Изобретение относится к области обработки сигналов, может иметь применение в радио- или акустической локации (активной и пассивной), дефектоскопии, связи, навигационной и звукотехнике.
Обнаружение полезных сигналов на фоне помех - задача, возникающая почти везде, где дело имеют с сигналами. При всей сущностной специфике и предметной конкретике областей применения, особенностей потребительских требований и внешних условий - некоторая общность известных подходов к решению этой задачи просматривается и сквозь такие альтернативы (в некотором смысле), как аналоговая или цифровая реализации алгоритмов, обработка во временной или в частотной области. Не будет исключением в этом отношении и заявляемый способ, технические реализации которого конкретными устройствами могут быть весьма разнообразны, но суть дела (способ, техническая "идея") едина.
Наиболее фундаментальным и универсальным принципом "обнаруженческих" задач является минимизация (посредством тех или иных преобразований сигнала) "объема" фазового пространства сигнальной компоненты в пространствах пар дуальных переменных (например: времени и частоты, корреляционных функций и спектров мощности, или, более общо, - кумулянтных функций и полиспектров, базового "алфавита" кодированных посылок и декодирующих последовательностей), то есть, как говорят практики, - "сжатие сигнала", вследствие чего в этой области локализации функции неопределенности (в пространстве действительных частей частот и временных сдвигов для тональных сигналов это - полосы, узкие по оси частот, вытянутые вдоль другой оси; для широкополосных - наоборот) достигается максимальное отношение сигнала к шуму. Нередко этот принцип применяется вначале к отдельным шумовым компонентам, например узкополосным наводкам, которые в результате такой локализации поддаются режекции без существенного искажения полезного сигнала, не локализованного в той же фазовой области данного представления. "Нестационарность" в данном контексте означает, что для различных временных выборок сигнала не предполагается постоянства областей локализации в фазовом пространстве полезных или шумовых компонент сигналов, даже с учетом погрешностей. Само же фазовое пространство представления может не включать времени в качестве независимой координаты.
Развитие систем связи, навигации, радио- и гидролокации потребовало существенного усложнения обнаруженческих задач, и теперь в конкурентноспособных технических комплексах уже редко удается обойтись элементарным способом контроля наличия сигнала по признаку превышения фиксированного порога во временной или частотной области. Иногда в таких случаях помогает вычитание из пороговых уровней и значений сигнала (в том или ином представлении) некоторой стационарной составляющей, так или иначе задаваемой для данного состояния системы, относимой к уровню фона. Однако нередко приходится вводить подсистемы для динамической коррекции таких фоновых значений и пороговых уровней. Еще одно усложнение возникает, когда фон в рабочей области не может считаться равномерным. Тогда приходится задаваться вопросами вычитания из сигнала фона, может быть, даже адаптивного, что бывает несовместимо с требуемым представлением истинного сигнала; простейший пример - вычитание фона, сравнительно просто осуществляемое для спектров мощности, вообще говоря, вследствие неоднозначности восстановления фаз по спектрам мощности, не предполагает возможности восстановления выделенного таким способом сигнала ни к частотному, ни ко временному представлению. Потому - известных технических решений, обеспечивающих обнаружение сигналов в условиях неоднородного и нестационарного фона, несмотря на типичность такого рода задач, немного. А тем, что известны, присущи существенные ограничения применимости.
Например, - устройство с сигнальным процессором, использующее для вычитания нестационарного фона без искажения истинного сигнала адаптивную фильтрацию согласно японскому патенту JP 2007124678, включает параллельную обработку принятого сигнала двумя адаптивными фильтрами с различными постоянными временами адаптации, причем один из них вырабатывает управляющий сигнал для другого. Посредством такого устройства можно адаптивно отслеживать изменения спектрально-неоднородного фона, но оно требует для своей работы знания исходного истинного ("desired" - по терминологии, принятой в адаптивной фильтрации) сигнала, что существенно ограничивает область применимости этого технического решения.
Наиболее близким по сущности к заявляемому способу является метод и аппаратура для подавления узкополосных шумовых компонент при цифровой записи речевых сигналов, представленные в патентном документе US 2008/0069364 (МПК - H04R 5/00). При такой постановке задачи, на каком-то этапе обработки сигнала полезный сигнал и шумовая компонента меняются местами, и, как отмечалось выше, в обобщенном смысле задача становится стандартной "обнаруженческой". Согласно этому методу обработка сигнала включает: дискретизацию входного сигнала, разбиение его на временные выборки (фреймы), Фурье-преобразования выборок и получение спектров мощности, аппроксимацию - усреднение в частотной области спектров мощности и вычитание этих аппроксимированных (фоновых) спектров из исходных спектров мощности, сравнение значений разностных спектров с заданными пороговыми уровнями, определение частотных диапазонов узкополосных помех (превышающих этот заданный уровень) и при их наличии - подавление этих помех в исходных сигналах, наконец, - сборка выборок. При этом достигается адаптивность относительно спектрально-неоднородного фона (в данном случае - речевого сигнала). Однако метод применим для обнаружения лишь узкополосных сигналов. Кроме того, ограниченная применимость его обусловлена также использованием для детектирования сигнала лишь спектров мощности, не восстанавливаемых к исходному представлению.
Целями изобретения являются: расширение условий применимости методов обнаружения сигналов, а также повышение точности и достоверности результатов.
Для достижения этих целей детектирование сигнальных посылок осуществляют в таком пространстве представления, инвариантном относительно сдвигов во времени, в котором полезный сигнал имеет наиболее компактную локализацию по сравнению с шумовыми компонентами, но в отличие от прототипа критерием появления сигнала считается превышение над пороговым уровнем некоторого функционала, характеризующего отличие сигнала, усредненного с большой постоянной времени и играющего роль фоновой составляющей, относительно сигнала, усредненного с малой (или же, практически, нулевой при достаточно высоком отношении сигнала к шуму) постоянной времени, причем адаптивность определения фоновой составляющей в момент обнаружения сигнала автоматически выключается, а с окончанием поступления сигнала включается снова (Инвариантность относительно сдвигов является условием, обеспечивающим возможность усреднения во времени). Возможно дополнительное определение - полезный это сигнал или помеховый - с привлечением других признаков, но чаще всего этот вопрос снимается уже соответствующим выбором пространства представления и параметров усреднения (например, - в условиях широкополосного, медленно меняющегося фона и сравнительно локализованных по частоте и времени сигнальных посылок). Если требуется не только обнаружение фактов появления сигналов, но и восстановление их к исходному представлению (например, временному), класс пространств, среди которых ищется оптимальное представление для решения обнаруженческой задачи, ограничивается такими, которые допускают восстановление, может быть частичное, как, например, из пространства биспектров сигналы восстанавливаются с точностью до констант и "чистых", монохроматических компонент (не связанных с другими гармоническими составляющими посредством нелинейных кумулянтных соотношений). Это обстоятельство может быть даже полезным для дополнительной фильтрации сигнала и кодирования. … Такая немаловажная для многих приложений характеристика, как время задержки обнаружения сигнала, связана с постоянной времени быстрого канала (того, у которого "малая" постоянная времени) и зависит, собственно, не от методических ограничений, а от шумовых и сигнальных характеристик входных данных. Если преобразование сигнала к нужному представлению включает разбиение на выборки (фреймы) с некоторым наложением оконных функций, и статистические характеристики сигнала достаточны для его определения по одной выборке, то максимальная задержка составит соответственно время набора 1-1.5 таких выборок. Время же адаптации к новым, неизвестным характеристикам фона связано с постоянной времени (или с числом временных выборок для усреднения) в медленном (фоновом) канале.
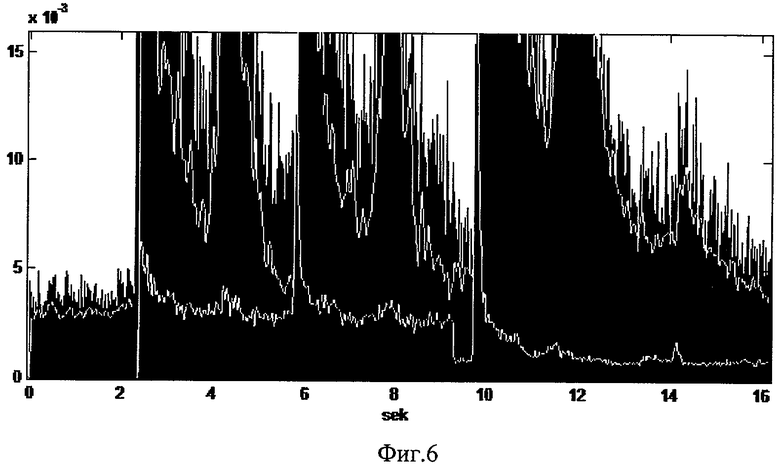
На фигурах приведены иллюстративные примеры результатов работы заявляемого способа в двух вариантах реализации: первый - обнаружение сигналов на нестационарном, спектрально-неравномерном фоне детектированием сигналов по спектрам мощности (фиг.1-5), второй - по биспектрам (фиг.6).
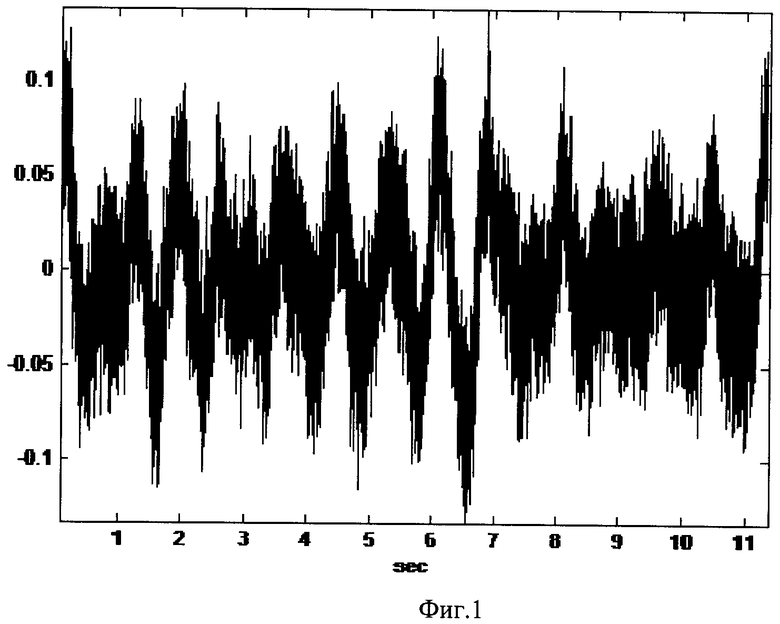
На фиг.1 представлен исходный сигнал - фрагмент оцифрованной магнитофонной записи подводных шумов при проходящем в некотором отдалении судне с работающим гидролокатором.
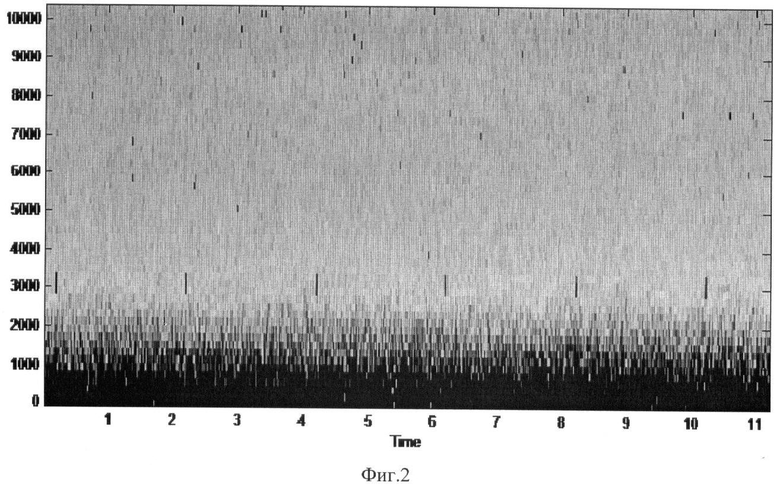
На фиг.2 - спектрограмма этого сигнала с кодировкой интенсивности оттенками серого (по оси ординат - герцы).
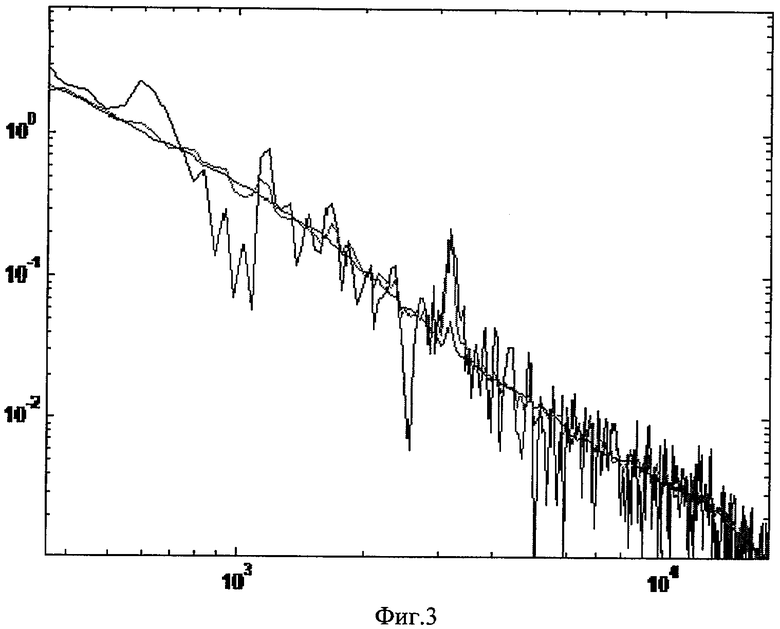
На фиг.3 - спектральные амплитуды для одной из выборок исходного сигнала, а также - сигнала с малым временем усреднения, задаваемого небольшим количеством выборок, используемых для усреднения, и сигнала с большим временем усреднения, играющего роль фона. (Двойной логарифмический масштаб; по оси абсцисс - герцы.) Видно, что - ввиду большой дисперсии сигнала - некоторое усреднение его для представления в критерии обнаружения весьма целесообразно. Так как в данном случае необходимо контролировать сигналы в широком частотном диапазоне, проблема детектирования осложняется сильной частотной неоднородностью и нестационарностью фонового сигнала, не позволяющих выбрать частотно-независимый порог для обеспечения высокой чувствительности в широком частотном диапазоне (частотная зависимость шумов в естественных, в том числе морских водных бассейнах обычно не слишком отличается от 1/f, что имеем и в данном случае).
На фиг.4 представлена огибающая (то есть амплитудные, квадратурные значения) сигнала гидролокатора, выделенная из представленного выше сигнала заявляемым способом (по оси абсцисс - секунды).
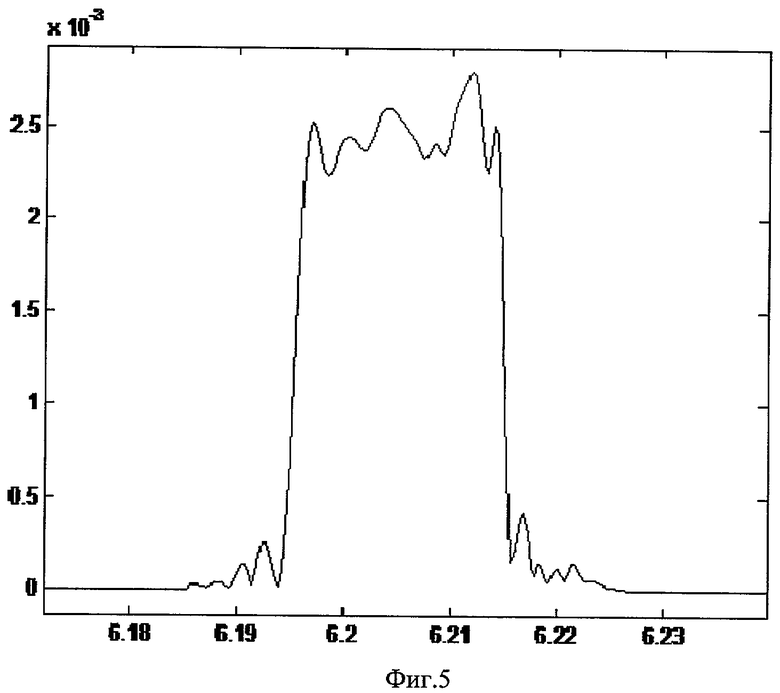
На фиг.5 - более детальный вид одного из пиков детектируемого сигнала. Так как для оценок параметров сигнала производится выделение спектральных пиков в комплексных спектрах выборок и восстановление аналитического сигнала, включающего фон в соответствующей спектральной полосе, погрешность оценки огибающих вследствие этого возрастает, но, зато, фронты сигналов определяются с точностью порядка 1 мсек (эта методология требует весьма аккуратного обхождения, в частности, с техникой спектральных и временных окон, при всей популярности которой метрологически-корректные методические решения в технической литературе или программном обеспечении найти непросто).
Фиг.6 иллюстрирует результаты применения заявляемого способа обнаружения широкополосного шумового сигнала при наличии нестационарных сильных широкополосных помех, реализованного посредством биспектральной адаптивной фильтрации. В данном примере спектры широкополосного полезного сигнала и помеховых составляющих перекрываются так, что разделение их по спектрам мощности оказывается невозможным; приходится искать представления, более критичные к тонким различиям. Таковыми оказываются, в частности, кумулянтные функции или их частотные представления - полиспектры, выявляющие нелинейные свойства объектов, сигналы от которых анализируются. Их оценки - так же, как и "обычных" комплексных спектров или спектров мощности (то есть - спектральных представлений кумулянтных функций второго порядка, совпадающих с обычными корреляционными функциями) - могут производиться с различным усреднением-накоплением по времени (или по числу усредняемых выборок). Потому заявляемый способ вполне применим и в данном случае. Методология при этом, по существу, является обобщением методологии работы с обычными спектрами, и на такого рода деталях здесь останавливаться не будем. Существенное различие лишь в том, что восстановление исходных сигналов по полиспектральным оценкам возможно, хоть и не вполне однозначно (что, как отмечалось выше, может играть и положительную роль), но представляет значительные вычислительные затруднения, тем более, что известные по открытой литературе алгоритмы нельзя, вообще говоря, признать удовлетворительными (что, однако, не означает их отсутствия). На чертеже представлена запись шумов транспортного средства с наложенными на нее интенсивными широкополосными помеховыми сигналами, а также - усредненные огибающие этих двух компонент, полученные с применением заявляемого способа. Сигнал от транспортного средства заканчивается через 9.1 сек от начала представленного фрагмента записи, а помеховая составляющая возникает через две с небольшим секунды от начала и не прекращается с исчезновением транспортного сигнала. Адаптивность медленного (фонового) биспектрального фильтра, подстраивающегося к характеристикам сигнала от транспортного средства, выключается с появлением другой составляющей, идентифицируемой по критерию резкого изменения характеристик оценок в быстром канале по сравнению с характеристиками сигнала в медленном канале (фоне). Из возможных вариантов оценки уровня сигнала здесь использовалась ортогонализация компонент сигналов в биспектральной области и соответствующего пересчета к значениям огибающих. Для каждой новой появляющейся компоненты сигнала возможно включение своего адаптивного фильтра и разделение компонент их ортогонализацией; в данном примере число их ограничено двумя. При появлении помехового сигнала второй такой адаптивный фильтр включается в режиме адаптации, и на этот период времени оценка уровня этой составляющей возможна лишь с возвратом к пересчету прежних значений, но здесь этого не предпринималось, поэтому в огибающей второй компоненты появляется задержка (порядка десятой доли секунды) относительно момента появления этой помехи. Ход огибающей, представляющей оценку вклада транспортного средства, свидетельствует о наличии некоторого просачивания помеховой составляющей, и неполное зануление после 9.1 сек от начала, для исключения чего возможно более аккуратное решение методических решений или выбор более адекватного представления сигналов (например, триспектрами или вейвлетами, или чем-то еще). Тем не менее заявляемый способ и в данном примере обнаруживает свою работоспособность, причем довольно эффективную по сравнению с широко известными способами.
Данные примеры реализации заявляемого способа представляют два варианта из необозримого разнообразия адаптивных методов фильтрации, включающих не только полиспектры различного порядка, но также работу и во временной области, с вейвлетами, с нечеткими множествами, нейронными процессорами и т.д. Условием применимости, как оговаривалось, является лишь инвариантность представления сигнала относительно сдвигов во времени ("задержек"), обеспечивающая возможность усреднения (или, как обычно говорится, "сглаживания") сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГИСТРАЦИИ И АНАЛИЗА СИГНАЛОВ АКУСТИЧЕСКОЙ ЭМИССИИ | 2014 |
|
RU2570592C1 |
| СПОСОБ ПЕРЕДАЧИ СООБЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2097924C1 |
| Способ регистрации и анализа сигналов акустической эмиссии в системе диагностического мониторинга производственных объектов | 2019 |
|
RU2709414C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2042151C1 |
| Способ регистрации шумоизлучения морского подводного объекта | 2020 |
|
RU2746312C1 |
| Способ обнаружения шумящих в море объектов | 2021 |
|
RU2780408C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773269C1 |
| Способ адаптивного многоканального обнаружения радиосигналов в условиях помех с неизвестными параметрами | 2021 |
|
RU2768217C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ ИНФОРМАЦИОННЫХ ПРИЗНАКОВ | 2024 |
|
RU2828828C1 |

Изобретение относится к области обработки сигналов, может иметь применение в радио- или акустической локации (активной и пассивной), дефектоскопии, связи, навигационной и звуковой технике. Сущность заявляемого технического решения заключается в том, что детектирование сигнальных посылок осуществляют в таком пространстве представления, инвариантном относительно сдвигов во времени, в котором полезный сигнал имеет наиболее компактную локализацию по сравнению с шумовыми компонентами, при этом критерием появления сигнала считается превышение над пороговым уровнем некоторого функционала, характеризующего отличие сигнала, усредненного с большой постоянной времени, играющего роль фоновой составляющей, относительно сигнала, усредненного с малой (или же, практически, нулевой в случае достаточно высокого отношения сигнала к шуму) постоянной времени, причем адаптивность определения фоновой составляющей в момент обнаружения сигнала автоматически выключается, а с окончанием поступления сигнала включается снова. Достигаемым техническим результатом изобретения является повышение точности и достоверности результатов обработки сигналов с расширением условий применимости. 6 ил.
Способ обнаружения сигнальных посылок на нестационарном, спектрально-неравномерном фоне, заключающийся в том, что детектирование сигнальных посылок осуществляют в таком пространстве представления, инвариантном относительно сдвигов во времени, в котором полезный сигнал имеет наиболее компактную локализацию по сравнению с шумовыми компонентами, отличающийся тем, что критерием появления сигнала считают превышение над пороговым уровнем функционала, характеризующего отличие сигнала, усредненного с большой постоянной времени, принимаемого в качестве фоновой составляющей, относительно сигнала, усредненного с малой постоянной времени, причем в моменты обнаружения сигнала адаптивный фильтр переключают в состояние независимости от изменений фоновой составляющей, а с окончанием поступления сигнала фильтр снова переводят в состояние адаптивности, при этом для каждой новой появляющейся компоненты используют свой адаптивный фильтр, а для разделения компонент применяют их ортогонализацию.
| US 2008069364 A, 20.03.2008 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ИМПУЛЬСНОГО РАДИОСИГНАЛА НА ФОНЕ МЕШАЮЩЕГО РАДИОИМПУЛЬСА И БЕЛОГО ШУМА | 1999 |
|
RU2160905C1 |
| СПОСОБ АНАЛИЗА НЕСТАЦИОНАРНОГО ПРОЦЕССА | 1998 |
|
RU2159956C2 |
| ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 1998 |
|
RU2173468C2 |
| СПОСОБ ПЕРЕДАЧИ СООБЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2097924C1 |
| US 3866223 A, 11.02.1975 | |||
| US 4804962 A, 14.02.1982 | |||
| US 4965792 A, 11.09.1990 | |||
| US 5491487 A, 13.02.1996. | |||

