Изобретение относится к области автоматического регулирования, а именно к способам управления движением центра масс подвижного объекта (ПО) типа морских и речных судов, летательных аппаратов, управляемых ракет и других объектов, использующих для управления траекторией движения сигналы датчиков параметров движения центра масс (например, приемник спутниковой навигации (СНС)), сигналы с датчиков углового движения (например, датчик курса), сигналы с датчика угловой скорости (ДУС), сигналы с датчика положения рулевой машины, который служит для организации отрицательной обратной связи (позиционный привод).
Известны способы управления подобных ПО (см. «Задачи навигации и управления при стабилизации судна на траектории», С.П. Дмитриев, А.Е.Пелевин, Санкт-Петербург, 2002 г., «Динамика систем управления ракет с бортовыми цифровыми вычислительными машинами», под редакцией докт.технических наук М.С.Хитрика, М., 1972 г.).
По заданным параметрам программной траектории движения управление ПО осуществляется на одной (для морских судов) или двух плоскостях (боковая и продольная плоскость) для ЛА и управляемых ракет. Способ формирования сигналов, подаваемых на рулевую машину, охваченной отрицательной обратной связью, в основном, одинаков. Поэтому изложение сущности изобретения проводится на основе анализа управления лишь в боковой (горизонтальной) плоскости, характерной для всех 3-х рассматриваемых типов подвижных объектов.
На основании информации о текущих параметрах движения рассчитывается боковое отклонение подвижного объекта Δz и скорость его изменения  от программной траектории и в соответствии с выбранными коэффициентами N0 и N1 формируются команды для изменения курса
от программной траектории и в соответствии с выбранными коэффициентами N0 и N1 формируются команды для изменения курса

где  - программный курс на траектории.
- программный курс на траектории.
На рулевой привод подается команда 

Δψ=ψпр-ψ,
где А0, A1 - коэффициенты управления,
ω - угловая скорость изменения курса,
ψ - текущий курс подвижного объекта.
Основной недостаток такого способа управления заключается в том, что при действии на ПО возмущений (возмущающие сила и момент) из-за проблемы устойчивости не удается подобрать коэффициенты N0, N1 более оптимально, а введение стабилизации по курсу не позволяет принципиально обеспечить высокую точность управления движением центра масс ПО, т.к. это противоречит принципу инвариантности. В работе В.И.Асриева «Проектирование инвариантных систем автоматического регулирования», вопросы специальной радиоэлектроники, серия 15, выпуск 13, 1965 г. показано, что принципиально невозможно обеспечить выполнение условий инвариантности одновременно по курсу и боковому отклонению.
При решении задачи стабилизации судна на траектории в выражении (1) дополнительно вводится сигнал интеграла от бокового отклонения (ПИД-регулятор), равный
 .
.
Введение сигнала, равного интегралу от бокового отклонения, позволяет повысить точность управления ПО при его движении по программной траектории. Однако, с точки зрения устойчивости, интегральное управление повышает порядок системы, и платой за обеспечение большей точности является появление в переходных процессах колебаний и увеличение времени переходного процесса.
Наиболее близким способом к заявляемому изобретению является способ управления, изложенный в патенте RU 2335008 С1 («Система управления угловым движением летательного аппарата с интегрирующим приводом»). Рациональным элементом системы является повышение точности управления угловым движением ЛА не введением интегрирующей коррекции, а за счет использования интегрирующего свойства рулевого привода. Этот способ не повышает порядок системы, тем самым упрощая задачу обеспечения устойчивости, но для работоспособности системы необходимо использовать сигналы с датчика угловых ускорений. Сложности практической реализации высокоточного датчика угловых ускорений существенно ограничивают возможности системы. Кроме того, интегрирующий привод (т.е. отсутствие отрицательной обратной связи в контуре рулевого привода) еще более усложняет проблему устойчивости при управлении траекторией движения ПО, имеющего намного более высокий порядок системы и более жесткие требования к качеству стабилизации курса.
Задачей изобретения является повышение точности и динамичности управления траекторией движения ПО относительно программы при сохранении всех положительных свойств системы с отрицательной обратной связью (ООС) рулевого привода в области высокочастотной стабилизации углового (курса) движения объекта управления.
Поставленная задача была решена за счет того, что в известном способе управления с рулевой машиной, охваченной отрицательной обратной связью, вводится дополнительно положительная обратная связь (ПОС), компенсирующей ООС в области низких частот (т.е. в области рабочих частот контура центра масс) с передаточной функцией вида
где коэффициент КПОС эквивалентен коэффициенту усиления по ООС, а τ - постоянная времени звена гибкой обратной связи (ГОС), вводимого в контур стабилизации курса и имеющего следующий вид:
Положительные и отличительные свойства предлагаемого способа заключаются в том, что в области рабочих частот контура стабилизации центра масс рулевая машина является интегрирующим приводом исполнительного органа, а стабилизация курса по медленно меняющейся составляющей сигналов центра масс исключена, т.е. выполняется требование принципов инвариантности о возможности их выполнения лишь по одной координате (либо инвариантность по курсу, либо по отклонению центра масс от программы - рассматриваемый случай).
Управление подвижным объектом по заявленному способу осуществляется следующим образом.
При действии возмущений или отработке начальных условий реакция системы управления в первое время аналогична реакции системы классической структуры с жесткой обратной связью рулевого привода, так как положительная обратная связь начнет действовать приблизительно через время 3·τ, при этом размыкание контура стабилизации курса также начнется через такое же время (звено ГОС (5) на высоких частотах имеет коэффициент передачи, равный 1). Через отмеченное время вступает в действие ПОС, и система начинает работать уже как система с интегрирующим приводом и разомкнутым контуром стабилизации курса. В этом случае выполняются все условия инвариантности системы к возмущающим моменту и силе, чем обеспечивается в установившемся режиме нулевое значение статической ошибки.
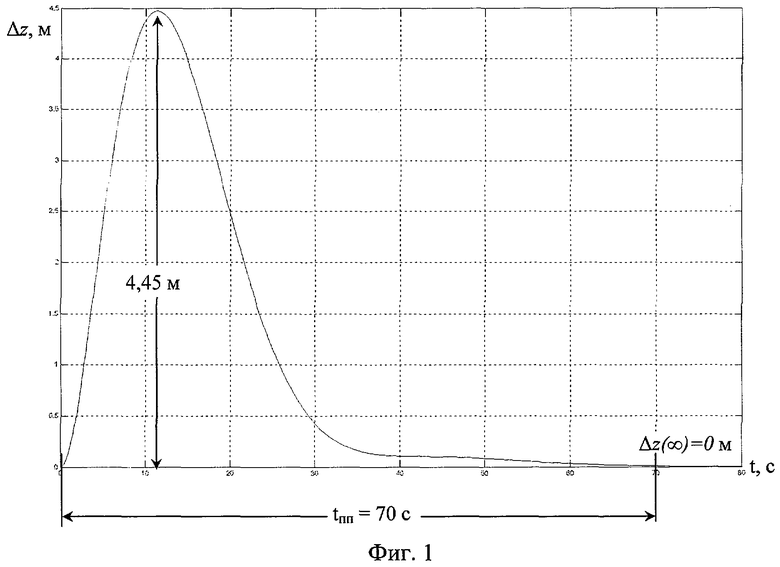
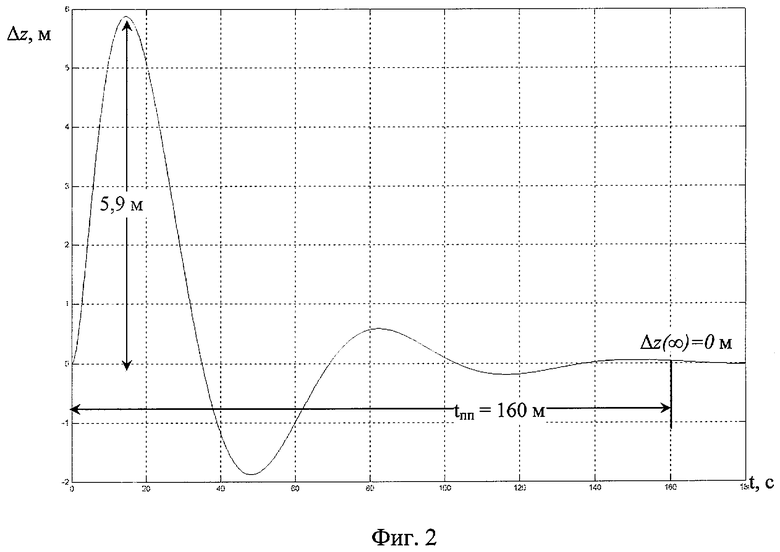
Для подтверждения вышеизложенного была осуществлена программная реализация данного способа управления на модели судна (типа фрегата проекта 11356 (см. «Задачи навигации и управления при стабилизации судна на траектории», С.П.Дмитриев, А.Е.Пелевин, Санкт-Петербург, 2002 г.)), в которой проведено при равных условиях сравнение результатов моделирования процессов стабилизации движения центра масс при предлагаемом способе управления и при способе классической структуры.
На Фиг.1 и 2 приведены графики переходных процессов фрегата по координате бокового отклонения Δz под воздействием возмущающей силы с предлагаемым методом управления и с законом управления классической структуры соответственно. Из представленных графиков следует, что показатели динамической (перерегулирование, время установления переходных процессов) и статической точности (ошибка по боковому отклонению) в предлагаемом способе составляют: перерегулирование σ=4.45 м, время регулирования tпп=70 с, статическая ошибка 0 м. В системе прототипа (классическая структура) эти показатели соответственно равны 5.9 м, 160 с, 0 м. Из приведенных результатов сравнения следует, что предлагаемый способ обеспечивает высокие показатели управления движением подвижного объекта при стабилизации его относительно программной траектории. В системе управления с предлагаемым способом управления реализуются практически предельные показатели динамической и статической точности, определяемые динамическими характеристиками объекта управления и рулевого привода.
Предложенный способ управления подвижным объектом допускает существенное упрощение структурной схемы системы. Из приведенной передаточной функции гибкой обратной связи (5) следует, что можно не использовать датчик курса (гирокомпас или магнитный компас), а дополнительно использовать сигнал с датчика угловой скорости (ДУС), пропустив его через инерционное звено
Система управления траекторией движения подвижного объекта без использования сигналов с датчика курса одновременно устраняет воздействие на систему ошибок гирокомпаса или магнитного компаса (погрешности привязки осей чувствительности, уходы, шумы, ошибки учета магнитного склонения и девиации).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2012 |
|
RU2511610C1 |
| СПОСОБ ДВУХКАНАЛЬНОГО УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ОБЪЕКТОВ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ | 2016 |
|
RU2629922C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1991 |
|
RU2090463C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| АВТОРУЛЕВОЙ СУДНА | 2009 |
|
RU2410282C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2483973C2 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
Изобретение относится к области приборостроения и может быть использовано в системах высокоточного управления движением центра масс подвижных объектов. Технический результат - расширение функциональных возможностей за счет повышения статической и динамической точности системы управления траекторией движения подвижного объекта. Для достижения данного результата рулевую машину охватывают положительной обратной связью, а в контур системы стабилизации курса вводится разделительный фильтр в виде гибкой обратной связи, отключающий стабилизацию курса на низких частотах и обеспечивающий выполнение условий позиционной инвариантности. 1 з.п. ф-лы, 2 ил.
1. Способ высокоточного и динамичного управления траекторией движения подвижного объекта (морские и речные суда, летательные аппараты, управляемые ракеты), использующий для управления траекторией движения сигналы датчиков параметров движения центра масс (например, приемник спутниковой навигационной системы), сигналы датчика углового движения (например, гирокомпас), сигналы датчика угловой скорости, определение отклонения от программной траектории и скорость его изменения, при этом в соответствии с выбранными коэффициентами формируются управляющие команды на рулевую машину, охваченную отрицательной обратной связью, отличающийся тем, что в контур рулевой машины дополнительно вводится положительная обратная связь, компенсирующая в области частот контура стабилизации центра масс отрицательную обратную связь и шарнирный момент рулевой машины (исполнительного органа), а в контур стабилизации курса вводится звено гибкой обратной связи (разделительный фильтр), исключающее стабилизацию курса на рабочих частотах центра масс.
2. Способ высокоточного и динамичного управления траекторией движения подвижного объекта (морские и речные суда, летательные аппараты, управляемые ракеты) по п.1, отличающийся тем, что для исключения влияния ошибок датчика курса на вход разделительного фильтра подается сигнал не с датчика курса, а с датчика угловой скорости, пропущенный через инерционное звено.
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335008C1 |
| Бортовые системы управления полетом | |||
| /Под общей редакцией Ю.В.БАЙБОРОДИНА | |||
| - М.: Транспорт, 1975, с.254 | |||
| Устройство координированного регулирования углового бокового движения летательного аппарата | 1990 |
|
SU1751716A1 |
| МИХАЛЕВ И.А | |||
| и др | |||
| Системы автоматического управления самолетом | |||
| - М.: Машиностроение, 1987, с.174 | |||
| БОДНЕР В.А | |||
| Системы управления летательными аппаратами | |||
| - М.: Машиностроение, 1973, с.118-122 | |||
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |

