Изобретение относится к области вычислительной техники и может быть использовано в корабельных информационно-управляющих системах (ИУС), автоматизированных системах управления, гидроакустических и радиолокационных комплексах.
Известна многоуровневая вычислительная система, используемая для получения, оценки, анализа принятой информации и выбора решения в процессе управления кораблем (Патент РФ на изобретение №2133498), содержащая процессоры цифровой обработки сигналов, цифровые вычислительные машины, шины обмена.
Недостатком известной системы является ограничение пропускной способности информационно-управляющих магистралей, что снижает ее надежность при увеличении количества целей и решаемых задач.
Известна корабельная боевая информационно-управляющая система (Патент РФ на изобретение №2163392), содержащая пульт оператора, оснащенный тремя электронно-вычислительными машинами (ЭВМ), подключенными соответственно к первой, второй и третьей системным интерфейсным магистралям (СИМ) и объединенными в сеть посредством основной и резервной интерфейсных магистралей информационного обмена и соответствующих адаптеров локальной сети. К первой ЭВМ подключены основная клавиатура, один из выходов демультиплексора координатно-указательного устройства, ОЗУ и устройство документирования, которое при необходимости может быть подключено и ко второй ЭВМ. К СИМ первой ЭВМ подключены два ДЗУ, видеоадаптер, соединенный с устройством отображения графической информации, адаптер дополнительной клавиатуры и адаптер цифрового ввода-вывода, к которому подключена панель контроля и управления. Вторая ЭВМ выполнена в виде одноплатной PC-совместимой ЭВМ с видеовыходом, к которому подключено другое устройство отображения информации, интерфейсом внешней клавиатуры, входами для подключения ОЗУ и двух ДЗУ, входами для подключения внешних ДЗУ и накопителей информации на гибких магнитных дисках, входами-выходами последовательного и параллельного интерфейсов и входом для подключения ко второму выходу демультиплексора координатно-указательного устройства. К СИМ третьей ЭВМ подключены два ДЗУ и три адаптера резервированных мультиплексных каналов, через которые осуществляется связь пульта с системами оружия и другими техническими средствами.
Недостатком известной системы является ограничение пропускной способности информационно-управляющих магистралей, что снижает ее надежность при передаче и отображении больших объемов первичной гидроакустической и радиолокационной информации.
Известна многоуровневая вычислительная система (Патент РФ на изобретение №2193795), содержащая основные и дополнительные процессоры цифровой обработки сигналов первого уровня, шины ввода данных, основные и дополнительные цифровые вычислительные машины второго уровня, цифровые вычислительные машины третьего и четвертого уровней, пульт оператора, двунаправленные шины обмена первого, второго и третьего уровней.
Недостатком данной многоуровневой вычислительной системы является сложная иерархическая структура, обуславливающая сравнительно низкую надежность системы, ограничивающая пропускную способность многоуровневых магистралей и увеличивающая время реакции системы.
Наиболее близким техническим решением по отношению к заявляемому является цифровой вычислительный комплекс (ЦВК) для обработки сигналов в гидроакустических системах (Патент РФ на изобретение №2207620), который и выбран в качестве прототипа.
ЦВК содержит один или несколько модулей ЭВМ, выполненных на базе универсальных микропроцессоров, один или несколько модулей программируемого процессора сигналов (ППС), модули пульта, включающие мониторы, пультовую ЭВМ, клавиатуру и манипулятор. Модуль ППС объединяет в группу несколько цифровых сигнальных процессоров (ЦСП) и один или несколько программируемых коммутаторов. Программируемый коммутатор принимает данные по радиальному каналу с входа ЦВК и коммутирует их во входную высокоскоростную кольцевую шину, подключенную к одному порту ЦСП. Другой порт ЦСП подключен ко второй шине, обеспечивающей обмен данными между ЦСП группы и между каждым ЦСП и общей памятью модуля ППС. ЦВК содержит две сети Ethernet, при этом модули ППС объединены с модулями ЭВМ одной, а модули ЭВМ объединены с модулями пультов другой сетью Ethernet.
Недостатком данного ЦВК является ограничение пропускной способности каналов локальной вычислительной сети (ЛВС), соединяющих модули ЭВМ с модулями пультов, что уменьшает функциональные возможности и производительность, снижает надежность устройства.
Техническим результатом предлагаемого изобретения является повышение быстродействия, повышение надежности, расширение функциональных возможностей ИУС, унификация пультов управления.
Технический результат достигается за счет того, что многоуровневая многопроцессорная корабельная ИУС для распределенной обработки информации и управления в реальном масштабе времени, имеющая модульную реконфигурируемую архитектуру, содержит блок процессоров цифровой обработки сигналов первого уровня, общекорабельную базу данных и вычислительные серверы второго уровня, пульты управления третьего уровня, ЛВС информации первого и второго уровней, основную и резервную ЛВС информации второго и третьего уровней. При этом многоуровневая многопроцессорная корабельная ИУС дополнительно содержит общую ЛВС, а вычислительные устройства пультов управления состоят из системной и графической ЭВМ, соединенных между собой ЛВС межмашинного обмена, при этом системная ЭВМ имеет выходы в основную и резервную ЛВС информации второго и третьего уровней, графическая ЭВМ имеет выход в общую ЛВС, к системной ЭВМ подключены сенсорная панель и манипулятор графический, к графической ЭВМ подключены несколько устройств отображения, клавиатура, манипулятор шаровой.
Структурная схема многоуровневой многопроцессорной корабельной ИУС представлена на чертеже, где:
1 - модуль программируемого процессора сигналов;
2 - вычислительный сервер;
3 - общекорабельная база данных;
4 - пульт управления;
5 - графическая ЭВМ;
6 - системная ЭВМ;
7 - первое устройство отображения;
8 - второе устройство отображения;
9 - сенсорная панель;
10 - клавиатура;
11 - манипулятор шаровой;
12 - манипулятор графический.
Рассмотрим пример функционирования ИУС при обработке гидроакустической и радиолокационной информации.
Информационно-управляющая система представляет собой распределенную многопроцессорную вычислительную систему, структурно разделенную на три уровня иерархии.
На первом уровне выполняется вся интенсивная цифровая обработка сигналов в реальном масштабе времени. Для этого предназначены модули программируемого процессора сигналов 1, состоящие из групп индивидуальных сигнальных процессоров. Информация между модулями передается посредством магистральной шины последовательного интерфейса типа Манчестер и локальной вычислительной сети Ethernet. Полученная в результате вычислений на первом уровне первичная гидроакустическая и радиолокационная информация выдается в общую ЛВС и используется на втором уровне для вторичной обработки, а на третьем уровне для отображения операторам ИУС.
На втором уровне выполняется вторичная обработка гидроакустической и радиолокационной информации (вычисление формуляров целей, отождествление целей от различных источников и т.д.), а также другие, специфические для ИУС, функции. Отличительной особенностью представленной структуры ИУС является то, что вычислительные серверы второго уровня играют роль «шлюзов», передавая с первого уровня на третий только необходимый для отображения операторам ИУС состав информации. При этом первичная гидроакустическая и радиолокационная информация циркулирует только в общей ЛВС, а вторичная гидроакустическая и радиолокационная информация (формуляры целей) и результаты решения специальных задач выдаются одновременно в основную и резервную ЛВС (Ethernet) второго и третьего уровней. Для регистрации и документирования необходимой информации используется общекорабельная база данных 3.
На третьем уровне выполняются формирование и отображение операторам информации о тактической обстановке, ввод в ИУС исходных данных, а также решение разовых сервисных и специальных функциональных задач. Для этого предназначены пульты управления 4, вычислительные устройства которых состоят из системной 6 и графической 5 ЭВМ. Системная ЭВМ выполняет функции обработки информации в ИУС, графическая ЭВМ выполняет только функции отображения. К графической ЭВМ подключены устройства отображения информации 7, 8, клавиатура 10, манипулятор шаровой 11. К системной ЭВМ подключена сенсорная панель 9, манипулятор графический 12.
Вычислительные устройства пультов управления обеспечивают формирование и отображение диалоговых окон, содержащих информацию о тактической обстановке (ТО). В окне ТО на фоне электронной навигационной карты отображается совмещенная первичная, вторичная гидроакустическая и радиолокационная информация, информация, поступающая по каналам связи, результаты решения специальных задач.
Отображение окон ТО построено по технологии X-терминал. Х-сервером является графическая ЭВМ, а Х-клиентом - системная ЭВМ. Системная ЭВМ обеспечивает прием из основной и резервной ЛВС информации о вторичной гидроакустической и радиолокационной информации, поступившей по каналам связи, результатов решения специальных задач, выполняет загрузку и хранение в оперативной памяти электронных навигационных карт, формирование команд на отображение графических примитивов и выдачу их в графическую ЭВМ посредством ЛВС межмашинного обмена. Графическая ЭВМ выполняет прием команд из ЛВС межмашинного обмена и непосредственное отображение графических примитивов на устройствах отображения, прием первичной гидроакустической и радиолокационной информации из общей ЛВС и ее непосредственное отображение на устройствах отображения.
Многоуровневая архитектура ИУС позволяет обеспечить функционирование вычислительных средств первого и второго уровней в режиме жесткого реального времени, системных ЭВМ пультов управления в режиме мягкого реального времени, графических ЭВМ пультов управления - с темпом восприятия человека.
Для повышения надежности передачи первичной гидроакустической и радиолокационной информации может быть введена резервная общая ЛВС.
В случае больших объемов первичной гидроакустической и радиолокационной информации и ограниченной пропускной способности общей ЛВС вместо одной общей ЛВС могут быть введены несколько специализированных общих ЛВС, например ЛВС первичной гидроакустической информации, ЛВС первичной радиолокационной информации.
Представленная архитектура ИУС легко может быть адаптирована для передачи, обработки и отображения любого типа ресурсоемкой графической информации, например телевизионной, потокового видео, трехмерной графики и т.д., за счет введения специализированных общих ЛВС.
Повышение надежности ИУС достигается за счет разгрузки основной и резервной ЛВС второго и третьего уровней и передачи больших объемов графической информации по отдельной общей ЛВС.
Повышение быстродействия ИУС достигается за счет распределенной обработки информации на вычислительных средствах всех уровней, разгрузки системной ЭВМ и снятия с нее ресурсоемких функций формирования графического изображения и переноса их на графическую ЭВМ.
Освободившиеся ресурсы системной ЭВМ могут быть использованы для расширения функциональных возможностей ИУС.
Унификация пультов управления достигается за счет переноса функций, связанных с интенсивными вычислениями в режиме жесткого реального времени, на модули ППС первого уровня, функций сопряжения с использованием специальных интерфейсных каналов - на вычислительные серверы второго уровня, функций, связанных с документированием информации и ведением баз данных, - на общекорабельную базу данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА | 2007 |
|
RU2344472C1 |
| ЦИФРОВОЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ СИГНАЛОВ В ГИДРОАКУСТИЧЕСКИХ СИСТЕМАХ | 2001 |
|
RU2207620C2 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ ГИДРОАКУСТИЧЕСКОЙ СОВМЕСТИМОСТИ КОРАБЕЛЬНЫХ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2019 |
|
RU2724112C1 |
| КОРАБЕЛЬНАЯ ИНТЕГРИРОВАННАЯ МОСТИКОВАЯ СИСТЕМА | 2010 |
|
RU2453909C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОРАБЛЕЙ | 2007 |
|
RU2340950C1 |
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2015 |
|
RU2583741C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ БОЕВОГО КОРАБЛЯ С ПОВЫШЕННОЙ ЖИВУЧЕСТЬЮ | 2011 |
|
RU2510961C2 |
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ УПРАВЛЯЮЩАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2000 |
|
RU2174704C1 |
| Интегрированная система навигации кораблей и судов обеспечения Военно-Морского Флота | 2020 |
|
RU2765606C1 |
| Комплекс технических средств автоматизации управления | 2016 |
|
RU2614927C1 |
Изобретение относится к области вычислительной техники и может быть использовано в корабельных информационно-управляющих системах (ИУС), автоматизированных системах управления, гидроакустических и радиолокационных комплексах. Техническим результатом является повышение быстродействия, повышение надежности, расширение функциональных возможностей ИУС, унификация пультов управления. Технический результат достигается тем, что в состав многоуровневой многопроцессорной корабельной ИУС дополнительно вводится общая локальная вычислительная сеть (ЛВС), а вычислительные устройства пультов управления состоят из системной и графической электронно-вычислительных машин (ЭВМ), соединенных между собой ЛВС межмашинного обмена, при этом системная ЭВМ имеет выходы в основную и резервную ЛВС информации второго и третьего уровней, графическая ЭВМ имеет выход в общую ЛВС, к системной ЭВМ подключены сенсорная панель и манипулятор графический, к графической ЭВМ подключены несколько устройств отображения, клавиатура, манипулятор шаровой. 2 з.п. ф-лы, 1 ил.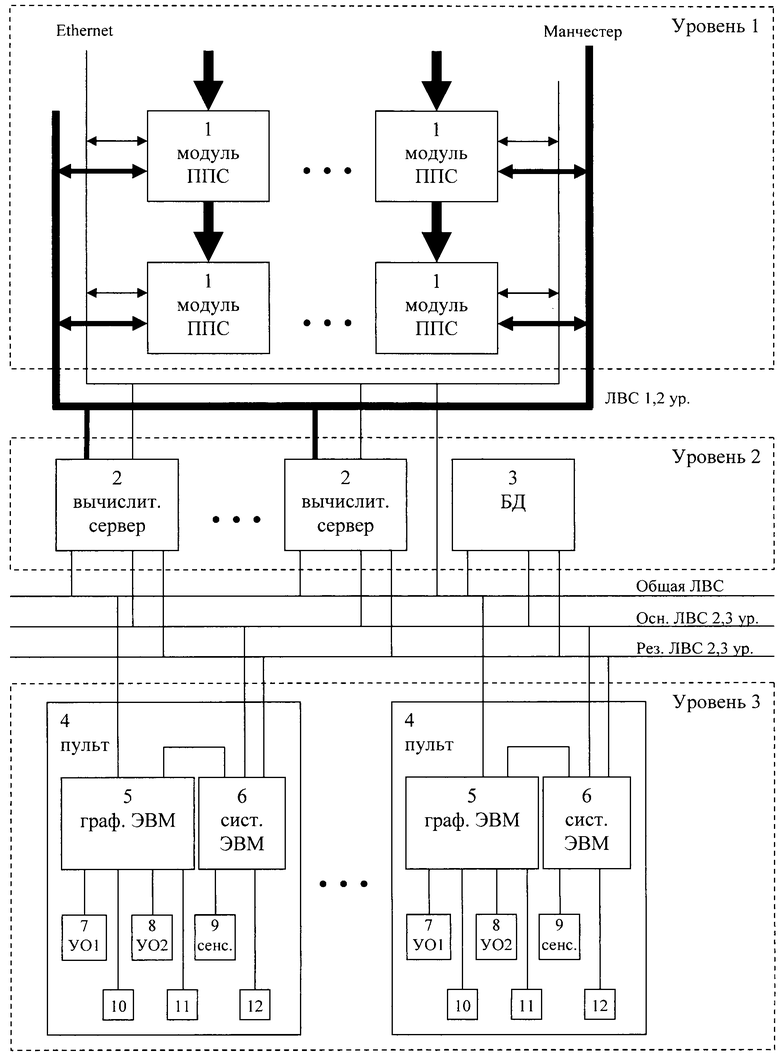
1. Многоуровневая многопроцессорная корабельная информационно-управляющая система (ИУС) для распределенной обработки информации и управления в реальном масштабе времени, имеющая модульную реконфигурируемую архитектуру, содержащая блок процессоров цифровой обработки сигналов первого уровня, общекорабельную базу данных и вычислительные серверы второго уровня, пульты управления третьего уровня с вычислительными устройствами, состоящими из нескольких системных электронно-вычислительных машин (ЭВМ), локальные вычислительные сети (ЛВС) информации первого и второго уровней, основную и резервную ЛВС информации второго и третьего уровней, отличающаяся тем, что в состав ИУС вводят общую ЛВС, а вычислительные устройства пультов управления состоят из системной и графической ЭВМ, соединенных между собой ЛВС межмашинного обмена, при этом системная ЭВМ имеет выходы в основную и резервную ЛВС информации второго и третьего уровней, графическая ЭВМ имеет выход в общую ЛВС, к системной ЭВМ подключают сенсорную панель и манипулятор графический, к графической ЭВМ подключают устройства отображения, клавиатуру, манипулятор шаровой.
2. Многоуровневая многопроцессорная корабельная информационно-управляющая система по п.1, отличающаяся тем, что в состав ИУС вводят резервную общую ЛВС, а графические ЭВМ вычислительных устройств пультов управления имеют выход в резервную общую ЛВС.
3. Многоуровневая многопроцессорная корабельная информационно-управляющая система по п.1, отличающаяся тем, что в состав ИУС вводят специализированные общие ЛВС, а графические ЭВМ вычислительных устройств пультов управления имеют выходы в специализированные общие ЛВС.
| ЦИФРОВОЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ СИГНАЛОВ В ГИДРОАКУСТИЧЕСКИХ СИСТЕМАХ | 2001 |
|
RU2207620C2 |
| СИСТЕМА ИНТЕЛЛЕКТУАЛЬНОЙ ПОДДЕРЖКИ КОМАНДИРА КОРАБЛЯ | 1996 |
|
RU2133498C1 |
| КОРАБЕЛЬНАЯ БОЕВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2000 |
|
RU2163392C1 |
| US 5247673 A, 21.09.1993. | |||

