Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов.
Известны активные гидролокаторы (об этом говорится в книгах: Из истории отечественной гидроакустики, СПб, 1998 г., с.177; 50 лет ЦНИИ "Морфизприбор", СПб, 1999, с.134, 139), работающие в режиме измерения дистанции до цели, в которых излучение и прием сигналов производится в направлении, поступающем от системы шумопеленгования.
Известны также активные гидролокаторы, в которых прием эхосигнала производится с помощью быстросканирующей характеристики направленности в заданном секторе обзора (Справочник по гидроакустике. А.П.Евтютов, А.Е.Колесников, Е.А.Корепин и др. 2-е изд. - Л.: Судостроение, 1988, с.22, 23).
Ближайшим аналогом по технической сущности является активный гидролокатор, содержащий акустические излучающую и приемную антенны, устройство формирования зондирующего сигнала, генераторное устройство, блок синхронизации, устройство формирования веера характеристик направленности, устройство согласованной фильтрации, устройство нормирования (АРУ) по помехе и устройство обнаружения эхосигнала в каждом из каналов, соответствующих отдельным характеристикам направленности веера, а также блок определения угла прихода эхосигнала (Гидроакустические средства связи и наблюдения. - Л.: Судостроение, 1982, с.29, 33-38, 138-142; Справочник по гидроакустике. А.П.Евтютов, А.Е.Колесников, Е.А.Корепин и др. 2-е изд. - Л.: Судостроение, 1988. с.19, 20).
Недостатком указанного активного гидролокатора является ухудшение точности определения угла прихода эхосигнала в многолучевом канале за счет интерференции сигналов, распространяющихся по различным лучам.
Задачей изобретения является снижение влияния интерференции на точность определения угла прихода эхосигнала. При решении этой задачи достигается технический результат, заключающийся в повышении точности определения угла прихода эхосигнала путем обеспечения возможности разделения эхосигнала по нескольким лучам, измерения значений углов прихода эхосигнала по отдельным лучам, а также обеспечения возможности работы устройства измерения угла прихода эхосигнала по лучам при различных уровнях помехи в каналах, соответствующих разным характеристикам направленности веера.
Для достижения указанного технического результата в активный гидролокатор, содержащий последовательно соединенные устройство синхронизации, устройство формирования зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, последовательно соединенные приемную акустическую антенну и устройство формирования веера из М характеристик направленности, также содержащий М последовательно соединенных устройств согласованной фильтрации, устройств нормирования по помехе и устройств обнаружения эхосигнала, также содержащий блок определения угла прихода эхосигнала, при этом второй выход устройства формирования зондирующего сигнала соединен с первыми входами М устройства согласованной фильтрации, выходы устройства формирования веера характеристик направленности соединены со вторыми входами М устройств согласованной фильтрации, введены новые признаки, а именно: М устройств выделения откликов по лучам, М устройств измерения уровней откликов по лучам, М устройств измерения времен прихода откликов по лучам, последовательно соединенные блок сравнения времен прихода и уровней откликов по лучам и блок измерения углов прихода эхосигнала по лучам, связи этих новых блоков между собой и с известными блоками активного гидролокатора.
Следует сказать, что при определении угла прихода эхосигнала в горизонтальной плоскости блок определения угла прихода эхосигнала может быть выполнен в виде осредняющего устройства. При определении угла прихода эхосигнала в вертикальной плоскости блок определения угла прихода эхосигнала может быть выполнен в виде устройства отбора измеренного угла прихода для максимального по уровню луча.
Введение новых признаков позволяет выполнить разделение откликов эхосигнала на выходе согласованного фильтра по нескольким лучам в каждом канале из веера характеристик направленности, обеспечивает повышение точности измерения углов прихода эхосигнала по этим лучам за счет уменьшения влияния интерференции, а также снижение влияния различия уровней помех в разных лепестках веера характеристик направленности на точность измерения углов прихода эхосигнала по отдельным лучам за счет учета этого различия в устройстве измерения уровней откликов по лучам.
Сущность изобретения поясняется на чертеже, где приведена блок-схема предложенного активного гидролокатора.
Активный гидролокатор содержит излучающую 1 и приемную 2 акустические антенны, генераторное устройство 3, устройство 4 формирования зондирующего сигнала, устройство 5 синхронизации, устройство 6 формирования веера характеристик направленности, устройства 71, 72…7M согласованной фильтрации, устройства 81, 82…8M нормирования по помехе, устройства 91, 92…9M обнаружения эхосигнала, устройства 101, 102…10M выделения откликов по лучам, устройства 111, 112…11M измерения уровней откликов по лучам, устройства 121, 122…12M измерения времен прихода откликов по лучам, блок 13 сравнения времен прихода и уровней откликов по лучам, блок 14 измерения углов прихода эхосигнала по лучам и блок 15 определения угла прихода эхосигнала.
Практическое исполнение блоков, входящих в изобретение, известно из практики гидроакустики. Устройства 101, 102…10M выделения откликов по лучам могут быть реализованы с применением обнаружителей импульсов с неизвестным временным положением, см., например, Проектирование импульсных и цифровых устройств радиотехнических систем / Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др. /Под ред. Ю.М.Казаринова. - М.: Высш. школа, 1985. - С.136-142. Устройства 111, 112…11M и 121, 122…12M, а также блоки 13 и 14 выполняются, например, с использованием микропроцессорной элементной базы, см. Проектирование импульсных и цифровых устройств радиотехнических систем. / Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др. Под ред. Ю.М.Казаринова. - М.: Высш. школа., 1985. - С.124-129, 272-292.
Работа устройства осуществляется следующим образом. Устройство 4 формирования зондирующего сигнала вырабатывает зондирующие сигналы с внутриимпульсной модуляцией, или сложные сигналы, т.е. сигналы с высокой разрешающей способностью по времени, что дает возможность выделить эхосигналы по отдельным лучам. Устройство 4 выдает также опорный сигнал в устройства 71, 72…7M согласованной фильтрации. Гидролокатор производит излучение зондирующего сигнала с помощью генераторного устройства 3 и излучающей акустической антенны 1. Отраженный от цели эхосигнал с выхода приемной акустической антенны 2 поступает на устройство 6 формирования веера характеристик направленности в горизонтальной (или вертикальной) плоскости.
С выхода устройства 6 принятый сигнал поступает на устройства 71, 72…7M, соответствующие каждому каналу из веера характеристик направленности, обеспечивающие сжатие отраженного эхосигнала во времени, т.е. реализацию высокой разрешающей способности гидролокатора по времени. Далее принятые сигналы поступают в соответствующие устройства 81, 82…8M, где производится процедура нормирования по помехе входных процессов U1(t), U2(t)…UM(t) в каждом канале обработки, т.е.
 ,
,  ,
,
где u1(t), u2(t)…uM(t) - сигнальные процессы на входе соответствующих устройств 81, 82…8M;
 - корень квадратный из дисперсии помехи в соответствующих каналах обработки;
- корень квадратный из дисперсии помехи в соответствующих каналах обработки;
 - сигнальные процессы на выходе соответствующих устройств 81, 82…8M, т.е. после процедуры нормирования по помехе.
- сигнальные процессы на выходе соответствующих устройств 81, 82…8M, т.е. после процедуры нормирования по помехе.
Сигнальные процессы  поступают в соответствующие устройства 91, 92…9M, где производится обнаружение эхосигнала от цели в каналах, соответствующих различным характеристикам направленности веера. При обнаружении эхосигнала от цели в устройствах 101, 102…10M производится выделение из многолучевого отраженного эхосигнала отдельных сигнальных откликов, пришедших по различным траекториям распространения сигнала в морской среде. Далее в устройствах 111, 112…11M производится измерение уровней
поступают в соответствующие устройства 91, 92…9M, где производится обнаружение эхосигнала от цели в каналах, соответствующих различным характеристикам направленности веера. При обнаружении эхосигнала от цели в устройствах 101, 102…10M производится выделение из многолучевого отраженного эхосигнала отдельных сигнальных откликов, пришедших по различным траекториям распространения сигнала в морской среде. Далее в устройствах 111, 112…11M производится измерение уровней  (
( - набор измеренных уровней откликов по разным лучам в 1-ом канале обработки,
- набор измеренных уровней откликов по разным лучам в 1-ом канале обработки,  - набор измеренных уровней откликов по разным лучам в 2-ом канале обработки, …
- набор измеренных уровней откликов по разным лучам в 2-ом канале обработки, …  - набор измеренных уровней откликов по разным лучам в М-ом канале обработки) и корректировка измеренных уровней по каждому выделенному отклику, т.е. получение величин Uизм,корр. Корректировка уровней откликов по отдельным лучам производится для каждого канала обработки с помощью коэффициентов, выработанных в соответствующих устройствах 81, 82…8M, а именно:
- набор измеренных уровней откликов по разным лучам в М-ом канале обработки) и корректировка измеренных уровней по каждому выделенному отклику, т.е. получение величин Uизм,корр. Корректировка уровней откликов по отдельным лучам производится для каждого канала обработки с помощью коэффициентов, выработанных в соответствующих устройствах 81, 82…8M, а именно:
 ,
, 
Таким образом, обеспечивается снижение влияния нормирования по помехе в разных каналах веера характеристик направленности на измерение уровней откликов по лучам в этих каналах и, тем самым, на точность измерения углов прихода эхосигнала по лучам.
В устройствах 121, 122…12M производится измерение для соответствующих откликов времен прихода откликов по лучам относительно момента излучения зондирующего сигнала. Устройство синхронизации 5 управляет во времени излучением зондирующего сигнала и устройствами 121, 122…12M, что позволяет измерять времена прихода откликов по лучам относительно момента излучения зондирующего сигнала.
Из устройств 111, 112…11M и 121, 122…12M в блок 13 поступают измеренные величины времен прихода откликов и соответствующие им измеренные величины корректированных уровней откликов для всех откликов, обнаруженных в каждом из каналов веера характеристик направленности.
В блоке 13 производится, с использованием измеренных времен прихода откликов по лучам, определение пар откликов с близкими временами прихода для каналов, соответствующих смежным по углу характеристикам направленности. Один отклик из этой пары соответствует лучу, принятому по одной из характеристик направленности, другой отклик соответствует тому же лучу, принятому по смежной характеристике направленности. Величины уровней откликов для всех найденных в блоке 13 пар откликов поступают в блок 14. Эти пары откликов соответствуют различным лучам многолучевого эхосигнала.
В блоке 14 производится измерение углов прихода эхосигнала по отдельным лучам, т.е. для каждой пары уровней откликов. Эти измерения могут выполняться по амплитудному методу моноимпульсного пеленгования (Д.Р.Родс. Введение в моноимпульсную радиолокацию. М., 1960), например, из уравнения, составленного для каждой пары откликов
 ,
,
где UI и UII - измеренные уровни Uизм,корр пары откликов по отдельным лучам на выходе двух смежных характеристик направленности, причем UI - первый отклик из пары, UII - второй отклик из пары;
RI(α), RII(α) - характеристики направленности в горизонтальной (вертикальной) плоскости в функции угла для двух смежных каналов;
α - искомый угол прихода эхосигнала по данному лучу, т.е. для данной пары откликов в двух смежных каналах характеристики направленности.
Измеренные в блоке 14 для всех пар откликов соответствующие величины углов прихода эхосигнала поступают в блок 15. В блоке 15 производится определение угла прихода эхосигнала с использованием измеренных углов прихода по отдельным лучам. По п.2 формулы изобретения при определении угла прихода эхосигнала в горизонтальной плоскости блок 15 может быть выполнен в виде осредняющего устройства, производящего нахождение среднего значения угла прихода из набора измеренных углов прихода по отдельным лучам, соответствующих сдвинутым во времени откликам. По п.3 формулы изобретения при определении угла прихода эхосигнала в вертикальной плоскости блок 15 может быть выполнен в виде устройства отбора угла прихода для максимального по уровню луча; определенная таким образом величина угла прихода эхосигнала в вертикальной плоскости используется для системы классификации обнаруженной цели.
Итак, повышение точности измерения угла прихода эхосигнала достигается путем обеспечения возможности разделения эхосигнала по отдельным лучам за счет реализации высокой разрешающей способности зондирующего сигнала по времени, измерения уровней и времени прихода по лучам и далее измерения углов прихода эхосигнала по лучам, а также уменьшения влияния различия помех в разных лепестках веера характеристик направленности на точность измерения углов прихода эхосигнала по отдельным лучам за счет учета этого различия в устройстве измерения уровней откликов по лучам.
Таким образом, поставленная задача успешно решается.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения локального объекта на фоне распределенной помехи | 2019 |
|
RU2736097C1 |
| СПОСОБ ОБРАБОТКИ ЭХОСИГНАЛА ГИДРОЛОКАТОРА | 2013 |
|
RU2528556C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ НИЖНЕЙ ТОЧКИ АЙСБЕРГА | 2015 |
|
RU2603831C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| СПОСОБ КЛАССИФИКАЦИИ ОБЪЕКТА, ОБНАРУЖЕННОГО ГИДРОЛОКАТОРОМ | 2012 |
|
RU2490664C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2021 |
|
RU2772110C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ГИДРОЛОКАТОРОМ КУРСОВОГО УГЛА ОБНАРУЖЕННОГО ОБЪЕКТА | 2015 |
|
RU2610520C1 |
| Способ измерения глубины погружения объекта | 2022 |
|
RU2789811C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2011 |
|
RU2461020C1 |
| Способ измерения скорости движения цели гидролокатором | 2017 |
|
RU2658528C1 |
Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов. Техническим результатом изобретения является повышение точности определения угла прихода эхосигнала путем обеспечения возможности разделения эхосигнала по нескольким лучам, измерения значений углов прихода эхосигнала по отдельным лучам, а также обеспечения возможности работы устройства измерения угла прихода эхосигнала по лучам при различных уровнях помехи в каналах обработки, соответствующих разным характеристикам направленности веера. 2 з.п. ф-лы, 1 ил.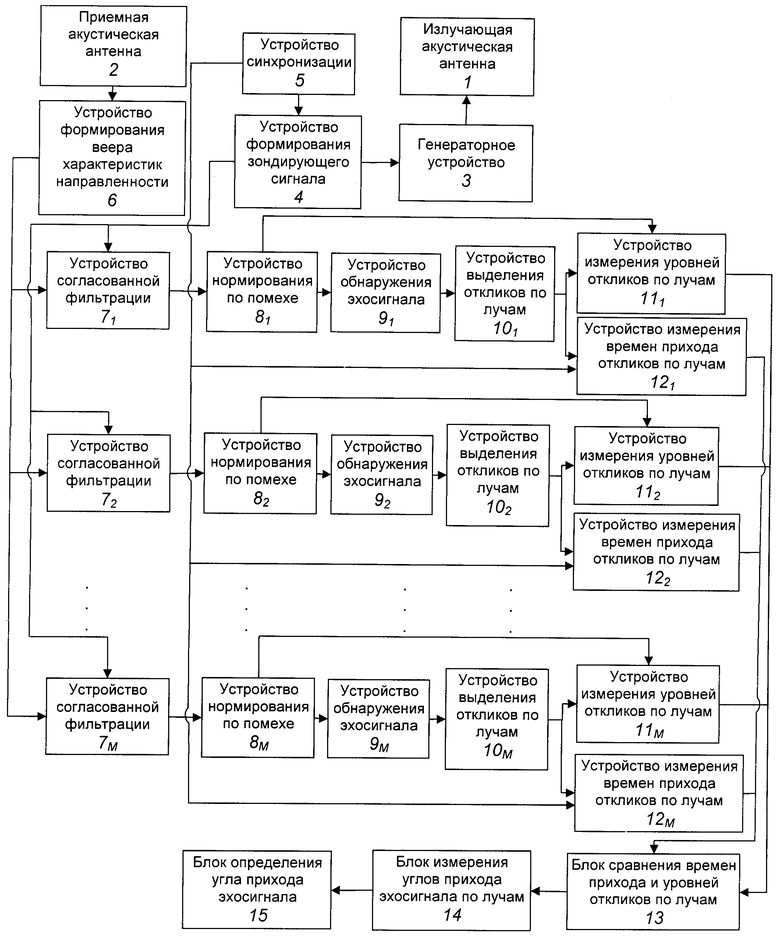
1. Активный гидролокатор, содержащий последовательно соединенные устройство синхронизации, устройство формирования зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, последовательно соединенные приемную акустическую антенну и устройство формирования веера из М характеристик направленности, также содержащий М последовательно соединенных устройств согласованной фильтрации, устройств нормирования по помехе и устройств обнаружения эхосигнала, также содержащий блок определения угла прихода эхосигнала, при этом второй выход устройства формирования зондирующего сигнала соединен с первыми входами М устройств согласованной фильтрации, выходы устройства формирования веера характеристик направленности соединены со вторыми входами М устройств согласованной фильтрации, отличающийся тем, что в него введены М устройств выделения откликов по лучам, М устройств измерения уровней откликов по лучам, М устройств измерения времен прихода откликов по лучам, последовательно соединенные блок сравнения времен прихода и уровней откликов по лучам и блок измерения углов прихода эхосигнала по лучам, при этом вторые выходы М устройств нормирования по помехе соединены с первыми входами М устройств измерения уровней откликов по лучам, выходы М устройств обнаружения эхосигнала соединены со входами М устройств выделения откликов по лучам, а их выходы соединены с соответствующими вторыми входами М устройств измерения уровней откликов по лучам и первыми входами М устройств измерения времен прихода откликов по лучам, второй выход устройства синхронизации соединен со вторыми входами М устройств измерения времен прихода откликов по лучам, выходы М устройств измерения уровней откликов по лучам соединены с первым входом блока сравнения времен прихода и уровней откликов по лучам, выходы М устройств измерения времен прихода откликов по лучам соединены со вторым входом блока сравнения времен прихода и уровней откликов по лучам, выход блока измерения углов прихода эхосигнала по лучам соединен со входом блока определения угла прихода эхосигнала.
2. Активный гидролокатор по п.1, отличающийся тем, что блок определения угла прихода эхосигнала выполнен в виде осредняющего устройства.
3. Активный гидролокатор по п.1, отличающийся тем, что блок определения угла прихода эхосигнала выполнен в виде устройства отбора измеренного угла прихода для максимального по уровню луча.
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2007 |
|
RU2346295C1 |
| Устройство для транспортирования и складирования сыпучих материалов, выгружаемых из вагонов | 1947 |
|
SU75061A1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| JP 2001272459 A, 05.10.2001 | |||
| JP 3087681 A, 12.04.1991. | |||

