Изобретение относится к радиолокационным системам, в частности к помехозащищенным следящим радиолокационным измерителям дальности.
Создание уводящих радиопомех следящим радиолокационным измерителям (РЛИ) дальности в режиме автоматического сопровождения цели может привести к срыву автосопровождения по дальности или перевести следящие РЛИ дальности в режим сопровождения ложной цели. Существуют различные устройства защиты от уводящих по дальности помех, позволяющие построить помехозащищенные следящие РЛИ дальности [1] .
Известен следящий РЛИ дальности с бланкированием соседнего канала [2] , обеспечивающий защиту от уводящей помехи в сторону большей дальности. При создании уводящей помехи в сторону меньшей дальности функционирование данного РЛИ дальности нарушается. Известен следящий РЛИ дальности с сопровождением по переднему фронту (срезу) импульса цели [1] . В этом измерителе требуется более широкая полоса пропускания радиоприемного устройства, чем при обычном сопровождении импульса цели, и поэтому названный измеритель в большей степени подвержен воздействию шумовых помех. Кроме того, для определения той части импульса, по которой будет вестись сопровождение, необходимо иметь анализатор вида помехи, определяющий направление увода, что усложняет устройство измерителя.
Из известных технических решений наиболее близким аналогом (прототипом) является следящий РЛИ дальности, использующий для защиты от уводящих помех дополнительные каналы приема по дальности, расположенные симметрично на меньшей и большей дистанции относительно следящего канала, называемые сторожевыми каналами [1] .
Он содержит временной дискриминатор, два сторожевых канала приема сигналов цели, обнаружитель сигнала цели, обнаружитель уводящей помехи, первый и второй обнаружители сигналов первого и второго сторожевых каналов, фильтр основного канала, экстраполятор дальности до цели, логическое устройство, устройство расстановки стробов, коммутатор.
Принцип функционирования этого измерителя состоит в следующем. При отсутствии уводящей помехи следящий РЛИ дальности сопровождает сигнал цели по дальности. При включении мощной уводящей помехи происходит обнаружение помехи, экстраполяция или запоминание дальности до цели и переход следящей системы РЛИ дальности на сопровождение уводящей помехи. С течением времени сигнал, отраженный от цели, и уводящая помеха начинают расходиться по дальности, и в какой-то момент времени сигнал цели появляется в одном из сторожевых каналов (первом или втором) в зависимости от стороны увода. Выходной сигнал в сторожевом канале обнаруживается обнаружителем сигнала цели. Последний воздействует на логическое устройство, которое производит перестройку следящей системы РЛИ дальности на экстраполированное или запомненное значение дальности до цели.
Однако данный РЛИ дальности имеет два существенных недостатка. Во-первых, наряду с простейшей односторонней уводящей помехой, имитирующей движение цели в сторону увеличения или уменьшения дальности, возможно создание более сложных видов уводящих помех, например двухсторонних, реализуемых путем излучения станцией помех одновременно двух односторонних уводящих помеховых сигналов с функционально связанными законами изменения их временных задержек в противоположные стороны относительно сигнала истинной цели. Такая же ситуация имеет место тогда, когда станции помех, размещенные на двух достаточно близко расположенных целях, одна из которых является истинной целью для следящего РЛИ дальности, взаимодействуя в рамках групповой защиты, формируют противоположно направленные уводящие по дальности помехи. В указанных случаях одна из помех обеспечивает увод следящего канала, а вторая помеха при появлении в сторожевом канале вызывает ложное срабатывание логического устройства и, тем самым, перевод следящего канала на сопровождение второй уводящей помехи. Во-вторых, в момент создания уводящей помехи цель может начать энергичный маневр с тем, чтобы затруднить повторный захват сигнала цели после ее обнаружения в сторожевом канале. Объясняется это тем, что возврат следящей системы основного канала происходит на экстраполированное или запомненное значение дальности до цели, которое не соответствует дальности до маневрирующей цели. В результате сигнал цели может оказаться на нелинейном участке дискриминационной характеристики следящей системы, что, как правило, приводит к срыву слежения.
Заявленное изобретение направлено на решение задачи защиты следящего РЛИ дальности от уводящих помех, как односторонних, так и двухсторонних.
Техническим результатом изобретения является обеспечение помехозащищенности следящего радиолокационного измерителя дальности в сложной помехово-целевой обстановке.
Заявленный технический результат обеспечивается тем, что следящий радиолокационный измеритель дальности содержит трехканальный временной дискриминатор, первый вход которого соединен с выходом приемного устройства радиолокационной станции, а его первый выход соединен с первыми входами фильтра основного канала, первого и второго формирователей относительной дальности до цели, второй выход трехканального временного дискриминатора соединен со вторым входом первого формирователя относительной дальности до цели, его третий выход соединен со вторым входом второго формирователя относительной дальности до цели, четвертый выход соединен со входами обнаружителя уводящей помехи и обнаружителя сигнала цели, пятый выход трехканального временного дискриминатора соединен со входом первого обнаружителя сигнала первого сторожевого канала, а шестой выход соединен со входом второго обнаружителя сигнала второго сторожевого канала, первый выход обнаружителя уводящей помехи соединен с первым входом коммутатора и с первыми входами первого и второго экстраполяторов дальности до цели и ее производных, а его второй выход соединен с первыми входами первого и второго анализаторов оценок дальности до цели и ее производных, выход обнаружителя сигнала цели соединен с первым входом логического устройства, которое в зависимости от вида выходных сигналов первого и второго анализаторов оценок дальности до цели и ее производных выдает оценку дальности до цели и ее производных, первый выход упомянутого первого обнаружителя соединен со вторым входом упомянутого первого анализатора, а второй выход упомянутого первого обнаружителя соединен с третьим входом указанного первого анализатора, первый выход упомянутого второго обнаружителя соединен со вторым входом упомянутого второго анализатора, а второй выход упомянутого второго обнаружителя соединен с третьим входом упомянутого второго анализатора, выход упомянутого первого формирователя относительной дальности до цели соединен со входом первого фильтра, выход второго формирователя относительной дальности до цели соединен со входом второго фильтра, первый выход фильтра основного канала соединен со вторыми входами упомянутых первого и второго экстраполяторов, с первыми входами упомянутых первого и второго компенсаторов, осуществляющих вычитание оценок дальности и ее производных, поступающих с фильтра основного канала, и оценок относительной дальности до цели и ее производных, и вторым входом упомянутого коммутатора, а второй выход фильтра основного канала соединен со вторым входом упомянутого логического устройства, выход первого фильтра соединен со вторым входом упомянутого первого компенсатора, выход второго фильтра соединен со вторым входом упомянутого второго компенсатоpa, выход упомянутого первого экстраполятора соединен с третьим входом упомянутого коммутатора, первый и второй выходы упомянутого второго экстраполятора соединены соответственно с четвертыми входами упомянутых первого и второго анализаторов, выход упомянутого первого компенсатора соединен с пятыми входами упомянутого первого анализатора и упомянутого логического устройства, выход упомянутого второго компенсатора соединен с пятым входом упомянутого второго анализатора и с третьим входом упомянутого логического устройства, выход первого упомянутого анализатора соединен с четвертым входом упомянутого логического устройства, выход второго упомянутого анализатора соединен с шестым входом упомянутого логического устройства, первый выход упомянутого логического устройства соединен со входом устройства расстановки стробов, а второй выход упомянутого логического устройства соединен со вторым входом фильтра основного канала, выход устройства расстановки стробов соединен со вторым входом трехканального временного дискриминатора, выход упомянутого коммутатора подсоединен к потребителю.
На фиг. 1 показана дискриминационная характеристика трехканального временного дискриминатора.
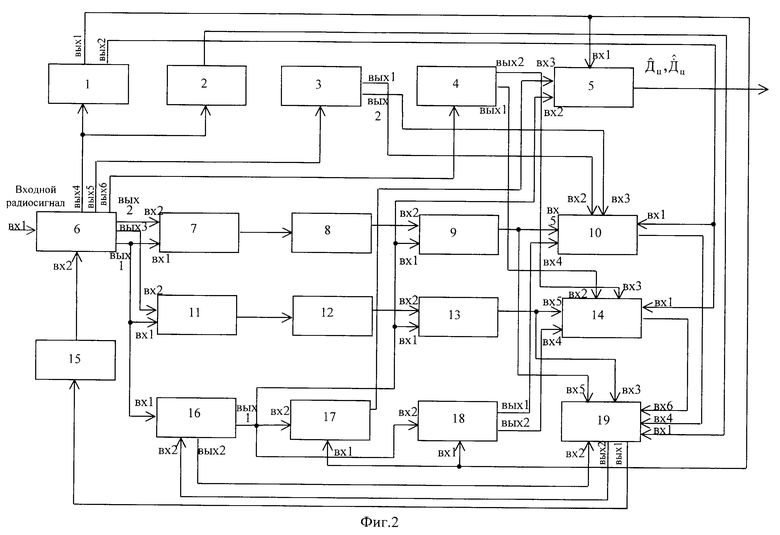
На фиг. 2 изображена структурная схема следящего радиолокационного измерителя дальности с защитой от уводящих помех, где 1 - обнаружитель уводящей помехи, 2 - обнаружитель сигнала цели, 3 - первый обнаружитель сигнала первого сторожевого канала, 4 - второй обнаружитель сигнала второго сторожевого канала, 5 - коммутатор, 6 - трехканальный временной дискриминатор, 7 - первый формирователь относительной дальности до цели, 8 - первый фильтр, 9 - первый компенсатор, 10 - первый анализатор оценок дальности до цели и ее производных, 11 - второй формирователь относительной дальности до цели, 12 - второй фильтр, 13 - второй компенсатор, 14 - второй анализатор оценок дальности до цели и ее производных, 15 - устройство расстановки стробов, 16 - фильтр основного канала, 17 - первый экстраполятор дальности до цели и ее производных, 18 - второй экстраполятор дальности до цели и ее производных, 19 - логическое устройство.
На фиг. 3 приведенные кривые отражают поведение во времени дисперсий ошибок оценивания дальности до цели без компенсации уводящей помехи и с ее компенсацией.
Трехканальный временной дискриминатор 6 состоит из основного и двух сторожевых каналов, разнесенных по дальности, в каждом из которых формируют сигнал ошибки по дальности и сигнал, отселектированный по дальности. Принцип построения трехканального временного дискриминатора описан в [3] . Преобразование, усиление, селекция входных радиосигналов, поступающих с антенной системы, не входящей в состав следящего РЛИ дальности, выполняются в приемном устройстве радиолокационной станции, а формирование сигналов ошибок по дальности в каждом канале осуществляется в дискриминаторе по известным в радиолокации правилам [4] . Сторожевые каналы расположены по дальности симметрично относительно опорной дальности основного канала.
Трехканальный временной дискриминатор формирует сигналы ошибок:
z1 = kосн(Дп- Ду)+ξди (1)
на выходе основного канала и
uст2 = kст(Дц- Ду+ΔД0)+ξст2 (2)
на выходе первого сторожевого канала, настроенного на прием сигналов с меньшей дальности, чем опорная дальность основного канала, либо
uст3 = kст(Дц- Ду-ΔД0)+ξст3 (3)
на выходе второго сторожевого канала, настроенного на прием сигналов с большей дальности, чем опорная дальность основного канала. В (1)-(3): koсн и kcт - коэффициенты передачи дискриминаторов основного и сторожевых каналов; Дп - дальность до ложной (имитируемой) цели; Ду - опорное значение дальности для следящей системы основного канала, определяющее положение временных стробов, формируемых устройством расстановки стробов; Дц - дальность до истинной цели; ±ΔД0 - величина разноса, определяющая смещение по дальности сторожевых каналов относительно основного канала; ξди, ξст2 и ξст3- ошибки измерений в основном и сторожевых каналах трехканального временного дискриминатора 6 соответственно с известными спектральными плотностями.
Если уводящая помеха не действует, то сигнал (1) определяют как ошибку (Дц-Ду) сопровождения цели по дальности в штатном режиме, а uст2,3≈0.
Процедура получения измерений z1, uст2 и uст3 в трехканальном временном дискриминаторе 6 при цифровой обработке сигналов проиллюстрирована на фиг. 1, где показаны дискриминационные характеристики основного канала z1= f(Дп-Ду) и первого и второго сторожевых каналов, расположенных на меньшей и большей дистанции по отношению к основному каналу: uст2 = f(ΔД), uст3 = f(ΔД), где ΔД - ошибка сопровождения сигнала относительно нулевых точек этих характеристик, f - функция, описывающая характеристики дискриминаторов основного и сторожевых каналов. Принцип формирования характеристик uст2 и uст3 такой же, как и при формировании характеристики основного канала. Особенностью здесь является смещение нулевых точек их дискриминационных характеристик относительно нулевой точки характеристики z1 на известную величину ±ΔД0. Для получения сигналов ошибок (1)-(3) в каждом канале осуществляется обработка по известным алгоритмам [4] принимаемых сигналов, прошедших через два смежных одинаковых по длительности строба дальности, один из которых является ранним, а другой - поздним. Эти же два простробированных в трехканальном временном дискриминаторе 6 сигнала, следующие один за другим, образуют в каждом канале сигнал, называемый сигналом, отселектированным по дальности. Указанный сигнал может быть получен также путем стробирования принимаемого сигнала отдельным стробом, середина которого совпадает с осью симметрии раннего и позднего стробов. Данный сигнал, соответствующий интервалу дальности, на который настроен определенный канал трехканального временного дискриминатора 6, поступает на связанный с этим каналом обнаружитель.
Первый 7 и второй 11 формирователи относительной дальности до цели, наблюдаемой соответственно в первом или втором сторожевом канале, на основе сигналов ошибок трехканального временного дискриминатора 6 формируют измеренные значения z2 или z3 дальности до цели относительно опорной дальности основного канала. Использование здесь и далее термина "наблюдаемой" объясняется тем, что в радиоэлектронике под радиолокационным наблюдением понимаются операции измерения координат и параметров движения целей, выполняемые при их обнаружении. Из фиг. 1 видно, что

где разность Дп-Ду оценивается приближенно как z1/kосн, а ΔДп- помеховое приращение дальности.
После появления уводящей помехи по дальности вслед за ней начинает перемещаться нулевая точка основной характеристики z1= f(Дп-Ду) дискриминатора. Через некоторое время сигнал цели попадает в рабочую зону первого либо второго сторожевого канала, что позволяет сформировать измеренное значение z2 (4) или z3 (5). Знак первого слагаемого в z2 и z3 определяется стороной увода, а его величина связана с мгновенной ошибкой сопровождения уводящей помехи, зависящей от законов увода помехи и маневра постановщика помех.
Обнаружитель сигнала цели 2 и обнаружитель уводящей помехи 1, так же как и первый обнаружитель сигнала первого сторожевого канала 3 и второй обнаружитель сигнала второго сторожевого канала 4, выполняют процедуру обнаружения сигналов и уводящей помехи, поступающих с выходов основого, и первого, и второго сторожевых каналов трехканального временного дискриминатора 6 соответственно. Кроме того, обнаружитель уводящей помехи 1, первый обнаружитель сигнала первого сторожевого канала 3 и второй обнаружитель сигнала второго сторожевого канала 4 оценивают энергетические характеристики соответствующих сигналов. В качестве энергетических характеристик могут быть взяты амплитуды или энергии сигнала цели и уводящей помехи.
Фильтр основного канала 16, на вход которого подают сигнал ошибки из основного канала трехканального временного дискриминатора 6, выполняет оценивание дальности до цели или дальности помехи, наблюдаемых в основном канале, и их производных. Первый 8 и второй 12 фильтры осуществляют оценивание относительной дальности до цели и ее производных на основе сигналов z2 и z3, поступающих с выходов первого 7 и второго 11 формирователей относительной дальности до цели соответственно. Алгоритмы фильтрации при реализации заявленного следящего РЛИ дальности должны определяться законами изменения во времени входных воздействий, а также возможностью их практической реализации. Они могут быть выполнены на основе стандартных алгоритмов калмановской фильтрации, адаптивной фильтрации, α-β-фильтрации и др. аппаратурно или программно.
Первый экстраполятор дальности до цели и ее производных 17, включаемый при обнаружении уводящей помехи в основном канале выходным сигналом обнаружителя уводящей помехи, выполняет процедуру экстраполяции движения цели с начальными условиями, в качестве которых используют оценки дальности до цели и ее производных, формируемые фильтром основного канала 16 в момент обнаружения уводящей помехи. Тем самым он обеспечивает экстраполяцию движения цели с прежними параметрами, которые имели место на момент появления уводящей помехи, что необходимо для непрерывного поддержания процесса сопровождения цели. Структура первого экстраполятора дальности до цели и ее производных 17 аналогична структуре фильтра, работающего в режиме экстраполяции, т. е. прогноза, когда отсутствуют результаты измерений на его входе. Второй экстраполятор дальности до цели и ее производных 18, включаемый при обнаружении уводящей помехи в основном канале выходным сигналом обнаружителя уводящей помехи, производит экстраполяцию движения цели с учетом начальных условий, в качестве которых используют оценки дальности до цели и ее производных, формируемые фильтром основного канала 16 в момент обнаружения уводящей помехи, и максимальных значений параметров возможного маневра цели, выполняемого после создания уводящей помехи. Введение данного экстраполятора позволяет учесть ситуацию, когда одновременно с началом действия уводящей помехи цель выполняет специальный маневр для срыва сопровождения в РЛИ дальности.
В первом 9 и втором 13 компенсаторах осуществляют вычитание оценок дальности и ее производных, соответствующих задержке уводящей помехи, наблюдаемой в основном канале, поступающих с выхода фильтра основного канала 16, и оценок относительной дальности до цели и ее производных, поступающих с выходов первого 8 и второго 12 фильтров соответственно. В результате получают оценки дальности до цели и ее производных, наблюдаемых соответственно в первом или втором сторожевых каналах.
Первый 10 и второй 14 анализаторы оценок дальности до цели и ее производных включают в момент обнаружения сигнала в первом обнаружителе первого сторожевого канала 3 и втором обнаружителе второго сторожевого канала 4 соответственно. Сигнал, наблюдаемый в сторожевых каналах, может соответствовать истинной цели либо ложной цели. К ложной цели относят цель, которая имитируется помеховым воздействием в сторожевых каналах двухсторонней уводящей помехой. В первом 10 и втором 14 анализаторах оценок дальности до цели и ее производных осуществляют сравнение оценок дальностей до целей и ее производных, подаваемых с выходов первого 9 и второго 13 компенсаторов, и прогнозируемых оценок дальности до маневрирующей цели и ее производных, подаваемых с выхода второго экстраполятора дальности до цели и ее производных 18, а также сравнение энергетических характеристик сигналов целей, наблюдаемых в первом и втором сторожевых каналах и поступающих с соответствующих обнаружителей, с энергетической характеристикой уводящей помехи, наблюдаемой в основном канале, и выносят решение о наличии истинной цели, наблюдаемой в одном из сторожевых каналов, при условии, что значения оценок дальности до цели и ее производных, поступающих в первый 10 или второй 14 анализатор оценок дальности до цели и ее производных соответственно с первого 9 или второго 13 компенсаторов, находятся в интервале значений, границы которых определяются значениями оценок дальности до маневрирующей цели и ее производных, подаваемых в анализатор со второго экстраполятора дальности до цели и ее производных 18, а значение энергетической характеристики сигнала цели, наблюдаемой в одном из сторожевых каналов, меньше значения энергетической характеристики уводящей помехи, наблюдаемой в основном канале. Необходимость учета энергетических характеристик объясняется сложностью помехово-целевой обстановки. Действительно, в ситуации, когда противником создается двухсторонняя уводящая помеха, сравнение лишь кинематических параметров: дальности и ее производных не позволяет принять правильное решение, так как значения оценок дальности до ложной цели и ее производных, поступающих в анализаторы с первого 9 и второго 13 компенсаторов, находятся в интервале значений, границы которых определяются значениями оценок дальности до цели и ее производных, поступающих в анализаторы со второго экстраполятора дальности до цели и ее производных 18, как и в случае создания односторонней уводящей помехи, поскольку закон увода, как правило, соответствует реальному движению цели. Правильное решение о сложившейся ситуации может быть вынесено с учетом значений энергетических характеристик сигналов, наблюдаемых в сторожевых каналах и основном канале. Анализатор может быть выполнен аппаратурным либо программным способом. При аппаратурной реализации его можно отнести к цифровым комбинационным автоматам, для которых известны методы синтеза их структуры по содержательному описанию функции.
Логическое устройство 19, которое в зависимости от вида выходных сигналов первого 10 или второго 14 анализаторов оценок дальности до цели и ее производных подает оценку дальности до цели, наблюдаемой в одном из сторожевых каналов, с выхода соответствующего компенсатора 9 или 13 на вход устройства расстановки стробов 15 и, кроме этого, оценки дальности до цели, наблюдаемой в одном из сторожевых каналов, и ее производных с выхода компенсатора - на вход фильтра основного канала 16 в качестве новых начальных данных, что обеспечивает перестройку основного канала трехканального временного дискриминатора 6 на прием сигналов истинной цели и подготовку фильтра основного канала 16 к оцениванию дальности до истинной цели. При поступлении сигнала обнаружения цели с выхода обнаружителя сигнала цели 2, после перестройки следящей системы основного канала на оцененное значение дальности до цели, логическое устройство 19 повторно подает оценку дальности с выхода фильтра основного канала 16 в устройство расстановки стробов 15. Следует отметить, что первоначально оценка дальности с выхода фильтра основного канала 16 поступает через логическое устройство 19 на устройство расстановки стробов 15 при штатном сопровождении сигнала цели, а также при слежении за уводящей помехой до момента обнаружения сигнала цели в одном из сторожевых каналов.
Устройство расстановки стробов 15 определяет положение стробов на временной оси и, тем самым, задает опорное значение дальности в основном канале трехканального временного дискриминатора 6 на основе оценок дальности до цели или дальности, соответствующей задержке уводящей помехи, поступающих с выхода логического устройства 19. Это достигается путем формирования следящих стробов основного канала и стробов первого и второго сторожевых каналов. Коммутатор 5 подсоединен к потребителю. Он обеспечивает передачу потребителю оценок дальности до цели и ее производных либо с выхода фильтра основного канала 16, при отсутствии уводящей помехи в основном канале, либо с выхода первого экстраполятора дальности до цели и ее производных 17, при поступлении на вход коммутатора 5 сигнала обнаружения уводящей помехи, наблюдаемой в основном канале, с выхода обнаружителя уводящей помехи 1. Потребителем информации о дальности до цели и ее производных является цифровая вычислительная машина или система индикации.
Из вышеописанного следует, что за счет введения в состав следящего РЛИ дальности трехканального временного дискриминатора 6, первого 7 и второго 11 формирователей относительной дальности, первого 8 и второго 12 фильтров, первого 9 и второго 13 компенсаторов, первого 10 и второго 14 анализаторов оценок дальности до цели и ее производных, второго экстраполятора дальности до цели и ее производных 18 в заявленном устройстве по сравнению с прототипом дополнительно осуществляются оценка энергетических характеристик сигнала цели и уводящей помехи, формирование измеренных значений относительной дальности до цели и ее производных, фильтрация этих значений, и производится сравнительный анализ сигналов цели, наблюдаемой в сторожевых каналах, на принадлежность к истинной цели. Кроме того, обнаружитель уводящей помехи 1, так же как и первый 3 и второй 4 обнаружители сигналов первого и второго сторожевых каналах, дополнительно по сравнению с прототипом оценивают энергетические характеристики соответствующих сигналов.
Заявленное устройство характеризуется следующими связями.
Следящий радиолокационный измеритель дальности содержит трехканальный временной дискриминатор 6, на первый вход которого подают радиосигнал с выхода приемного устройства радиолокационной станции, с его первого выхода сигнал ошибки по дальности основного канала подают на первые входы фильтра основного канала 16, первого 7 и второго 11 формирователей относительной дальности до цели, со второго выхода трехканального временного дискриминатора 6 сигнал ошибки по дальности первого сторожевого канала подают на второй вход первого формирователя относительной дальности до цели 7, с третьего выхода трехканального временного дискриминатора 6 сигнал ошибки по дальности второго сторожевого канала подают на второй вход второго формирователя относительной дальности до цели 11, с четвертого выхода трехканального временного дискриминатора 6 отселектированный по дальности сигнал основного канала подают на входы обнаружителя уводящей помехи 1 и обнаружителя сигнала цели 2, с пятого выхода трехканального временного дискриминатора 6 отселектированный по дальности сигнал первого сторожевого канала подают на вход первого обнаружителя первого сторожевого канала 3, с шестого выхода трехканального временного дискриминатора 6 отселектированный по дальности сигнал второго сторожевого канала подают на вход второго обнаружителя второго сторожевого канала 4; первый выход обнаружителя уводящей помехи 1, характеризующий наличие уводящей помехи в основном канале трехканального временного дискриминатора 6, соединен с первым входом коммутатора 5 и с первыми входами первого 17 и второго 18 экстраполяторов дальности до цели и ее производных, а второй выход обнаружителя сигнала уводящей помехи 1, характеризующий энергетическую характеристику уводящей помехи в основном канале трехканального временного дискриминатора 6, соединен с первыми входами первого 10 и второго 14 анализаторов оценок дальности до цели и ее производных; выход обнаружителя сигнала цели 2 связан с первым входом логического устройства 19; первый выход первого обнаружителя первого сторожевого канала 3, характеризующий наличие сигнала цели в первом сторожевом канале трехканального временного дискриминатора 6, соединен со вторым входом анализатора оценок дальности до цели и ее производных 10, а второй выход первого обнаружителя первого сторожевого канала 3, характеризующий энергетическую характеристику сигнала цели в первом сторожевом канале трехканального временного дискриминатора 6, соединен с третьим входом первого анализатора оценок дальности до цели и ее производных 10; первый выход второго обнаружителя второго сторожевого канала 4, характеризующий наличие сигнала цели во втором сторожевом канале трехканального временного дискриминатора 6, соединен со вторым входом второго анализатора оценок дальности до цели и ее производных 14, а второй выход второго обнаружителя второго сторожевого канала 4, характеризующий энергетическую характеристику сигнала цели во втором сторожевом канале трехканального временного дискриминатора 6, соединен с третьим входом второго анализатора оценок дальности до цели и ее производных 14; выход первого формирователя относительной дальности до цели 7 связан со входом первого фильтра 8; выход второго формирователя относительной дальности до цели 11 связан со входом второго фильтра 12; первый выход фильтра основного канала 16, характеризующий оценку дальности до цели, наблюдаемой в основном канале трехканального временного дискриминатора 6, или оценку дальности, соответствующей задержке уводящей помехи, наблюдаемой в основном канале трехканального временного дискриминатора 6, соединен со вторыми входами первого 17 и второго 18 экстраполяторов дальности до цели и ее производных, с первыми входами первого 9 и второго 13 компенсаторов и вторым входом коммутатора 5, а второй выход фильтра основного канала 16, характеризующий оценку дальности до цели, наблюдаемой в основном канале трехканального временного дискриминатора 6, или оценку дальности, соответствующей задержке уводящей помехи, наблюдаемой в основном канале трехканального временного дискриминатора 6, соединен со вторым входом логического устройства 19; выход первого фильтра 8 подсоединен ко второму входу первого компенсатора 9; выход второго фильтра 12 подсоединен ко второму входу второго компенсатора 13; выход первого экстраполятора дальности до цели и ее производных 17 связан с третьим входом коммутатора 5; первый и второй выходы второго экстраполятора дальности до цели и ее производных 18 связаны соответственно с четвертыми входами первого 10 и второго 14 анализаторов оценок дальности до цели и ее производных; выход первого компенсатора 9 соединен с пятыми входами первого анализатора оценок дальности до цели и ее производных 10 и логического устройства 19; выход второго компенсатора 13 соединен с пятым входом второго анализатора оценок дальности до цели и ее производных 14 и с третьим входом логического устройства 19; выход первого анализатора оценок дальности до цели и ее производных 10 соединен с четвертым входом логического устройства 19; выход второго анализатора оценок дальности до цели и ее производных 14 соединен с шестым входом логического устройства 19; первый выход логического устройства 19, характеризующий оценку дальности до истинной цели, наблюдаемой в основном канале или в одном из сторожевых каналов трехканального временного дискриминатора 6, или оценку дальности, соответствующей задержке уводящей помехи, соединен со входом устройства расстановки стробов 15, а второй выход логического устройства 19, характеризующий оценку дальности до истинной цели, наблюдаемой в одном из сторожевых каналов трехканального временного дискриминатора 6, соединен со вторым входом фильтра основного канала 16; выход устройства расстановки стробов 15 подсоединен ко второму входу трехканального временного дискриминатора 6; с выхода коммутатора 5 оценки дальности до цели и ее производных, формируемые в фильтре основного канала 16, или оценки дальности до цели и ее производных, формируемые в первом экстраполяторе дальности до цели и ее производных 17, подают потребителю.
Структурная схема следящего радиолокационного измерителя дальности, в составе которого функционируют описанные выше составляющие его элементы, представлена на фиг. 2. Динамику протекающих в следящем радиолокационном измерителе дальности процессов рассмотрим на конкретном примере.
Пусть на следящий радиолокационный измеритель дальности, предназначенный для отслеживания процесса
воздействует односторонняя уводящая по дальности помеха, вызывающая помеховые приращения дальности ΔДп, скорости ΔVп и ускорения Δaп:
При отсутствии мер помехозащиты радиолокационный измеритель дальности будет отслеживать процесс
 aп(0) = aц+Δaп0,
aп(0) = aц+Δaп0,
где
В соотношениях (6)-(9): Дц и Дп - соответственно дальности до истинной и ложной (имитируемой) цели; Vц, Vп и ац, aп - соответствующие скорости и ускорения истинной и ложной целей; ξц, ξΔп и ξп- центрированные белые шумы процессов (6)-(8) с известными спектральными плотностями; Дц0, Vц0 и ац0 - начальные значения дальности до цели, скорости и ускорения сближения с ней в момент захвата цели на автосопровождение; ΔVп0 и Δaп0- начальные значения скорости и ускорения, определяемые помеховым сигналом.
Если уводящей по дальности помехи нет (ΔДп = 0, ΔVп = 0, Δaп = 0), то согласно (9) Дп= Дц и осуществляется штатное сопровождение цели по дальности и скорости. После начала увода по дальности вплоть до появления в одном из сторожевых каналов сигнала (2) или (3) в измерении (1) присутствует помеховое приращение дальности ΔДп. В результате Дп≠Дц и на выходе фильтра основного канала 16 получим оценки 
Вслед за этим начнется увод следящих стробов за более мощным сигналом помехи. Так будет продолжаться до тех пор, пока в одном из сторожевых каналов в зависимости от стороны увода не появится сигнал uст2 или uст3, на основании которого вырабатывается измеренное значение относительной дальности (4) или (5), и далее в первом 8 или втором 12 фильтрах формируются оценки  Начиная с момента появления сигнала z2 или z3, в первом 9 или втором 13 компенсаторах вырабатываются достаточно точные оценки
Начиная с момента появления сигнала z2 или z3, в первом 9 или втором 13 компенсаторах вырабатываются достаточно точные оценки  Эти оценки и используются для настройки (возврата) следящей системы основного канала на сопровождение истинной цели после принятия решения в первом 10 или втором 14 анализаторах оценок дальности до цели и ее производных об обнаружении истинной цели.
Эти оценки и используются для настройки (возврата) следящей системы основного канала на сопровождение истинной цели после принятия решения в первом 10 или втором 14 анализаторах оценок дальности до цели и ее производных об обнаружении истинной цели.
При создании двухсторонней уводящей помехи вначале основной канал сопровождает энергетический центр данной помехи. Так как реализовать оба помеховых воздействия с абсолютно идентичными параметрами и симметричными законами увода невозможно, то по мере расхождения помех происходит переход основного канала на сопровождение одной из двух помех. Это приводит к тому, что вторая помеха попадает в один из сторожевых каналов. В результате появляется сигнал uст2 или uст3. Дальнейшее функционирование аналогично рассмотренному выше для случая односторонней уводящей помехи. Однако в данной ситуации энергетическая характеристика уводящей помехи, наблюдаемая в сторожевом канале, сравнима с энергетической характеристикой уводящей помехи, наблюдаемой в основном канале, и поэтому первый 10 или второй 14 анализатор оценок дальности до цели и ее производных не формирует сигнала истинной цели и, тем самым, не разрешает производить перестройку следящей системы основного канала. По мере дальнейшего расхождения уводящих в разные стороны помех в одном из сторожевых каналов появляется сигнал истинной цели, что приводит к обнаружению цели и переходу на ее сопровождение.
Результаты экспериментального исследования заявленного устройства отражены на фиг. 3, где одна из кривых характеризует поведение во времени дисперсии ошибки оценивания дальности до истинной цели без компенсации, а другая - с компенсацией уводящей помехи. Без компенсации ошибки оценивания дальности неограниченно нарастают, т. к. следящая система переходит на сопровождение уводящей помехи, и нормальное функционирование следящего радиолокационного измерителя дальности становится невозможным.
Таким образом, в отличие от традиционных устройств защиты с использованием сторожевых каналов [1] , позволяющих регистрировать лишь факт наличия уводящих помех и выполняющих программный перевод следящих стробов без учета закона увода помехой на экстраполированное или запомненное значение дальности, в заявленном следящем радиолокационном измерителе дальности обеспечивается обнаружение истинной цели, компенсация уводящей помехи в процессе вторичной обработки сигналов и перевод следящей системы на оцененное значение дальности до истинной цели и ее производных. Это приводит к тому, что существенно облегчается процесс захвата сигнала цели при появлении его в основном канале трехканального временного дискриминатора. В результате обеспечивается нормальное функционирование следящего РЛИ дальности при любых законах создания уводящих помех и видах маневра постановщика помех, а также защита от двухсторонних уводящих помех.
Литература
1. Алексеев Ю. Я. , Викулов О. В. , Громов М. В. , Дрогалин В. В. , Канащенков А. И. , Меркулов В. И. , Самарин О. Ф. , Умнов И. Н. , Чернов B. C. Способы и средства помехозащиты радиолокационных измерителей дальности и скорости в режимах сопровождения. Зарубежная радиоэлектроника. М. : - ИПРЖР, 2000, 1, с. 53-56.
2. Патент US 3947848, США, МКИ6 G 01 S 7/36.
3. Добыкин В. Д. , Меркулов В. И. Синтез радиолокационного следящего дальномера, защищенного от уводящих помех //Радиотехника и электроника, 1998, т. 43, 4, с. 441-445.
4. Радиолокационные измерители дальности и скорости. T. 1. Меркулов В. И. , Перов А. И. , Саблин В. Н. и др. ; Под ред. Саблина В. Н. - М. : Радио и связь, 1999, с. 146-407.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАЛЬНОМЕР ПРИ ВОЗДЕЙСТВИИ ПОМЕХИ, УВОДЯЩЕЙ ПО ДАЛЬНОСТИ | 1997 |
|
RU2119174C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ МАЛОВЫСОТНЫХ ВОЗДУШНЫХ И НАЗЕМНЫХ ЦЕЛЕЙ В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2007 |
|
RU2329520C1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛЕЙ | 1988 |
|
RU2144202C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ И ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ В КОГЕРЕНТНОЙ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2005 |
|
RU2298809C9 |
| ОБНАРУЖИТЕЛЬ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2006 |
|
RU2323452C1 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
| ИЗМЕРИТЕЛЬ АЗИМУТА | 1997 |
|
RU2117958C1 |
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ, СКОРОСТЕЙ И УСКОРЕНИЙ ДЛЯ РАДИОТЕХНИЧЕСКИХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2000 |
|
RU2192022C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО СОПРОВОЖДАЕМОЙ ПО УГЛАМ ЦЕЛИ И СКОРОСТИ СБЛИЖЕНИЯ С НЕЙ | 1989 |
|
RU2144201C1 |
| ДВУХДИАПАЗОННЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2181899C2 |

Изобретение относится к радиолокационным системам. Следящий радиолокационный измеритель дальности содержит трехканальный временной дискриминатор, состоящий из основного и двух сторожевых каналов, соединенный с обнаружителями сигнала цели и уводящей помехи, формирователями относительной дальности до цели и фильтром основного канала, компенсаторы уводящей помехи, формирующие оценки дальности до целей, наблюдаемых в сторожевых каналах, анализаторы оценок дальности до цели и ее производных, в которых выносят решение о наличии истинной цели, логическое устройство, которое выдает оценку дальности до цели в устройство расстановки стробов и фильтр основного канала, коммутатор, обеспечивающий передачу оценок дальности до цели и ее производных потребителю. Техническим результатом изобретения является обеспечение помехозащищенности следящего радиолокационного измерителя дальности в сложной помехово-целевой обстановке. 3 ил.
Следящий радиолокационный измеритель дальности содержит трехканальный временной дискриминатор, первый вход которого соединен с выходом приемного устройства радиолокационной станции, а его первый выход соединен с первыми входами фильтра основного канала, первого и второго формирователей относительной дальности до цели, второй выход трехканального временного дискриминатора соединен со вторым входом первого формирователя относительной дальности до цели, его третий выход соединен со вторым входом второго формирователя относительной дальности до цели, четвертый выход соединен со входами обнаружителя уводящей помехи и обнаружителя сигнала цели, пятый выход трехканального временного дискриминатора соединен со входом первого обнаружителя сигнала первого сторожевого канала, а шестой выход соединен со входом второго обнаружителя сигнала второго сторожевого канала, первый выход обнаружителя уводящей помехи соединен с первым входом коммутатора и с первыми входами первого и второго экстраполяторов дальности до цели и ее производных, а его второй выход соединен с первыми входами первого и второго анализаторов оценок дальности до цели и ее производных, выход обнаружителя сигнала цели соединен с первым входом логического устройства, которое в зависимости от вида выходных сигналов первого и второго анализаторов оценок дальности до цели и ее производных выдает оценку дальности до цели и ее производных, первый выход упомянутого первого обнаружителя соединен со вторым входом упомянутого первого анализатора, а второй выход упомянутого первого обнаружителя соединен с третьим входом указанного первого анализатора, первый выход упомянутого второго обнаружителя соединен со вторым входом упомянутого второго анализатора, а второй выход упомянутого второго обнаружителя соединен с третьим входом упомянутого второго анализатора, выход упомянутого первого формирователя относительной дальности до цели соединен со входом первого фильтра, выход второго формирователя относительной дальности до цели соединен со входом второго фильтра, первый выход фильтра основного канала соединен со вторыми входами упомянутых первого и второго экстраполяторов, с первыми входами упомянутых первого и второго компенсаторов, осуществляющих вычитание оценок дальности и ее производных, поступающих с фильтра основного канала, и оценок относительной дальности до цели и ее производных, и вторым входом упомянутого коммутатора, а второй выход фильтра основного канала соединен со вторым входом упомянутого логического устройства, выход первого фильтра соединен со вторым входом упомянутого первого компенсатора, выход второго фильтра соединен со вторым входом упомянутого второго компенсатора, выход упомянутого первого экстраполятора соединен с третьим входом упомянутого коммутатора, первый и второй выходы упомянутого второго экстраполятора соединены соответственно с четвертыми входами упомянутых первого и второго анализаторов, выход упомянутого первого компенсатора соединен с пятыми входами упомянутого первого анализатора и упомянутого логического устройства, выход упомянутого второго компенсатора соединен с пятым входом упомянутого второго анализатора и с третьим входом упомянутого логического устройства, выход первого упомянутого анализатора соединен с четвертым входом упомянутого логического устройства, выход второго упомянутого анализатора соединен с шестым входом упомянутого логического устройства, первый выход упомянутого логического устройства соединен со входом устройства расстановки стробов, а второй выход упомянутого логического устройства соединен со вторым входом фильтра основного канала, выход устройства расстановки стробов соединен со вторым входом трехканального временного дискриминатора, выход упомянутого коммутатора подсоединен к потребителю.
| АЛЕКСЕЕВ Ю.Я | |||
| и др | |||
| Способы и средства помехозащиты радиолокационных измерителей дальности и скорости в режимах сопровождения | |||
| Зарубежная радиоэлектроника | |||
| - М.: ИПРЖР, 2000, №1, с.53-56 | |||
| ДАЛЬНОМЕР ПРИ ВОЗДЕЙСТВИИ ПОМЕХИ, УВОДЯЩЕЙ ПО ДАЛЬНОСТИ | 1997 |
|
RU2119174C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО СОПРОВОЖДАЕМОЙ ПО УГЛАМ ЦЕЛИ И СКОРОСТИ СБЛИЖЕНИЯ С НЕЙ | 1989 |
|
RU2144201C1 |
| US 3947848 А, 30.03.1976 | |||
| US 4010469 А, 01.03.1977 | |||
| СПОСОБ ЭКСПЕРТИЗЫ КАЧЕСТВА ВНЕПОЧЕЧНОГО ОЧИЩЕНИЯ КРОВИ | 1998 |
|
RU2155074C2 |

