Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к железнодорожным составам, а конкретнее к методикам для слежения за целостностью железнодорожного состава и установления прохождения состава относительно множества виртуальных блок-участков, определенных вдоль железнодорожного пути, по которому проходит состав.
Традиционные сигнальные системы железнодорожного сообщения использовали обширный набор придорожного оборудования для управления движением поездов и поддержания безопасных разделительных расстояний между составами. В этих традиционных системах железнодорожное управление достигается посредством обнаружения присутствия состава, определения доступности пути для каждого состава, сообщения об доступности пути бригаде состава и управления движением состава в соответствии с доступностью пути.
Присутствие состава обычно обнаруживается непосредственно через чувствительные элементы (датчики) или рельсовую цепь, ассоциативно связанную с конкретным участком железных дорог, называемым блок-участком. Присутствие состава вызывает изменение сопротивления в рельсовой цепи блок-участка. Таким образом, определяется занятость каждого блок-участка. Применяется жизненно важная логика принятия решений, используя информацию о занятости блок-участка в связи с другой предоставленной информацией, например, о положениях стрелок, чтобы определить доступность свободных маршрутов для составов. Традиционные железнодорожные системы требуют установки и технического обслуживания дорогого устройства на придорожной полосе для сообщения о доступности пути приближающимся составам. Придорожное оборудование физически отображает сигналы или показания, которые интерпретируются бригадой состава, приближающегося к сигнальному устройству. Таким образом, интерпретирование показаний сигнала может являться объектом человеческой ошибки из-за замешательства, невнимания или суровых погодных условий.
Альтернативой традиционным сигнальным системам на основе рельсовой цепи являются системы управления составом на основе обмена информацией (CBTC). Эти системы управления составом обычно включают в себя компьютер в одном или более постоянных местоположениях для определения движения, полномочий и/или ограничений, применяемых к каждому конкретному составу. Компьютер затем передает эту информацию о конкретном составе в уникальных сообщениях, адресованных или направленных каждому отдельному составу.
Краткое описание чертежей
Преимущества настоящего изобретения будут более очевидны из последующего описания, принимая во внимание прилагаемые чертежи.
Фиг.1 является блок-схемой примерной системы для слежения за целостностью железнодорожного состава и определения прохождения состава относительно множества виртуальных блок-участков.
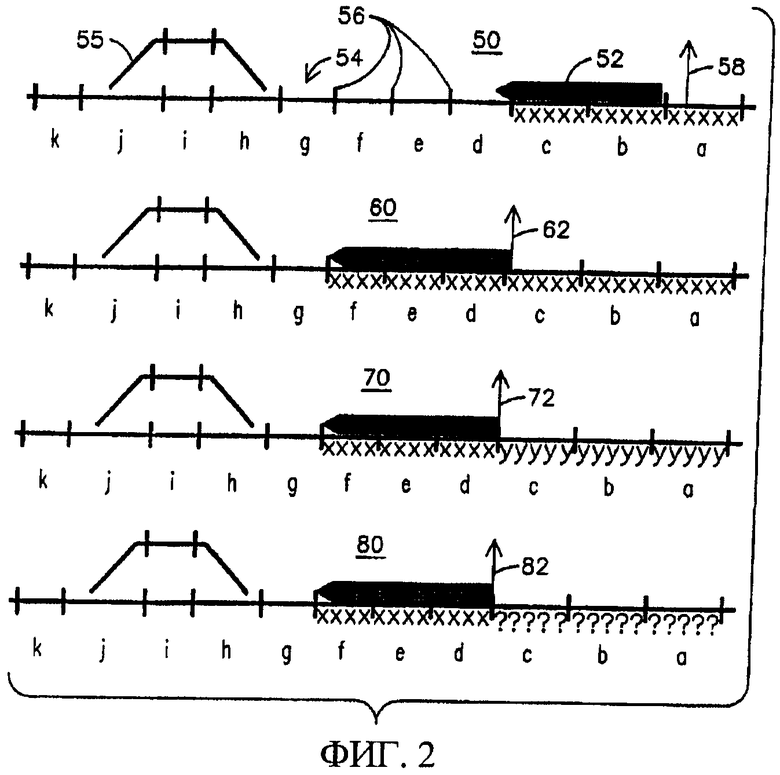
Фиг.2 показывает временную последовательность схем, представляющих примерные рабочие ситуации в связи с составом, оборудованным системой, реализующей аспекты настоящего изобретения.
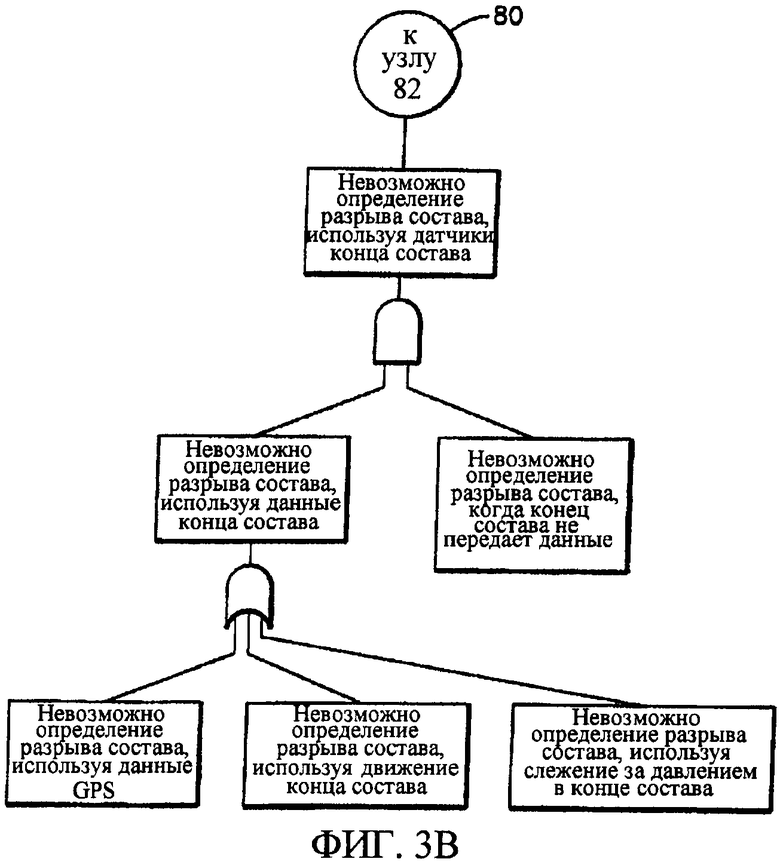
Фиг.3 составлена совместно из фиг.3А и 3В и иллюстрирует дерево неисправностей примерных состояний отказа, которые могли бы привести к ошибочному определению в отношении того, пересек ли весь состав границу одного из соответствующих виртуальных блок-участков.
Подробное описание изобретения
Перед подробным описанием примерной системы в соответствии с аспектами настоящего изобретения следует заметить, что такие аспекты находятся преимущественно в новой структурной комбинации стандартных чувствительных элементов (датчиков) и вычислительных модулей, выполненных с возможностью обработки данных от таких чувствительных элементов, и не обязательно в отдельных конкретных конфигурациях таких устройств. Соответственно, структура, управление и расположение этих стандартных устройств проиллюстрированы на чертежах с помощью легко понимаемых блок-схем, которые показывают только те конкретные детали, которые считаются имеющими отношение к настоящему изобретению, для того чтобы не отягощать раскрытие излишними деталями, которые будут легко очевидны для специалистов в данной области техники, извлекающих пользу из описания в этом документе. Таким образом, иллюстрации фигур в виде блок-схем могут не обязательно представлять собой физическую структурную компоновку примерной системы, но в первую очередь предназначены для иллюстрации основных компонентов системы в традиционном функциональном расположении, в соответствии с чем настоящее изобретение может быть легче понято.
Фиг.1 является блок-схемой примерной бортовой системы 8 для слежения за целостностью железнодорожного состава 10 и определения прохождения состава относительно множества виртуальных блок-участков, которые могут быть определены посредством беспроводных передач вдоль участка пути, по которому следует состав. Состав 10 обычно состоит из множества вагонов и одного или более локомотивов, которые при соединении друг с другом образуют единый состав. Состав обычно включает в себя пневмолинию 18, взаимосвязанную между вагонами и локомотивами, которая может использоваться для управления пневматически управляемым оборудованием, например пневмотормозами. Виртуальные блок-участки обеспечивают меры безопасности для перемещения состава относительно других составов на участке пути, когда имеет место совместное использование участка пути. При использовании в данном документе виртуальные блок-участки относятся к блок-участкам, которые могут быть получены с помощью беспроводных передач без использования рельсовых цепей.
Аспекты настоящего изобретения признают, что может существовать множество состояний отказа, которые могут влиять на определение целостности состава, например, отделились ли части состава одна от другой (разрыв состава), что могло бы привести к ошибочному определению состава, фактически пересекшего границу одного из соответствующих виртуальных блок-участков. Например, если должна была произойти блокировка в пневмолинии (например, воздуховоде), которая тянется вдоль всей длины состава, то только слежение за давлением в передней части воздуховода у местоположения головы состава (H.O.T.) может быть неспособно обнаружить состояние разрыва состава, так как блокирование расположенной выше точки разрыва предотвратило бы быстрое определение потери давления в воздуховоде.
Аналогично только слежение за движением конца состава (E.O.T.) может быть неспособно обнаружить состояние разрыва состава. Например, E.O.T. может продолжать двигаться передним ходом, даже если случился разрыв состава. Таким образом, аспекты настоящего изобретения определяют такие состояния отказа и создают множественные уровни определения посредством использования множества чувствительных элементов (датчиков), сконфигурированных для слежения за различными параметрами и формирования данных, пригодных для оценки, возникло ли по меньшей мере одно из состояний отказа. Вышеупомянутое сочетание данных имеет результатом высоконадежную систему для слежения и определения прохождения состава относительно множества виртуальных блок-участков.
В одном примерном варианте осуществления система 8 может включать в себя приемопередатчик 12 H.O.T., находящийся в связи (например, беспроводной связи) с набором 14 датчиков E.O.T. с помощью приемопередатчика 15 E.O.T. Например, набор 14 датчиков может включать в себя датчик 16 давления E.O.T., пневматически присоединенный к пневмолинии 18. Набор 14 датчиков может дополнительно включать в себя датчик 20 движения, например акселерометр, и приемник 22 глобальной системы определения местоположения.
В одном примерном варианте осуществления система 8 может включать в себя набор 30 датчиков H.O.T., таких как один или более датчиков 32 и 34 давления, которые могут быть пневматически присоединены к пневмолинии 18. Будет принято во внимание, что датчики H.O.T., которые могут уже являться частью ведущего локомотива, такие как датчики скорости и положения, или вычисления, осуществляемые бортовым контроллером, могут использоваться для оценки данных E.O.T. в комбинации с данными H.O.T.
База 40 данных (или любое подходящее цифровое запоминающее устройство) может использоваться для хранения множества правил для соотнесения данных, собранных у местоположения головы состава, с данными, собранными у местоположения конца состава. Эти правила могут быть сконфигурированы для уменьшения вероятности осуществления ошибочного определения в отношении того, пересек ли весь состав границу одного из соответствующих виртуальных блок-участков. Примером прямого правила может являться следующее. Если давление H.O.T. сохраняется и обнаружена потеря давления E.O.T., тогда это сочетание информации может указывать отсутствие целостности состава, хотя и может присутствовать состояние заблокированного воздуховода. Другим примерным правилом может быть следующее. Если величина основанной на GPS скорости E.O.T. согласуется с величиной скорости H.O.T., и движение по акселерометру указывает движение E.O.T. противоположно направлению перемещения H.O.T., то это сочетание информации может указывать отсутствие целостности состава. Например, одна отделенная часть состава могла бы двигаться противоположно другой отделенной части состава в одинаковом диапазоне скорости.
Процессор 42 сконфигурирован для обработки данных, собранных в местоположениях конца и головы состава, используя правила в базе 40 данных для определения, действительно ли весь состав пересек один из соответствующих виртуальных блок-участков. В случае если такое определение указывает пересечение соответствующего блок-участка, процессор 42 может объявить тот виртуальный блок-участок незанятым и соответственно доступным для входа в блок-участок другого состава. Наоборот, в случае если такое определение указывает отсутствие пересечения соответствующего блок-участка, то процессор 42 может объявить этот виртуальный блок-участок занятым и соответственно недоступным для входа в блок-участок другого состава. Вышеупомянутая информация о состоянии блок-участка может быть передана машинисту состава посредством пользовательского интерфейса 44.
В соответствии с другими аспектами настоящего изобретения, на основе результатов определения, выполненного процессором 42, приемопередатчик 12 (или любое подходящее бортовое устройство связи) может автоматически управляться (не требуя какого-либо действия от бортового персонала) с помощью процессора 42, чтобы передавать на внебортовое местоположение, такое как придорожное оборудование 50, и/или централизованную систему 52 управления движением, настоящее состояние виртуального блок-участка относительно того, доступен или нет такой блок-участок для другого состава, или является ли система неспособной осуществлять определение внутри допустимого доверительного интервала, и следовательно, передавать предупреждающее состояние относительно одного или более виртуальных блок-участков. Эта способность для автоматической передачи состояния виртуального блок-участка и/или для передачи предупреждающего состояния в связи с любыми такими блок-участками является особенно преимущественной, так как она позволяет избежать возможных ошибок из-за вмешательства человека, например, когда бортовой машинист должен интерпретировать и докладывать о ситуационных происшествиях. Более того, это легко уменьшает задачи для бортового персонала, которому в ином случае необходимо было бы выполнять действия для передачи информации о состоянии блок-участка на внебортовое местоположение.
Фиг.2 представляет временную последовательность схем, представляющих примерные рабочие ситуации в связи с составом, оборудованным системой, реализующей аспекты настоящего изобретения. Схема 50 показывает состав 52 на пути 54, где линии 56 представляют собой границы для множества виртуальных блок-участков, полученных с использованием методик на основе обмена данными. Участок 55 пути представляет боковой разрез, прилегающий к пути 54, который может также извлечь выгоду из нововведений, предоставляемых настоящим изобретением. Для примера таких методик на основе обмена данными делается ссылка на патент США №6,459,965, озаглавленный «Method For Advanced Communication-Based Vehicle Control» (Способ для усовершенствованного управления транспортным средством на основе обмена данными), который включен в данный документ посредством ссылки. Линия 58 представляет последнее известное хвостовое местоположение состава 52, которое подтверждено процессором 42 в сочетании с последним обновлением данных E.O.T. На схеме 50 виртуальные блок-участки a, b и c (как представлено с расположенным под ними буквенным шаблоном «ххххх») могут быть обозначены как занятые и соответственно недоступные для других составов.
На схеме 60 линия 62 представляет запрос (например, опрос) новых данных E.O.T. Отметим, что блок-участки a, b и c продолжают быть обозначенными как занятые, также как и блок-участки d, e и f, так как запрошенные данные E.O.T. не получены и не обработаны процессором 42.
На схеме 70 линия 72 представляет новое известное хвостовое местоположение состава 52, которое подтверждено с помощью нового обновления данных E.O.T. Отметим, что в этом случае виртуальные блок-участки a, b и c обозначены сейчас как свободные (как представлено посредством буквенного шаблона «yyyyy»). В случае когда система не способна удовлетворительно проверить целостность состава, тогда узлы a, b и c были бы обозначены как непроверенные (как представлено посредством шаблона со знаком вопроса) на схеме 80, и эта информация о потере целостности была бы автоматически передана в форме предупреждающего сообщения на внебортовое местоположение, например, системе 52 управления движением (фиг.1), где соответствующее действие было бы осуществлено, чтобы передать эту предупреждающую информацию другим составам и/или независимо определить состояние таких блок-участков. Предполагается, что в одном примерном варианте осуществления следующий приближающийся состав (по приему предупреждающего сообщения от системы управления движением и вынужденный замедлиться до достаточно безопасной скорости состава) может продолжать выполнять определение в отношении состояния данных виртуальных блок-участков. Например, машинист в следующем приближающемся составе может визуально подтвердить в отношении состояния таких виртуальных блоков-участков. Эта информация, в свою очередь, была бы передана обратно системе управления движением и/или была бы использована для настройки любого подходящего придорожного оборудования для показа соответствующего условия, например, являются ли или нет блок-участки свободными для безопасного прохождения состава.
Фиг.3, составленная совместно из фиг.3А и 3В, является деревом неисправностей, иллюстрирующим примерные состояния отказа, которые могли бы привести к ошибочному определению в отношении того, пересек ли весь состав границу одного из соответствующих виртуальных блок-участков. Дерево неисправностей может быть многоуровневым деревом и сконфигурировано для оценки аспектов настоящего изобретения относительно комбинированного использования данных E.O.T. вместе с данными H.O.T., чтобы соответствовать необходимому уровню безопасности. Дерево неисправностей содержит элементы, которые представляют возможные ошибки, например, заключенные в блоки, взаимосвязанные с помощью соответствующих логических соединителей, например, логических операторов OR (ИЛИ) и AND (И). Круги 80 и 82 представляют взаимосвязывающие узлы для фиг.3А и 3В.
Одним примерным способом прояснения занятости блок-участка может быть следующее.
Когда процессор 42 оценил (например, в заранее определенном интервале) местоположение E.O.T. состава относительно границы виртуального блок-участка, процессор 42 через приемопередатчик 12 H.O.T. опросит приемопередатчик 15 E.O.T. для обновления информации. Обновление информации может включать в себя следующие данные:
воздушное давление в конце состава от датчика 16 давления,
полученная из GPS скорость конца состава от приемника 22 GPS,
полученное от акселерометра 20 состояние движения состава (например, остановлен, движение вперед или обратное движение).
Процессор 42 может прояснить занятость блок-участка при условии, если удовлетворяются следующие условия:
определяется, что заранее определенный диапазон местоположения E.O.T. находится за границей блок-участка,
сообщенное воздушное давление в конце состава больше, чем заранее определенное минимальное значение для заданного типа состава,
сообщенная скорость конца состава на основе GPS является согласующейся со скоростью H.O.T., рассчитанной процессором, и
сообщенное состояние движения конца состава является согласующимся с состоянием движения H.O.T., рассчитанным процессором.
Предполагается, что кто-то может обеспечить соответствующий предел, который учитывает неточность измерения положения состава (например, наихудший случай местоположения H.O.T.) плюс общую временную задержку, ассоциированную с опросом E.O.T. и приемом ответа.
Если процессор 42 не принимает запрошенное обновление информации от E.O.T., то блок-участок останется занятым до успешного приема последующего запрошенного обновления информации.
Примерный способ наблюдения за целостностью состава может быть следующим.
При условии, что кто-то первоначально установил подходящую длину состава и целостность состава, процессор 42 отслеживает датчики 32 и 34 давления H.O.T. Процессор 42 может определить, что случилась потеря целостности состава, когда любое из двух измерений давления указывает падение воздушного давления ниже конкретного порогового значения.
Если процессор 42 не принимает запрошенные данные E.O.T. за конкретное количество последовательных попыток прояснения блок-участка, то процессор 42 объявит потерю целостности состава. Предполагается, что кто-то мог бы уменьшить рабочее влияние слабой связи E.O.T. на конкретных местоположениях пути (например, тоннель, мосты), не размещая в этих местоположениях границы виртуальных блок-участков.
В дополнение к опросу E.O.T. для информации, как часть процесса пересечения границы каждого узла, процессор 42 конфигурируется для гарантии, что приемопередатчик E.O.T. периодически опрашивается с некоторой заданной частотой.
Процессор 42 также будет отслеживать воздушное давление конечной части состава, как часть функции наблюдения за целостностью состава. Процессор 42 может определять, что была потеря целостности состава, когда величина, большая, чем заранее определенная пороговая величина (как определено для заданного типа состава) не принимается от E.O.T. в течение времени, большего, чем заданный период времени.
Процессор 42 будет отслеживать состояние движения конца состава на основе акселерометра. Процессор 42 может определять, что была потеря целостности состава, когда сообщенное состояние, которое согласуется с вычисленным процессором 12 состоянием, не принимается от E.O.T. в течение времени, большего, чем заданный период времени.
Процессор 42 будет отслеживать скорость движения конца состава на основе GPS. Процессор 42 может делать вывод, что была потеря целостности состава, когда сообщенная скорость, которая согласуется с вычисленной процессором 12 скоростью, не принимается от E.O.T. в течение времени, большего, чем заданный период времени.
Примерные вероятности, выведенные аналитически, относительно необнаруженного состояния разрыва состава.
Данные H.O.T. только по слежению = 5,7·10-6
Данные E.O.T. только по слежению = 2,1·10-8
Объединенные данные H.O.T. и E.O.T. = 1,2·10-13
Соответственно ожидается, что исчисление объединенной вероятности будет умеренно соответствовать характерным требованиям, например, требуемым уровнем сохранности целостности (SIL) 4 стандартов безопасности состава = 1·10-10.
Аспекты изобретения также могут быть реализованы в качестве машиночитаемого кода на машиночитаемом носителе. Машиночитаемым носителем является любое запоминающее устройство, которое может хранить данные, которые впоследствии могут быть считаны вычислительной системой. Примеры машиночитаемого носителя включают в себя постоянное запоминающее устройство, оперативное запоминающее устройство, компакт-диски, универсальные цифровые диски, магнитную ленту, запоминающие устройства на оптических дисках. Машиночитаемый носитель также может распределяться по соединенным сетью вычислительным системам, так что машиночитаемый код сохраняется и исполняется распределенным способом.
На основании вышеизложенного описания изобретение может быть реализовано с использованием программирования ЭВМ или инженерных методик, включающих в себя компьютерное программное обеспечение, микропрограммное обеспечение, аппаратные средства или любое сочетание или подмножество этого. Любая такая результирующая программа, обладающая средством машиночитаемого кода, может быть реализована или предоставлена на одном или более машиночитаемом носителе, таким образом создавая компьютерный программный продукт, т.е. изделие согласно изобретению. Машиночитаемым носителем может быть, например, постоянный (жесткий) диск, дискета, оптический диск, магнитная лента, полупроводниковое запоминающее устройство, например, постоянное запоминающее устройство (ROM) и т.д., или любая среда передачи/приема, такая как Интернет или другая сеть связи или линия связи. Изделие, содержащее машинный код, может быть сделано и/или использовано посредством выполнения кода непосредственно с одного носителя с помощью копирования кода с одного носителя на другой носитель или с помощью передачи кода по сети.
Устройством для изготовления, использования или продажи изобретения может являться одна или более систем обработки, включающая в себя, но не ограниченная этим, центральный процессор (CPU), память, запоминающие устройства, линии связи и устройства, серверы, устройства ввода/вывода или любые подкомпоненты одной или более систем обработки, включая программное обеспечение, микропрограммное обеспечение, аппаратные средства или любое их сочетание или подмножество, которые реализуют изобретение, как изложено в формуле изобретения.
Пользовательский ввод может быть принят от клавиатуры, мыши, пера, голоса, сенсорного экрана или любого другого средства, посредством которого человек может ввести данные в компьютер, включая (ввод) через другие программы, такие как прикладные программы.
Любой из специалистов в вычислительной технике легко сможет соединить программное обеспечение, созданное как описано, с соответствующими аппаратными средствами общего назначения или специального назначения, чтобы создать вычислительную систему или вычислительную подсистему, реализующую способ изобретения.
Несмотря на то что предпочтительные варианты осуществления настоящего изобретения показаны и описаны здесь, будет очевидно, что такие варианты осуществления предоставляются только в качестве примера. Множественные вариации, изменения или замены придут на ум специалистам в данной области техники без отклонения при этом от изобретения. Соответственно, подразумевается, что изобретение ограничено только сущностью и объемом прилагаемой формулы изобретения.
Список частей
| название | год | авторы | номер документа |
|---|---|---|---|
| Система виброакустических измерений и система контроля местоположения поезда | 2023 |
|
RU2814181C1 |
| СИСТЕМА СЛЕЖЕНИЯ ЗА ЖЕЛЕЗНОДОРОЖНЫМИ ВАГОНАМИ | 2005 |
|
RU2380261C2 |
| Система контроля местоположения поезда | 2018 |
|
RU2675041C1 |
| Система контроля местоположения поезда | 2017 |
|
RU2659913C1 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛОКОМОТИВОВ ПРИ МАНЕВРОВОЙ РАБОТЕ | 2014 |
|
RU2567099C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2016 |
|
RU2618660C1 |
| СИСТЕМА И СПОСОБ ОБРАБОТКИ, СОХРАНЕНИЯ И ПЕРЕДАЧИ ДАННЫХ ОТ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ПОДВИЖНОГО ОБЪЕКТА | 2021 |
|
RU2839362C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2015 |
|
RU2583988C1 |

Изобретение относится к методикам для слежения за целостностью железнодорожного состава и установления прохождения состава относительно множества виртуальных блок-участков, определенных вдоль железнодорожного пути. В способе определяют множество состояний отказа, которые могут привести к ошибочному определению, что весь состав пересек границу одного из соответствующих виртуальных блок-участков, затем собирают данные у местоположения у головы состава и конца состава. Затем сохраняют множество правил для сопоставления данных, собранных у местоположения головы состава, с данными, собранными у местоположения конца состава, и обрабатывают данные, чтобы определить, пересек ли состав один из соответствующих блок-участков. В случае когда определение указывает прохождение соответствующего блок-участка, объявляют блок-участок незанятым и доступным для вхождения в блок-участок другого состава, а в случае когда определение указывает отсутствие прохождения соответствующего блок-участка, объявляют блок-участок занятым и недоступным для вхождения в блок-участок другого состава. Достигается повышение надежности системы для слежения и определения прохождения состава относительно множества виртуальных блок-участков. 2 н. и 8 з.п. ф-лы, 6 ил.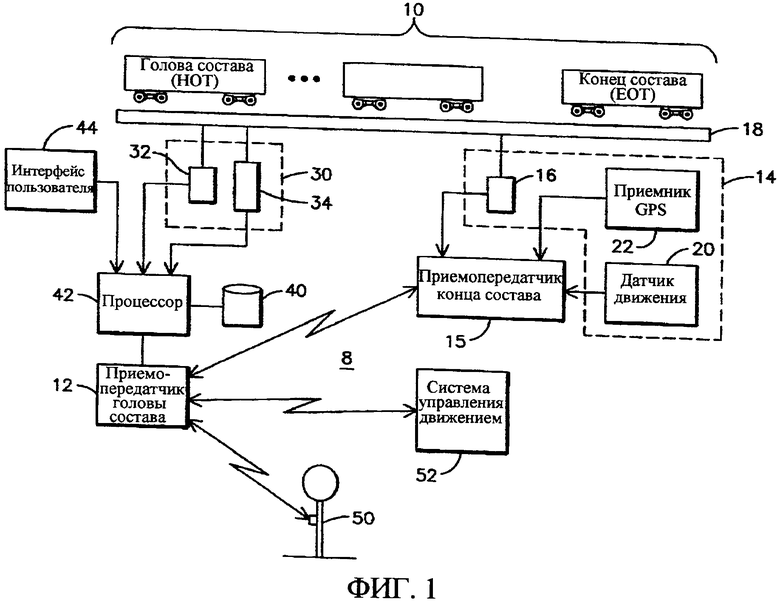
1. Способ слежения за целостностью железнодорожного состава (10) и определения прохождения состава относительно множества виртуальных блок-участков, определенных посредством беспроводных передач вдоль участка (54) пути, по которому перемещается состав, с помощью упомянутых виртуальных блок-участков, обеспечивающих меры безопасности для перемещения состава относительно других составов на участке пути, когда имеется совместное использование участка пути, при этом упомянутый способ содержит этапы, на которых:
определяют множество состояний отказа, которые могут привести к ошибочному определению, что весь состав пересек границу одного из соответствующих упомянутых виртуальных блок-участков;
собирают данные у местоположения конца состава, упомянутые данные являются собираемыми от множества датчиков (14), где каждый из упомянутых датчиков следит за различными параметрами и формирует данные, пригодные для оценки того, возникло ли по меньшей мере одно из упомянутых состояний отказа;
собирают данные у местоположения головы состава с соответствием данных, собранных у головы состава, типу данных, собранных у местоположения конца состава;
сохраняют (40) множество правил для сопоставления данных, собранных у местоположения головы состава, с данными, собранными у местоположения конца состава, для уменьшения вероятности допущения ошибочного определения в отношении того, пересек ли весь состав границу одного из соответствующих упомянутых виртуальных блок-участков;
обрабатывают (42) данные, собранные у упомянутого местоположения конца состава и у упомянутого местоположения головы состава, используя сохраненные правила, чтобы определить, пересек ли весь состав один из соответствующих упомянутых виртуальных блок-участков;
в случае, когда упомянутое определение указывает прохождение упомянутого соответствующего блок-участка, объявляют упомянутый виртуальный блок-участок незанятым и соответственно доступным для вхождения в блок-участок другого состава; и
в случае, когда упомянутое определение указывает отсутствие прохождения упомянутого соответствующего блок-участка, объявляют упомянутый виртуальный блок-участок занятым и соответственно недоступным для вхождения в блок-участок другого состава.
2. Способ по п.1, в котором в случае, когда результатом упомянутого определения является невозможность определить прохождение упомянутого соответствующего блок-участка, ассоциируют предупреждающее состояние с упомянутым виртуальным блок-участком; и автоматически передают внебортовой системе предупреждающее состояние, ассоциируемое с упомянутым виртуальным блок-участком, где упомянутая внебортовая система является ответственной за управление совместным использованием пути другими составами.
3. Способ по п.1, в котором этап сбора данных у местоположения конца состава содержит этап, на котором собирают данные от датчиков давления, пневматически присоединенных к пневмолинии, которая простирается вдоль всего состава.
4. Способ по п.1, в котором этап сбора данных у местоположения конца состава содержит этап, на котором собирают данные о движении от датчика движения, основанного на инерции.
5. Способ по п.1, в котором этап сбора данных у местоположения конца состава содержит этап, на котором собирают данные от приемника глобальной системы определения местоположения (GPS).
6. Способ по п.1, в котором этап обработки данных, собранных у местоположения конца состава и у местоположения головы состава, содержит этап, на котором получают новые данные конца состава, сопоставляют упомянутые новые данные конца состава с соответствующими новыми данными головы состава, чтобы гарантировать целостность состава; и определяют новое обновление для последнего положения конца состава относительно границы для одного из соответствующих упомянутых виртуальных блок-участков.
7. Способ слежения за целостностью железнодорожного состава (10) и определения прохождения состава относительно множества виртуальных блок-участков, определенных с помощью беспроводных передач вдоль участка (54) пути, по которому перемещается состав, с помощью упомянутых виртуальных блок-участков, обеспечивающих меры безопасности для перемещения состава относительно других составов на участке пути, когда имеется совместное использование участка пути, при этом упомянутый способ содержит этапы, на которых:
собирают данные, пригодные для оценки условий, которые могут влиять на целостность состава, по меньшей мере, от одного датчика (14) у местоположения конца состава;
собирают данные у местоположения головы состава с соответствием данных, собранных у головы состава, типу данных, собранных у местоположения конца состава;
обрабатывают (42) данные, собранные у упомянутого местоположения конца состава и у упомянутого местоположения головы состава, чтобы определить, пересек ли весь состав один из соответствующих упомянутых виртуальных блок-участков;
в случае, когда упомянутое определение неспособно убедить в прохождении соответствующего упомянутого блок-участка, ассоциируют предупреждающее состояние с упомянутым виртуальным блок-участком; и автоматически передают внебортовой системе предупреждающее состояние упомянутого виртуального блок-участка, где упомянутая внебортовая система является ответственной за управление совместным использованием пути другими составами.
8. Способ по п.7, в котором этап обработки данных, собранных у упомянутого местоположения конца состава и у упомянутого местоположения головы состава, содержит этап, на котором получают новые данные конца состава, сопоставляют упомянутые новые данные конца состава с соответствующими новыми данными головы состава, чтобы гарантировать целостность состава; и определяют новое обновление для настоящего положения конца состава относительно границы для одного из соответствующих упомянутых виртуальных блок-участков.
9. Способ по п.7, дополнительно содержащий этап, на котором сбрасывают предупреждающее состояние, ассоциированное с виртуальным блок-участком, в состояние занятости или в состояние незанятости на основе результатов наблюдений участка пути, соответствующего виртуальному блок-участку.
10. Способ по п.9, в котором упомянутый результат наблюдения собирается от другого состава, приближающегося к упомянутому виртуальному блок-участку, и передается внебортовой системе.
| US 2002062181 A1, 23.05.2002 | |||
| US 2003058119 A1, 27.03.2003 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СВОБОДНОСТИ ОТ ПОЕЗДА УЧАСТКА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2104894C1 |
| RU 2004132202 A, 10.06.2005. | |||

