Изобретение относится к области гидроакустики и может быть использовано для построения систем обнаружения локальных объектов в условиях распределенных помех различного происхождения.
Под локальным объектом здесь понимается подводный или надводный объект искусственного происхождения ограниченного размера (корабль, подводный аппарат, буй, контейнер и т.п.), при этом объем объекта существенно меньше объема лоцируемого пространства, ограниченного телесным углом характеристики направленности приемо-излучающей антенны гидролокатора и отрезком дистанции, определяемым временем излучения зондирующего сигнала (ЗС).
Под распределенными помехами подразумеваются помехи, обусловленные реверберационными отражениями излучаемых сигналов от дна или поверхности моря, а также от звукорассеивающих слоев водной массы. Это могут быть также отражения от протяженных объектов типа подводная скала (гряда камнеобразований) или береговой клин.
Корреляционные характеристики реверберации или протяженного объекта как по пространству, так и по времени, в силу природы случайно распределенных в пространстве источников переотражений, имеют малую степень связи.
В зависимости от ракурса объекта по отношению к направлению излучения реальные объекты, как правило, имеют многобликовую структуру отраженного сигнала [А.А. Илларионов, С.В. Козловский, В.П. Чернов. Экспериментальная оценка бистатической силы цели при различных видах зондирующих сигналов // Известия ЮФУ. Технические науки. Тематич. вып. «Экология 2013 - море и человек», Технологический институт Южного Федерального Университета г. Таганрог, вып. 9(146), 2013. - С. 160-165]. При этом бликовая структура эхосигнала достаточно устойчива в некоторых пределах изменения ракурса и промежутка времени между эхосигналами от объекта.
Различие между корреляционными характеристиками эхосигналов от локального объекта и распределенных помех используются в известных способах обнаружения [Патент РФ №2460088 С1 от 08.04.2011 г., МПК G01S 13/04, 15/04, опубл. 27.08.2012, БИ №24], [Патент РФ №2634787 С1 от 28.10.2016 г., МПК G01S 15/00, опубл. 03.11.2017, БИ №31].
Способ по патенту РФ №2460088 предусматривает использование классических методов приема и пороговой обработки эхосигналов гидролокаторов, использующих сформированный веер характеристик направленности, при этом корреляционная обработка временных реализаций соседних пространственных каналов позволяет идентифицировать обнаруженные сигналы как отражения от локальных или нелокальных объектов, по числу соседних приемных каналов, между которыми коэффициенты корреляции превышают значение 0,5.
Способ обнаружения локального объекта на фоне распределенной помехи по патенту РФ №2634787 основан на излучении гидролокатором двух последовательных во времени посылок одинаковых зондирующих сигналов и корреляционной обработке эхосигналов, принятых с помощью одной характеристики направленности приемной антенны гидролокатора.
Особенностью указанных способов является то, что первоначально производится определение превышения эхосигналом уровня заданного порога, а затем определяют коэффициент корреляции между временными наборами соседних приемных каналов или в двух последовательных во времени реализациях эхосигналов, в которых произошло превышение порога обнаружения.
Это может приводить к тому, что при отношениях сигнал/помеха близких к порогу, повышается вероятность пропуска эхосигналов, корреляционная связь которых позволила бы принять решение о наличии объекта обнаружения.
Таким образом, недостатком способов по патентам РФ №2460088 и №2634787 является недостаточная помехоустойчивость в условиях интенсивных реверберационных помех и низком уровне эхосигнала при многобликовой структуре объекта.
Известен способ обнаружения локального объекта на фоне распределенной помехи [Патент РФ №2736097 от 11.11.2020 г., МПК G01S 15/00] для гидролокаторов.
По количеству общих признаков этот способ является наиболее близким аналогом предлагаемого способа
В этом способе, использующем сформированный веер характеристик направленности, предварительно в каждой временной реализации каждого приемного канала определяют модуль взаимно-ковариационной функции принятого и излученного сигналов путем обратного преобразования Фурье свертки спектра эхосигнала с комплексно-сопряженным спектром излученного сигнала, а корреляционную связь огибающих временных реализаций соседних приемных каналов, определяют путем нахождения максимума модуля взаимно-ковариационной функции между огибающими отражений лоцируемых объемов пространства в соседних приемных каналах, определяют среднее значение по всем максимумам, нормируют все максимумы взаимно-ковариационных функций на среднее значение и решение о наличии локального объекта принимают в случае превышения нормированных максимумов взаимно-ковариационных функций уровня выбранного порога.
Таким образом, в указанном способе достигается повышение помехоустойчивости за счет использования корреляции между огибающими отражений лоцируемого объема пространства в соседних приемных каналах до пороговой обработки.
Недостатком данного способа - прототипа является необходимость формирования статического веера характеристик направленности, что приводит к усложнению аппаратуры, а для некоторых типов антенн гидролокаторов не представляется возможным. Это касается антенн малых волновых размеров либо сплошных антенн, в которых невозможно вводить фазовые задержки между участками антенны.
Задачей изобретения является обеспечение эффективной работы гидролокатора на фоне распределенной помехи при невозможности формирования статического веера характеристик направленности.
Технический результат предлагаемого технического решения заключается в повышении помехоустойчивости обнаружения локальных объектов на фоне распределенной помехи с использованием приемной антенны гидролокаторами, которые имеют одноканальный приемный тракт.
Указанный технический результат достигается тем, что в способе обнаружения локального объекта на фоне распределенной помехи, содержащий излучение сложного зондирующего сигнала, прием эхосигнала, набор временных реализаций для обработки последовательно в одном приемном канале, вычисление спектра принятого сигнала, определение модулей взаимно-ковариационной функции принятого и излученного сигналов путем обратного преобразования Фурье свертки спектра эхосигнала с комплексно-сопряженным спектром излученного сигнала, определение корреляционной связи между реализациями, введены новые признаки, заключающиеся в том, что сложный сигнал формируют как последовательную пачку из N одинаковых сложных элементарных импульсов, определяют спектр огибающей модуля взаимно-ковариационной функции в каждой временной реализации, соответствующей длительности элементарного импульса, сохраняют текущий спектр и спектры огибающих предыдущих (N-1) временных реализаций, производят попарное перемножение спектров в текущей q-й реализации с комплексно-сопряженным спектром (q-1)-й предыдущей реализации для (N-1) пар спектров соседних реализаций, суммируют (N-1) произведений спектров соседних реализаций, корреляционную связь между реализациями определяют путем вычисления обратного преобразования Фурье полученной суммы и определения максимального значения модуля взаимно-ковариационной функции, определяют среднее значение модулей взаимно-ковариационных функций по выбранному набору временных реализаций, нормируют все максимумы модулей взаимно-ковариационных функций на среднее значение, а решение о наличии локального объекта в выбранном наборе временных реализаций принимают в случае превышения нормированного максимума взаимно-ковариационной функции уровня заданного порога.
Таким образом, в предлагаемом способе достигается повышение помехоустойчивости одноканального приемного тракта гидролокатора за счет использования корреляции между огибающими отражений многобликового объекта в соседних временных реализациях при формировании сложного сигнала как последовательной пачки из одинаковых сложных элементарных импульсов.
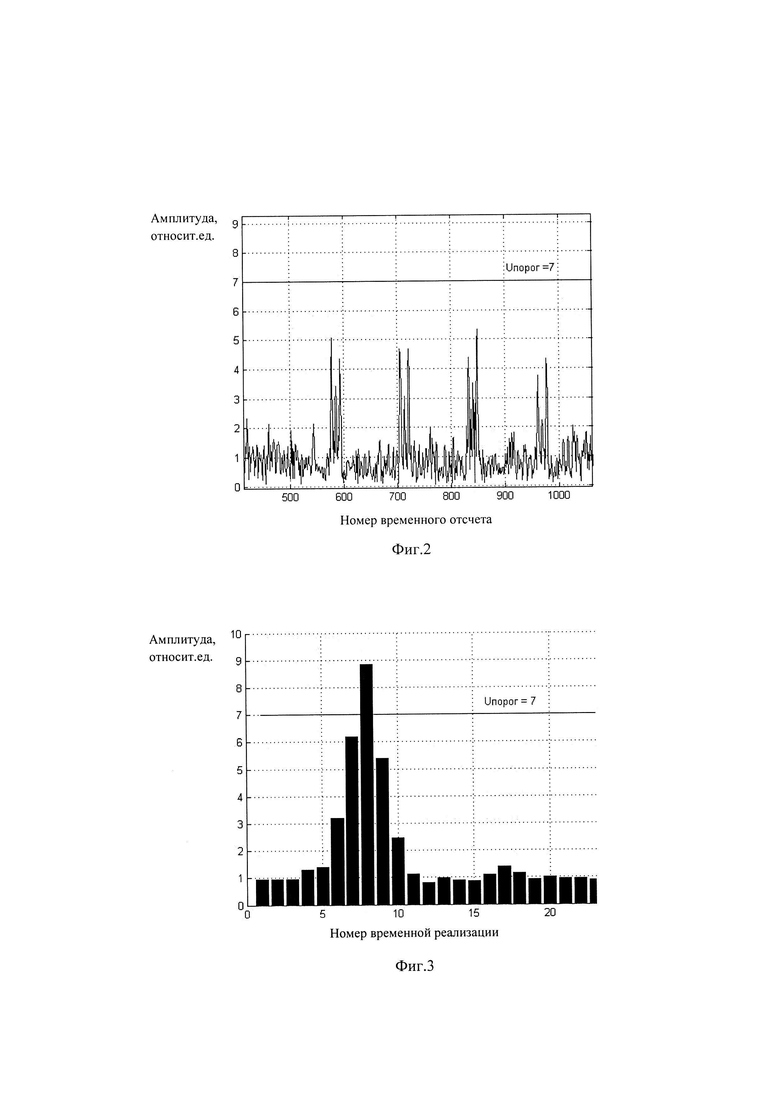
Сущность изобретения поясняется фиг 1-3, где на фиг. 1 приведена блок-схема устройства, реализующего предлагаемый способ обнаружения для ЗС, состоящего из 4-х элементарных импульсов, на фиг. 2 приведен результат моделирования когерентной обработки эхосигнала трехбликового объекта для ЗС, состоящего из 4-х элементарных импульсов, на фиг. 3 - результат моделирования обработки того же эхосигнала по предлагаемому способу на входе блока принятия решения.
Устройство (фиг. 1) содержит приемо-излучающую антенну 1, коммутатор приема-передачи 2, задающий генератор 3, приемное устройство 4, блок 5 когерентной обработки сложных сигналов, блок 6 БПФ, фильтр 7, первое буферное запоминающее устройство (БЗУ) 8 комплексных спектров огибающих, блоки 9 комплексного сопряжения спектров, блоки 10 перемножения, сумматор 11, блок 12 обратного быстрого преобразования Фурье (ОБПФ), блок 13 выбора максимального модуля взаимно-ковариационной функции (ВКФ), второе БЗУ 14, блок 15 вычисления среднего значения, блок 16 нормирования, блок 17 принятия решения об обнаружении, блок 18 установки порога обнаружения.
Вход антенны 1 соединен через коммутатор приема-передачи 2 с выходом задающего генератора 3. Второй выход коммутатора приема-передачи 2 соединен с входом приемного устройства 4, выход которого соединен с входом блока 5 когерентной обработки сложных сигналов. Выход блока 5 когерентной обработки сложных сигналов через последовательно соединенные блок 6 БПФ блок 7 фильтра подключен к входу блока 8 первого БЗУ, выходы 2…N блока 8 первого БЗУ через блоки 9 комплексного сопряжения подключены к первым входам блоков 10 перемножения, а выходы 1…(N-1) блока 8 подключены к вторым входам блоков 10 перемножения, выходы которых соединены с входами сумматора 11, выход которого через последовательно соединенные блок 12 ОБПФ, блок 13 выбора максимума модуля ВКФ и блока 14 второго БЗУ подключен на первый вход блока 16 нормирования, на второй вход которого подключен выход блока 15 вычисления среднего значения, вход которого подключен к второму выходу блока 14 второго БЗУ. Выход блока 16 подключен к первому входу блока 17 принятия решения об обнаружении, второй вход которого подключен к выходу блока 18 установки порога обнаружения.
Реализация блоков вышеприведенного устройства может быть выполнена аналогично устройствам, описанным в известной литературе [«Применение цифровой обработки сигналов» под ред. Э. Оппенгейма, М., Мир, 1980, с. 428, А.В. Рыжиков, Ю.В. Барсуков. Системы и средства обработки сигналов в гидроакустике., Учеб. пособие. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2007 г., Л.В. Орлов., А.А. Шабров. Гидроакустическая аппаратура рыбопромыслового флота // Л., Судостроение, 1982 г., В.С. Бурдик. Анализ гидроакустических систем // Л., Судостроение, 1988 г.].
Реализацию предложенного способа целесообразно рассмотреть на примере работы приведенного на фиг. 1 устройства.
Сформированный в задающем генераторе 3 зондирующий сигнал в виде последовательной пачки однотипных элементарных импульсов (например, с частотной модуляцией) через коммутатор приема-передачи 2, далее передается на антенну 1 и излучается в водную среду. Эхосигналы, принимаемые антенной 1, через коммутатор приема-передачи 2 поступают на вход приемного устройства 4.
В блоке 4 производится набор временных реализаций, соответствующих длительности элементарного импульса ЗС, вычисляются спектры эхосигналов и формируется приемный канал.
В блоке 6 производится вычисление комплексно-сопряженного спектра однотипных элементарных импульсов ЗС, комплексное перемножение его со спектром эхосигналов приемного канала в каждой временной реализации с последующим обратным быстрым преобразованием Фурье (ОБПФ) и вычислением модулей взаимно-ковариационных функций принятого и излученного сигналов. Таким образом, на выходе блока 6 получают набор временных реализаций огибающих эхосигналов от каждого элементарного импульса ЗС.
С выхода блока 5 временные реализации огибающих эхосигналов поступают на вход блока 6 быстрого преобразования Фурье (БПФ), в котором производится вычисление спектров огибающих эхосигналов, которые подаются на вход фильтра 7.
Поскольку спектры огибающих эхосигналов от многобликовых объектов являются, как правило, более высокочастотными, чем спектры огибающих помех, то в блоке 7 производится фильтрация и выделение полосы частот огибающих эхосигналов.
С выхода фильтра 7 комплексные спектры огибающих эхосигналов поступают на вход блока 8 первого БЗУ.
После набора в каждой ячейке блока 8 первого БЗУ спектров N последовательных реализаций производится попарное перемножение в блоках 10 спектра q-й реализации с комплексно-сопряженным спектром (q-1)-й реализации с выхода соответствующего блока 9.
Результаты попарного перемножения с выходов (N-1) блоков 10 суммируются в блоке 11 сумматора.
Полученная в блоке 11 сумма попарных произведений комплексно-сопряженных спектров с использованием ОБПФ в блоке 12 преобразуется в комплексную взаимно-ковариационную функцию (ВКФ). Далее в блоке 13 производится вычисление модулей ВКФ и определение максимального значения модуля в каждой временной реализации.
Максимальное значение модуля ВКФ в каждой реализации характеризует корреляционную связь между огибающими эхосигналов от элементарных импульсов, которые на каждом интервале обработки находятся в N ячейках блока 8 первого БЗУ.
В предложенном алгоритме свертки спектров эхосигналов элементарных импульсов, реализованный в блоках 8-13 используется свойство дистрибутивности операции свертки.
Степень корреляционной связи между соседними выборками в ячейках блока 8 первого БЗУ достаточно полно характеризует корреляционные свойства эхосигналов элементарных импульсов, т.к. при увеличении времени между выборками вследствие динамики движения объекта корреляция эхосигналов может уменьшаться.
С выхода блока 13 максимальные значения модулей ВКФ в каждой временной реализации накапливается в блоке 14 второго БЗУ на выбранном наборе временных реализаций обнаружения объекта. По выборке, накопленной в блоке 14 второго БЗУ, в блоке 15 производится расчет среднего значения, которое поступает на второй вход блока 16 нормирования. В блоке 16 производится нормирование максимальных значений ВКФ для выбранного набора временных реализаций на среднее значение. Результаты нормирования поступают в блок 17 принятия решения об обнаружении, где производится сравнение нормированных максимальных значений ВКФ с заданным в блоке 18 порогом обнаружения и в случае превышения порога принимают решение об обнаружении локального объекта в выбранном наборе временных реализаций.
Достижение технического результата от использования предлагаемого способа подтверждается моделированием работы приведенного на фиг. 1 устройства.
На фиг. 2 приведен результат моделирования когерентной обработки эхосигнала трехбликового объекта в одном приемном канале по способу - прототипу для ЗС, состоящего из 4-х элементарных сложных импульсов. Как видно из фиг. 2, при выборе уровня порога Uпор=7 максимумы эхосигналов не превышают значение порога. Таким образом, когерентная обработка эхосигнала в одном пространственном канале, согласованная с ЗС, не позволила бы обнаружить эхосигнал в способе-прототипе при выбранном отношении сигнал/помеха на входе и пороге Uпорог=7.
На фиг. 3 приведен результат моделирования обработки для тех же условий эхосигнала того же объекта по предлагаемому способу, т.е. вычисления ВКФ огибающих элементарных эхосигналов. Как видно из фиг. 3, максимум ВКФ огибающих эхосигналов превышает значение порога Uпор=7 и решение об обнаружении объекта по предлагаемому способу в выбранном наборе временных реализаций может быть принято.
Приведенные данные позволяют утверждать, что технический результат достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2019 |
|
RU2736097C1 |
| Гидролокационный способ классификации с использованием псевдошумового сигнала | 2020 |
|
RU2735929C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2011 |
|
RU2460088C1 |
| СПОСОБ КЛАССИФИКАЦИИ ЭХО-СИГНАЛА ГИДРОЛОКАТОРА | 2011 |
|
RU2466419C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА И ИЗМЕРЕНИЯ ЕГО ПАРАМЕТРОВ | 2016 |
|
RU2627977C1 |
| Гидролокационный способ классификации объектов | 2022 |
|
RU2791152C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |

Изобретение относится к области гидроакустики и может быть использовано для построения систем обнаружения локальных объектов в условиях распределенных помех различного происхождения. Технический результат - повышение помехоустойчивости обнаружения локальных объектов на фоне распределенной помехи гидролокаторами, которые имеют одноканальный приемный тракт. В способе обнаружения локального объекта на фоне распределенной помехи излучают сложный зондирующий сигнал в виде последовательной пачки из N одинаковых сложных элементарных импульсов. После приема эхосигналов определяют спектр огибающей модуля взаимно-ковариационной функции в каждой временной реализации, соответствующей длительности элементарного импульса. Попарно перемножают сохраненные спектр текущей q-й реализации с комплексно-сопряженным спектром (q-1)-й предыдущей реализации. Полученные (N-1) пар произведений комплексно-сопряженных спектров соседних реализаций суммируют. Определяют путем вычисления обратного преобразования Фурье полученной суммы корреляционную связь между реализациями и определяют максимальное значение модуля взаимно-ковариационной функции. Нормируют все максимумы модулей взаимно-ковариационных функций на определенное среднее значение модулей по выбранному набору временных реализаций. В случае превышения нормированного максимума взаимно-ковариационной функции уровня заданного порога принимают решение о наличии локального объекта в выбранном наборе временных реализаций. 3 ил.
Способ обнаружения локального объекта на фоне распределенной помехи, содержащий излучение сложного зондирующего сигнала, прием эхосигнала, набор временных реализаций для обработки последовательно в одном приемном канале, вычисление спектра принятого сигнала в каждой временной реализации, определение модулей взаимно-ковариационной функции принятого и излученного сигналов путем обратного преобразования Фурье свертки спектра эхосигнала с комплексно-сопряженным спектром излученного сигнала, определение корреляционной связи между реализациями и принятие решения о наличие локального объекта, отличающийся тем, что сложный сигнал формируют как последовательную пачку из N одинаковых сложных элементарных импульсов, определяют спектр огибающей модуля взаимно-ковариационной функции в каждой временной реализации, соответствующей длительности элементарного импульса, сохраняют текущий спектр и спектры огибающих предыдущих (N-1) временных реализаций, производят попарное перемножение спектра в текущей q-й реализации с комплексно-сопряженным спектром (q-1)-й предыдущей реализации, суммируют (N-1) пар произведений комплексно-сопряженных спектров соседних реализаций, корреляционную связь между реализациями определяют путем вычисления обратного преобразования Фурье полученной суммы и определения максимального значения модуля взаимно-ковариационной функции, определяют среднее значение модулей по выбранному набору временных реализаций, нормируют все максимумы модулей взаимно-ковариационных функций на среднее значение, а решение о наличии локального объекта в выбранном наборе временных реализаций принимают в случае превышения нормированного максимума взаимно-ковариационной функции уровня заданного порога.
| Способ обнаружения локального объекта на фоне распределенной помехи | 2019 |
|
RU2736097C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2014 |
|
RU2553730C1 |
| СПОСОБ ПОДАВЛЕНИЯ РЕВЕРБЕРАЦИОННОЙ ПОМЕХИ | 2012 |
|
RU2525701C1 |
| US 9348024 B2, 24.05.2016 | |||
| US 10823832 B2, 03.11 | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |

