Настоящее изобретение относится к независимой подвеске для моторизованного транспортного средства, подвеска принадлежит типу, заданному в преамбуле пункта 1 формулы изобретения.
Подвеска такого типа известна из патентной публикации (Европа) EP-A-1288028 от имени заявителя. Эта известная подвеска, по сути, содержит поперечный рычаг, поперечную тягу и тягу регулировки развала колес, каждые из которых помещены между держателем колеса и корпусом транспортного средства. Конкретно, поперечный рычаг содержит пару пластинчатых гибких элементов, которые сочленены на концах с держателем колеса и корпусом транспортного средства и соединены друг с другом посредством жесткого на кручение продольного трубчатого элемента. Во-первых, поперечный рычаг управляет двумя кинематическими степенями свободы вращения вокруг первой и второй по существу продольных осей, заданных посредством точек сочленения с держателем колеса и конструкцией транспортного средства. Более того, гибкость, конфигурация и ориентация двух пластинчатых рычагов поперечного рычага выбираются таким образом, чтобы держатель колеса был способен вращаться вокруг третьей оси предварительно определенной ориентации (упоминаемой как "ось сдвига") в результате деформации двух пластинчатых рычагов вокруг этой оси. Поперечный рычаг, следовательно, выполнен с возможностью управления третьей вращательной степени свободы держателя колеса вокруг оси сдвига. Эта третья степень свободы задается как "структурная" степень свободы, поскольку, в отличие от двух других вращательных степеней свободы, она задается не посредством пространственных ограничений, а посредством собственной гибкости компонентов рычага относительно оси сдвига. Чтобы добиться наилучшего компромисса между противоположными требованиями к подвеске для пассажиров транспортного средства от неровности дороги и для эффективной и быстрой реакции на силы, действующие на колеса, в частности сил поворота и торможения, эта третья ось предпочтительно выбирается таким образом, чтобы проходить поблизости пятна контакта шины.
Цель настоящего изобретения заключается в том, чтобы предоставить независимую подвеску для моторизованного транспортного средства, которая имеет лучшие эластокинематические характеристики, которая имеет более компактный размер и которая проще для установки на различные модели транспортного средства, чем на предшествующем уровне техники.
Эта и другие цели достигаются согласно изобретению посредством независимой подвески для транспортного средства, имеющей характеристики, изложенные в независимом пункте 1 формулы изобретения.
Дополнительные преимущественные характеристики изобретения излагаются в зависимых пунктах формулы изобретения.
Чтобы обобщить, изобретение основано на идее предоставления независимой подвески для транспортного средства, которая, в силу структуры и характеристик жесткости своих компонентов, формирует эластичную систему, имеющую две оси сдвига предварительно определенной ориентации, размещенные таким образом, чтобы действовать последовательно друг с другом, причем одна из осей задается парой пластинчатых гибких элементов.
Предпочтительно, две оси сдвига размещены в поперечной вертикальной плоскости и ориентированы перпендикулярно друг другу, при этом первая ось сдвига расположена по существу вертикально, тогда как вторая ось сдвига расположена по существу горизонтально, причем жесткость на кручение эластичной системы вокруг второй по существу горизонтальной оси сдвига меньше жесткости на кручение вокруг первой по существу вертикальной оси сдвига.
Характеристики и преимущества настоящего изобретения должны стать очевидными из последующего подробного описания, приведенного только в качестве неограничивающего примера со ссылкой на прилагаемые чертежи, из которых:
фиг.1 - это схематичная иллюстрация независимой подвески для моторизованного транспортного средства согласно предпочтительному варианту осуществления настоящего изобретения;
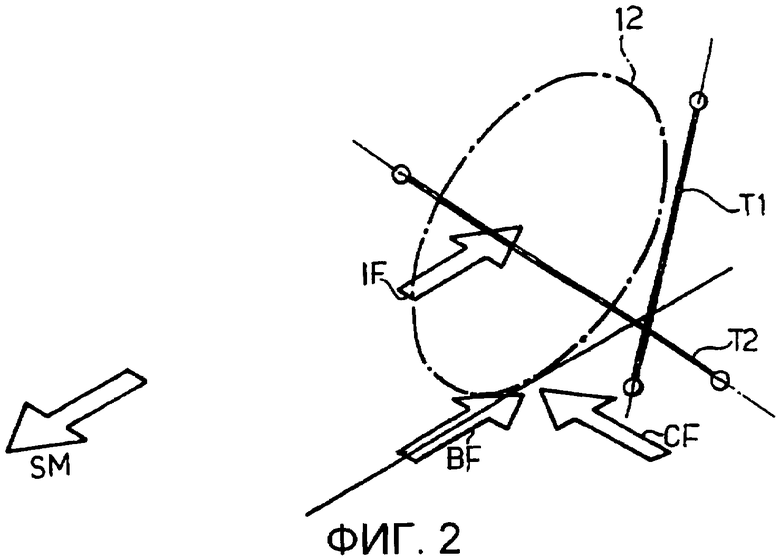
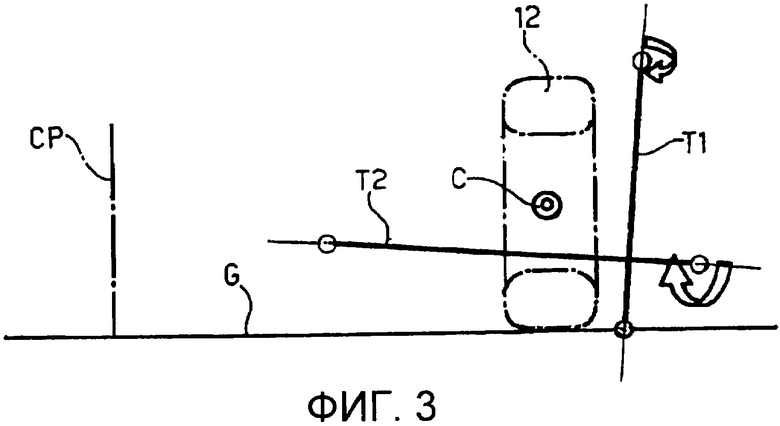
фиг.2 и 3 - это схематичные иллюстрации в перспективе и спереди соответственно, которые показывают размещение двух осей сдвига подвески по фиг.1;
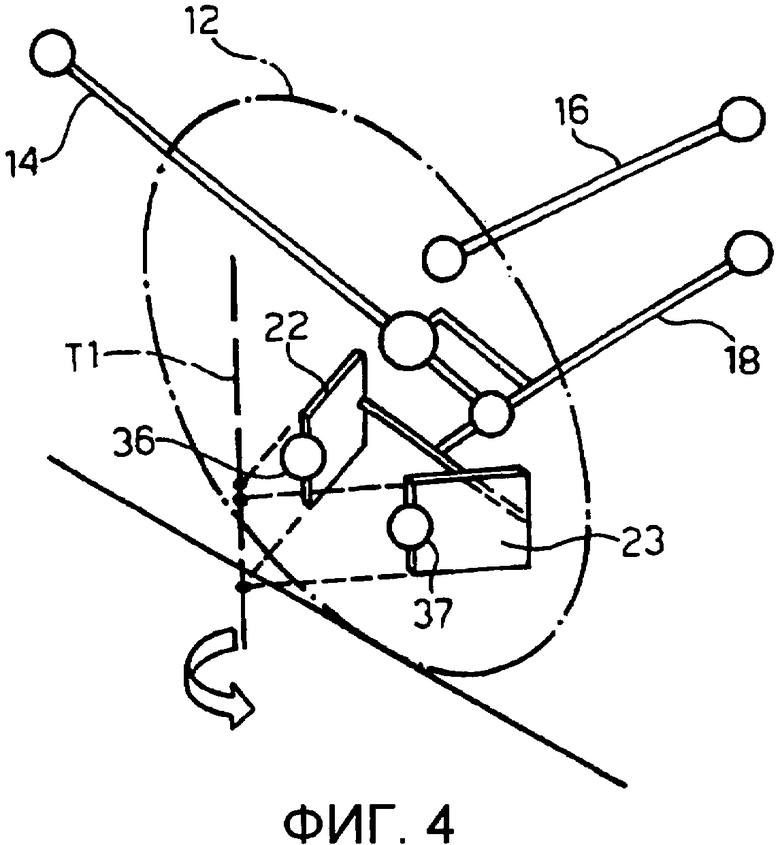
фиг.4 - это схематичная иллюстрация, аналогичная схематичной иллюстрации по фиг.1, которая показывает, в частности, конструкцию первой оси сдвига подвески;
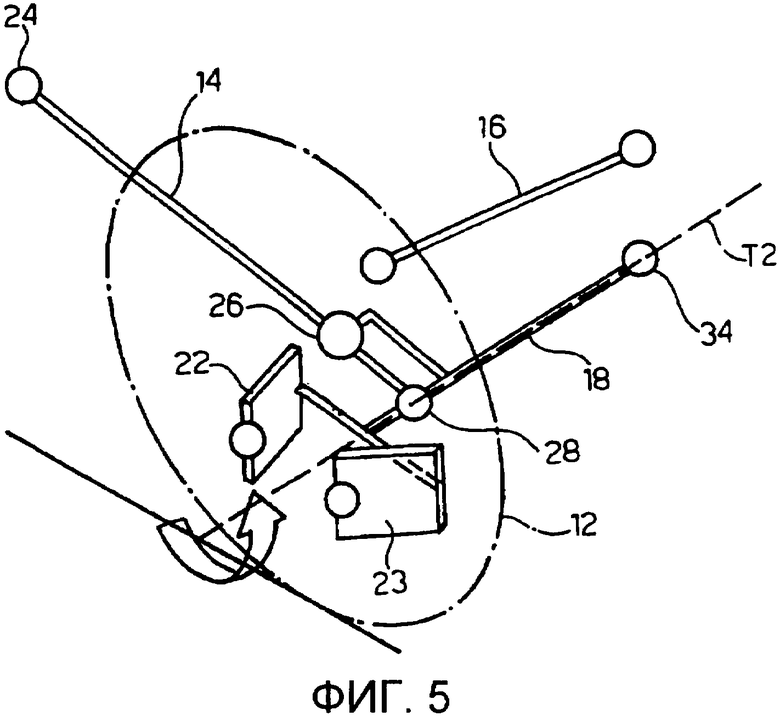
фиг.5 - это схематичная иллюстрация, аналогичная схематичной иллюстрации по фиг.1, которая показывает, в частности, конструкцию второй оси сдвига подвески;
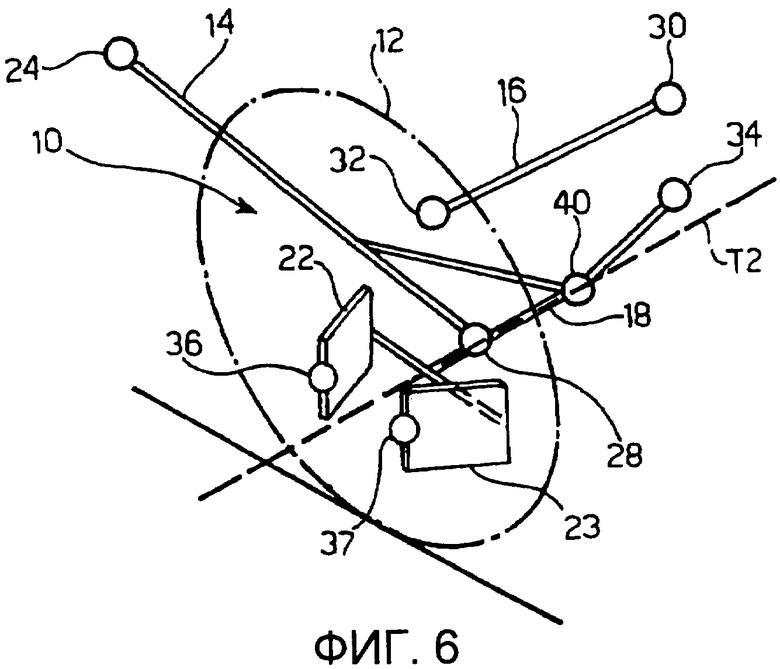
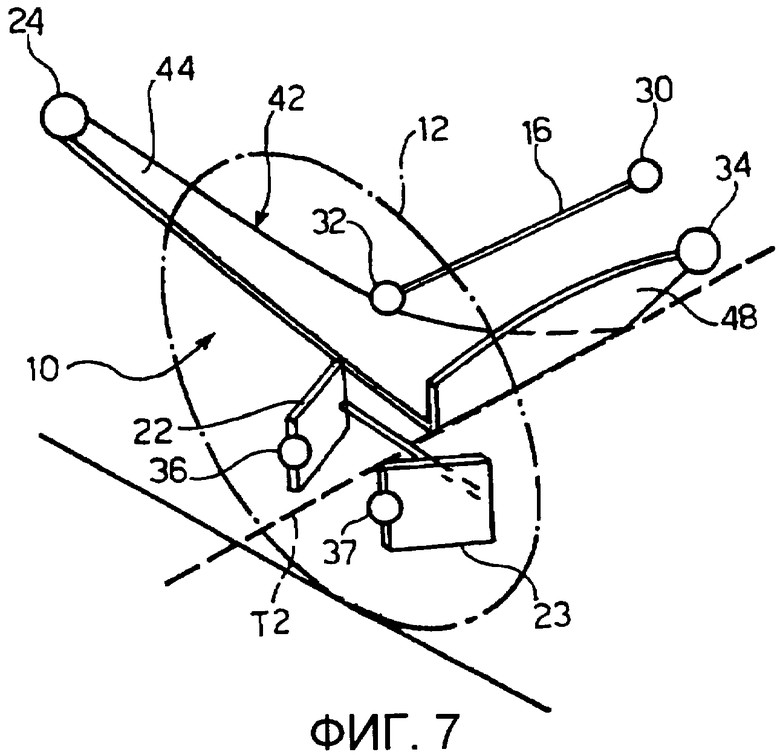
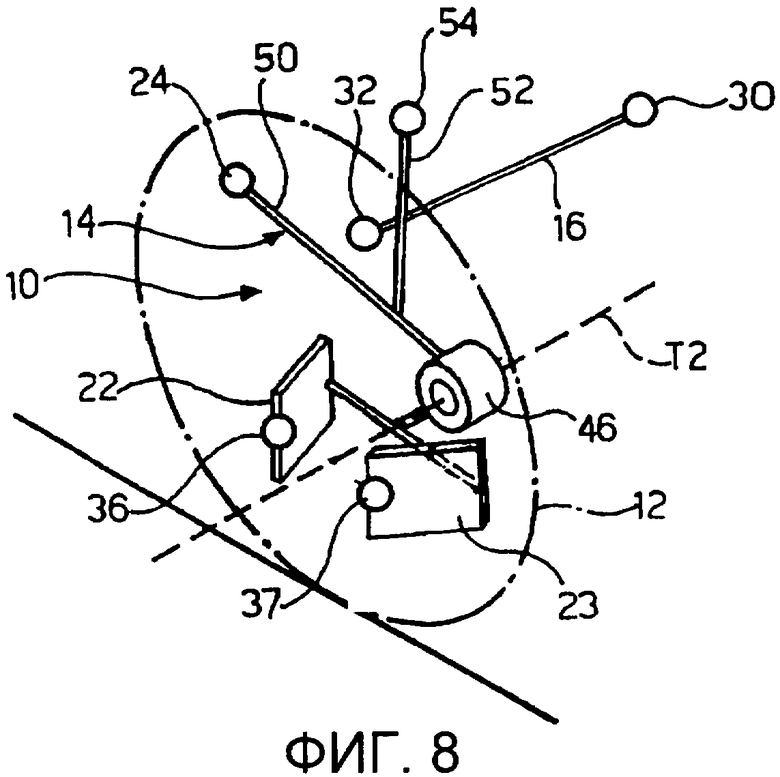
фиг.6-8 - это схематичные иллюстрации, каждая из которых показывает вариант осуществления независимой подвески для моторизованного транспортного средства согласно изобретению, который отличается от варианта осуществления по фиг.1 способом реализации второй оси сдвига;
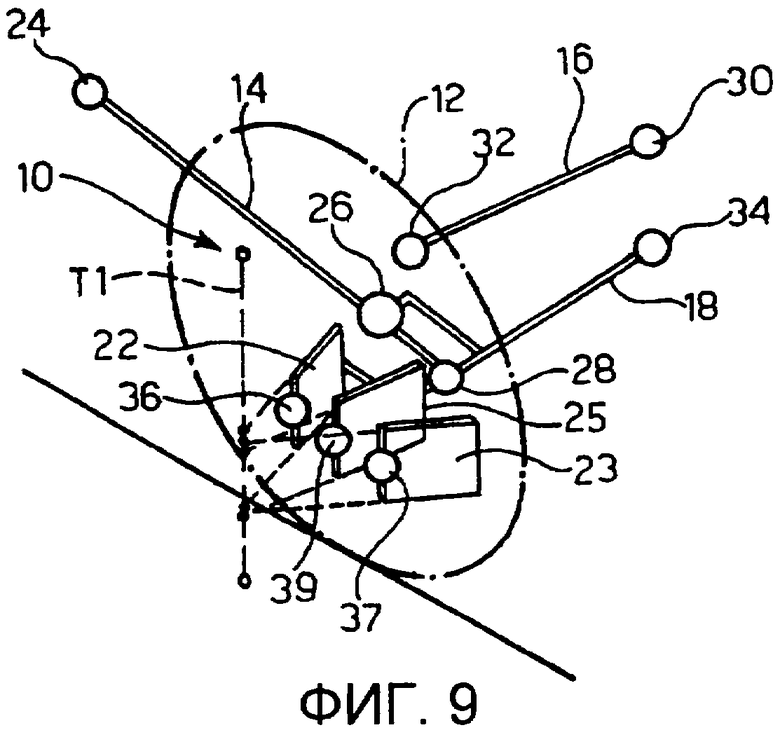
фиг.9 - это схематичная иллюстрация варианта осуществления независимой подвески для моторизованного транспортного средства согласно изобретению, который отличается от варианта осуществления по фиг.1 способом реализации первой оси сдвига;
фиг.10-14 - это схематичные иллюстрации, каждая из которых показывает вариант осуществления независимой подвески для моторизованного транспортного средства согласно изобретению, который отличается от варианта осуществления по фиг.1 дополнительными штангами, отличными от тех, которые задают две оси сдвига подвески;
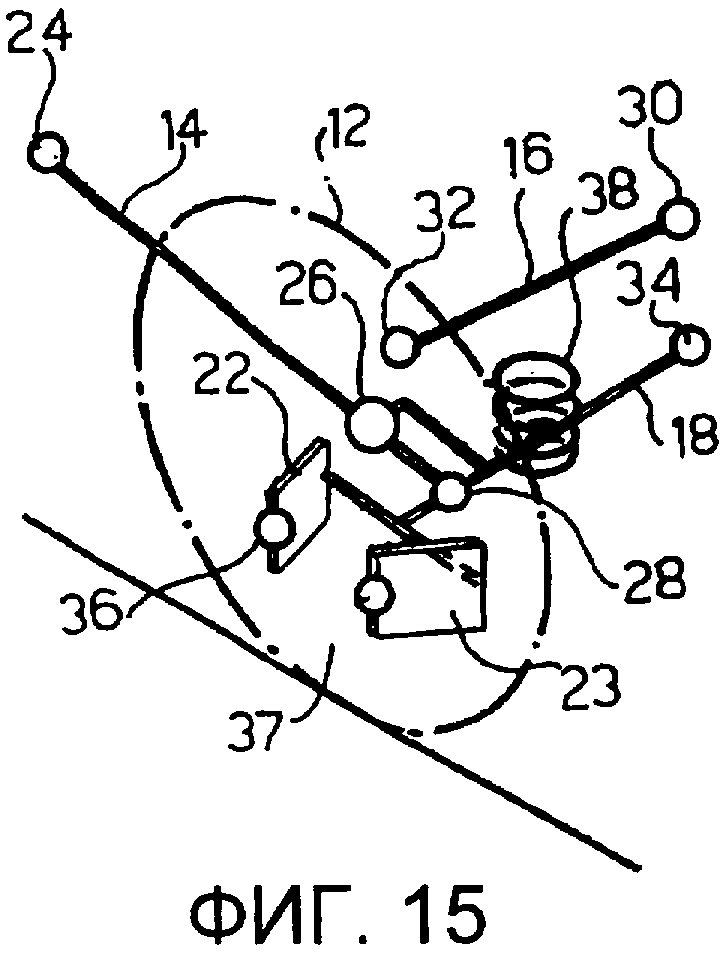
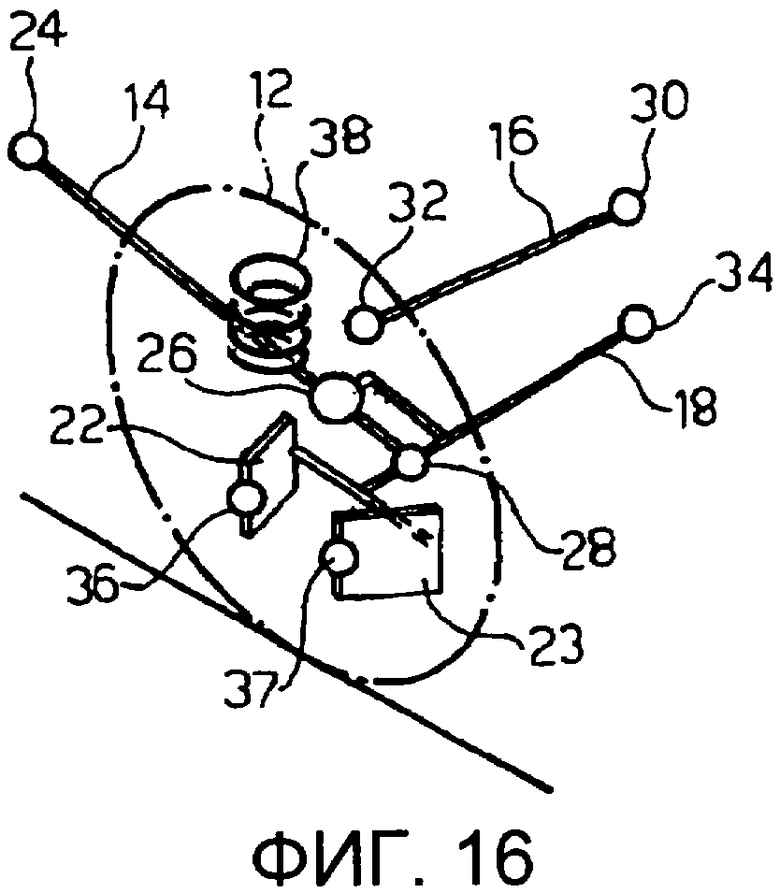
фиг.15 и 16 - это схематичные иллюстрации, каждая из которых показывает возможную компоновку пружины подвески согласно варианту осуществления по фиг.1;
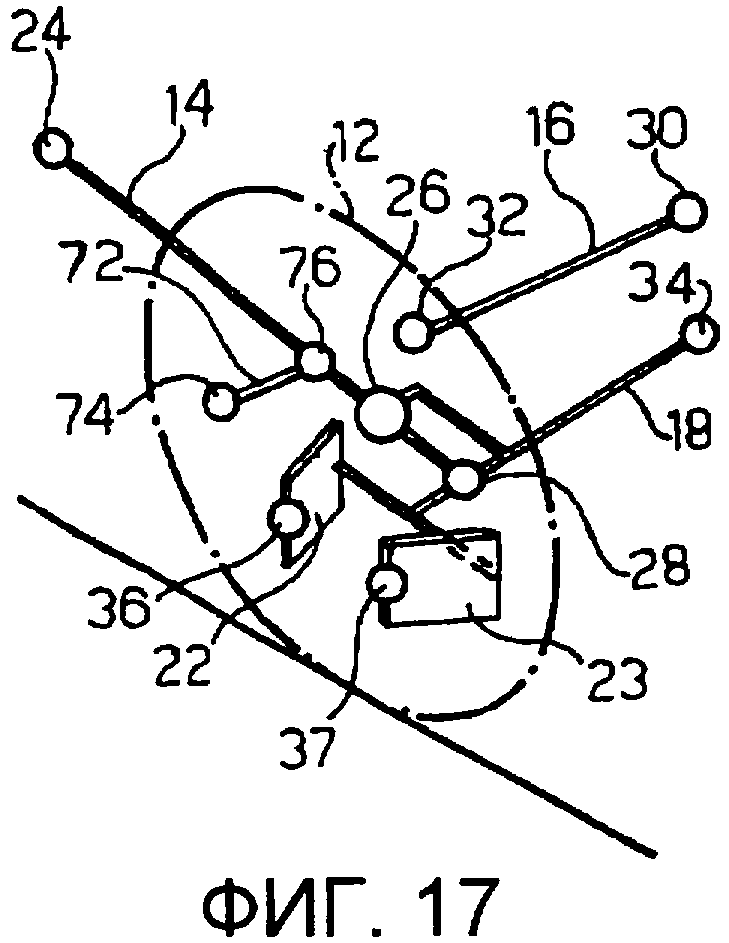
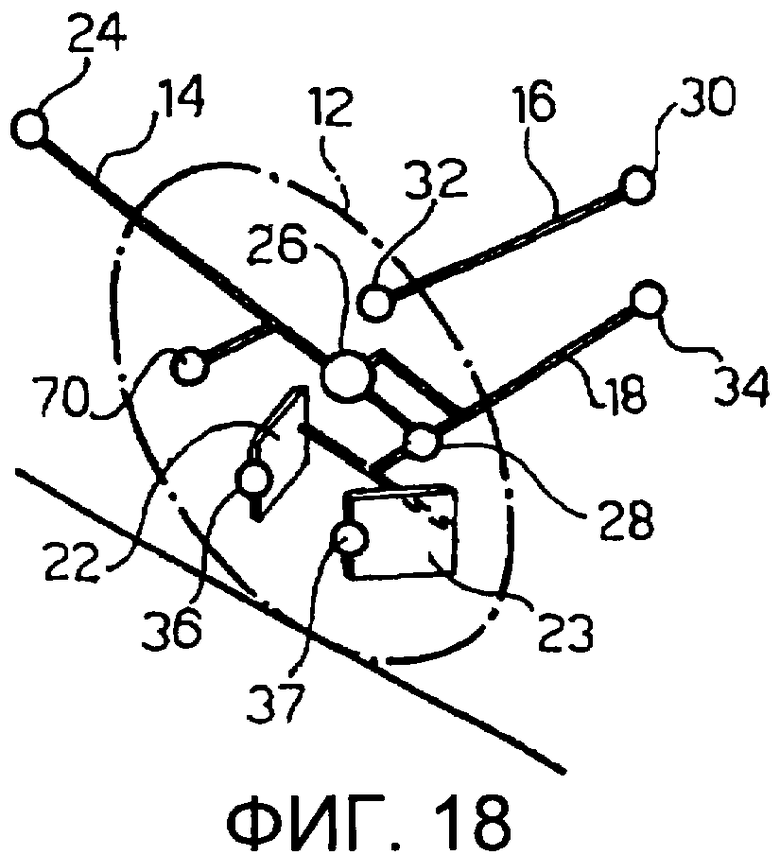
фиг.17 и 18 - это схематичные иллюстрации, каждая из которых показывает дополнительный вариант осуществления независимой подвески для моторизованного транспортного средства согласно изобретению; и
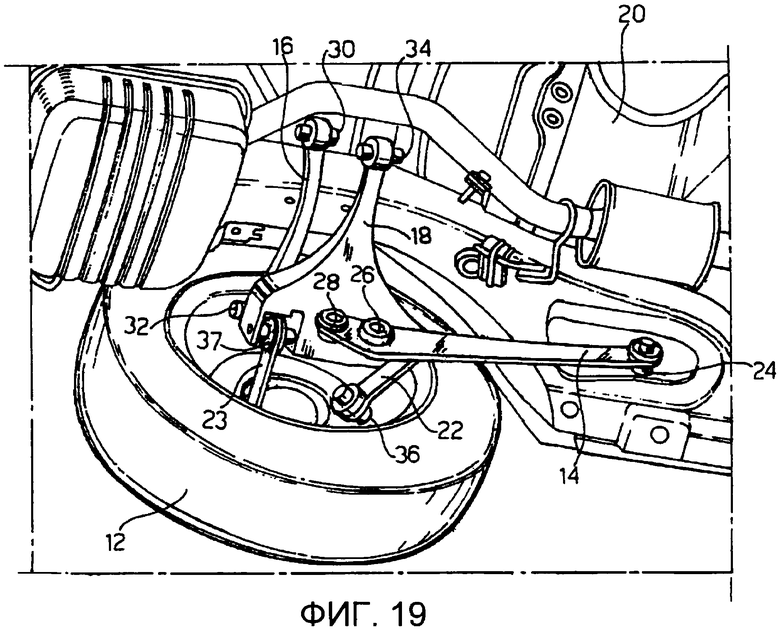
фиг.19 - это вид в перспективе снизу, который показывает вариант осуществления изобретения, предназначенный для задней подвески моторизованного транспортного средства.
В последующем описании и формуле изобретения такие термины, как "продольный" и "поперечный", "вертикальный" и "горизонтальный", "передний" и "задний", предназначены для того, чтобы ссылаться на установленное положение на моторизованном транспортном средстве.
Посредством ссылки сначала на фиг.1 и 19, цифра 10, в общем, указывает независимую подвеску для моторизованного транспортного средства, которая предназначена для того, чтобы соединять колесо 12, в данном случае заднее колесо, которым может быть либо ведущее колесо, либо неведущее колесо, с корпусом 20 транспортного средства (частично проиллюстрированным на фиг.19). Подвеска 10 в своей основе содержит продольный рычаг 14, поперечную верхнюю тягу 16 (тягу регулировки развала колес) и поперечный нижний рычаг 18, все из которых являются жесткими компонентами, и пару гибких элементов 22 и 23 подобных пластинчатому рычагу, которые соединяют поперечный нижний рычаг 18 с держателем (известной как таковой и не проиллюстрированной) колеса 12.
Продольный рычаг 14 шарнирно сочленен у переднего конца с корпусом 20 транспортного средства посредством втулки 24, а у задней части с поперечным рычагом 18 посредством пары втулок 26 и 28, первая из которых размещается в промежуточной точке продольного рычага 14, тогда как вторая размещается у заднего конца этого рычага. Поперечная верхняя тяга 16 шарнирно сочленена у своего перпендикулярного внутреннего конца с корпусом 20 транспортного средства посредством втулки 30, а у перпендикулярного внешнего конца с держателем колеса посредством втулки 32. Поперечный нижний рычаг 18 шарнирно сочленен у перпендикулярного внутреннего конца с корпусом 20 транспортного средства посредством втулки 34 и соединен у перпендикулярного внешнего конца с держателем колеса посредством двух гибких пластин 22 и 23. В варианте осуществления по фиг.1 гибкие пластины 22 и 23 крепятся у своих перпендикулярных внутренних концов к поперечному нижнему рычагу 18 и шарнирно сочленены у своих перпендикулярных внутренних концов с держателем колеса посредством соответствующих втулок 36 и 37. В варианте осуществления по фиг.19, с другой стороны, один из двух гибких пластинчатых рычагов, в данном случае задний пластинчатый рычаг 23, шарнирно сочленен у своего перпендикулярного внутреннего конца с поперечным нижним рычагом 18 посредством втулки 37 и крепится у своего перпендикулярного внешнего конца к держателю колеса.
Все вышеупомянутые втулки являются жесткими, не считая втулки 26 между продольным рычагом 14 и поперечным нижним рычагом 18, которая задает характеристику продольной податливости подвески.
Вышепроиллюстрированная архитектура подвески задает эластичную систему, характеристики которой под нагрузкой определяются посредством компоновки двух осей сдвига T1 и T2 (фиг.2 и 3), при этом термин ось сдвига относится к оси, вокруг которой эластичная система имеет очень низкую вращательную жесткость в отношении двух других ортогональных направлений. Ось сдвига, таким образом, представляет геометрическое место точек наибольшей поступательной жесткости относительно сил, действующих на эластичную систему в направлении, перпендикулярном оси, поскольку любая другая сила, не проходящая через эту ось, вызывает вращение, которое приводит к дополнительной эластичной податливости системы в точке применения этой силы.
Другими словами, каждая ось сдвига может рассматриваться как эластичный шарнир из комплекта рычагов и тяг, который соединяет держатель колеса с корпусом транспортного средства. Этот эластичный шарнир, таким образом, задает ось, вокруг которой стремится вращаться держатель колеса в отношении корпуса транспортного средства, когда он подвергается внешней силе. В настоящем случае, эластичные характеристики подвески задаются посредством двух осей сдвига, действующих последовательно друг с другом таким образом, что когда держатель колеса подвергается внешней силе, перпендикулярной этим двум осям, ее смещение происходит вследствие комбинации вращений вокруг двух осей сдвига.
Со ссылкой, в частности, на фиг.2 и 3, в варианте осуществления, проиллюстрированном в данном документе (который предназначен для задней подвески транспортного средства, как упоминалось выше), две оси сдвига T1 и T2 размещены по существу в поперечной вертикальной плоскости. Первая ось сдвига T1 проходит по существу вертикально вне транспортного средства (продольная срединная плоскость транспортного средства обозначается CP), тогда как вторая ось сдвига T2 проходит по существу горизонтально на высоте, состоящей между землей G и центром колеса C. Горизонтальная ось сдвига T2 имеет меньшую жесткость на кручение, чем жесткость на кручение вертикальной оси сдвига T1. Это означает, что сила, которая направлена перпендикулярно плоскости, заданной посредством двух осей сдвига T1 и T2, и применяется к держателю колеса в точке, равноудаленной от этих осей, вызывает меньшее угловое смещение вокруг оси T1, чем вокруг оси T2. Тем не менее, также в этом случае результирующее смещение держателя колеса является суммой этих двух угловых смещений.
Специальная компоновка двух осей сдвига T1 и T2, показанная на фиг.2 и 3, соответствует эластокинематическим требованиям подвески следующим образом.
Во-первых, вторая ось сдвига с меньшей жесткостью на кручение T2 (горизонтальная ось) предоставляет требуемую высокую продольную податливость держателя колеса в центре колеса, чтобы обеспечить оптимальные характеристики комфортабельности подвески.
Во-вторых, жесткость на кручение двух осей сдвига выбирается надлежащим образом в зависимости от расстояния осей сдвига от центра колеса таким образом, чтобы компоненты вокруг вертикальной оси вращений вокруг двух осей сдвига (т.е. компоненты, которые совместно составляют изменение схождения колес) компенсировали друг друга в случае ударной или тяговой продольной силы IF в центре колеса, но суммировались в случае тормозной продольной силы BF в пятне контакта. Таким образом, требование высокой степени схождения колес под действием тормозных сил и в то же время минимального изменения схождения колес под действием тяговых или ударных сил может быть удовлетворено.
Тем не менее, можно с помощью подвески согласно изобретению удовлетворять требования, отличные от обозначенных выше, посредством надлежащего периодического задания ориентации двух осей сдвига.
В-третьих, в силу размещения вертикальной оси сдвига с большей жесткостью на кручение T1 позади пятна контакта относительно направления движения транспортного средства (обозначенного SM на фиг.2) достигается эффект схождения колес под действием сил подруливания (обозначенных CF на фиг.2). Поскольку вторая ось сдвига T2 по существу параллельна силам подруливания, ее наличие не снижает существенно доступную поперечную жесткость в пятне контакта. При условии, что первая ось сдвига T1 не размещается слишком далеко от пятна контакта колеса (например, на расстоянии 80-100 мм) и имеет жесткость на кручение, подходящую для предоставления требуемого изменения схождения колес под действием сил подруливания, то держатель колеса испытывает требуемую высокую продольную жесткость в пятне контакта.
Фиг.4 и 5 иллюстрируют то, как архитектура подвески, описанная выше, задает две оси сдвига T1 и T2.
Втулки 34 и 28, посредством которых поперечный рычаг 18 соединяется с корпусом транспортного средства и с продольным рычагом 14 соответственно, являются жесткими резиновыми втулками, тогда как втулки 26, посредством которых продольный рычаг 14 соединяется с поперечным рычагом 18, являются гибкими резиновыми втулками. Следовательно, поперечный рычаг 18 имеет возможность вращаться вокруг оси, проходящей через две втулки 34 и 28, с очень небольшим эластичным сопротивлением. Эта ось, следовательно, задает вторую ось сдвига с меньшей жесткостью на кручение T2, которая ориентирована по существу горизонтально и поперечно. Поскольку втулки 24, 28 и 34 все являются жесткими втулками, эта ось сдвига является очень жесткой для сил, проходящих через ось, но очень податливой на кручение (т.е. в случае сил, не проходящих через ось).
Чтобы обеспечить контроль эластокинематических характеристик подвески, необходим точный контроль жесткости на кручение вокруг второй оси сдвига T2. Это достигается посредством второго соединения между поперечным рычагом 18 и продольным рычагом 14 через втулку 26. Единственная функция втулки 26 заключается в том, чтобы регулировать (посредством своей жесткости примерно в вертикальном направлении) жесткость на кручение оси сдвига T2. Поскольку вторая ось сдвига T2 гораздо менее жесткая при вращении, чем первая ось сдвига T1, требуемая характеристика продольной жесткости подвески заключена во втулке 26. Более того, втулка 26 подвергается минимальной нагрузке при приложении сил, возникающих при повороте, и, следовательно, ее гибкость не подвергает риску требуемую продольную жесткость подвески.
Первая ось сдвига с большей жесткостью на кручение T1 задается посредством пары пластинчатых рычагов 22, 23 на поперечном рычаге 18 (как показано на фиг.4), поскольку она геометрически сконструирована как пересечение между плоскостями двух пластинчатых рычагов. Посредством надлежащего выбора ориентации двух пластинчатых рычагов 22 и 23, следовательно, можно получить требуемую ориентацию этой первой оси сдвига T1, тогда как жесткость на кручение оси определяется посредством изгибной жесткости двух пластинчатых рычагов. При условии, что втулки 36 и 37, которые соединяют два пластинчатых рычага 22 и 23 с держателем колеса, являются достаточно жесткими, и два пластинчатых рычага имеют высокое отношение плоскостной жесткости на изгиб к нормально-плоскостной жесткости на изгиб, то подвеска имеет высокое отношение жесткости на кручение вокруг первой оси сдвига T1 к поступательной жесткости вдоль этой оси.
Как упоминалось выше, характеристики подвески таковы, что смещение держателя колеса под нагрузкой задается посредством наложенных вращений вокруг двух осей сдвига T1 и T2. Чем в большей степени примерно параллельно размещена тяга 16 регулировки развала ко второй оси сдвига T2 и проходит через первую ось сдвига T1, тем более допустимой является эта идея.
Что касается сил, действующих на подвеску, следует отметить, что продольные характеристики подвески в держателе колеса слабо связаны с поперечными характеристиками. Силы, возникающие при повороте, не проходят через гибкую втулку 26 и, не считая податливости на кручение вокруг вертикального направления (предоставленного посредством первой оси сдвига T1), необходимого для того, чтобы генерировать желательный эффект схождения колес под действием сил, возникающих при повороте, нет других паразитических податливостей, допускающих уменьшение продольной жесткости в пятне контакта.
Далее иллюстрируются основные преимущества независимой подвески согласно изобретению.
Во-первых, основное преимущество относительно традиционных архитектур подвески состоит в относительно небольших затратах, в частности, по сравнению с высокой предоставляемой эластокинематической характеристикой, которая, по сути, исходит из-за снижения сложности конструкции. Благодаря высокой гибкости конфигурации подвески, предоставляемой посредством использования двух осей сдвига, эластокинематическая характеристика подвески, фактически, очень высока.
Поскольку продольная гибкость системы не зависит полностью от втулки 26, которая соединяет продольный рычаг 14 с поперечным рычагом 18, гораздо большая продольная подвижность колеса может быть получена без уменьшения, тем самым, продольной жесткости или способности к пассивному подруливанию. Высокая "эффективность" осей сдвига T1 и T2, т.е. высокое отношение жесткости на кручение подвески вокруг каждой оси к поступательной жесткости подвески в ответ на силу, проходящую через ось, дает возможность втулке 26 иметь меньшее передаточное отношение рычажного механизма в отношении продольного перемещения центра колеса. Следовательно, втулка 26 может быть более жесткой и более компактной и, таким образом, может изготовляться как стандартная резиновая втулка радиального действия. Преимущественно, втулка 26 может содержать гидравлический демпфер.
Слабая связанность продольных нагрузок и поперечных нагрузок, а следовательно, слабая связанность эластокинематических характеристик подвески делает производство транспортного средства более простым и быстрым. Более того, при такой архитектуре снижается неподрессоренная масса транспортного средства.
Что касается установки на транспортное средство, тот факт, что подвеска использует крепежную позицию к корпусу транспортного средства (втулку 24, которая соединяет продольный рычаг 14 с корпусом транспортного средства), стандартную для большинства пассажирских транспортных средств малого и среднего класса, которые, как правило, применяют задние подвески, имеющие изогнутые или продольные ведомые рычаги, влечет за собой минимальные модификации в структуре транспортного средства для установки подвески на существующие платформы.
Предлагаемая структура подвески, безусловно, может быть использована для ведущих, а также неведущих колес. Это обусловлено, в частности, большой свободой в позиционировании пружины и амортизатора, предоставляемой за счет наличия двух жестких нижних рычагов (продольного рычага 14 и поперечного рычага 18).
Простые пути нагружения подвески помогают в ее индустриализации. Например, продольный рычаг 14 подвергается только нагрузкам в вертикальной плоскости, проходящим через втулки 24, 26 и 28 и, следовательно, может получаться посредством штамповки. Поперечный рычаг 18 также может быть легко получен посредством моно- или двухблочной штамповки. Оба этих компонента могут иметь форму пластинчатых рычагов. Поперечная тяга регулировки развала может быть изготовлена с помощью любой из недорогих технологий, в настоящее время используемых для производства таких компонентов. Все втулки, за исключением втулки 26, которая соединяет продольный и поперечный рычаги, могут быть стандартными жесткими втулками.
Предоставление трех точек крепления держателя колеса к подвеске упрощает процессы сборки и процессы статичной регулировки развала/схождения.
Наконец, применение этих гибких пластинчатых рычагов повышает сопротивление разрушению под действием неправильных поперечных нагрузок вследствие перекашивания.
Три возможных варианта осуществления независимой подвески для транспортного средства согласно изобретению, которые отличаются от предпочтительного варианта осуществления, описанного выше, способом реализации второй оси сдвига T2 (горизонтальной оси), проиллюстрированы на фиг.6-8, на которых части и элементы, идентичные или соответствующие частям и элементам предшествующих чертежей, даются с теми же номерами ссылок.
В подвеске, показанной на фиг.6, вторая ось сдвига T2 задается посредством пары втулок 28 и 40, которые соединяют продольный рычаг 14 с поперечным рычагом 18. В этом случае, поскольку втулка 34 между поперечным рычагом 18 и корпусом транспортного средства больше не требуется для того, чтобы задавать ось сдвига, ее позиция может свободно выбираться. Следовательно, втулка 34 не должна быть выровнена с двумя втулками 28 и 40, как показано на фиг.6.
В подвеске, показанной на фиг.7, вторая ось сдвига T2 задается посредством характеристик податливости гибкого нижнего рычага, в общем, обозначенного 42. Нижний рычаг 42 содержит продольную часть 44 и поперечную часть 48, соответствующие продольному рычагу 14 и поперечному рычагу 18 соответственно, подвески по фиг.1. В конкретном варианте осуществления, проиллюстрированном на фиг.7, две части 44 и 48 сформированы как по существу плоские элементы, пересекающиеся вдоль оси. В этом случае, следовательно, ось пересечения между двумя по существу плоскими элементами 44 и 48 задает вторую ось сдвига T2 подвески. При такой конфигурации жесткость на изгиб по существу плоских элементов 44 и 48 позволяет задавать жесткость на кручение подвески вокруг второй оси сдвига T2.
В подвеске, показанной на фиг.8, вторая ось сдвига T2 задается посредством одной втулки 46 (или посредством нескольких втулок, согласно дополнительному непроиллюстрированному варианту осуществления), которая устанавливается на конце продольного рычага 14 и поддерживает два пластинчатых рычага 22 и 23, которые задают первую ось сдвига T1. Поперечный рычаг здесь опущен, и продольный рычаг 14 имеет первую продольную часть 50 и вторую наклонную часть 52, сочлененные с корпусом транспортного средства посредством соответствующих втулок 24 и 54.
Другой возможный вариант осуществления независимой подвески для транспортного средства согласно изобретению, который отличается от предпочтительного варианта осуществления, описанного выше, способом реализации первой оси сдвига T1, проиллюстрирован на фиг.9, на котором части и элементы, идентичные или соответствующие частям и элементам предшествующих чертежей, даются с теми же номерами ссылок.
Согласно этому варианту осуществления, предусмотрен третий пластинчатый рычаг 25, который размещается в плоскости, проходящей через первую ось сдвига T1, так чтобы действовать параллельно с первыми двумя пластинчатыми рычагами 22 и 23, и соединен с держателем колеса посредством втулки 39. Очевидно, также можно предоставлять большее число пластинчатых рычагов. Также очевидно, что этот вариант осуществления может объединяться с любым из трех вариантов осуществления, проиллюстрированных на фиг.6-8.
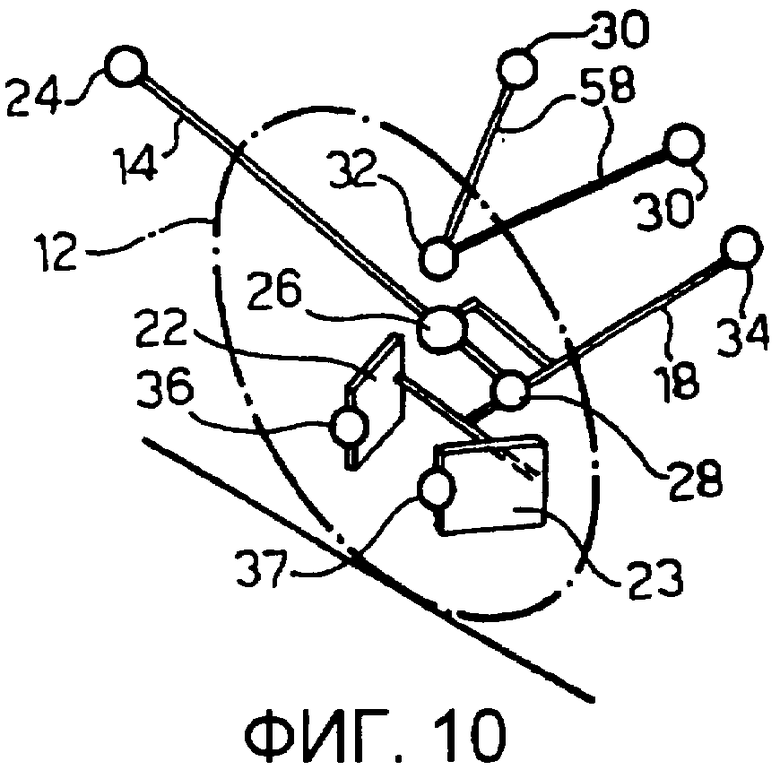
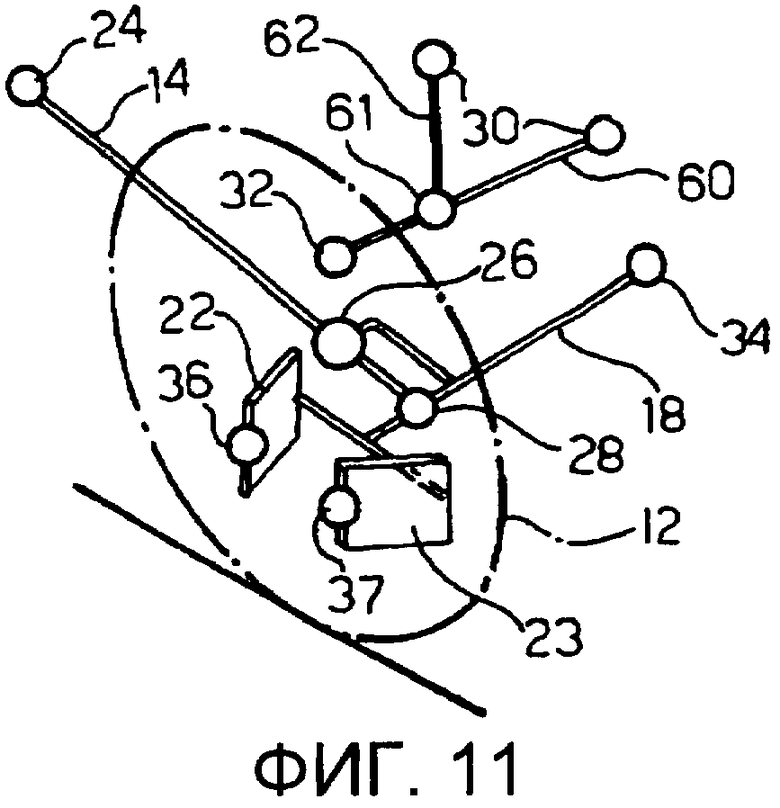
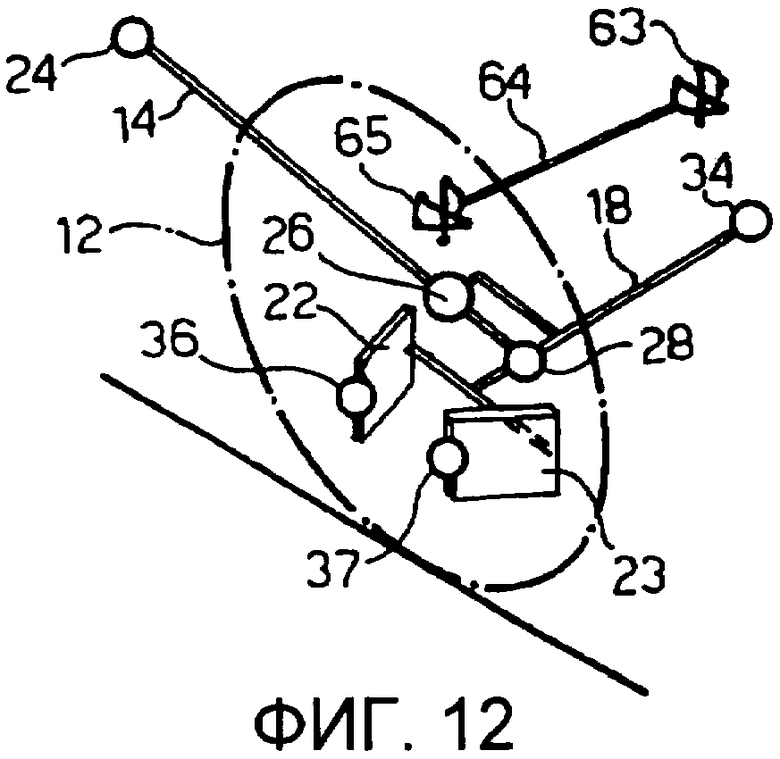
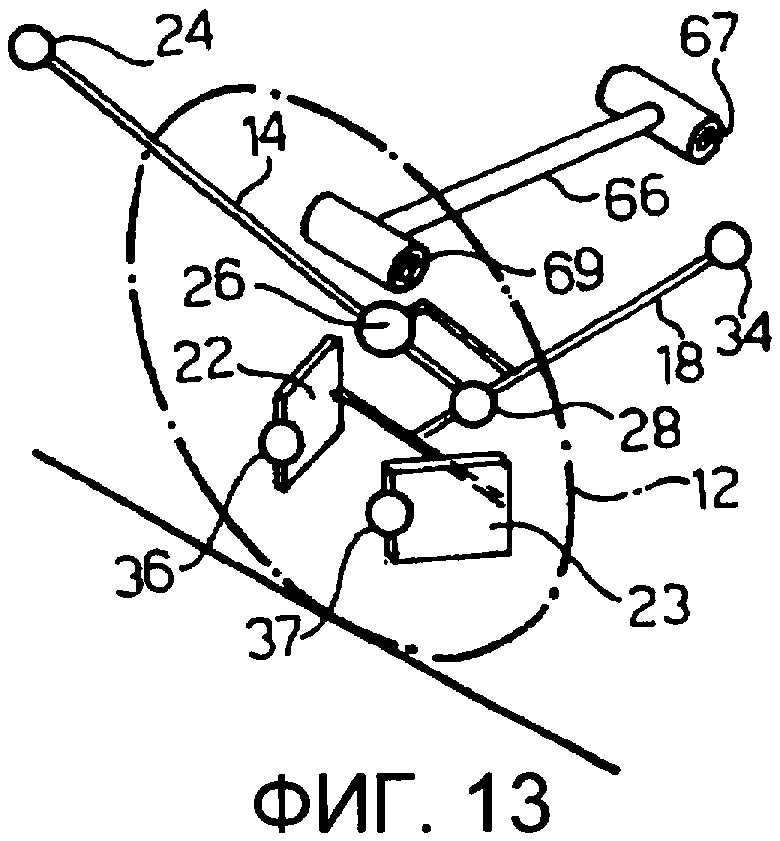
Фиг.10-14 показывают дополнительные варианты осуществления независимой подвески для транспортного средства согласно изобретению, которые отличаются от варианта осуществления по фиг.1 дополнительными штангами, отличными от тех, которые задают две оси сдвига подвески. На этих чертежах элементы, идентичные или соответствующие элементам подвески по фиг.1, обозначаются теми же номерами ссылок.
В варианте осуществления по фиг.10 поперечный треугольный рычаг 58, сочлененный с корпусом транспортного средства посредством пары втулок 30 и с держателем колеса 12 посредством втулки 32, предусмотрен вместо поперечной тяги 16. В варианте осуществления по фиг.11 предусмотрены первая тяга 60, сочлененная посредством втулок 30 и 32 с корпусом транспортного средства и держателем колеса 12 соответственно, и вторая тяга 62, сочлененная с корпусом транспортного средства посредством втулки 30 и соединенная с первым рычагом 60 посредством втулки 61. Использование поперечного треугольного рычага или двух тяг, соединенных друг с другом, предоставляет дополнительный контроль продольной податливости подвески, который преимущественно затрагивает вращение вокруг второй оси сдвига T2 для продольной силы, хотя также оказывает влияние на вращение вокруг первой оси сдвига T1.
Два варианта осуществления, проиллюстрированные на фиг.12 и на фиг.13, предоставляют использование штанг, которые также управляют степенями свободы на кручение помимо обычной поступательной степени свободы. В примере по фиг.12 используется штанга 64, которая сочленена у своих концов посредством универсальных шарниров 63 и 65 с корпусом транспортного средства и держателем колеса 12 соответственно, и допускает предоставление дополнительного ограничения на кручение вокруг собственной оси, тем самым способствуя вращательной жесткости подвески вокруг второй оси сдвига T2, тем не менее, без какого-либо влияния на первую ось сдвига T1. В примере по фиг.13 используется штанга 66, такая как описанная в Международной патентной публикаци 0438 PCT/IB2004/001196 от имени заявителя, которая сочленена к своих концов посредством втулок 67 и 69 с корпусом транспортного средства и держателем колеса 12 соответственно. Штанга 66 также способствует вращательной жесткости подвески вокруг поперечной оси и вокруг вертикальной оси, помимо ограничения поступательной степени свободы вдоль собственной оси.
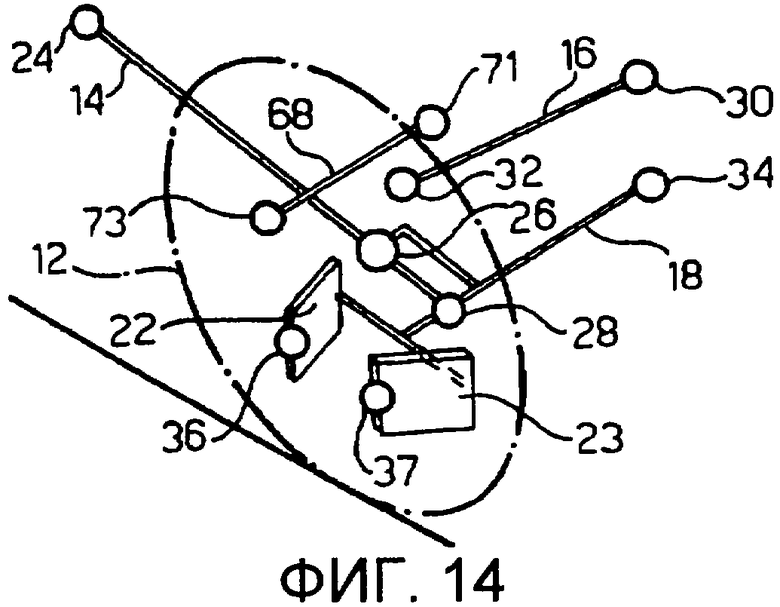
Вариант осуществления, проиллюстрированный на фиг.14, отличается от варианта осуществления добавлением, рядом с тягой 16 регулировки развала колес, поперечной тяги 68 регулировки схождения колес, которая сочленена у своих концов посредством втулок 71 и 73, с корпусом транспортного средства и держателем колеса 12 соответственно, и служит для того, чтобы исправлять склонность к обратному схождению колес подвески в ходе ударно/откатного движения колеса для того, чтобы получить эффект антиподъема. Этот эффект изменения схождения колес за счет добавления поперечной тяги 68 имеет место вокруг первой оси сдвига T1, заданной посредством пластинчатых рычагов 22 и 23. Следовательно, эти рычаги должны быть достаточно гибкими для того, чтобы поглощать прогиб, вызываемый вышеуказанным эффектом, без подвергания избыточным изгибным напряжениям.
В подвеске по изобретению нет ограничений на размещение пружины и амортизатора, которые могут крепиться, отдельно или как часть пружинно-амортизаторной стойки, к любой из штанг подвески или непосредственно к держателю колеса. Конкретно преимущественной является установка пружины (обозначенной 38) непосредственно на один из нижних рычагов, т.е. на поперечный рычаг 18 (как показано на фиг.17) или на продольный рычаг 14 (как показано на фиг.18). Амортизатор также может быть установлен на любой из компонентов подвески, хотя предпочтительно устанавливать его непосредственно на держатель колеса, с тем чтобы улучшить контроль демпфирования и снизить нагрузки на компонент в ходе работы.
Различные способы, которыми может управляться вращательная жесткость подвески вокруг двух осей сдвига, перечислены ниже.
Вращательная жесткость вокруг первой оси сдвига T1 может управляться посредством:
a) изгибной жесткости гибких пластинчатых рычагов (двух пластинчатых рычагов 22 и 23 в вариантах осуществления по фиг.1 и фиг.6-8 и трех пластинчатых рычагов 22, 23 и 25 в варианте осуществления по фиг.9); или
b) дополнительного соединения держателя колеса с одним из двух нижних рычагов (продольным рычагом 14 в вариантах осуществления, проиллюстрированных на фиг.17 и 18), полученного либо непосредственно с втулкой 70 (фиг.17), либо с надлежащей штангой 72 (фиг.18), сочлененной у конца с держателем колеса посредством втулки 74, а у противоположного конца с продольным рычагом 14 посредством втулки 76.
Вращательная жесткость вокруг второй оси сдвига T2 может управляться посредством:
a) дополнительной втулки между продольным рычагом 14 и поперечным рычагом 18, такой как, например, втулка 26 варианта осуществления по фиг.1;
b) жесткости на кручение втулок, которые задают вторую ось сдвига T2, т.е. втулок 28 и 34 в варианте осуществления по фиг.1, втулок 28 и 40 в варианте осуществления по фиг.6, и втулки 46 в варианте осуществления по фиг.8;
c) продольного ограничения, применяемого к держателю колеса, такого как, например, предоставляемый посредством поперечного треугольного рычага 58 в варианте осуществления по фиг.12 или двух взаимно соединенных тяг 60 и 62 в варианте осуществления по фиг.11; или
d) изгибной жесткости гибкого нижнего рычага 42 в варианте осуществления по фиг.7.
Разумеется, принципы изобретения остаются неизменными, варианты осуществления и подробности изготовления могут существенно отличаться от описанных и проиллюстрированных только в качестве неограничительного примера.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЗАВИСИМАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2517274C2 |
| ЗАДНИЙ МОСТ АВТОМОБИЛЯ С ПОДВЕСКОЙ КОЛЕС НА ПРОДОЛЬНЫХ РЫЧАГАХ, СОЕДИНЕННЫХ ПОПЕРЕЧНОЙ БАЛКОЙ | 2010 |
|
RU2526323C2 |
| ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2509657C2 |
| РЫЧАГ АВТОМОБИЛЬНОЙ НЕЗАВИСИМОЙ ПОДВЕСКИ И АВТОМОБИЛЬНАЯ НЕЗАВИСИМАЯ ПОДВЕСКА, СОДЕРЖАЩАЯ ТАКОЙ РЫЧАГ | 2007 |
|
RU2412829C2 |
| ПОДВЕСКА СО СКРУЧИВАЮЩЕЙСЯ БАЛКОЙ | 2014 |
|
RU2668510C2 |
| РЫЧАГ ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2465151C2 |
| УСТРОЙСТВО ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2418691C1 |
| РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2624281C2 |
| УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ ПОВЕДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПРИ РУЛЕНИИ | 2011 |
|
RU2524525C1 |
| ПОДВЕСКА ЗАДНИХ КОЛЕС И МОТОРНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2619147C2 |
Изобретение относится к области транспортного машиностроения. Независимая подвеска моторизованного транспортного средства содержит один нижний рычаг, соединенный с корпусом транспортного средства, и одну верхнюю штангу, соединенную с корпусом транспортного средства. На нижнем рычаге расположено два пластинчатых гибких элемента, которые соединены с держателем ступицы колеса. Плоскости гибких элементов пересекаются вдоль одной общей оси предварительно определенной ориентации, задающей первую ось сдвига подвески. Нижний рычаг соединен с корпусом транспортного средства посредством пары втулок, а именно первой втулки и второй втулки. Нижний рычаг сконфигурирован так, чтобы задавать вторую ось сдвига предварительно определенной ориентации, действующую последовательно с первой осью, таким образом, что держатель ступицы колеса подвергается внешней силе, действующей в горизонтальной плоскости. Нижний рычаг включает продольный рычаг, соединенный с корпусом транспортного средства посредством первой втулки. Достигается улучшение эксплуатационных характеристик транспортного средства. 18 з.п. ф-лы, 19 ил.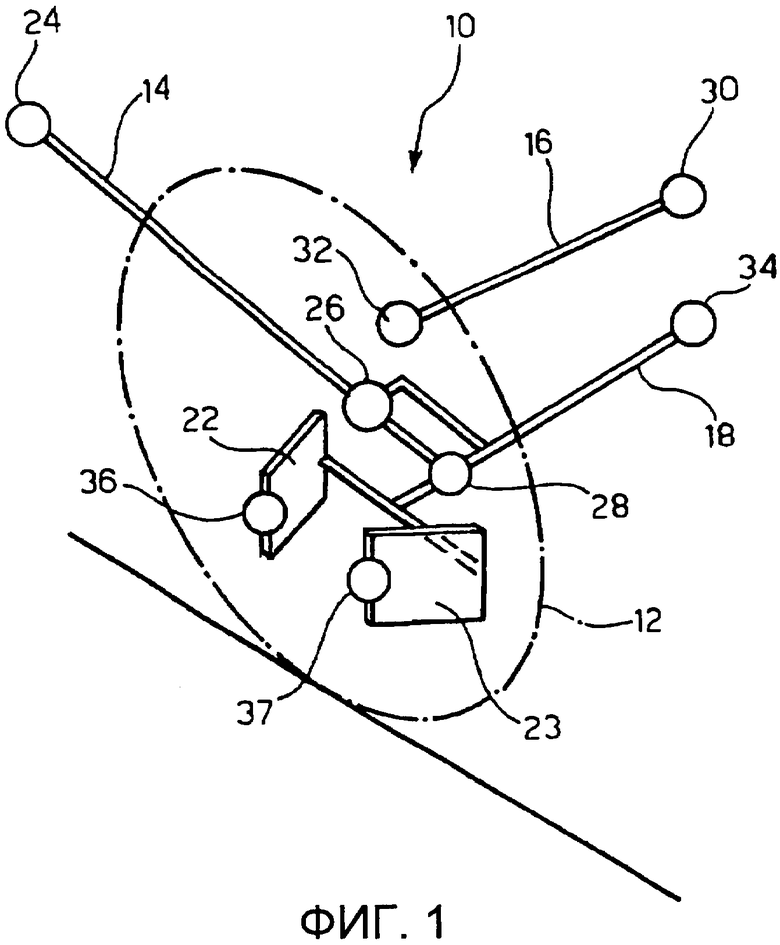
1. Независимая подвеска моторизованного транспортного средства для присоединения держателя ступицы колеса (12) транспортного средства к корпусу (20) транспортного средства, причем подвеска содержит, по меньшей мере, один нижний рычаг (14, 18; 42, 44, 48; 14, 50, 52), соединенный (24, 34; 24, 54) с корпусом (20) транспортного средства, и, по меньшей мере, одну верхнюю штангу (16; 58; 60, 62; 64; 66; 16, 68), соединенную (30; 63; 67; 30; 71) с корпусом (20) транспортного средства, при этом на упомянутом, по меньшей мере, одном нижнем рычаге (14, 18; 42, 44, 48; 14, 50, 52) расположено, по меньшей мере, два, по существу, пластинчатых гибких элемента (22, 23; 22, 23, 25), которые соединены (36, 37; 36, 37, 39) с держателем ступицы колеса (12) и плоскости которых пересекаются вдоль одной общей оси (Т1) предварительно определенной ориентации, задающей первую ось сдвига подвески; причем упомянутый, по меньшей мере, один нижний рычаг (14, 18; 42, 44, 48; 14, 50, 52) соединен с корпусом (20) транспортного средства посредством пары втулок (24, 34, 24, 54), а именно первой втулки (24) и второй втулки (34; 54), отличающаяся тем, что упомянутый, по меньшей мере, один нижний рычаг (14, 18; 42, 44, 48; 14, 50, 52) сконфигурирован так, чтобы задавать вторую ось сдвига (Т2) предварительно определенной ориентации, действующую последовательно с первой осью (Т1), таким образом, что, когда держатель ступицы колеса подвергается внешней силе, действующей, по существу, в горизонтальной плоскости, смещение держателя ступицы колеса получается из комбинации вращений держателя ступицы колеса вокруг двух осей сдвига (T1, T2), причем упомянутый, по меньшей мере, один нижний рычаг (14, 18; 42, 44, 48; 14, 50, 52) включает продольный рычаг (14; 44; 50), соединенный с корпусом (20) транспортного средства посредством первой втулки (24).
2. Подвеска по п.1, в которой две оси сдвига (T1, T2) размещены, по существу, в поперечной вертикальной плоскости.
3. Подвеска по п.1, в которой первая ось сдвига (T1) проходит, по существу, вертикально вне транспортного средства, а вторая ось сдвига (T2) проходит, по существу, горизонтально на высоте между землей (G) и центром (С) колеса (12).
4. Подвеска по п.3, имеющая большую жесткость на кручение вокруг первой оси сдвига (T1), чем жесткость на кручение вокруг второй оси сдвига (T2).
5. Подвеска по п.1, содержащая жесткий нижний продольный рычаг (14) и нижний поперечный рычаг (18), с которым соединяются упомянутые, по меньшей мере, два пластинчатых гибких элемента (22, 23; 22, 23, 25).
6. Подвеска по п.5, в которой продольный рычаг (14) шарнирно сочленен с поперечным рычагом (18) посредством третьей гибкой втулки (26), размещенной в промежуточной части продольного рычага (14), и посредством четвертой жесткой втулки (28), размещенной на конце этого рычага (14), и в которой поперечный рычаг (18) также шарнирно сочленен с корпусом транспортного средства посредством второй втулки (34), выполненной в виде жесткой втулки таким образом, чтобы вторая ось сдвига (T2) соответствовала оси, проходящей через вторую и четвертую втулки (34, 28).
7. Подвеска по п.5, в которой продольный рычаг (14) шарнирно сочленен с поперечным рычагом (18) посредством пары жестких втулок (28, 40) таким образом, чтобы ось, проходящая через упомянутую пару втулок (28, 40), соответствовала второй оси сдвига (T2).
8. Подвеска по п.1, содержащая один нижний рычаг (42), включающий в себя гибкое продольное ответвление (44) и гибкое поперечное ответвление (48), сформированные как, по существу, плоские элементы, которые пересекаются вдоль оси таким образом, чтобы вторая ось сдвига (Т2) подвески соответствовала оси пересечения между упомянутыми, по существу, плоскими элементами (44, 48).
9. Подвеска по п.1, содержащая:
один нижний рычаг (14), имеющий первое продольное ответвление (50) и второе наклонное ответвление (52), сочлененные с корпусом транспортного средства посредством первой и второй втулок (24, 54), и
по меньшей мере, одну втулку (46), которая устанавливается на нижний рычаг (14) и поддерживает упомянутые, по меньшей мере, два пластинчатых гибких элемента (22, 23; 22, 23, 25).
10. Подвеска по любому из пп.1-9, в которой упомянутая, по меньшей мере, одна верхняя штанга представляет собой поперечную тягу (16) регулировки развала, шарнирно сочлененную с корпусом транспортного средства и с держателем ступицы колеса (12) посредством соответствующих втулок (30, 32).
11. Подвеска по п.10, в которой поперечная тяга (16) является примерно параллельной ко второй оси сдвига (Т2) и проходит через первую ось сдвига (Т1).
12. Подвеска по любому из пп.1-9, в которой упомянутая, по меньшей мере, одна верхняя штанга представляет собой поперечный вильчатый рычаг (58), который шарнирно сочленен с корпусом транспортного средства посредством пары втулок (30) и с держателем колеса (12) посредством одной втулки (32).
13. Подвеска по любому из пп.1-9, в которой упомянутая, по меньшей мере, одна верхняя штанга содержит первую тягу (60), которая шарнирно сочленена посредством втулок (30, 32) с корпусом транспортного средства и держателем ступицы колеса (12) соответственно, и вторую тягу (62), которая шарнирно сочленена с корпусом транспортного средства посредством втулки (30) и соединена с первой тягой (60) посредством втулки (61).
14. Подвеска по любому из пп.1-9, в которой упомянутая, по меньшей мере, одна верхняя штанга представляет собой тягу (64; 66), которая шарнирно сочленена посредством втулок (63, 65; 67, 69) с корпусом транспортного средства и с держателем ступицы колеса (12) соответственно, и выполнена с возможностью управления поступательной степенью свободы вдоль собственной оси и, по меньшей мере, одной вращательной степенью свободы.
15. Подвеска по п.10, в которой упомянутая, по меньшей мере, одна верхняя штанга дополнительно содержит поперечную тягу (68) регулировки схождения колес, которая шарнирно сочленена посредством втулок (71, 73) с корпусом транспортного средства и держателем ступицы колеса (12) соответственно.
16. Подвеска по п.1, дополнительно содержащая пружину (38), установленную на упомянутом, по меньшей мере, одном нижнем рычаге (18; 14).
17. Подвеска по п.1, в которой упомянутый, по меньшей мере, один нижний рычаг (14) соединен с держателем ступицы колеса либо непосредственно с помощью втулки (70), либо с помощью штанги (72), шарнирно сочлененной (74, 76) на своих концах с нижним рычагом (14) и ступицей колеса.
18. Подвеска по любому из пп.1-8, в которой упомянутые, по меньшей мере, два пластинчатых гибких элемента (22, 23; 22, 23, 25) шарнирно сочленены у своих поперечных внешних концов с держателем ступицы колеса (12) посредством соответствующих втулок (36, 37; 36, 37, 39) и крепятся у своих поперечных внутренних концов к упомянутому, по меньшей мере, одному нижнему рычагу (18; 42).
19. Подвеска по любому из пп.1-8, содержащая два пластинчатых гибких элемента (22, 23), из которых один (22) шарнирно сочленен у своего поперечного внешнего конца с держателем ступицы колеса (12) посредством втулки (36) и крепится у своего поперечного внутреннего конца к упомянутому, по меньшей мере, одному нижнему рычагу (18), а другой (23) крепится у своего поперечного внешнего конца к держателю ступицы колеса (12) и шарнирно сочленен у своего поперечного внутреннего конца с упомянутым, по меньшей мере, одним нижним рычагом (18) посредством втулки (37).
| Линия для обработки изделий в ваннах | 1986 |
|
SU1361084A1 |
| Спирально-шлифовальный станок | 1985 |
|
SU1288028A1 |
| Подвеска колеса автомобиля | 1972 |
|
SU860687A3 |
| НЕЗАВИСИМАЯ РЫЧАЖНАЯ ПОДВЕСКА ТРАНСПОРТНОГО | 0 |
|
SU370084A1 |
| НЕЗАВИСИМАЯ ПОДВЕСКА УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ | 2001 |
|
RU2225796C2 |
| НЕЗАВИСИМАЯ ПОДВЕСКА УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ | 2002 |
|
RU2238192C2 |

