Изобретение относится к области гидроакустики, а именно к способу регистрации шумоизлучения морского подводного объекта в широкой полосе частот и может быть использовано при регистрации шумоизлучения морского подводного объекта в условиях повышенного уровня и нестационарности фоновых шумов (помех) в пределах времени регистрации прохода морского подводного объекта. Изобретение может быть использовано для регистрации шумоизлучения движущегося морского подводного объекта, а также может быть использовано для обнаружения морских подводных объектов подводным объектом, находящимся в неблагоприятных, для обнаружения, гидрологических условиях.
Процедура измерения шумоизлучения движущегося морского подводного объекта (МПО) заключается в фиксации уровней значения проходной характеристики, получаемых путем измерений текущих значений мощности сигналов подводного шума движущегося морского подводного объекта. Измерения производятся в условиях фоновых шумов (помех), что в реальных условиях затрудняет регистрацию проходной характеристики движущегося морского подводного объекта, поскольку при высоком уровне помех характеристика прохода оказывается искаженной случайными флуктуациями нестационарной гидроакустической помехи.
Существует метод выделения сигнала из смеси сигнал + помеха при регистрации проходной характеристики морского подводного объекта.
Известен метод энергетического вычитания помехи (ЭВП) при измерении шумоизлучения морского подводного объекта. Сущность метода заключается в оценке уровня помехи по краям проходной характеристики (т.е. там, где уровень полезного сигнала во много раз меньше уровня помехи) и последующего вычитания этого уровня из максимального значения проходной характеристики. [Новиков А.К. Статистические измерения и обнаружение сигналов. - СПб.: ЦНИИ им. акад. А.Н. Крылова, 2006 г., стр. 151-154].
Основным недостатком метода ЭВП, взятого за прототип, является то, что этот метод имеет малую помехоустойчивость в условиях нестационарной помехи в пределах времени регистрации прохода морского подводного объекта. Кроме этого, при направленном в нос или корму характере шумоизлучения источника оценка помехи производится с большой погрешностью, обусловленной недостаточным спадом сигнальной составляющей.
На устранение этого недостатка направлено заявленное изобретение, технической задачей которого является повышение точности измерения уровня шумоизлучения путем создания способа регистрации шумоизлучения морского подводного объекта.
Реализация поставленной технической задачи позволяет добиться следующего технического результата:
- создан способ регистрации шумоизлучения морского подводного объекта в широкой полосе частот в условиях повышенного уровня и нестационарности фоновых шумов (помех) в пределах времени регистрации прохода морского подводного объекта.
Для достижения указанного технического результата предложен «способ регистрации шумоизлучения морского подводного объекта» с учетом постоянно изменяющейся помеховой обстановки в районе измерения, заключающийся в том, что сначала в приемном устройстве регистрируют амплитудно-частотную характеристику (АЧХ) шумового поля водного пространства, затем ее используют для последующей обработки в блоке первичной обработки сигналов. Далее во время регистрации морского подводного объекта в водном пространстве в области расположения приемного устройства формируют АЧХ смеси сигнала шумоизлучения морского подводного объекта и помехи шумового поля водного пространства (АЧХ смеси), после АЧХ смеси подают на вход блока первичной обработки сигналов и используют для последующей обработки.
Принципиальным отличием от прототипа является то, АЧХ шумового поля водного пространства подают на вход временного буфера и далее на опорный вход последовательно соединенного с ним адаптивного фильтра дополнительно введенного блока адаптивно-временной обработки; после этого во время регистрации морского подводного объекта, АЧХ смеси подают на вход временного буфера и далее на основной вход адаптивного фильтра дополнительно введенного блока адаптивно-временной обработки.
Затем выделенную АЧХ сигнала шумоизлучения морского подводного объекта через амплитудный детектор подают на регистрирующие устройство, где регистрируют АЧХ морского подводного объекта.
Заявленный способ реализован в предложенном устройстве для регистрации шумоизлучения морского подводного объекта, содержащем приемное устройство, состоящее из последовательно соединенных подводного устройства и блока согласования с возможностью передачи сигнала на вход блока первичной обработки сигналов приемного канала, содержащего последовательно соединенных блока фильтров и аналого-цифрового преобразователя, выход которого последовательно соединен с входом временного буфера блока адаптивно-временной обработки, выход которого, через опорный и основной вход соединен адаптивным фильтром блока адаптивно-временной обработки, выход которого соединен с входом амплитудного детектора, выход которого через регистрирующее устройство, соединен с входом блока отображения информации.
Основой блока адаптивно-временной обработки (АВО), является нерекурсивный адаптивный фильтр, типа LMS с временным буфером.
Такое конструктивное решение изобретения за счет отличительных признаков дало новые технические эффекты.
Использование блока адаптивно-временной обработки расширило возможности изобретения, в результате которого заявленный способ производит регистрацию шумоизлучения морского подводного объекта.
Блок адаптивно-временной обработки необходим для выделения полезного сигнала на фоне помех или в гидрологических условиях, ослабляющих уровень полезного сигнала.
Предложенный способ экспериментально обоснован.
Результаты экспериментальных исследований
Для проведения экспериментальных исследований была выбрана центральная часть Уссурийского залива, представленная на фиг. 1. Уссурийский залив занимает северо-восточную часть залива Петра Великого. С северо-запада он ограничен полуостровом Муравьев-Амурский, островом Русский и островами, лежащими к юго-западу от острова Русский (см. фиг. 1).
Уссурийский залив - крупный внутренний залив у северного берега залива Петра Великого Японского моря. Входные мысы - мыс Маячный на острове Шкота на западе и мыс Сысоева (Шкотовский район) на востоке. Длина - 51 км, ширина у входа - 42 км, глубина - до 67 м. Площадь поверхности - 1154 км². Метеорологический режим Уссурийского залива, определяют муссонная циркуляция атмосферы, географическое положение района, циклоны, тайфуны, воздействие холодного Приморского течения.
Среднее годовое количество осадков Уссурийского залива составляет - 700-750 мм. Атмосферные осадки в пределах всей прибрежной зоны минимальны в декабре-феврале (10-18 мм). На летний период приходится 85 % годовой суммы осадков и в августе в среднем выпадает 145 мм.
Наибольшее количество осадков приходится на август месяц. В осенние месяцы (октябрь-ноябрь) выпадение осадков вдоль побережья Уссурийского залива уменьшается.
Средняя годовая температура воздуха равна примерно 6°C. Влажность воздуха на акватории Уссурийского залива характеризуется повышенными значениями, изменчивость которых находится в зависимости от типа атмосферной циркуляции (зимний и летний муссон, переходные периоды), погодных условий, времени суток и географического положения района.
Во время зимних муссонов, с октября-ноября по март преобладают северные и северо-западные ветра. В это время средние месячные значения скорости по многолетним данным максимальны в районе отдельных островов и мысов южной части акватории (9-12 м/с) и минимальны в северной, более закрытой части залива (2-3 м/с). Средняя годовая скорость ветра меняется от 1 м/с. В отдельные дни скорость ветра может достигать 40 м/сек. В летний период средняя месячная скорость ветра меньше, чем в зимний.
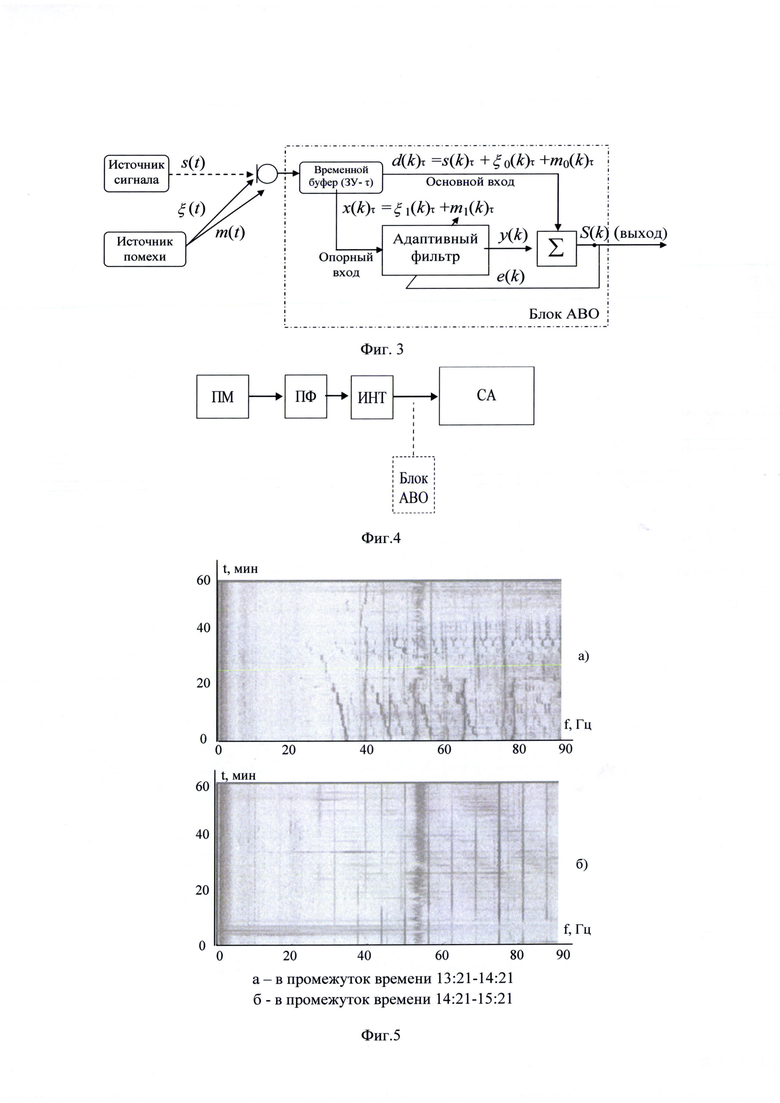
На фиг. 2. представлена схема размещение подводных модулей (ПМ), маршрут движения морского подводного объекта при проведении экспериментальных исследований. Морской подводный объект двигался по указанному маршруту со скоростью хода 1 м/с.
При проведении исследований производилась одновременная запись шумов морской акватории и шумоизлучения морского подводного объекта на ненаправленное приемное устройство.
Для обработки полученных в ходе проведения экспериментальных исследований записей, в качестве анализируемых сигналов помехи выбирались сигналы с ПУ ПМ-2 на временном интервале с 13:21-14:21, а сигнала с помехой 14:21-15:21, когда морской подводный объект выполнял движение по маршруту, показанному прерывистой линией от точки 1 до точки 2 (см. фиг. 2).
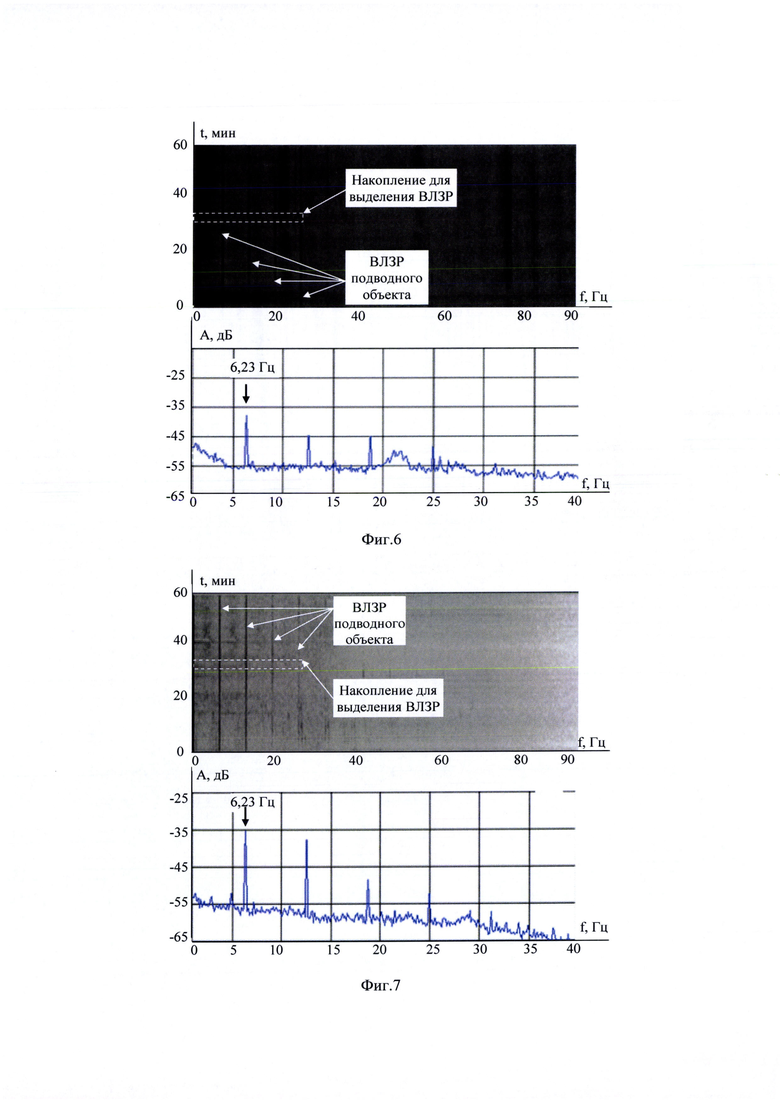
На следующем этапе исследования была разработана схема адаптивно-временной обработки, основой которой является блок адаптивно-временной обработки с нерекурсивным адаптивным фильтром, типа LMS и временным буфером, фиг. 3.
Как показано на фиг. 3 отличительной особенностью адаптивно-временной обработки сигнала является наличие в схеме обработки временного буфера с параметром - τ. В начале работы схемы на приемное устройство поступает амплитудно-частотная характеристика шумового поля водного пространства в виде суммы двух помех ξ(t) и m(t), которая записывается в 1-ую ячейку памяти временного буфера. По истечении времени записи помехи, определяемого параметром - τ, эта ячейка подключается через электронный ключ к опорному входу адаптивного фильтра (АФ), куда поступает сумма двух помех ξ1(k)τ и m1(k)τ, в виде сигнала x(k). По истечении времени τ в следующий момент времени при вероятном появлении морского подводного объекта s(t) в области действия приемного устройства через временной буфер и электронный ключ на основной вход АФ подается АЧХ смеси полезного сигнала s(k)τ и сумма помех ξ0(k)τ и m0(k)τ, со 2-ой ячейки памяти временного буфера, также в течение времени τ.
Помехи ξ0(k)τ и ξ1(k)τ имеют общий источник и, следовательно, коррелированы между собой и отличаются лишь тем, что приходят на основной и опорный вход в разные временные промежутки, определяемые временем стационарности помехи. Помехи m1(k)τ и m0(k)τ не коррелированы друг с другом, а также с сигналом s(t) и с помехами ξ0(k)τ и ξ1(k)τ. В адаптивном фильтре обрабатываются предварительно дискретизированные сигналы. Сигналы на основном и опорном входе преобразуются в сигналы d(k) = s(k)+ ξ0(k) + m0(k) и x(k) = ξ1(k) + m1(k) соответственно.
Помеха в опорном входе проходит через адаптивный фильтр, а затем вычитается из смеси сигнала и помехи в основном входе. При этом эффективность компенсации помех будет определяться степенью коррелированности помех на основном и опорном входах, которое будет определяться временем стационарности помеховой составляющей. Помехи, не коррелированные между собой останутся не скомпенсированными. Адаптивный алгоритм компенсации коррелированной части аддитивной помехи производился по алгоритму, реализующему критерий максимума отношения сигнал/помеха на выходе адаптивного фильтра.
При отсутствии морского подводного объекта в области действия приемного устройства на выходе адаптивного фильтра в схеме последетекторной обработки не произойдет выделение дискретных составляющих (ДС) в амплитудной огибающей (АО) сигнала шумоизлучения или выделения проходной характеристики морского подводного объекта. После чего через электронный ключ записанный сигнал во 2-ую ячейку памяти временного буфера перемещается в 1-ую ячейку и представляет собой помеху, а во вторую ячейку памяти происходит запись сигнала в следующее время, определяемое параметром τ. Так будет последовательно происходить процесс адаптивно-временной обработки, до момента срабатывания схемы обнаружения.
Далее полученные реализации сигналов обрабатывались с использовании классической схемы типового тракта обнаружения и по схеме предлагаемого способа, как показано на фиг. 4, где ПМ - приемный модуль, (ПФ) - полосовой фильтр, (ИНТ) - интегратор, блок АВО - блок адаптивно-временной обработки с нерекурсивным адаптивным фильтром типа LMS, и временным буфером, СА - спектроанализатор.
На фиг. 5 представлены сонограммы несущих записей сигналов с ненаправленного ПУ ПМ-2 в промежутки времени 13:21-14:21 и 14:21-15:21соответственно.
Из анализа сонограмм, представленных на фиг. 5 видно, что в низкочастотной области до 100 Гц, проявляется большое количество дискретных составляющих, при этом на сонограмме в промежуток времени с 14 ч 21 минуты (фиг. 5б) видно, что проявляется интерференционная картина, возможно характеризующая движение морского подводного объекта.
Проведенные расчеты амплитудной огибающей (АО) сигнала в полосе частот от 20 до 100 Гц, с помощью квадратурного амплитудного детектора, показали, что происходит выделение дискретных составляющих (ДС) как вально-лопастного звукоряда (ВЛЗР) морского подводного объекта, так и дискрет, затрудняющих его выделение.
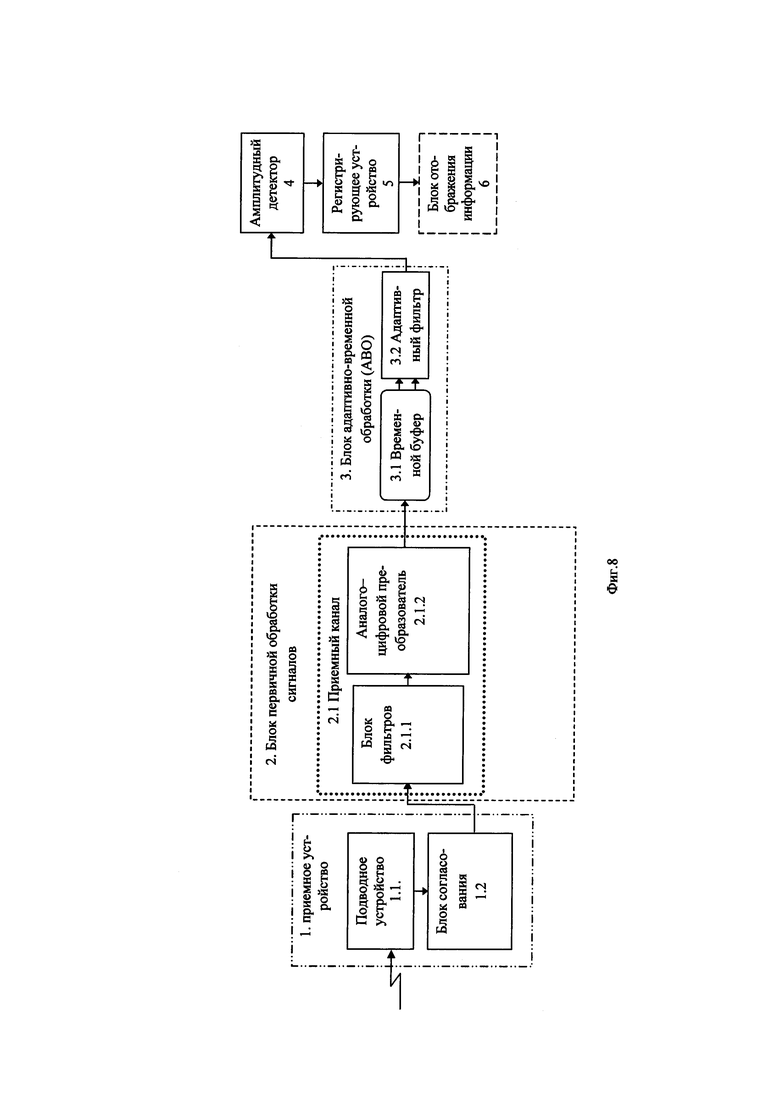
На фиг. 6 представлены сонограмма и спектр огибающей записей сигнала с ПУ ПМ-2, после классической схемы обработки, без применения блока адаптивно-временной обработки.
Из анализа сонограмы и накопленного за 200 сек. спектра огибающей записи сигнала с ПУ ПМ-2 (участок выделен белым квадратом) видно, что на ПМ-2 происходит выделение вально-лопастного звукоряда (ВЛЗР) морского подводного объекта при соотношении сигнал\помеха дискретных составляющих (ДС) ВЛЗР на 8-16 дБ.
На фиг. 7 представлены сонограмма и спектр огибающей записей сигнала с ПУ ПМ-2 после включения блока адаптивно-временной обработки с адаптивным фильтром типа LMS и временным буфером.
Из анализа сонограмы и накопленного за 200 сек. спектра огибающей записи сигнала с ПУ ПМ-2 видно, что на ПМ-2 происходит выделение вально-лопастного звукоряда морского подводного объекта при соотношении сигнал\помеха ДС от 12 до 21 дБ.
Оценка результатов полученных при проведении экспериментальных исследований осуществлялась путем измерения отношения «сигнал+помеха» или превышение уровня сигнала шумоизлучения морского подводного объекта над уровнем сплошной части спектра (СЧС) при применении фильтрации сигнала шумоизлучения, основанной на нерекурсивном адаптивном фильтре, типа LMS с временным блоком.
Анализ сонограмм и спектров огибающих записей сигналов без применения и после применения блока адаптивно-временной обработки (фиг. 6, 7) показывает, что адаптивно-временная обработка позволяет выделить вально-лопастной звукоряд подводного объекта и подавить фоновую помеху моря, оказывающую мешающее воздействие на приемные устройства и повысить соотношение сигнал/помеха уровня дискретных составляющих вально-лопастного звукоряда на 4-6 дБ от уровня дискретных составляющих без блока адаптивно-временной обработки.
На фиг. 8 представлена функциональная схема устройства для регистрации шумоизлучения морских подводных объектов.
На схеме представлено:
1. Приемное устройство
1.1 Подводное устройство
1.2 Блок согласования
2. Блок первичной обработки сигналов
2.1 Приемный канал
2.1.1 Блок фильтров
2.1.2 Аналого-цифровой преобразователь
3. Блок адаптивно-временной обработки (АВО)
3.1 Временной буфер
3.2 Адаптивный фильтр (АФ)
4. Амплитудный детектор
5. Регистрирующее устройство
6. Блок отображения информации
Все конструктивные элементы в приемом устройстве 1, в блоке первичной обработки сигналов 2, в блоке адаптивно-временной обработки сигналов 3, а также в амплитудном детекторе 4, регистрирующем устройстве 5 и блоке отображения информации 6 соединены электрическими связями.
В качестве устройства для приема сигнала, в блоке приемного устройства 1 сформировано подводное устройство 1.1, принимающий электроакустический элемент с возможностью приема акустических сигналов в водной среде, выход которого последовательно соединен с входом блока согласования, служащего для согласования принятых подводным устройством акустических сигналов в электрические для передачи на вход блока фильтров 2.1.1, входящего в состав приемного канала 2.1, блока первичной обработки сигналов 2.
В блоке первичной обработки сигналов 2 выход блока фильтров 2.1.1, последовательно соединен с входом аналого-цифрового преобразователя 2.1.2 для возможности пропускания передающегося электрического сигнала оптимальной полосы частот. Выход аналого-цифрового преобразователя 2.1.2 последовательно соединен с входом временного буфера 3.1 блока адаптивно-временной обработки 3, в котором на 1-ую ячейку памяти временного буфера 3.1 записывается амплитудно-частотная характеристика шумового поля водного пространства. По истечении времени записи, определяемого временным параметром, эта ячейка подключается через электронный ключ к опорному входу адаптивного фильтра 3.2 блока адаптивно-временной обработки 3. В следующий момент времени при вероятном появлении морского подводного объекта в области действия приемного устройства через временной буфер 3.1 и электронный ключ на основной вход АФ 3.2 подается АЧХ смеси со 2-ой ячейки памяти временного буфера 3.1 для выделения АЧХ морского подводного объекта. Выход адаптивного фильтра блока адаптивно-временной обработки 3 соединен с входом амплитудного детектора 4. Выход амплитудного детектора 4 соединен с входом регистрирующего устройства 5. Регистрирующее устройство 5 использовано для регистрации и документирования данных. Кроме того, выход регистрирующего устройства 5 соединен с входом блока отображения информации 6 с возможностью визуального отображения обработанного сигнала.
Осуществление способа
Для осуществления заявленного способа устройство регистрации уровня шумоизлучения морского подводного объекта снабжено общепринятым переносным или стационарным источником питания, расположенным на береговом посту.
При работе подводного устройства 1.1, в качестве которого использован электроакустический элемент, широко используемый в гидроакустике, расположенный в определенной точке подводного пространства акватории, принимает со всех направлений подводного пространства амплитудно-частотную характеристику (АЧХ) шумового поля водного пространства. Принимаемая АЧХ шумового поля водного пространства через блок согласования 1.2 приемного устройства 1, поступает на последовательно соединенный приемный канал 2.1 блока первичной обработки сигналов 2, включающий последовательно соединенные блок фильтров 2.1.1 и аналого-цифровой преобразователь 2.1.2, для пропускания электрических сигналов оптимальной полосы частот и преобразования их в цифровой вид для последовательной передачи на вход временного буфера 3.1 и далее на опорный вход адаптивного фильтра 3.2 блока адаптивно-временной обработки (АВО) 3. При прохождении морского объекта в области расположения приемного устройства сформированная АЧХ смеси с выхода аналого-цифрового преобразователя 2.1.2 приемного канала 2.1. блока первичной обработки сигналов 2 поступает на вход временного буфера 3.1 блока адаптивно-временной обработки 3, с которого сигналы поступают на основной вход адаптивного фильтра 3.2, блока адаптивно-временной обработки 3, в котором производится выделение полезного сигнала.
После обработки в блоке адаптивно-временной обработки 3 выделенная АЧХ морского подводного объекта из смеси полезного сигнала и помехи, подается на вход амплитудного детектора 4 для выделения амплитудной огибающей (АО).
Далее продетектированный сигнал поступает на вход регистрирующего устройства 5 для регистрации и документирования полученных в результате измерений данных. Визуальное наблюдение принятого акустического сигнала происходит в блоке отображения информации 6.
После на экране блока отображения информации 6 наблюдается АЧХ морского подводного объекта.
Заявленный способ представляет значительный интерес для народного хозяйства, так как реализуемое данным способом устройство обеспечивает охрану биологических и мобильных техногенных морских подводных объектов. Заявленное решение не оказывает отрицательного воздействия на экологическое состояние окружающей среды.
Таким образом, заявленный способ «Способ регистрации шумоизлучения морского подводного объекта» является новым способом для оценки уровня шумоизлучения морского подводного объекта.
Заявленный способ обладает следующими достоинствами:
- возможность получения более точных (корректных) данных уровня шумоизлучения морского подводного объекта. Данное достоинство способствует качественному решению задач по измерению и нормированию шумности морского подводного объекта, а также более вероятному обнаружению морского подводного объекта.
Заявленный способ промышленно применим, так как для его осуществления используются широко распространенные компоненты и изделия радиотехнической промышленности и вычислительной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регистрации малошумного морского объекта с использованием медианной фильтрации | 2016 |
|
RU2616357C1 |
| СПОСОБ РЕГИСТРАЦИИ МАЛОШУМНОГО МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2572052C2 |
| Способ регистрации уровня шумоизлучения морского объекта | 2017 |
|
RU2659186C1 |
| Способ регистрации шумоизлучения морского объекта | 2020 |
|
RU2746342C1 |
| Способ регистрации проходной характеристики морского объекта | 2021 |
|
RU2774731C1 |
| Способ регистрации проходной характеристики морского объекта в мелководной акватории | 2022 |
|
RU2786039C1 |
| Обнаружитель движущихся подводных объектов на фоне биологического шума мелководной акватории, где обитают раки-щелкуны | 2021 |
|
RU2779380C1 |
| Способ взаимодействия подводного аппарата с обеспечивающим судном | 2021 |
|
RU2781165C1 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ ОБНАРУЖИТЕЛЬ ДВИЖУЩЕГОСЯ ПОДВОДНОГО ОБЪЕКТА | 2011 |
|
RU2474881C1 |
Изобретение относится к области гидроакустики, а именно к способу регистрации шумоизлучения морского подводного объекта. Техническим результатом изобретения является способ регистрации шумоизлучения морского подводного объекта в широкой полосе частот в условиях повышенного уровня и нестационарности фоновых шумов (помех) в пределах времени регистрации прохода морского подводного объекта. Согласно изобретению способ регистрации шумоизлучения морского подводного объекта заключается в том, что сначала в приемном устройстве регистрируют амплитудно-частотную характеристику (АЧХ) шумового поля водного пространства, затем ее используют для последующей обработки в блоке первичной обработки сигналов. Далее во время регистрации морского подводного объекта в водном пространстве в области расположения приемного устройства формируют АЧХ смеси сигнала шумоизлучения морского подводного объекта и помехи шумового поля водного пространства (АЧХ смеси), после АЧХ смеси подают на вход блока первичной обработки сигналов и используют для последующей обработки. Принципиальным отличием от прототипа является то, что АЧХ шумового поля водного пространства подают на вход временного буфера и далее на опорный вход последовательно соединенного с ним адаптивного фильтра дополнительно введенного блока адаптивно-временной обработки. После этого АЧХ смеси подают на вход временного буфера и далее на основной вход адаптивного фильтра блока адаптивно-временной обработки, затем выделенную АЧХ морского подводного объекта через амплитудный детектор подают на регистрирующее устройство, где регистрируют АЧХ морского подводного объекта. 8 ил.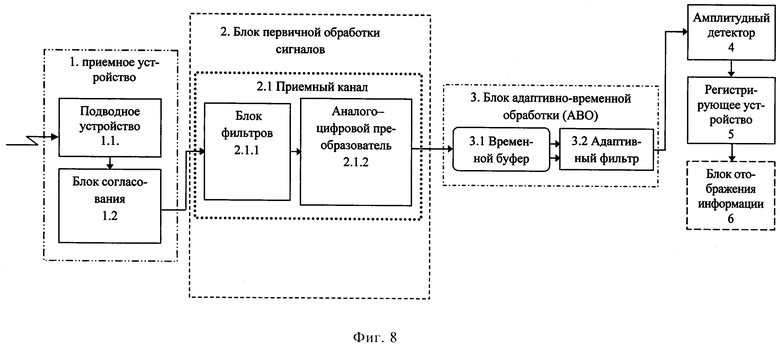
Способ регистрации шумоизлучения морского подводного объекта, заключающийся в том, что сначала в приемном устройстве регистрируют амплитудно-частотную характеристику (АЧХ) шумового поля водного пространства, затем ее используют для последующей обработки в блоке первичной обработки сигналов, далее во время регистрации морского подводного объекта в водном пространстве в области расположения приемного устройства формируют АЧХ смеси сигнала шумоизлучения морского подводного объекта и помехи шумового поля водного пространства (АЧХ смеси), после АЧХ смеси подают на вход блока первичной обработки сигналов и используют для последующей обработки, отличающийся тем, что АЧХ шумового поля водного пространства подают на вход временного буфера и далее на опорный вход последовательно соединенного с ним адаптивного фильтра дополнительно введенного блока адаптивно-временной обработки; после этого АЧХ смеси подают на вход временного буфера и далее на основной вход адаптивного фильтра блока адаптивно-временной обработки, затем выделенную АЧХ морского подводного объекта через амплитудный детектор подают на регистрирующее устройство, где регистрируют АЧХ морского подводного объекта.
| Способ регистрации уровня шумоизлучения морского объекта | 2017 |
|
RU2659186C1 |
| СПОСОБ РЕГИСТРАЦИИ МАЛОШУМНОГО МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2572052C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ЦЕЛЕЙ, ВЫЗВАННЫХ СОБСТВЕННЫМИ ПОМЕХАМИ ПОДВИЖНОГО НОСИТЕЛЯ | 2012 |
|
RU2514154C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, ОПРЕДЕЛЕНИЯ КООРДИНАТ И СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2564385C1 |
| US 6335905 B1, 01.01.2002. | |||

