выходы элемента 19 определения скорости транспортного средства, датчика 14 силы сцепления, датчика 13 угловой скорости и датчика 12 силы давления.
Устройство снабжено блоком 20 управления, который выполнен на основе электронных линейных регуляторов LM1085, производство фирмы Texas Instruments, и силовых транзисторов типа IRF530, производство фирмы International Rectifier. Вход блока 20 управления подключен к выходу вычислительного блока 18, а два выхода - к обмоткам соленоидов статора 2 тормоза и к двигателю 11 подъема и опускания, соответственно.
Устройство для определения коэффициента сцепления колеса с поверхностью, позволяющее осуществить заявляемый способ определения коэффициента сцепления колеса с поверхностью, работает следующим образом.
Транспортное средство, на котором установлено устройство для определения коэффициента сцепления колеса с поверхностью, двигается по контролируемой поверхности аэродромного или дорожного покрытия.
По сигналу с вычислительного блока 18 блок 20 управления включает двигатель 11 подъема и опускания, который вращает гайку, навинченную на вал 10 с резьбой, перемещая ее вниз (см. фиг. 1 и 2). В результате этого рычаг 8 привода поворачивается на оси 17 рычага и через амортизатор 9 воздействует на подвеску 5, которая также поворачивается на оси 6 подвески, обеспечивая опускание статора 2 тормоза с ротором 3 тормоза и измерительным колесом 4 до соприкосновения измерительного колеса 4 с контролируемой поверхностью. При этом датчик 12 силы давления формирует аналоговый электрический сигнал, который пропорционален силе воздействия рамы 1 через вал 10 с резьбой, рычаг 8 привода, амортизатор 9 и подвеску 5 на измерительное колесо 4 и, следовательно, силе давления измерительного колеса 4 на контролируемую поверхность. Указанный электрический сигнал с датчика 12 силы давления поступает в вычислительный блок 18, где после преобразования в цифровой код сравнивается с заданным значением. При равенстве цифрового кода и его заданного значения вычислительный блок 18 через блок 20 управления выключает двигатель 11 подъема и опускания, поскольку сила давления измерительного колеса 4 на контролируемую поверхность достигла заданного значения.
Трение измерительного колеса 4 о контролируемую поверхность приводит его во вращение на валу 16 ротора вместе с ротором 3 тормоза.
При синхронном вращении измерительного колеса 4 и ротора 3 тормоза в результате магнитного взаимодействия последовательно с каждым ребром 7 крыльчатки воздушного охлаждения индукционного электромагнитного тормоза датчик 13 угловой скорости формирует электрические импульсы, которые поступают в вычислительный блок 18, преобразующий временные интервалы между этими электрическими импульсами в цифровые коды и вычисляющий их среднее значение Т за один оборот ротора 3 тормоза.
Одновременно с элемента 19 определения скорости транспортного средства сигнал, соответствующий скорости движения транспортного средства и, следовательно, скорости движения измерительного колеса 4, поступает в вычислительный блок 18, который преобразует его в цифровой код. Вычислительный блок 18 вычисляет текущее значение KCK коэффициента скольжения на основании выражения KCK=1-2πRИК/(NTVИК), где
RИК - известный радиус измерительного колеса 4, который был предварительно определен при калибровке устройства в процессе движения измерительного колеса 4 без проскальзывания;
N - количество ребер 7 крыльчатки воздушного охлаждения;
Т - среднее значение временных интервалов между электрическими импульсами;
VИК - скорость движения измерительного колеса 4.
Затем вычислительный блок 18 сравнивает полученное значение КСК коэффициента скольжения с заданным значением, при котором обеспечивается максимальное значение коэффициента сцепления колеса с поверхностью в условиях ее текущего состояния.
Пока индукционный электромагнитный тормоз не создает момента силы торможения, измерительное колесо 4 движется по контролируемой поверхности без проскальзывания, и текущее значение KCK коэффициента скольжения равно нулю. Поэтому при сравнении текущее значение KCK коэффициента скольжения окажется меньше заданного значения. В этом случае по сигналу с вычислительного блока 18 блок управления 20 подает напряжение на обмотки соленоидов статора 2 тормоза, через которые начинает протекать электрический ток. Протекающий через обмотки соленоидов статора 2 тормоза ток создает магнитное поле, которое индуцирует в роторе 3 тормоза, вращающемся в этом магнитном поле, вихревые токи Фуко, создающие магнитное поле, препятствующее вращению ротора 3 тормоза и, следовательно, вращению измерительного колеса 4. В результате этого измерительное колесо 4 начинает проскальзывать по контролируемой поверхности.
По сигналам, сформированным вычислительным блоком 18 на основании непрерывного сравнения текущего значения KCK коэффициента скольжения с заданным значением, блок 20 управления увеличивает напряжение, подаваемое на обмотки соленоидов статора 2 тормоза и приводящее к увеличению момента силы торможения измерительного колеса 4, до тех пор, пока текущее значение KCK коэффициента скольжения не сравняется с его заданным значением. Далее по сигналам, сформированным вычислительным блоком 18 на основании сравнения текущего значения KCK коэффициента скольжения с заданным значением, блок 20 управления непрерывно изменяет напряжение, подаваемое на обмотки соленоидов статора 2 тормоза, обеспечивая создание момента силы торможения измерительного колеса 4, при котором текущее значение KCK коэффициента скольжения близко к заданному значению.
После этого аналоговый электрический сигнал, пропорциональный магнитной индукции магнитного поля, создаваемого статором 2 тормоза, и поступающий с датчика 14 силы сцепления в вычислительный блок 18, преобразуется последним в цифровой код. Поскольку момент силы торможения, создаваемой электромагнитным тормозом, пропорционален квадрату значения магнитной индукции, на этапе стендовой калибровки устройства была получена и занесена в постоянное запоминающее устройство вычислительного блока 18 градуировочная зависимость между значениями электрического сигнала, формируемого датчиком 14 силы сцепления, и силой сцепления измерительного колеса 4 с поверхностью. С использованием этой зависимости вычислительный блок 18 на основании значения электрического сигнала, полученного с датчика 14 силы сцепления, определяет текущее значение силы сцепления измерительного колеса 4 с контролируемой поверхностью, а затем текущее значение коэффициента сцепления измерительного колеса 4 с контролируемой поверхностью в виде отношения текущего значения силы сцепления измерительного колеса 4 с контролируемой поверхностью к текущему значению силы давления измерительного колеса 4 на контролируемую поверхность, полученному с датчика 12 силы давления.
По окончании контроля поверхности аэродромного или дорожного покрытия по сигналу с вычислительного блока 18 блок 20 управления включает двигатель 11 подъема и опускания, который вращает гайку, навинченную на вал 10 с резьбой, в противоположном направлении, перемещая ее вверх (см. фиг. 1 и 2). В результате этого рычаг 8 привода поворачивается на оси 17 рычага и через амортизатор 9 поднимает подвеску 5, поворачивая ее на оси 6 подвески и обеспечивая подъем статора 2 тормоза с ротором 3 тормоза и измерительным колесом 4.
Таким образом, группа изобретений обеспечивает повышение точности определения коэффициента сцепления, упрощение конструкции, снижение габаритов и массы устройства, а также расширение арсенала технических средств подобного назначения.
Группа изобретений относится к области измерительной техники и преимущественно может быть использована для определения фрикционных параметров поверхности взлетно-посадочных полос аэродромов или дорожных покрытий. Способ включает качение измерительного колеса транспортным средством по контролируемой поверхности, определение скорости движения измерительного колеса, измерение силы нормальной нагрузки измерительного колеса на поверхность, прикладывание к оси измерительного колеса момента силы торможения с помощью индукционного электромагнитного тормоза, ротор которого соединен с осью измерительного колеса, измерение угловой скорости вращения измерительного колеса, определение коэффициента скольжения на основании угловой скорости вращения измерительного колеса и скорости его движения с учетом его радиуса, изменение тормозящего момента для приближения текущего значения коэффициента скольжения к заданному значению, определение силы сцепления измерительного колеса с поверхностью с использованием аналогового датчика Холла, установленного на статоре индукционного электромагнитного тормоза между его полюсами, и определение коэффициента сцепления измерительного колеса с поверхностью в виде отношения силы сцепления измерительного колеса с поверхностью к силе нормальной нагрузки измерительного колеса на поверхность. Устройство содержит установленную на транспортном средстве раму, индукционный электромагнитный тормоз, статор которого установлен на раме, измерительное колесо, установленное на валу ротора тормоза, датчик силы давления, установленный с возможностью измерения вертикальной силы давления измерительного колеса на контролируемую поверхность, датчик угловой скорости измерительного колеса, элемент определения скорости транспортного средства, датчик силы сцепления измерительного колеса с контролируемой поверхностью в виде аналогового датчика Холла, установленного на статоре тормоза между его полюсами, вычислительный блок и блок управления. Техническим результатом является повышение точности определения коэффициента сцепления, упрощение конструкции, снижение габаритов и массы устройства, а также расширение арсенала технических средств подобного назначения. 2 н. и 11 з.п. ф-лы, 3 ил.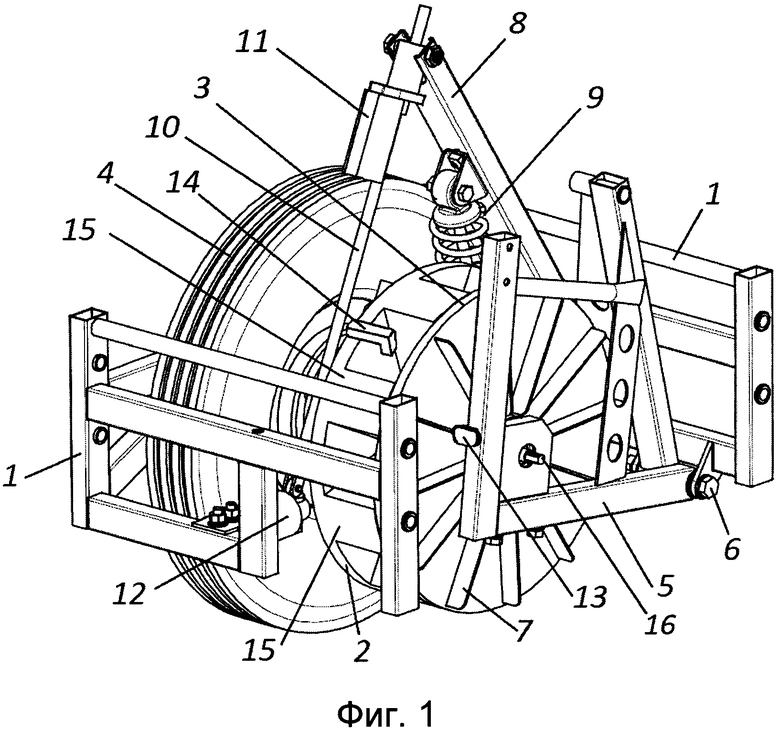
1. Способ определения коэффициента сцепления колеса с поверхностью, включающий качение измерительного колеса транспортным средством по контролируемой поверхности, определение скорости движения измерительного колеса, измерение силы нормальной нагрузки измерительного колеса на поверхность, прикладывание к оси измерительного колеса момента силы торможения, измерение угловой скорости вращения измерительного колеса, определение текущего значения коэффициента скольжения на основании полученных значений угловой скорости вращения измерительного колеса и скорости его движения с учетом известного радиуса измерительного колеса, изменение величины тормозящего момента для приближения текущего значения коэффициента скольжения к заданному значению, определение силы сцепления измерительного колеса с поверхностью и определение коэффициента сцепления измерительного колеса с поверхностью в виде отношения полученного значения силы сцепления измерительного колеса с поверхностью к полученному значению силы нормальной нагрузки измерительного колеса на поверхность, отличающийся тем, что момент силы торможения прикладывают к оси измерительного колеса с помощью индукционного электромагнитного тормоза, ротор которого соединен с осью измерительного колеса, а определение силы сцепления измерительного колеса с поверхностью осуществляют с использованием аналогового датчика Холла, установленного на статоре индукционного электромагнитного тормоза между его полюсами.
2. Способ по п. 1, отличающийся тем, что определение скорости движения измерительного колеса осуществляют с использованием приемника глобальной спутниковой навигационной системы.
3. Способ по п. 1, отличающийся тем, что определение скорости движения измерительного колеса осуществляют на основании угловой скорости вращения ведомого колеса транспортного средства, полученной с использованием датчика угловой скорости.
4. Способ по п. 1, отличающийся тем, что определение силы сцепления измерительного колеса с поверхностью осуществляют с использованием аналогового датчика Холла, установленного на статоре индукционного электромагнитного тормоза между его полюсами с расположением его чувствительной поверхности параллельно ротору тормоза.
5. Способ по п. 1, отличающийся тем, что определение силы сцепления измерительного колеса с поверхностью осуществляют с использованием аналогового датчика Холла, установленного на статоре индукционного электромагнитного тормоза между его полюсами на одинаковом удалении от полюсов.
6. Устройство для определения коэффициента сцепления колеса с поверхностью, содержащее установленную на транспортном средстве раму, установленные на раме узел создания момента силы торможения, измерительное колесо, датчик силы давления, установленный с возможностью измерения вертикальной силы давления измерительного колеса на контролируемую поверхность, датчик угловой скорости измерительного колеса, элемент определения скорости транспортного средства, датчик силы сцепления измерительного колеса с контролируемой поверхностью, вычислительный блок, к входам которого подключены выходы датчика силы давления, датчика угловой скорости измерительного колеса, элемента определения скорости транспортного средства и датчика силы сцепления, и блок управления, вход которого подключен к выходу вычислительного блока, а выход - к узлу создания момента силы торможения, отличающееся тем, что узел создания момента силы торможения выполнен в виде индукционного электромагнитного тормоза, статор которого установлен на раме и на валу ротора которого установлено измерительное колесо, а датчик силы сцепления измерительного колеса с контролируемой поверхностью выполнен в виде аналогового датчика Холла, установленного на статоре индукционного электромагнитного тормоза между его полюсами.
7. Устройство по п. 6, отличающееся тем, что датчик силы давления выполнен в виде тензочувствительного элемента.
8. Устройство по п. 6, отличающееся тем, что датчик угловой скорости измерительного колеса выполнен в виде цифрового датчика Холла и установлен на раме с возможностью магнитного взаимодействия с ребрами крыльчатки воздушного охлаждения индукционного электромагнитного тормоза.
9. Устройство по п. 6, отличающееся тем, что элемент определения скорости транспортного средства выполнен в виде приемника спутниковой навигационной системы.
10. Устройство по п. 6, отличающееся тем, что элемент определения скорости транспортного средства выполнен в виде цифрового датчика Холла и установлен на раме с возможностью магнитного взаимодействия с ребрами, выполненными на диске ведомого колеса транспортного средства.
11. Устройство по п. 6, отличающееся тем, что аналоговый датчик Холла установлен с расположением его чувствительной поверхности параллельно ротору тормоза.
12. Устройство по п. 6, отличающееся тем, что аналоговый датчик Холла установлен на одинаковом удалении от полюсов статора тормоза.
13. Устройство по п. 6, отличающееся тем, что статор индукционного электромагнитного тормоза установлен на раме посредством подвески, установленной на раме с возможностью поворота относительно горизонтальной оси с помощью привода опускания и подъема измерительного колеса.
| УСТРОЙСТВО ЭЛЕКТРОМЕХАНИЧЕСКОГО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНОГО ПОКРЫТИЯ | 2010 |
|
RU2434093C1 |
| Приспособление для подачи коробок в машинах для наполнения коробок | 1925 |
|
SU851A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С АЭРОДРОМНЫМ ПОКРЫТИЕМ | 2006 |
|
RU2304765C1 |
| US 4098111 A, 04.07.1978. | |||

