Настоящее изобретение относится к летательному аппарату, снабженному вспомогательным узлом полета.
Известны дистанционно пилотируемые летательные аппараты (RPA), общеизвестные как дроны. На английском языке известны и другие аббревиатуры: в дополнение к RPA (дистанционно пилотируемый летательный аппарат) они могут называться UAV (беспилотный летательный аппарат), RPV (дистанционно пилотируемое транспортное средство), ROA (летательный аппарат с дистанционным управлением) или UVS (беспилотная транспортная система).
Эти летательные аппараты характеризуются отсутствием человека на борту. Их полет управляется компьютером на борту летательного аппарата согласно дистанционному управлению штурмана или пилота на земле. Их использование в настоящее время консолидировано в военных целях и расширяется также для гражданских применений, например для предотвращения пожаров и борьбы с чрезвычайными ситуациями, в невоенных целях безопасности, для наблюдения за трубопроводом, для дистанционного зондирования и в исследовательских целях и, в целом, во всех случаях, когда такие системы могут допускать «скучную, грязную и опасную» миссии, зачастую по гораздо более низкой цене, чем традиционные летательные аппараты.
Дроны часто оснащаются спасательными устройствами, предназначенными для возвращения летательного аппарата в случае отказа. Например, в патенте US-6416019 описано устройство для возвращения парашютом для возвращения дрона без повреждений, обеспечивающее возможность безопасной неразрушающей посадки дрона в желаемом месте. Устройство для возвращения парашютом содержит парашют, сервосистему и электронную систему управления наведением. Парашют прямоугольной формы соединен множеством тросов управления с сервосистемой, которая, в свою очередь, управляется электронной системой управления. Электронная система управления и сервосистема используются для управления траекторией планирования и обеспечивают безопасную, неразрушающую посадку дрона. В частности, сервосистема выполнена с возможностью регулировки длины каждого троса из упомянутого множества тросов управления, соединенных с парашютом, для управления парашютом, чтобы изменять скорость и направление.
Однако такое устройство для возвращения с парашютом является сложным по своей реализации, поскольку оно работает с использованием большого количества тросов управления самого парашюта, а также не позволяет пилоту продолжать управлять дроном для выполнения миссии. Кроме того, нет уверенности в том, что он не пострадает от столкновения с препятствиями, и даже не будет представлять опасность для людей на земле.
Задача настоящего изобретения состоит в том, чтобы предложить устройство для возвращения, которое легко реализовать и которое обеспечивает безопасную посадку как для дрона, так и для людей на земле, а также позволяет пилоту продолжать выполняемую миссию.
Согласно изобретению, такая задача достигается посредством дистанционно управляемого летательного аппарата, как определено в пункте 1 формулы изобретения.
Верхнее крыло, и нижнее крыло обеспечивают полет летательного аппарата вместо воздушных винтов в случае отказа летательного аппарата или в случае аварийной ситуации.
Эти и другие признаки настоящего изобретения станут более очевидными из следующего подробного описания его практического варианта осуществления, показанного в качестве неограничивающего примера на прилагаемых чертежах, на которых:
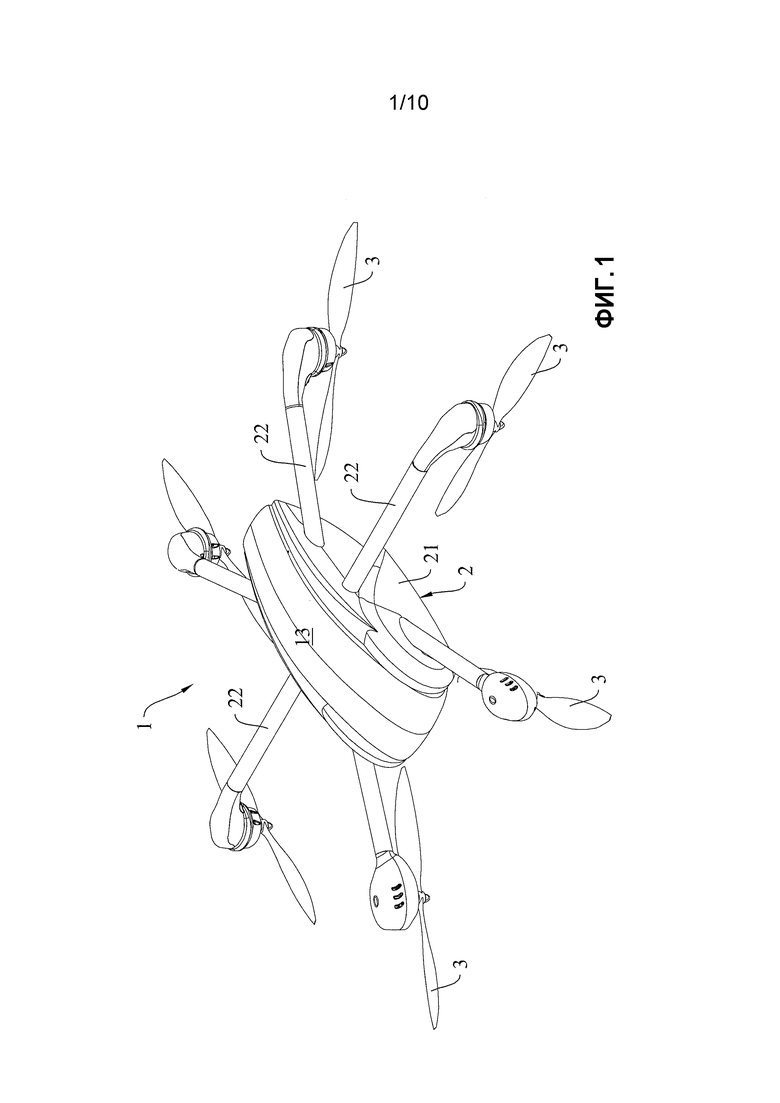
Фиг.1 показывает вид в аксонометрической проекции дистанционно управляемого летательного аппарата согласно настоящему изобретению;
Фиг.2 показывает второй вид в аксонометрической проекции летательного аппарата по фиг.1;
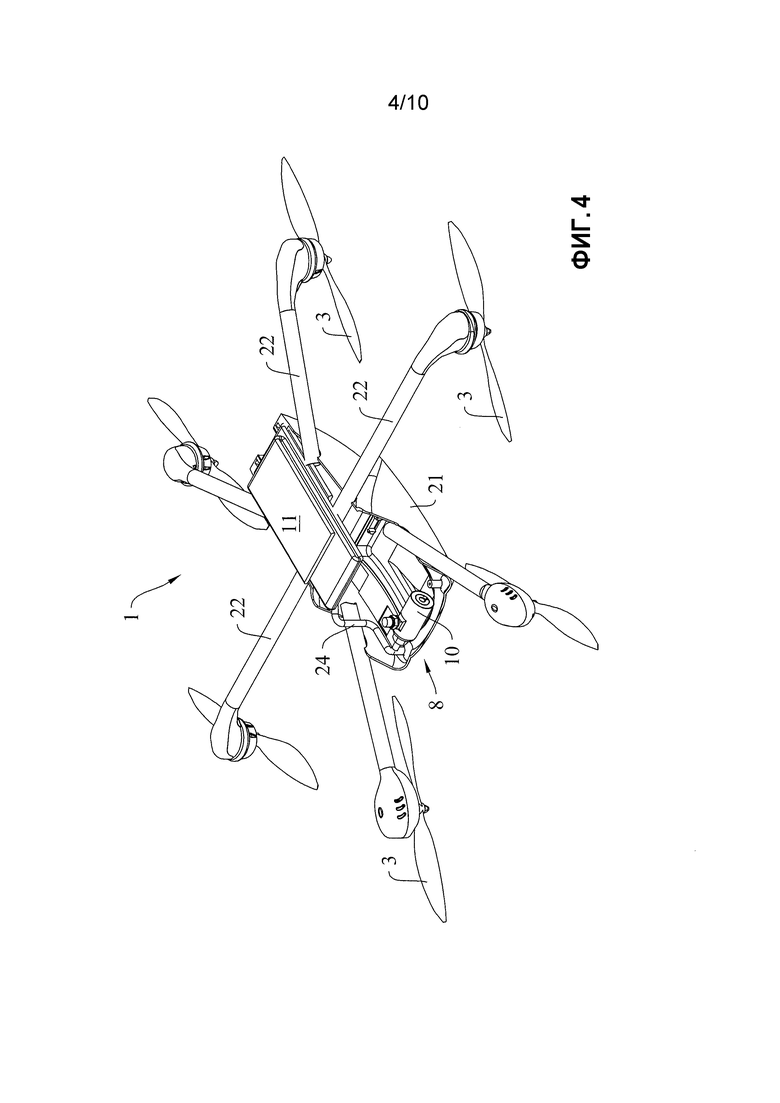
Фигуры 3 и 4 показывают вид летательного аппарата по фиг.1 без одного или нескольких участков каркаса;
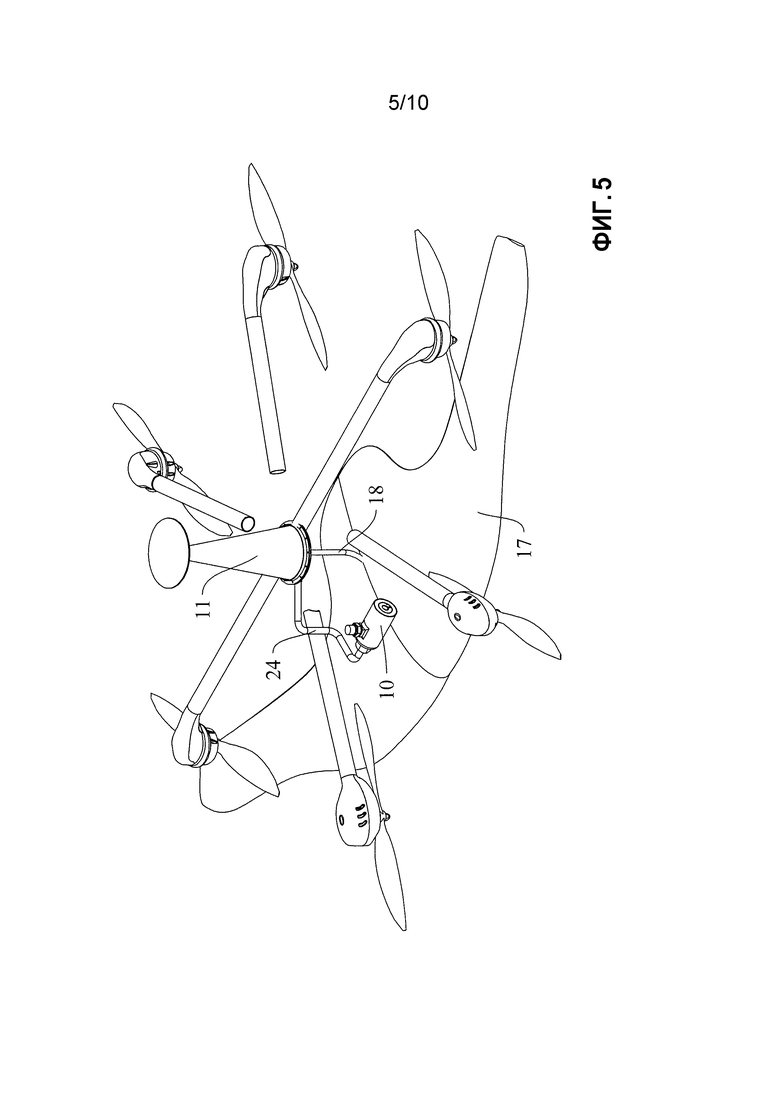
Фиг.5 показывает вид в аксонометрической проекции частичного сечения летательного аппарата по фиг.1 в конфигурации, принятой в случае отказа;
Фигуры 6-8 показывают виды летательного аппарата по фиг.1, в конфигурации, принятой в случае отказа летательного аппарата или в аварийной ситуации;
Фиг.9 показывает вид сбоку дистанционно управляемого летательного аппарата согласно настоящему изобретению, снабженного движущим винтом;
Фиг.10 показывает блок-схему вспомогательного узла полета, содержащегося в летательном аппарате по фиг.1.
Фиг.1 показывает дистанционно пилотируемый летательный аппарат (RPA) 1 согласно настоящему изобретению.
Летательный аппарат 1 содержит каркас 2, который является несущей конструкцией, причем возможно изготовить каркас 2 из различных материалов, в том числе пластмассы, алюминия или углерода. Как известно, состав каркаса 2 имеет решающее значение при определении прочности, веса и, следовательно, времени полета летательного аппарата 1. Таким же образом, размер каркаса 2 и, следовательно, его диаметр влияют на летные характеристики летательного аппарата 1: больший диаметр обеспечивает большую стабильность полета, но в то же время предполагает больший вес и, следовательно, большее потребление энергии. В предпочтительном варианте осуществления, каркас 2 содержит центральный корпус 21, от которого радиально отходит множество взаимно равноудаленных ветвей 22.
Летательный аппарат 1 содержит основную силовую установку 23 (фиг.11), которая, в свою очередь, содержит, по меньшей мере, один мотор, выполненный с возможностью вращения множества винтов 3. Например, летательный аппарат 1 может содержать множество моторов, каждый из которых расположен на одной из упомянутых ветвей 22, причем упомянутые моторы, каждый выполнен с возможностью вращения винта 3, что позволяет летательному аппарату 1 подниматься над землей. Моторы, установленные на дронах, представляют собой электрические моторы и, как правило, «бесщеточного» типа. В альтернативном варианте, летательный аппарат 1 может содержать один мотор, выполненный с возможностью вращения упомянутого множества винтов 3 посредством соответствующих элементов механической трансмиссии.
Прилагаемые чертежи показывают летательный аппарат 1, который содержит шесть винтов 3 (гексакоптер), но на летательном аппарате 1 может быть три мотора (трикоптер), четыре мотора (квадрокоптер), восемь моторов (октокоптер) и т.д.
Летательный аппарат 1 содержит основной блок управления, состоящий из контроллера, выполненного с возможностью приема команд от блока дистанционного управления и поддержания баланса летательного аппарата 1 в полете, среди прочего, посредством автоматического действия в соответствии с информацией, полученной из аппаратного и программного обеспечения, которым он оборудован. Блок дистанционного управления может представлять собой передатчик дистанционного управления, посредством которого удаленный пилот может управлять основной силовой установкой 23 и, следовательно, полетом летательного аппарата 1. В качестве альтернативы, блок дистанционного управления может быть наземной станцией или устройством, способным программировать автоматический полет.
Основной блок управления взаимодействует с инерциальным измерительным блоком, или IMU, который содержит набор электронных компонентов, таких как GPS-антенны, барометры, инерциальные измерительные приборы, такие как гироскопы и акселерометры, которые позволяют блоку управления улучшить реакцию на внезапные вариации факторов, которые записаны.
Основной блок управления выполнен с возможностью приема от упомянутого инерциального измерительного блока множества связанных с полетом данных, полученных на основе измерений, выполненных самим инерциальным измерительным блоком, и обработки их для определения осуществления одного или нескольких действий на летательном аппарате 1.
Основной блок управления дополнительно содержит, по меньшей мере, один приемник, выполненный с возможностью приема на вход команд от блока дистанционного управления основной силовой установки 23 для управления полетом летательного аппарата 1.
Кроме того, летательный аппарат 1 содержит вспомогательный узел 4 полета, выполненный с возможностью вмешательства в случае отказа летательного аппарата 1 или в случае аварийной ситуации.
Вспомогательный узел 4 полета содержит дополнительный блок 5 управления (фиг.10), состоящий из автономного блока управления, также выполненного с возможностью обработки данных, связанных с полетом, поскольку он снабжен дополнительным инерциальным измерительным блоком, содержащим множество датчиков 6, предназначенных для обнаружения ряда величин, среди которых, по меньшей мере, ускорение (линейное и угловое), которому подвергается летательный аппарат 1, и давление окружающей среды, в частности перепады давления, которые могут возникнуть вследствие внезапного изменения высоты полета летательного аппарата 1. В данном случае, дополнительный блок 5 управления выполнен с возможностью сравнения упомянутых величин, полученных от упомянутого дополнительного инерциального измерительного блока, с предельными значениями, которые идентифицируют состояние отказа летательного аппарата 1, чтобы распознать последний.
Вспомогательный узел 4 полета затем снабжен дополнительным приемником 27, выполненным с возможностью приема на вход команд, поступающих от дополнительного блока 70 дистанционного управления полетом летательного аппарата 1. Снова, дополнительный блок 70 дистанционного управления может быть передатчиком радиоуправления, наземной станцией или устройством, способным программировать автоматический полет. Например, в случае радиоуправления, дополнительный блок 70 дистанционного управления может быть встроен в само устройство вместе с блоком дистанционного управления.
Дополнительный блок 5 управления также выполнен с возможностью контроля уровня радиосигнала, который обеспечивает связь летательного аппарата 1 с блоком 70 дистанционного управления, например, наземной станцией управления (GCS), и сравнения упомянутого уровня радиосигнала с пороговым значением, которое идентифицирует аварийное состояние.
Кроме того, дополнительный блок 5 управления выполнен с возможностью распознавания аварийной команды посредством упомянутого блока 70 дистанционного управления, например, нажатия аварийной кнопки, которой снабжен блок 70 радиоуправления, неисправность датчиков 6 дополнительного инерциального измерительного блока или скорость вращения винтов 3, которая превышает заданный предел безопасности (так называемое «превышение предела винтокрылого летательного аппарата»).
Как более подробно описано ниже, в случае отказа летательного аппарата 1 или в случае аварийной ситуации, дополнительный блок 5 управления выполнен с возможностью формирования, в качестве ответа, команды S1 активации и одновременно команды S2 запрета для запрета основной силовой установке 23.
Вспомогательный узел 4 полета содержит первое устройство 8, выполненное с возможностью выбрасывания верхнего крыла 9, размещенного внутри первого отсека 12 (фиг.3) в верхней части центрального корпуса 21 летательного аппарата 1, причем упомянутое верхнее крыло 9 является маневренным посредством средства управления, соединенного с упомянутым дополнительным блоком 5 управления, причем упомянутое средство управления управляется упомянутым блоком 70 дистанционного управления.
Первым устройством 8 может быть, например, пневматическое пусковое устройство запасного парашюта, подобное тому, которое описано в патенте EP-0716015. В таком устройстве быстрый выпускной клапан открывается посредством команды и выпускает сжатый газ, хранящийся в небольшом резервуаре, снабженном манометром. Резервуар содержит воздух, азот или негорючие газы. Выброс газа мгновенно надувает расширительную камеру, которая при расширении придает прямолинейное движение с переменным ускорением парашюту, который отделяется, несмотря на то, что остается ограниченным конструкцией летательного аппарата, посредством множества тросов.
Аналогично, первое устройство 8 содержит резервуар 10 (фиг.4), внутри которого сжатая текучая среда хранится под высоким давлением (например, при давлении свыше 160 бар), причем упомянутый резервуар 10 снабжен быстродействующим выпускным клапаном, выполненным с возможностью электромеханической активации упомянутой командой S1 активации, формируемой дополнительным блоком 5 управления в случае отказа летательного аппарата 1 или в случае аварийной ситуации.
В случае отказа летательного аппарата 1 или в случае аварийной ситуации, упомянутый клапан выполнен с возможностью выпуска сжатой текучей среды, содержащейся в резервуаре 10, в расширительную камеру 11, которая сложена в виде сильфона внутри упомянутого первого отсека 12 летательного аппарата 1, посредством трубы 24, способной поддерживать создаваемое давление. Сильфонная расширительная камера 11 выполнена с возможностью быстрого надувания из-за высокого давления, создаваемого в ней резервуаром 10, принимая форму конуса (или резервуара) для выталкивания и развертывания верхнего крыла 9 (фиг.5). Первый отсек 12 расположен в верхней части летательного аппарата 1 и содержит закрывающую крышку 13 (фиг.1), шарнирно закрепленную на каркасе 2 летательного аппарата 1, причем упомянутая крышка 13 выполнена с возможностью открывания под мгновенным толчковым смещением изнутри расширительной камеры 11.
В частности, упомянутое верхнее крыло 9 выполнено из ткани или другого материала с гибкими свойствами и в основном состоит из двух полу усеченных конусообразных поверхностей 14 с двумя соединенными вершинами (фигуры 6-8). Крыло такого типа также известно под названием «крыло Рогалло». Упомянутое верхнее крыло 9 ограничено каркасом 2 летательного аппарата 1 посредством пары тросов 15, которые, в свою очередь, сгруппированы во множество тросов 16, соединенных с верхним крылом 9 по его периметру, причем упомянутое верхнее крыло 9 также предусматривает направляющий трос 19, выполненный с возможностью соединения, по меньшей мере, одной точки периметра верхнего крыла 9 с упомянутым средством управления. Средство управления выполнено с возможностью приложения тяги к упомянутому направляющему тросу 19 посредством дистанционной команды, получаемой от дополнительного блока 70 дистанционного управления, для деформации конструкции верхнего крыла 9 и, таким образом, для маневрирования, как будет объяснено более подробно ниже.
Вспомогательный узел 4 полета дополнительно содержит надувное нижнее крыло 17 (фиг.5), размещенное во втором отсеке 25 летательного аппарата 1, и которое выполнено с возможностью использования также в случае отказа летательного аппарата 1, причем упомянутое нижнее крыло 17 находится в сообщении по текучей среде с расширительной камерой 11 через выпускной канал 18; при этом второй отсек 25 расположен ниже центрального корпуса 21 летательного аппарата 1 и также содержит закрывающую крышку 26 (фиг.2). Нижнее крыло 17 надувается посредством текучей среды, ранее использовавшейся для надувания расширительной камеры 11. Действительно, расширительная камера 11 после вытеснения верхнего крыла 9 содержит тот же объем текучей среды, что и резервуар 10, расширенный при более низком давлении (например, при давлении 2 бар), причем упомянутая текучая среда течет к упомянутому выпускному каналу 18 и надувает нижнее крыло 17, которое благодаря приобретенному объему открывает закрывающую крышку 26 и располагается снизу летательного аппарата 1 (фиг.5).
Нижнее крыло 17 имеет форму для взаимодействия с верхним крылом 9 для обеспечения устойчивости летательного аппарата; таким образом, пилот может управлять маневром надлежащим образом. Другими словами, нижнее крыло имеет форму для взаимодействия с верхним крылом 9 для стабилизации полета летательного аппарата. Например, нижнее крыло 17 может иметь стандартизированный тип формы профиля, определенный Национальным консультативным комитетом по аэронавтике NACA. Кроме того, нижнее крыло 17 также действует как подушка безопасности, способная защищать наиболее причиняющие ущерб части летательного аппарата 1 от ударов предметов или людей.
В случае отказа летательного аппарата 1 или в случае аварийной ситуации, вспомогательный узел 4 полета, следовательно, выполнен с возможностью активации упомянутого первого устройства 8 для вытеснения верхнего крыла 9 и выполнен с возможностью надувания упомянутого нижнего крыла 17. В частности, дополнительный блок 5 управления выполнен с возможностью формирования упомянутой команды S1 активации, когда после сравнения данных, полученных от дополнительного инерциального измерительного блока (по меньшей мере, линейного и углового ускорения и давления окружающей среды) с этими предельными значениями, он распознает состояние отказа летательного аппарата 1, или когда уровень радиосигнала, который приводит летательный аппарат 1 в связь с дополнительным блоком 70 дистанционного управления, падает ниже предельного значения, которое идентифицирует аварийное состояние; упомянутая команда S1 активации также формируется, когда обнаруживается неисправность в дополнительном инерциальном измерительном блоке или когда скорость вращения винтов 3 превышает упомянутый заранее заданный предел безопасности. Дополнительный блок 5 управления выполнен с возможностью формирования упомянутой команды S1 активации также, когда он принимает аварийную команду от блока 70 дистанционного управления.
В то же время, что и команда S1 активации, дополнительный блок 5 управления выполнен с возможностью формирования упомянутой команды S2 запрета основной силовой установке 23 прерывания вращения винтов 3, чтобы гарантировать, что выбрасываемое верхнее крыло 9 само не запутается с винтами 3.
Верхнее крыло 9 и нижнее крыло 17 имеют такую форму, чтобы формировать непрерывный поворот летательного аппарата 1 (вправо или влево), в то время как посредством дистанционного вытягивания упомянутого направляющего троса 19 можно формировать условие прямолинейной траектории или условие разворота в противоположном направлении по сравнению с тем, которое сообщает верхнее крыло 9, посредством чего изменяется форма самого верхнего крыла 9. Легко понять, как упомянутые средства управления легко реализовать, поскольку они воздействуют на один трос (направляющий трос 19); это также означает большую безопасность, потому что одному тросу труднее запутаться с остальной частью конструкции верхнего крыла 9, когда оно открывается.
Вспомогательный узел 4 полета может содержать дополнительный движущий винт 20 (фиг.9), также управляемый блоком 70 дистанционного управления и работающий в плоскости, перпендикулярной оси крена летательного аппарата 1, причем упомянутый дополнительный движущий винт 20 формирует увеличение подъемной силы, позволяя летательному аппарату 1 продолжать миссию. Действие этого увеличения тяги также приведет к дальнейшему повышению устойчивости маневрирования летательного аппарата 1 с последующей способностью лететь по траекториям при наличии сильного встречного или бокового ветра.
Во время работы, когда блок управления обнаруживает состояние отказа летательного аппарата 1 или аварийную ситуацию, одновременно формируется команда S1 активации, предназначенная для активации упомянутого первого устройства 8 для вытеснения верхнего крыла 9 и надувания нижнего крыла 17, и команда S2 запрета, предназначенная для остановки основной силовой установки 23 летательного аппарата 1.
Как упомянуто, условие отказа обнаруживается путем сравнения данных полета и, в частности, таких величин, как, по меньшей мере, ускорение (линейное и угловое) и давление окружающей среды, с предельными значениями, которые идентифицируют состояние отказа, или обнаруживают аварийное состояние путем сравнения уровня радиосигнала дополнительным блоком 70 дистанционного управления с упомянутым предельным значением, которое идентифицирует аварийное состояние. Кроме того, упомянутая команда S1 активации и команда S2 запрета формируются дополнительным блоком 5 управления также в случае аварийной команды или в случае обнаружения сбоев в дополнительном инерциальном измерительном блоке или условий превышения допустимых пределов винтокрылого летательного аппарата.
Верхнее крыло 9 выталкивается благодаря открытию клапана для быстрого выпуска из резервуара 10, который, выпуская сжатую текучую среду внутрь расширительной камеры 11, первоначально сложенной в первом отсеке 12, вызывает это расширение для открытия крышки 13 первого отсека 12 и придает прямолинейное движение верхнему крылу 9, которое развертывается в воздухе, оставаясь при этом связанным с летательным аппаратом 1 посредством пары тросов 15 и их удлинителей (тросов 16).
После выталкивания первичного крыла, благодаря упомянутому выпускному каналу 18, объем текучей среды, содержащейся в расширительной камере 11, течет при более низком давлении внутрь нижнего крыла 17, тем самым, надувая его (фиг.5).
Как только вспомогательный узел 4 полета активирован, верхнее крыло 9 вместе с нижним крылом 17 формирует непрерывный поворот летательного аппарата 1 (вправо или влево), в то время как посредством блока 70 дистанционного управления, будет возможно формировать состояние прямолинейной траектории или состояние поворота в противоположном направлении относительно направления, сообщаемого верхним крылом 9, в результате чего изменяется форма верхнего крыла 9. Это осуществляется благодаря средствам управления, которые применяют тягу к направляющему тросу 19, чтобы деформировать конструкцию верхнего крыла 9, так что летательный аппарат 1 может продолжать маневрировать и продолжать начатую миссию, несмотря на сбой или аварийное состояние.
В случае дополнительного движущего винта 20, опять-таки, посредством дополнительного блока 70 дистанционного управления, также можно увеличить силу тяги летательного аппарата 1 и, следовательно, его маневренность, благодаря вспомогательному узлу 4 полета.
Летательный аппарат 1 будет оставаться совершенно маневренным благодаря синергетическому действию упомянутых верхнего и нижнего крыльев 9, 17, что позволяет справляться с возможным отказом летательного аппарата 1 или аварийной ситуацией контролируемым образом, которая является абсолютно безвредной для людей, находящихся под летательным аппаратом 1, при этом сам летательный аппарат 1 остается полностью управляемым.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕВРАЩЕНИЯ ВЕРТОЛЕТА В ПЛАНЕР В АВАРИЙНЫХ СИТУАЦИЯХ И НАДУВНОЕ КРЫЛО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2699950C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| УПРАВЛЯЕМАЯ ПАРАПЛАННАЯ СИСТЕМА | 2008 |
|
RU2378160C1 |
| ПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ДОПОЛНИТЕЛЬНЫМ ВОДОРОДНЫМ МОДУЛЕМ | 2014 |
|
RU2571153C1 |
| УСТРОЙСТВО АВАРИЙНОГО СПАСЕНИЯ ДИСТАНЦИОННО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2547122C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2362981C2 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2424539C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2380286C1 |







Дистанционно пилотируемый летательный аппарат содержит основную силовую установку, по меньшей мере, с одним двигателем, пригодным для вращения множества винтов, основной блок управления, содержащий, по меньшей мере, один приемник, выполненный с возможностью приема команд от блока дистанционного управления, вспомогательный узел полета с дополнительным блоком управления, выполненным с возможностью обработки данных, относящихся к полету, и который включает в себя дополнительный приемник, выполненный с возможностью приема команд от дополнительного блока дистанционного управления, а также содержит размещенные определенным образом верхнее крыло, нижнее крыло и устройство для выброса верхнего крыла и надувания нижнего крыла. Обеспечивается повышение безопасности посадки для летательного аппарата и для людей, находящихся под ним. 11 з.п. ф-лы, 10 ил.
1. Дистанционно пилотируемый летательный аппарат (1), содержащий основную силовую установку (23), по меньшей мере, с одним двигателем, пригодным для вращения множества винтов (3), и основной блок управления, содержащий, по меньшей мере, один приемник, выполненный с возможностью приема команд от блока дистанционного управления, при этом упомянутый летательный аппарат (1) отличается тем, что содержит вспомогательный узел (4) полета, пригодный для вмешательства в случае отказа летательного аппарата (1) или аварийной ситуации, причем упомянутый вспомогательный узел (4) полета снабжен дополнительным блоком (5) управления, выполненным с возможностью обработки данных, относящихся к полету, и который включает в себя дополнительный приемник (27), выполненный с возможностью приема команд от дополнительного блока (70) дистанционного управления, при этом в случае отказа или аварийной ситуации упомянутый дополнительный блок (5) управления выполнен с возможностью формирования в качестве ответа команды (S1) активации, подходящей для активации первого устройства (8) для выброса верхнего крыла (9), помещенного в первый отсек (12) летательного аппарата (1), и для надувания нижнего крыла (17), размещенного во втором отсеке (25) летательного аппарата (1), а также для формирования команды (S2) запрета основной силовой установке (23), причем упомянутое верхнее крыло (9) является маневренным посредством упомянутого дополнительного блока (70) дистанционного управления, а нижнее крыло (17) имеет форму для взаимодействия с верхним крылом (9) для обеспечения устойчивости летательного аппарата.
2. Летательный аппарат (1) по п.1, отличающийся тем, что упомянутый дополнительный блок (5) управления снабжен множеством датчиков (6) для обнаружения ряда величин, среди которых, по меньшей мере, линейное и угловое ускорение, которому подвергается летательный аппарат (1), и давление окружающей среды, причем упомянутый дополнительный блок (5) управления выполнен с возможностью сравнения упомянутых величин с предельными значениями, которые идентифицируют состояние отказа летательного аппарата (1), для распознавания последнего и, в качестве ответа, формирования упомянутой команды (S1) активации и команды (S2) запрета.
3. Летательный аппарат (1) по п.1, отличающийся тем, что дополнительный блок (5) управления выполнен с возможностью контроля уровня радиосигнала, который соединяет летательный аппарат (1) с дополнительным блоком (70) дистанционного управления, и для сравнения упомянутого уровня радиосигнала с предельным значением, которое идентифицирует аварийное состояние и, в качестве ответа, формирует упомянутую команду (S1) активации и команду (S2) запрета.
4. Летательный аппарат (1) по п.1, отличающийся тем, что дополнительный блок (5) управления выполнен с возможностью распознавания аварийной команды посредством дополнительного блока (70) дистанционного управления, неисправности в упомянутых датчиках (6) или скорости летательного аппарата, которая превышает заданный предел безопасности и, в качестве ответа, формирует упомянутую команду (S1) активации и команду (S2) запрета.
5. Летательный аппарат (1) по п.1, отличающийся тем, что первое устройство (8) содержит расширительную камеру (11), сложенную сильфоном внутри первого отсека (12) летательного аппарата (1) и соединенную с резервуаром (10), внутри которого сохраняется сжатая текучая среда под высоким давлением, причем упомянутый резервуар (10) снабжен быстродействующим выпускным клапаном, пригодным для электромеханической активации посредством упомянутого управления активацией (S1), формируемого дополнительным блоком (5) управления в случае отказа летательного аппарата (1) или аварийной ситуации, при этом упомянутый клапан выполнен с возможностью выпускания упомянутой сжатой текучей среды, содержащейся в резервуаре (10), внутрь упомянутой расширительной камеры (11), причем упомянутая расширительная камера (11) пригодна для быстрого надувания из-за высокого давления, вводимого в нее из резервуара (10), принимая форму конуса или цилиндра для выталкивания и развертывания верхнего крыла (9).
6. Летательный аппарат (1) по п.1, отличающийся тем, что верхнее крыло (9) выполнено из ткани или другого материала, обладающего свойствами гибкости, и состоит в основном из двух полуусеченных конусообразных поверхностей (14), которые соединены друг с другом, при этом упомянутое верхнее крыло (9) соединено с каркасом (2) летательного аппарата (1) посредством пары тросов (15), которые, в свою очередь, сгруппированы во множество тросов (16), соединенных с верхним крылом (9) по верхнему периметру, причем упомянутое верхнее крыло (9) также обеспечено направляющим тросом (19), пригодным для соединения со средством управления, по меньшей мере, одной точкой периметра верхнего крыла (9).
7. Летательный аппарат (1) по п.6, отличающийся тем, что верхнее крыло (9) является маневренным посредством упомянутых средств управления, которые соединены с упомянутым дополнительным блоком (5) управления, причем упомянутые средства управления пригодны для тяги упомянутого направляющего троса (19) для деформации конструкции верхнего крыла (9) посредством команды дистанционного управления, принятой от дополнительного блока (70) дистанционного управления.
8. Летательный аппарат (1) по п.5, отличающийся тем, что надувное нижнее крыло (17) находится в сообщении по текучей среде с расширительной камерой (11) через выходной канал (18), причем упомянутое нижнее крыло (17) надувается текучей средой, предварительно используемой для надувания расширительной камеры (11).
9. Летательный аппарат (1) по п.1, отличающийся тем, что нижнее крыло (17) имеет стандартизированный тип профиля, определенный Американской федеральной организацией NACA.
10. Летательный аппарат (1) по любому из предшествующих пунктов, отличающийся тем, что нижнее крыло (17) служит в качестве подушки безопасности, подходящей для защиты наиболее причиняющих ущерб частей летательного аппарата (1) от ударов предметов или людей.
11. Летательный аппарат (1) по п.6, отличающийся тем, что верхнее крыло (9) и нижнее крыло (17) имеют форму для формирования непрерывного поворота летательного аппарата (1) вправо или влево, в то же время посредством тяги от дистанционного упомянутого направляющего троса (19) может формировать состояние прямолинейной траектории или состояние поворота в противоположном направлении по сравнению с тем, которое сообщается верхним крылом (9).
12. Летательный аппарат (1) по любому из предшествующих пунктов, отличающийся тем, что вспомогательный узел (4) полета содержит дополнительный движущий винт (20), также управляемый блоком (70) дистанционного управления и работающий в плоскости, которая перпендикулярна оси крена летательного аппарата (1), причем упомянутый дополнительный движущий винт (20) формирует увеличение подъемной силы.
| СИСТЕМА ПАРАШЮТИРОВАНИЯ И СПОСОБ ЕЁ РАБОТЫ | 2013 |
|
RU2527633C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПЛАНИРУЮЩИМ ПАРАШЮТОМ | 1994 |
|
RU2094325C1 |
| EP 3093239 A1, 16.11.2016 | |||
| US 6416019 B1, 09.07.2002 | |||
| WO 2016141928 A1, 15.09.2016. | |||

