Изобретение относится к автоматическому управлению курсовым положением самолета при его разбеге-пробеге по взлетно-посадочной полосе (ВПП) на режимах взлета-посадки.
Известна система автоматического управления угловым положением летательного аппарата. Известная система содержит задатчик требуемого курса и датчик текущего значения курса, подключенные к устройству формирования команд управления, воздействующему на сервопривод (исполнительный механизм), управляющий аэродинамическим рулем направления.
Недостатком известной системы является низкая эффективность удержания самолета на курсе на режимах влета-посадки, поскольку его скорость на этих режимах недостаточная для эффективной работы рулевых аэродинамических поверхностей.
Целью изобретения является повышение эффективности курсового управления самолетом на режимах взлета-посадки, когда колесное шасси самолета находится в контакте с покрытием взлетно-посадочной полосы.
Это достигается тем, что в системе автоматического управления угловым положением самолета, содержащей задатчик курсового угла и датчик текущего значения курсового угла, подключенные к устройству формирования команд управления, воздействующему на исполнительные механизмы, в режимах разбега-пробега по взлетно-посадочной полосе исполнительными механизмами служат электродвигатели, воздействующие на колеса шасси самолета.
Система может быть снабжена двумя высотомерами, установленными против шасси соответственно правого и левого бортов и подключенными к устройству формирования команд.
На чертеже показана принципиальная структурная схема предложенной системы.
Система содержит задатчик 1 курсового угла и датчик 2 текущего курсового угла, подключенные к устройству 3 формирования команд управления. Выход устройства 3 подключен к исполнительным механизмам 4 и 5, которыми являются электродвигатели, встроенные в колесное шасси соответственно левого и правого бортов самолета. Система содержит также два радиовысотомера 6 и 7, установленных на самолете каждый против шасси соответствующего борта и подключенные к устройству 3, к которому также подключен датчик 8 путевой скорости.
Система работает следующим образом.
Перед началом взлета или посадки на задатчике 1 выставляется заданный курс, а непосредственно на взлете-посадке в устройстве 3 сравниваются сигналы датчика 2 и задатчика 1 и по результатам сравнения формируются соответствующие команды, подаваемые на электродвигатели 4 или 5, с уменьшением или увеличением числа оборотов которых соответственно изменяется направление движения самолета по ВПП. Для предупреждения "рыскания" самолета каждый радиовысотомер 6 и 7 измеряет на пути движения своего шасси расстояние от покрытия ВПП до поперечной строительной оси самолета, поскольку при движении колес по неровностям ВПП колеса левого и правого бортов с очевидностью могут проходить путь разной длины, что будет вызывать изменение курсового положения самолета. Таким образом, при отсутствии высотомеров система будет только исправлять уже возникшие погрешности курса, т.е. самолет будет "рыскать", в то время как с высотомерами эти погрешности будут предупреждаться, поскольку высотомеры контролируют не пройденный путь, а тот, который колесу еще предстоит пройти.
Результаты показаний высотомеров 6 и 7 обрабатываются в устройстве 3, которое выдает соответствующие команды на электродвигатели. С учетом указанных обстоятельств эти команды будут опережающими, соответствующими не только динамическим характеристикам электродвигателей, но и скорости движения самолета, для чего к устройству 3 подключен датчик 8 путевой скорости, сигналы которого входят в число исходных данных, обрабатываемых устройством 3 при формировании команд управления.
Особенностью предложенного устройства является то, что встроенные в колесное шасси электродвигатели 4 и 5 являются маломощными и не в состоянии развернуть тяжелую машину. Назначение колесных двигателей - придать колесу соответствующего борта требуемую скорость вращения. Например, если колеса различных бортов катятся по поверхностям различной плотности: одно - по твердому покрытию ВПП, а другое - по мягкому грунту, то сопротивление качению для второго колеса будет значительно выше, скорость его вращения будет падать и самолет будет разворачиваться по курсу. В этом случае требуется уравнять скорости вращения колес обоих бортов.
Второй случай, когда колеса обоих бортов катятся по покрытию одинаковой плотности (твердости) и, испытывая одинаковое сопротивление качению, имеют одинаковую скорость вращения, но проходят различный путь, если одно колесо попадает на возвышение или впадину (у колес различных бортов различный рельеф пути). Очевидно, что и в этом случае самолет будет разворачиваться по курсу. Чтобы предотвратить этот разворот, требуется увеличить скорость вращения того колеса, которое проходит больший путь.
Изобретение относится к авиации и может быть использовано в системах управления самолетами при его пробеге-разбеге по взлетно-посадочной полосе. В системе автоматического управления задатчик 1 курсового угла и датчик 2 текущего значения курсового угла подключены к устройству 3 формирования команд управления, воздействующему на исполнительные механизмы 4, 5. Исполнительными механизмами служат электродвигатели, воздействующие на колеса шасси самолета. Система может быть снабжена двумя высотомерами 6 и 7, которые устанавливаются против шасси правого и левого бортов. Высотомеры 6 и 7 подключены к устройству 3 формирования команд. Изобретение позволяет повысить эффективность курсового управления самолетом на режимах взлета-посадки. 1 з.п.ф-лы, 1 ил.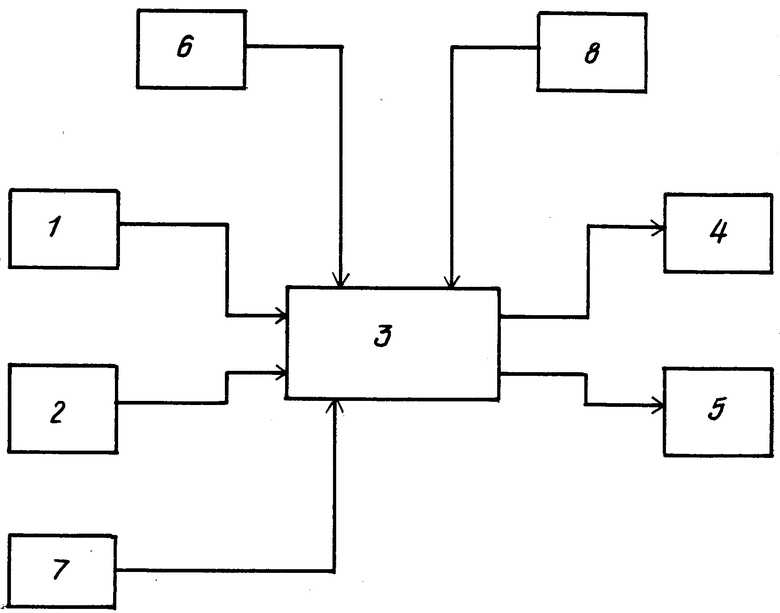
| Система автоматического управления угловым положением летательного аппарата | 1971 |
|
SU391537A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
