Изобретение относится к способам экспериментального определения аэродинамических характеристик по данным летного эксперимента.
В частности определение величин аэродинамических коэффициентов лобового сопротивления  и
и  , для каждого момента времени, для которых выполнены записи летных параметров. Величина скорости полета замеряется аппаратными и приборными средствами.
, для каждого момента времени, для которых выполнены записи летных параметров. Величина скорости полета замеряется аппаратными и приборными средствами.
Общеизвестным недостатком определения аэродинамических и летных характеристик реальных воздушных судов в аэродинамической трубе, является получение точных значений коэффициентов аэродинамических сил, моментов, определения зависимости данных коэффициентов управления от параметров полета и отклонения управляющих поверхностей экспериментальным методом, невозможность точного расчета максимального значения располагаемой мощности (или тяги) работающего в меняющихся окружающих условиях маршевого двигателя, следовательно, невозможность достоверного определения реальных летных характеристик самолета.
Для задачи определения аэродинамических коэффициентов самолета наиболее полезна модель продольного движения, имеющая 3 степени свободы (линейное горизонтальное продольное движение, линейное вертикальное движение и угловое движение вокруг оси Z- движение по тангажу), позволяющая получить аэродинамические коэффициенты силы лобового сопротивления и подъемной силы в зависимости от угла атаки.
Указанные выше летные характеристики определяют набор данных о текущих располагаемых возможностях самолета, достаточный для обоснованного выбора дальнейшего режима полета как при ручном, так и автоматическом управлении. Идея реконструкции аэродинамической модели самолета и последующего определения его летных характеристик на основе замеренных кинематических параметров при совершении определенных маневров в полете была предложена еще в 1950 г.
Известен способ (Bruma J.H. Evaluation of a method to extract performance data from dynamic manoeuvers for a jet transport aircraft. ICAS proceedings, 1978, v.2, p.475-488) «Способ определения аэродинамических характеристик воздушных судов», заключающийся в исследовании модели воздушного судна в аэродинамической трубе и проведение летных испытаний. В процессе исследования модели воздушного судна в аэродинамической трубе измеряют параметры потока воздуха в аэродинамической трубе, угловое положение модели относительно потока воздуха, угловые отклонения поверхностей управления воздушным судном, аэродинамические силы и моменты, действующие на модель воздушного судна в различных конфигурация. В результате обработки полученных данных при совершении маневров самолетом получают зависимости составляющих коэффициентов аэродинамических сил и моментов от угла атаки, углов отклонения управляющих поверхностей и числа Маха. Для получения данных на самолете устанавливаются инерциальные датчики для замера ускорений, угловых скоростей, датчики воздушного давления для определения воздушной скорости.
Для фиксированного числа экспериментальных полетов и полученных в летных испытаниях данных предлагается оптимальный набор заданных функций, что не гарантирует его оптимальность для режимов, не вошедших в набор испытательных полетов.
Наиболее близким по технической сущности к предлагаемому техническому решению является «Способ определения аэродинамических характеристик воздушных судов» RU 2460982 C1, МПК G01M 9/00, заявка 2011111319/28 от 28.03.2011 г., опубликовано 10.09.2012 г. Бюл. №25.
Способ определения аэродинамических характеристик воздушных судов, заключается в исследовании модели воздушного судна в аэродинамической трубе и проведение летных испытаний. В процессе исследования модели воздушного судна в аэродинамической трубе измеряют параметры потока воздуха в аэродинамической трубе, угловое положение модели относительно потока воздуха, угловые отклонения поверхностей управления воздушным судном, аэродинамические силы и моменты, действующие на модель воздушного судна в различных конфигурациях. В результате обработки полученных данных получают продувочные зависимости составляющих коэффициентов аэродинамических сил и моментов, при проведении летных испытаний воздушных судов в дискретные моменты времени измеряют и регистрируют параметры движения: высоту, скорость полета, температуру заторможенного потока наружного воздуха, углы атаки и скольжения, угловое положение относительно поверхности Земли, угловые скорости и ускорения, перегрузки, измеряют параметры, позволяющие определить массово-инерционные характеристики воздушного судна. Кроме того, измеряют углы отклонения поверхностей управления и параметры, необходимые для вычисления составляющих тяги двигателей, значений коэффициентов аэродинамических сил и моментов, действующих на воздушное судно в фактических условиях полета в дискретные моменты времени.
На основе полученных значений коэффициентов аэродинамических сил и моментов с применением методов идентификации, в том числе и по методу наименьших квадратов, с использованием заданных функций для построения структурной или конструкционной матрицы, определяют зависимости этих коэффициентов от параметров полета и отклонений поверхностей управления.
Недостатком данного технического решения является исключительная сложность способа определения аэродинамических и летных характеристик реальных воздушных судов в аэродинамической трубе, заключающаяся в получении точных значений коэффициентов аэродинамических сил моментов, определения зависимости данных коэффициентов управления от параметров полета и отклонения управляющих поверхностей экспериментальным методом, невозможности точного расчета максимального значения располагаемой мощности (или тяги) работающего в меняющихся окружающих условиях маршевого двигателя, следовательно, невозможность достоверного определения реальных летных характеристик самолета на всех режимах полета, что в целом снижает эффективность способа.
Решаемой технической задачей изобретения является повышение достоверности определения основных упомянутых выше располагаемых летных характеристик летательного аппарата. Кроме того изобретение предусматривает учет положения двигателя относительно продольной оси самолета (двигатель не обязательно должен находится строго вдоль продольной оси). Вектор силы тяги двигателя можно задать произвольно в соответствии с проектно-конструкторской документацией. Таким образом, возможно определение аэродинамических характеристик аппаратов типа Bell V-22 Osprey (аппарат, сочетающий отдельные преимущества самолета и вертолета).
Уравнение линейных перемещений самолета в пространстве, имеет вид:

где  - вектор вторых производных от перемещений в неподвижной системе координат, G - вектор ускорения силы тяжести, P-вектор силы тяги двигателя и других сил связанных с планером самолета, RA - вектор аэродинамических сил, m - масса самолета, M-1 - обратные матрицы поворота необходимые для определения проекций сил заданные с системе координат самолета или скоростной системе координат на земную систему координат, среди необходимых углов поворота, γ - угол крена, ϑ - угол тангажа, ψ - угол курса самолета, Θ - угол наклона траектории, Ψ - угол направления горизонтального движения.
- вектор вторых производных от перемещений в неподвижной системе координат, G - вектор ускорения силы тяжести, P-вектор силы тяги двигателя и других сил связанных с планером самолета, RA - вектор аэродинамических сил, m - масса самолета, M-1 - обратные матрицы поворота необходимые для определения проекций сил заданные с системе координат самолета или скоростной системе координат на земную систему координат, среди необходимых углов поворота, γ - угол крена, ϑ - угол тангажа, ψ - угол курса самолета, Θ - угол наклона траектории, Ψ - угол направления горизонтального движения.
Зная расположение записывающего устройства и его акселерометров на борту (оси чувствительности акселерометров параллельны строительным осям самолета), можно определить показания продольного акселерометра (направление чувствительности которого совпадает с направлением продольной строительной оси самолета) и нормального акселерометра (направление чувствительности которого перпендикулярно строительной оси самолета).
В системе управления использовался гироблок модели MTi-300 AHRS. Серия MTi-100 - это высокопроизводительная линейка продуктов из портфеля продуктов MTi с точностью, превосходящей традиционные MEMS AHRS, благодаря использованию превосходных гироскопов и нового оптимизирующего фильтра, выходящего за рамки (расширенных) реализаций фильтра Калмана. МТi-300 AHRS является гироскопом курсовертикали, выводящим данные по крену, тангажу и истинному/магнитному северному курсу без дрейфа. В данном случае прибор использовался для измерения углов рыскания, тангажа и крена, проекций угловых скоростей и ускорений на оси системы координат, связанной с прибором.
Однако современные технические средства (микромеханические гироприборы) в массе своей являются датчиками абсолютной угловой скорости, в связи с чем в эксперименте необходимо производить запись не углового ускорения, а угловой скорости самолета. Поэтому расчет углового ускорения выполняется методом конечных разностей.
Запись полетных данных ведется на борту самолета и соответственно происходит в отличной от земной системы координат. Для того чтобы выразить получаемые данные в аналитическом виде необходимо полученные в земной системе координат умножить на матрицы поворота позволяющие перейти в строительную систему координат самолета:

С учетом предыдущего выражения получим:

помня, что  - это результаты измерений, RA - искомые аэродинамические силы можно, аналогично задачи продольного движения, превратить это выражение в систему линейных уравнений:
- это результаты измерений, RA - искомые аэродинамические силы можно, аналогично задачи продольного движения, превратить это выражение в систему линейных уравнений:
где А - матрица коэффициентов, В - вектор правых частей содержащих результаты измерений имеют следующий вид:


Следует обратить внимание, на то, что прямые и обратные матрицы поворотов не являются перестановочными и поэтому заменить присутствующие в произведениях пары прямых и обратных матриц поворота вокруг одной и той же оси на единичную матрицу нельзя. В системе уравнений не присутствуют в явном виде углы атаки и скольжения, что с одной стороны требует дополнительного их вычисления при обработке данных, с другой стороны облегчает использования в процессе летного эксперимента высокоточных навигационных систем RTK (RealTimeKinematic), которые в процессе штатной работы определяют только проекции истиной скорости на земную систему координат, что позволяет легко определять углы наклона траектории и горизонтального направления движения, а не углы атаки и скольжения.
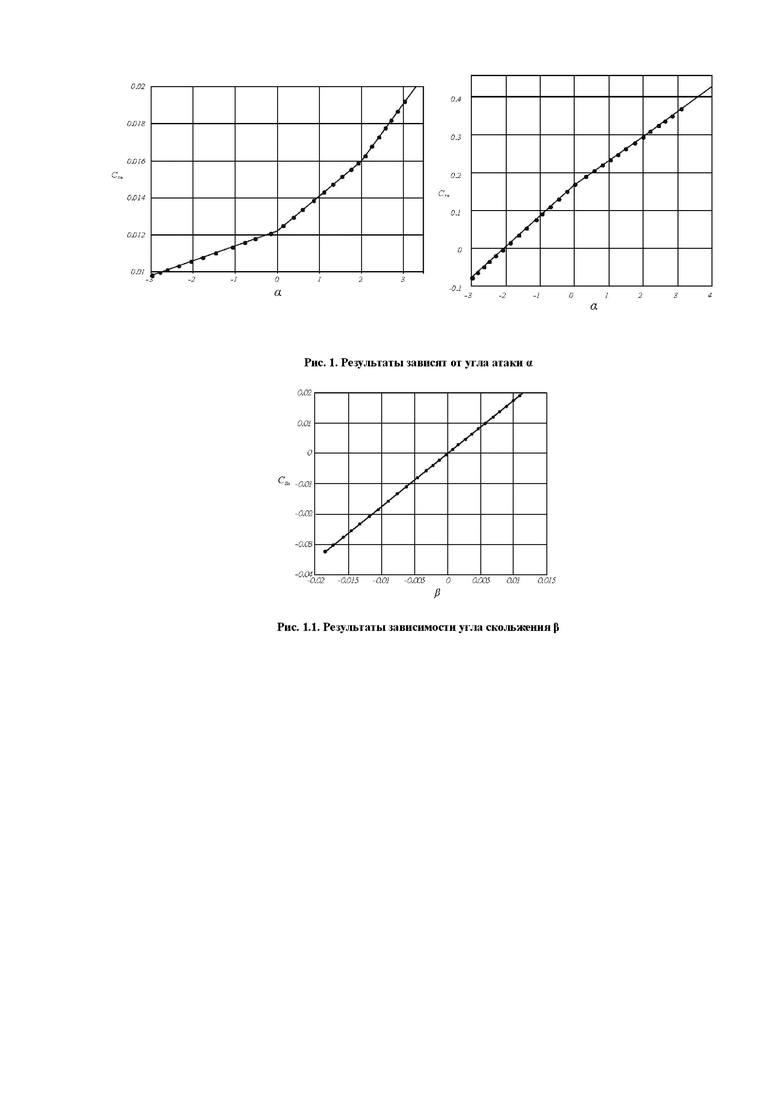
После определения аэродинамических сил можно вычислить коэффициенты лобового сопротивления по следующим формулам:
Результаты такого вычислительного эксперимента оказаны на рис. 1 и рис 1.1.
Предложенный алгоритм показал высокую точность определения аэродинамических коэффициентов в рамках предложенных математических моделей, что хорошо видно при сравнении аэродинамических коэффициентов, вычисленных по предлагаемому алгоритму, и заданных при проведении численного эксперимента. На рис. 1 и рис. 1.1 заданные коэффициенты обозначены линиями, а получившиеся в результате расчета - точками. Видно, что рассчитанные коэффициенты повторяют конечно-линейный характер заданных кривых.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2460982C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА ПО РЕЗУЛЬТАТАМ ИСПЫТАНИЙ | 2009 |
|
RU2419775C1 |
| Конвертоплан | 2019 |
|
RU2723516C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА ВЕКТОРА СИЛЫ ТЯГИ ГИПЕРЗВУКОВОГО ПРЯМОТОЧНОГО ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ С КОСЫМ СРЕЗОМ СОПЛА ПО РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙ ЕГО НА ГИПЕРЗВУКОВОЙ ЛЕТАЮЩЕЙ ЛАБОРАТОРИИ | 2010 |
|
RU2445599C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТНЫМ ЭКСПЕРИМЕНТОМ | 2012 |
|
RU2477521C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРОСОВОЙ СИСТЕМОЙ (САМОЛЕТ-БУКСИРОВЩИК - ТРОС - БУКСИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ) | 2007 |
|
RU2347719C1 |
| СПОСОБ НЕПАРАМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ НЕЛИНЕЙНЫХ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА ПО РЕЗУЛЬТАТАМ ЛЁТНЫХ ИССЛЕДОВАНИЙ | 2014 |
|
RU2560244C1 |
Изобретение относится к области экспериментальной аэродинамики, а именно к способам определения аэродинамических характеристик воздушных судов. При реализации способа характеристики определяются на текущий момент, текущих окружающих условий, для текущей аэродинамической конфигурации летательного аппарата на основе замеренных аппаратными средствами данных по скорости полета во время разгона летательного аппарата в горизонтальном полете, с учетом произвольного задания вектора тяги двигателя. Технический результат заключается в повышении достоверности определения основных упомянутых выше располагаемых летных характеристик летательного аппарата с учетом направления вектора тяги двигателя. 1 ил.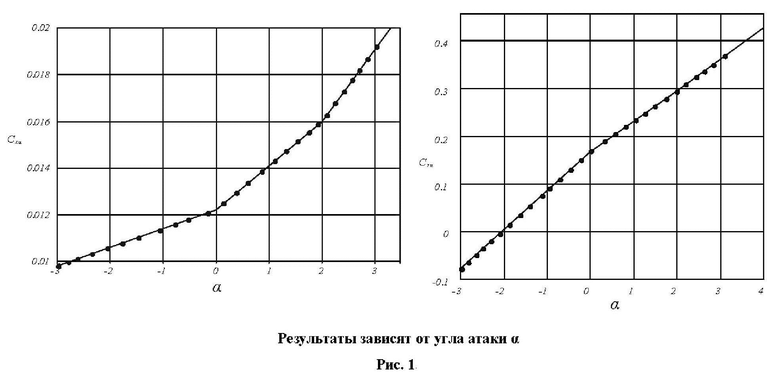
Способ определения коэффициента лобового сопротивления летательного аппарата (ЛА) при нулевой подъемной силе и последующего расчета основных летных характеристик летательного аппарата, достаточных для обоснованного выбора режима полета как при ручном, так и автоматическом управлении ЛА: отличающийся тем, что указанные аэродинамические и летные характеристики определяются на текущий момент, текущих окружающих условий, для текущей аэродинамической конфигурации летательного аппарата на основе замеренных аппаратными средствами данных по скорости полета во время разгона летательного аппарата в горизонтальном полете, с учетом произвольного задания вектора тяги двигателя.

