Изобретение относится к области неразрушающего контроля нефтегазопроводов, может быть использовано для целей определения дефектов, позиционирования их на трубопроводе и определения пространственных координат с помощью системы ориентации и навигации, а также измерения пройденного внутритрубным инспектирующим снарядом-дефектоскопом расстояния.
Известен внутритрубный снаряд-дефектоскоп, содержащий цилиндрический контейнер, являющийся магнитопроводом, закрепленные на нем в передней и задней частях полюсы постоянного магнита, щетки-магнитопроводы, размещенные в радиальных направлениях между полюсами постоянного магнита и трубопроводом, концентрический ряд ластов, размещенных между полюсами постоянного магнита, в каждом из ластов вмонтированы дефектоскопические датчики, внутри контейнера размещен блок электроники с приборами ориентации и навигации, а также блок источников электрического питания, два колесных одометра, один из которых расположен в задней части контейнера, отличающийся тем, что дополнительно содержит вал с двумя жестко закрепленными колесами, расположенными в задней части контейнера, двигатель, жестко закрепленный на контейнере и соединенный через механическую передачу с валом, два колеса в передней части контейнера, видеокамеру с подсветкой в передней части контейнера, соединенную с блоком электроники, радиоприемник-передатчик, закрепленный на контейнере, при этом второй колесный одометр расположен в передней части контейнера (патент на полезную модель, МПК G01C 21/00, №118739 от 27.04.2012 г.).
Недостатком данного внутритрубного снаряда-дефектоскопа является недостаточная точность измерения пройденного пути, связанная с проскальзыванием колес одометра.
Наиболее близким по технической сущности и достигаемому результату к предложенному устройству является внутритрубный снаряд-дефектоскоп, содержащий цилиндрический гермоконтейнер, опорные элементы, включающие в себя переднюю и заднюю эластичные манжеты, установленные на краях гермоконтейнера, дефектоскопические датчики, расположенные снаружи по периметру гермоконтейнера, и соединенные с размещенным внутри гермоконтейнера электронным блоком, содержащим блок питания, приборы ориентации, навигации и блок регистратора, систему измерения пройденного пути, снабженную подпружиненными колесами, и закрепленную в задней части гермоконтейнера (патент РФ №2334980 от 23.04.2007 г., МПК G01N 27/83, F17D 5/02, G01B 7/14).
Недостатком данного внутритрубного снаряда-дефектоскопа является недостаточная точность измерения пройденного пути
Указанный внутритрубный снаряд-дефектоскоп снабжен системой измерения пройденного пути, выполненной на основе колесных одометров. Измеритель пройденного пути, выполненный на основе колесного одометра, действие которого основано на измерении оборотов прижимного колеса, практически не может обеспечить длительный контакт с поверхностью исследуемой трубы без проскальзывания колеса. Кроме того, при длительном контакте с поверхностью исследуемой трубы колесо изнашивается, его диаметр уменьшается, что также приводит к ошибке измерения пройденного пути. Все эти факторы приводят к тому, что при обследовании труб большой длины небольшие ошибки измерения пути за счет проскальзывания колеса и(или) за счет его износа приводят к неправильному определению места расположения дефектов трубы.
Техническим результатом изобретения является повышение точности измерения пройденного пути.
Технический результат достигается за счет того, что внутритрубный снаряд-дефектоскоп содержит цилиндрический гермоконтейнер, опорные элементы, включающие в себя переднюю и заднюю эластичные манжеты, установленные на краях гермоконтейнера, дефектоскопические датчики, расположенные снаружи по периметру гермоконтейнера и соединенные с размещенным внутри гермоконтейнера электронным блоком, содержащим блок питания, приборы ориентации, навигации и блок регистратора, систему измерения пройденного пути, снабженную подпружиненными колесами и закрепленную в задней части гермоконтейнера, при этом система измерения пройденного пути выполнена в виде трех подпружиненных колес, расположенных под углом 120° друг к другу, причем каждое колесо снабжено акустическим преобразователем, закрепленным на оси каждого подпружиненного колеса под углом 30°-60° к центральной оси снаряда-дефектоскопа, размещенные в гермоконтейнере три измерителя пройденного пути и сумматор, при этом каждый преобразователь соединен кабелем с входом соответствующего измерителя пройденного пути, а выход каждого измерителя пройденного пути соединен с соответствующим входом сумматора, выход которого соединен с блоком регистратора, причем измеритель пройденного содержит генератор гармонического сигнала, последовательно соединенные цифровой измеритель доплеровского сдвига частоты, вычислитель скорости движения, вычислитель пройденного пути, при этом выход генератора гармонического сигнала соединен с преобразователем и входом цифрового измерителя доплеровского сдвига частоты.
Сущность изобретения поясняется чертежами, на которых схематически представлено предлагаемое устройство.
На фиг. 1 изображен общий вид внутритрубного снаряда-дефектоскопа.
На фиг. 2 представлена система измерения пройденного пути.
На фиг. 3 представлена блок-схема соединений измерителей пройденного пути с сумматором.
На фиг. 4 изображена блок схема одного измерителя пройденного пути.
На фиг. 5 представлена схема работы преобразователя.
На фиг. 6 изображена эмпирическая зависимость амплитуд флуктуаций сигнала на преобразователе при движении снаряда-дефектоскопа по трубе при разных углах положения преобразователей относительно центральной оси снаряда-дефектоскопа.
Внутритрубный снаряд-дефектоскоп, установленный в трубе 1, содержит цилиндрический гермоконтейнер 2, опорные элементы, включающие в себя переднюю 3 и заднюю 4 эластичные манжеты, установленные на краях гермоконтейнера 2, дефектоскопические датчики 5, расположенные снаружи по периметру гермоконтейнера 2 и соединенные с размещенным внутри гермоконтейнера электронным блоком 6, содержащим блок питания, приборы ориентации, навигации и блок регистратора, систему измерения пройденного пути, снабженную подпружиненными колесами 7 и закрепленную в задней части гермоконтейнера 2, при этом система измерения пройденного пути выполнена в виде трех подпружиненных колес 7, расположенных под углом 120° друг к другу, причем каждое колесо 7 снабжено акустическим преобразователем 8, закрепленным на оси каждого подпружиненного колеса 7 под углом 30°-60° к центральной оси снаряда-дефектоскопа, размещенные в гермоконтейнере 2 три измерителя пройденного пути 9 и сумматор 10, при этом каждый преобразователь 8 соединен кабелем 11 с входом соответствующего измерителя пройденного пути 9, а выход каждого измерителя пройденного пути 9 соединен с соответствующим входом сумматора 10, выход которого соединен с блоком регистратора, причем измеритель пройденного пути 9 содержит генератор гармонического сигнала 12, последовательно соединенные цифровой измеритель доплеровского сдвига частоты 13, вычислитель скорости движения 14, вычислитель пройденного пути 15, при этом выход генератора гармонического сигнала 12 соединен с преобразователем 8 и входом цифрового измерителя доплеровского сдвига частоты 13.
Устройство работает следующим образом.
Внутритрубный снаряд-дефектоскоп устанавливают в исследуемую трубу 1. Опорные элементы, включающие в себя переднюю 3 и заднюю 4 эластичные манжеты, установленные на краях гермоконтейнера 2, обеспечивают движение внутритрубного снаряда-дефектоскопа в трубе 1 под действием движущейся среды. Подключают источники питания к электронному блоку 6, содержащему блок питания, приборы ориентации, навигации, блок регистратора, систему измерения пройденного пути, снабженную подпружиненными колесами 7 и закрепленную в задней части гермоконтейнера 2. Дефектоскопические датчики 5, расположенные снаружи по периметру гермоконтейнера 2 и соединенные с размещенным внутри гермоконтейнера 2 электронным блоком 6, в процессе движения внутритрубного снаряда-дефектоскопа в трубе 1 определяют дефекты трубы 1 и подают информацию на блок регистратора.
Одновременно система измерения пройденного пути, выполненная в виде трех подпружиненных колес 7, расположенных под углом 120° друг к другу, причем каждое колесо 7 снабжено акустическим преобразователем 8, закрепленным на оси каждого подпружиненного колеса 7, под углом 30°-60° к центральной оси снаряда-дефектоскопа, дает информацию о пройденном пути в реальном масштабе времени и также подает эту информацию на регистратор. Это позволяет определить координаты дефектов по всему пути внутритрубного снаряда-дефектоскопа в трубе 1. Таким образом, можно не только определить дефекты трубы, но и определить их точное место расположение.
В процессе движения внутритрубного снаряда-дефектоскопа преобразователи 8, закрепленные на осях трех подпружиненных колес 7, установленных под углом 120° друг к другу, перемещаются вместе с снарядом-дефектоскопом.
Три измерителя пройденного пути 9, соединенные с соответствующими тремя преобразователями 8 кабелями 9, вычисляют путь, пройденный внутритрубным снарядом-дефектоскопом. Полученные данные поступают на соответствующий вход сумматора 10 и далее на регистратор электронного блока 6.
Генераторы гармонического сигнала 12 каждого из трех измерителей пройденного пути 9 подают синусоидальное напряжение на соответствующие преобразователи 8. Излученные преобразователями 8 акустические волны попадают на рассеивающую внутреннюю поверхность трубы 1. Отраженные от шероховатостей внутренней поверхности трубы 1 рассеянные акустические волны попадают на приемную поверхность преобразователей 8, создавая дополнительное электрическое напряжение на преобразователях 8, пропорциональное амплитуде звукового давления отраженных рассеянных волн. Одновременно генераторы гармонического сигнала 12 подают синусоидальное напряжение на входы цифровых измерителей доплеровского сдвига частоты 13. В цифровых измерителях доплеровского сдвига частоты 13 проводят преобразование Фурье сигнала, при этом рассеянный сигнал отделяют в пространстве частот от сигнала возбуждения и измеряют величину доплеровского сдвига частоты рассеянного сигнала относительно частоты генератора гармонического сигнала 12. Далее сигнал поступает на вход вычислителя скорости движения 14. Сдвиг частоты рассеянного сигнала однозначно связан со скоростью относительного движения излучателя и стенки трубы. Вычисляют скорость относительного движения по известной формуле:
 ,
,
где c - скорость звука;
β - угол между осью преобразователя и рассеивающей поверхностью.
Затем сигнал поступает на вычислитель пройденного пути 15, в котором скорость интегрируют и вычисляют пройденный внутритрубным снарядом-дефектоскопом путь.
После чего сигнал поступает на соответствующий вход сумматора 10.
Рабочая частота генератора гармонического сигнала  выбирается из следующих соображений. Амплитуда рассеянных акустических волн зависит от величины шероховатости ξ и от волнового числа k звуковой волны. Для того чтобы рассеянные на шероховатостях звуковые волны имели достаточную (из соображений отношения «сигнал-шум») величину для регистрации, необходимо, чтобы ξ⋅k имели величину, превышающую хотя бы 0.1:
выбирается из следующих соображений. Амплитуда рассеянных акустических волн зависит от величины шероховатости ξ и от волнового числа k звуковой волны. Для того чтобы рассеянные на шероховатостях звуковые волны имели достаточную (из соображений отношения «сигнал-шум») величину для регистрации, необходимо, чтобы ξ⋅k имели величину, превышающую хотя бы 0.1:  , или
, или  . Подставляя c=1500 м/сек, величину характерной шероховатости внутренней поверхности трубы ξ=20-10-6 м, получаем:
. Подставляя c=1500 м/сек, величину характерной шероховатости внутренней поверхности трубы ξ=20-10-6 м, получаем:  Гц.
Гц.
Установка расстояния и угла наклона оси преобразователя 8 относительно стенки трубы определяется из необходимости максимально увеличить величину рассеянного акустического сигнала.
Эксперименты показали, что в диапазоне расстояний 20-50 мм и углов 30°-60° преобразователь 8 уверенно принимает рассеянный сигнал от шероховатостей высотой 20-100 мкм. Вне этого диапазона углов рассеянное поле не дает достаточного вклада в полный сигнал. На фиг. 6 показана экспериментальная зависимость флуктуаций полного сигнала, характеризующая именно рассеянный сигнал (нормировка - относительно сигнала флуктуаций при 45°) на преобразователе, от угла наклона при его движении над шероховатой границей. 0° соответствует скользящему направлению излучаемого звука, 90° соответствует нормальному направлению. Видно, что в диапазоне углов 30°-60° значения флуктуаций максимальны.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С КОЛЕСНЫМИ ОДОМЕТРАМИ | 2007 |
|
RU2334980C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ИЗМЕНЯЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2361198C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕЗЕРВИРОВАННЫМИ ДАТЧИКАМИ ДЕФЕКТОВ И ОДОМЕТРАМИ | 2009 |
|
RU2406082C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО ВНУТРИТРУБНЫМ СНАРЯДОМ-ДЕФЕКТОСКОПОМ С ОДОМЕТРАМИ | 2006 |
|
RU2316782C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ СМЕЩЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2001 |
|
RU2206871C2 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ОДОМЕТРАМИ | 2005 |
|
RU2306479C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| АППАРАТ ВНУТРИТРУБНОГО КОНТРОЛЯ И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2010 |
|
RU2451867C2 |
Изобретение относится к области метрологии, в частности к средствам неразрушающего контроля. Внутритрубный снаряд-дефектоскоп содержит цилиндрический гермоконтейнер, опорные элементы в виде эластичных манжет, датчики, расположенные снаружи по периметру гермоконтейнера и соединенные с размещенным внутри гермоконтейнера электронным блоком. Устройство содержит блок питания, приборы ориентации, навигации, блок регистратора, систему измерения пройденного пути в виде трех подпружиненных колес, расположенных под углом 120° друг к другу. Каждое колесо снабжено акустическим преобразователем, закрепленным на оси каждого подпружиненного колеса под углом 30°-60° к центральной оси снаряда-дефектоскопа. В гермоконтейнере установлены три измерителя пройденного пути и сумматор, при этом каждый преобразователь соединен кабелем с входом соответствующего измерителя пройденного пути, а выход каждого измерителя пройденного пути соединен с соответствующим входом сумматора, выход которого соединен с блоком регистратора. Измеритель содержит генератор гармонического сигнала, цифровой измеритель доплеровского сдвига частоты, вычислитель скорости движения, вычислитель пройденного пути. Выход генератора гармонического сигнала соединен с преобразователем и входом цифрового измерителя доплеровского сдвига частоты. Технический результат - повышение точности измерения пройденного пути. 6 ил.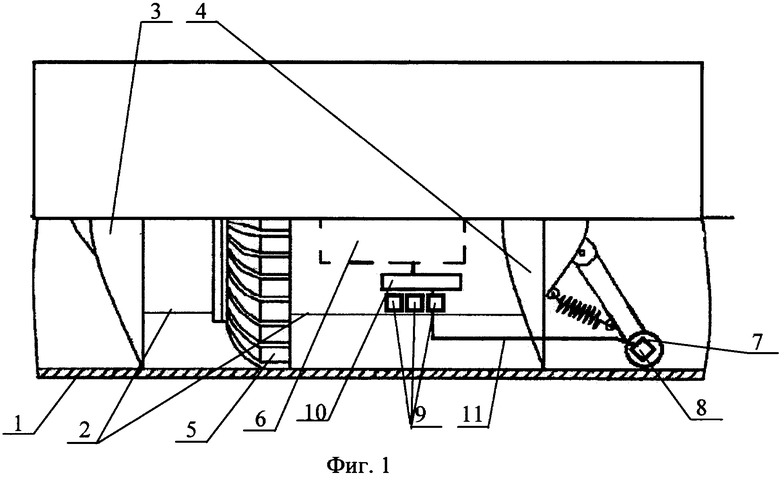
Внутритрубный снаряд-дефектоскоп, содержащий цилиндрический гермоконтейнер, опорные элементы, включающие в себя переднюю и заднюю эластичные манжеты, установленные на краях гермоконтейнера, дефектоскопические датчики, расположенные снаружи по периметру гермоконтейнера и соединенные с размещенным внутри гермоконтейнера электронным блоком, содержащим блок питания, приборы ориентации, навигации и блок регистратора, систему измерения пройденного пути, снабженную подпружиненными колесами и закрепленную в задней части гермоконтейнера, отличающийся тем, что система измерения пройденного пути выполнена в виде трех подпружиненных колес, расположенных под углом 120° друг к другу, причем каждое колесо снабжено акустическим преобразователем, закрепленным на оси каждого подпружиненного колеса под углом 30°-60° к центральной оси снаряда-дефектоскопа, размещенные в гермоконтейнере три измерителя пройденного пути и сумматор, при этом каждый преобразователь соединен кабелем с входом соответствующего измерителя пройденного пути, а выход каждого измерителя пройденного пути соединен с соответствующим входом сумматора, выход которого соединен с блоком регистратора, причем каждый измеритель пройденного пути содержит генератор гармонического сигнала, последовательно соединенные цифровой измеритель доплеровского сдвига частоты, вычислитель скорости движения, вычислитель пройденного пути, при этом выход генератора гармонического сигнала соединен с преобразователем и входом цифрового измерителя доплеровского сдвига частоты.
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С КОЛЕСНЫМИ ОДОМЕТРАМИ | 2007 |
|
RU2334980C1 |
| US 4945775 A1, 07.08.1990 | |||
| US 4202216 A1, 13.05.1980 | |||
| DE 3612498 A, 29.10.1987 | |||
| WO 1997012237 A1, 03.04.1997 | |||
| CN 103604022 A, 26.02.2014 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАДИОАКТИВНОСТИ ВЕЩЕСТВА | 1929 |
|
SU22825A1 |
| JP 2002302033 A, 15.10.2002 | |||
| US 3539915 A1,10.11.1970. | |||

