Изобретение относится к области гидроакустики и может быть использовано для построения систем обнаружения и классификации эхосигналов от объектов, обнаруженных на дне. В практике построения систем обнаружения обычно рассматривается задача обнаружения эхосигнала на фоне нормальной стационарной помехи. Относительно мощности нормальной стационарной помехи выбирается порог и в соответствии с выбранными критериями и происходит обнаружение эхосигнала. Однако в реальных условиях возникает ситуации, которые требуют использовать для классификации информацию об отсутствии сигнала. Такая информация возникает в том случае если обнаруженная цель или объект имеет возвышение над поверхностью дна, что ограничивает распространение зондирующего сигнала непосредственно за объект, где формируется тень. Методы, основанные на анализе особенностей формы тени, давно используются в современной гидроакустике. Эффективность этих методов определяются ракурсом объекта и его положением относительно углов облучения. (А.А. Корякин, С.А. Смирнов, Г.Я. Яковлев Корабельная гидроакустическая техника СПб «Наука» 2004 г. стр.35-40). Трудности и возможности обнаружения теневого параметра неоднократно обсуждались в научной литературе («О путях увеличения вероятности теневого изображения протяженных объектов» Я.В Моисеенко в Трудах 8 международной конференции «Прикладные технологии гидроакустики и гидрофизики» СПб. 2006 г. стр.161-165). Оценка возможности использования тенеграфического изображения для решения задач классификации рассмотрена применительно к отображению в координатах курс дальность в работе А.Н. Яковлев, Г.П. Каблов «Гидролокаторы ближнего действия» Судостроение 1983 г. Л. стр.122-128.). Тенеграфические методы обнаружения и классификации были приняты при использовании аналоговой аппаратуры, которая отображала информацию во всем динамическом диапазоне принятого эхосигнала, включая и диапазон нулевой видимости, который характерен для тени. Пришедшая на смену аналоговой обработки цифровая обработка эхосигнала при всех достоинствах имела один недостаток, который исключал из рассмотрения сигналы, имеющие нулевой уровень. Это относится к специфике цифровой обработки, когда используется квантование входного сигнала и выбор порогового обнаружителя с использованием процедуры нормирования и центрирования, которая уничтожает все нулевые сигналы, принадлежащие тени. В этих ситуациях необходимо было разработать нестандартные процедуры обработки эхосигналов от целей различных классов при наличии нулевых значений в эхосигнале.
Известен способ автоматической классификации по патенту РФ 2461020, который позволяет классифицировать малоразмерную и крупноразмерную цель, даже находящуюся на дне, однако он не позволяет обнаруживать тень от объекта, который находится на дне.
Известен способ обнаружения локального объекта на фоне распределенной помехи по патенту РФ №2460088, который использует корреляционные свойства отражателей в соседних пространственных каналах и обнаруживает локальные отражатели, но не может обнаруживать тень от них на дне.
Наиболее близким аналогом является навигационная гидроакустическая станция освещения ближней обстановки по патенту РФ №2225991, которая предназначена для обнаружения подводных объектов и измерения их параметров. В станции используются современные цифровые методы обработки входной информации, обнаружение эхосигналов от объектов и представления на индикатор. Недостатком этой станции, как и всех остальных, является невозможность обнаружения тени, по которой можно измерить классификационные параметры объекта, находящегося на дне. Способ обработки информации по этому патенту достаточно подробно изложен в работе А.А. Войтова, Б.М. Казакова, Ю.А. Корнеева «Реализация алгоритмов автоматической обработки информации в гидролокаторах освещения ближней обстановки», опубликованной в Трудах 8 международной конференции «Прикладные технологии гидроакустики и гидрофизики» Спб. 2006 г. стр.460-465. Способ содержит излучение зондирующего сигнала, прием отраженных эхосигналов веером статических характеристик направленности, оптимальную когерентную обработку информации, прореживание временных отсчетов с выбором максимумов, оценку среднего значения, оценку дисперсии, центрирование массива и нормирование массива, адаптивное формирование порогов, обнаружение эхосигналов и отображение гидролокационной информации.
Этому способу присущ тот же недостаток, он не может обнаруживать тень от объекта, обнаруженного на дне.
Указанный недостаток устраняется тем, что в способ, содержащий излучение зондирующего сигнала, прием эхосигнала веером статических характеристик, набор временных реализации последовательно по всем пространственным каналам, когерентную обработку последовательно по всем пространственным каналам, введены дополнительные признаки, а именно после оптимальной обработки производят определение уровня помехи, как результат суммирования всех отсчетов по первому циклу приема по всем пространственным каналам, вычисляют порог обнаружения по среднему значению всех отсчетов Аср, измеренных в первом цикле приема по всем пространственным каналам, производят выбор минимального значения в каждом наборе временных отсчетов последовательно по всем пространственным каналам по правилу 0≤Амин<Аср, запоминают номера пространственных каналов, в которых обнаружены минимальные значения отсчетов, производят выбор максимального отсчета Амакс в каждом наборе отсчетов по всем пространственным каналам, проводят прореживания с оставлением минимального отсчета по правилу из n последовательных отсчетов выбирают наименьший, и максимального отсчета по правилу из n последовательных отсчетов выбирают максимальный, в каждом наборе временных отсчетов по всем пространственным каналам, производят обнаружение превышения эхосигналами выбранного порога обнаружения Амакс>Апорог=кАср последовательно по всем пространственным каналам статического веера характеристик направленности, измеряют и запоминают амплитуды и номера отсчетов сигналов, превысивших порог обнаружения, измеряют и запоминают номера пространственных каналов, в которых произошло обнаружение сигнала, измеряют угловую протяженность УПмакс объекта по количеству пространственных каналов, превысивших порог обнаружения, определяют номера отсчетов и пространственных каналов, в которых не произошло превышение выбранного порога и уровень сигнала в которых, близок к 0, определяют угловую протяженность УПмин области минимальных отсчетов по числу пространственных каналов, в которых 0≤Амин<Аср, и при совпадении угловой протяженности зоны наличия сигнала и угловой протяженности зоны наличия минимального сигнала принимают решения о наличии тени объекта.
Сущность предлагаемого способа заключается в следующем. Основной задачей, которая стоит перед всеми гидролокаторами, является задача обнаружения объекта, что определяется уровнем эхосигнала, который превысил порог. Как правило, порог должен удовлетворять требованиям заданной вероятности правильного обнаружения и заданной вероятности ложной тревоги. Оба этих условия предполагают наличия сигнала больше нулевого уровня, который больше помехи, что исключает обнаружение тени в любых ситуациях. Эхосигнал от локального объект формируется на основе отражения энергии падающего зондирующего сигнала на объект по нормали относительно направления прихода зондирующего сигнала гидролокатора. Это приводит к тому, что при отражении формируется регулярный фронт волны, характеристика которой стабильна на некотором пространственном интервале. (Е.А. Штагер, Е.В. Чаевский Рассеяние волн на телах сложной формы. М. Сов. радио 1974 г). При этом гидролокатор принимает отраженный эхосигнал веером статических характеристик направленности. Поскольку локальный отражатель находится в дальнем поле и имеет ограниченные размеры, то эхосигнал от такого отражателя представляет плоскую, мало искаженную волну и будет приниматься несколькими характеристиками направленности одновременно. Форма огибающей эхосигнала будет определяться тем, насколько отдельные отражающие элементы объекта будут освещены или насколько они будут затенены. Это, прежде всего, относится к отражению от самого объекта. Однако сам объект целиком экранирует донную поверхность и зондирующий сигнал к ней не приходит и от нее не отражается. В этом случае после отраженного эхосигнала интенсивность резко уменьшается, даже по сравнению с сигналом донной реверберации и на вход приемного устройства будет поступать сигнал только интенсивностью объемной реверберации и шума, а сигнал от донного участка будет экранироваться корпусом лежащего на дне объекта. Следовательно, на участке после эхосигнала от объекта на реализации входного процесса образуется своеобразный провал, уровень которого существенно меньше, чем эхосигнал от объекта и меньше, чем уровень донной реверберации, и равен уровню объемной реверберации, действующей на момент прихода эхосигнала после отражения от объектов. Фактически это уровень объемной реверберации будет соответствовать уровню шума на входе приемного устройства. (А.Н. Яковлев, Г.П. Каблов «Гидролокаторы ближнего действия». Судостроение. 1983 г. Л. стр.50). При этом будет отображаться тенеграфический портрет затонувшего объекта, что обработкой, принятой в прототипе, не наблюдалось.
Существующие системы обнаружения имеют своей целью определения наличия эхосигнала от объекта по величине превышения амплитуды эхосигнала от объекта выбранного порога, который выбирается исходя из отношения сигнал помеха. Таким образом, критерием является превышение измеренного уровня эхосигнала над измеренным уровнем помехи. При обнаружения тени возникает противоположная задача, а именно, процедура сравнения амплитуды принятой реализации с порогом, который характеризует отсутствие отражения от объекта с одной стороны, а с другой стороны наличия минимального уровня, который отличается от всех уровней, поступающих на вход приемного устройства. В цифровых системах обработки производится прореживание входной информации, чтобы ограничить объемы передаваемых массивов для отображения и специальная обработка, связанная с нормированием и центрированием, с обеспечением единообразных форматов представления цифровой информации. Как правило, нормирование и центрирование искажает исходную входную информацию и пагубно сказывается на качестве и достоверности тенеграфического отображения. Поэтому нет необходимости использования центрирования и нормирования в интересах представления тенеграфической информации.
Блок схема устройства, реализующая рассматриваемый способ представлена на рисунке 1.
Антенна 1 через коммутатор 2 приема передачи, через систему 5 формирования характеристик направленности (СФХН), через первый вход системы 6 многоканальной обработки, спецпроцессор 7, содержащий последовательно соединенные блок 8 определения среднего значения помехи и порогового значения, блок 9 определения минимальных и и максимальных значений, блок 10 прореживания, блок 11 определения угловой протяженности УПмакс отсчетов, превысивших порог, блок 12 определения угловой протяженности УПмин отсчетов, не превысивших порог, блок 13 принятия решения, управления и отображения соединена со вторым входом системы 6 многоканальной обработки. Второй выход блока 13 принятия решения, управления и отображения через задающий генератор 4, через усилитель мощности 3 соединен со вторым входом коммутатора 2.
Система работает следующим образом.
В блоке 13 принятия решения, управления и отображения формируется сигнал управления, передается на задающий генератора 4 и, излучаемый зондирующий сигнала через усилитель мощности 3, поступает на коммутатор приема передачи 2, передается на антенну 1 и излучается в водную среду. Задающий генератор, усилитель мощности и коммутатор приема передачи могут быть выполнены, например, по схеме стр.39-41 Колчеданцев А.С. Гидроакустические станции Л. Судостроение 1982 г., они же используются в патенте РФ №2225991. Отраженный эхосигнал принимается антенной 1, через коммутатор 2 и через систему 5 формирования характеристики направленности (СФХН) поступает на вход многоканальной системы обработки 6. Антенна и система формирования характеристик направленности являются известными устройствами, рассмотренные, например, в Л.В. Орлов, А.А. Шабров Гидроакустическая аппаратура рыбопромыслового флота. Л. Судостроение 1987 г. Стр.116 или Смарышев М.Д. Добровольский Ю.Ю. Гидроакустические антенны Л. Судостроение 1984 г. С выхода каждого канала СФХН сигнал поступает на вход многоканальной системы обработки 6, где происходит оптимальная обработка принятых эхосигналов. Многоканальная система обработки является известным устройством, приведенным, например, в B.C. Бурдик «Анализ гидроакустических систем» Л. Судостроение 1988 г. стр 365.
В современных гидроакустических комплексах СФХН и системы многоканальной оптимальной обработки реализуются с использованием цифровой вычислительной техники на спецпроцессорах, как это реализовано в прототипе по патенту РФ №2225991.
С выхода системы 6 многоканальной оптимальной обработки цифровые отсчеты последовательно по каждому каналу поступают в спецпроцессор 7, основная задача которого является не только обнаружения эхосигнала от объекта, но и выявление тени от обнаруженного объекта, отображение ее, и измерение параметров эхосигнала и тени. Сигналы, преобразованные в цифровой вид, обрабатываются специальными цифровыми процессорами на основе разработанных алгоритмов, (см. Ю.А. Корякин С.А. Смирнов Г.В. Яковлев «Корабельная гидроакустическая техника» СПб Наука 2004 г. стр.164-176, стр.278-295). В процессоре реализуются все блоки предлагаемого устройства. В блоке 8 определяется среднее значение всех отсчетов принятых по первому циклу обработки всеми характеристиками направленности, которое является средним значением помехи Аср и, по которому вырабатывается порог обнаружения. На основании среднего значения помехи определяется минимальное пороговое значение эхосигналов, которые находятся в диапазоне значений 0≤Амин<Аср в блоке 9. Запоминаются их значения, временное положение и пространственное положение. Таким образом, в блоке 9 определяется зона наличия области тенеграфической информации, которая определяется минимальным значением сигнала, которое меньше Аср помехи. Значение Амин, равное 0, не является определяющим поскольку из-за дифракции возможна некоторая подсветка зоны тени. Одновременно в блоке 9 производится обнаружение максимальное значение эхосигнала Амак>Апорог=кАср, что характеризует отражательные свойства объекта. Эта величина отличается от стандартного значения порога, который выбирается из условий обеспечения вероятности ложной тревоги и вероятности правильного обнаружения. Критерием является наличие сигнала и отсутствие сигнала, которая характерна для принятой системы обработки и выбранного типа гидролокатора. Эта градация определяется значением коэффициента к, который определяется при проведении настроечных и калибровочных работ и динамическим диапазоном отображения эхосигналов на индикаторе обнаружения. Наличие минимального сигнала и максимального сигнала позволяют повести прореживание с сохранением всего динамического диапазона эхосигнала в блоке 10. Прореживание имеет целью сократить объем передаваемой информации и в то же время сохранить амплитудные соотношения необходимые для выделения классификационных признаков. После определения предполагаемой зоны тени производится прореживания избыточной информации, которая меньше максимального значения эхосигнала. Для этого определяется минимальный отсчет в каждом наборе, и проводят прореживание с оставлением минимального отсчета по правилу из n последовательных отсчетов выбирается наименьший отсчет. Для максимального отсчета так же существует правило, по которому из n последовательных отсчетов выбирается максимальный отсчет. Происходит отсев средних значений, которые не являются определяющими для характеристик объекта. Каждый оставшийся отсчет имеет значение амплитуды, значение временного положения, номер характеристики направленности, которой принадлежат амплитуда и временной отсчет. Поскольку область тени жестко связана с областью наличия эхосигнала, то единственной общей характеристикой является угловая протяженность зоны эхосигнала и зоны тени. Отдельно определяется угловая протяженность зоны сигнала УПмакс в блоке 11 измерения угловой протяженности сигналов по условию Амак>Апорог=кАср. и для тени в блоке 12 определяется угловая протяженность отсчетов тени УПмин, для которых выполняется условие 0≤Амин<Аср. Измеренные значения УПмин и УПмакс поступают в блок 13 для принятия решения о наличии тени, сюда же поступают амплитуды отсчетов тени. Блок 13 принятия решения, управления и отображения регулирует работу гидролокатора и определяет вид излучаемого сигнала и задает ее в блоке 4 и процедуру оптимальной многоканальной обработки в блоке 6. В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также измерение параметров эхосигнала и тени и принятие решения о цели. Эти вопросы достаточно подробно рассмотрены в книге «Применение цифровой обработки сигналов» п\р Оппенгейма М. Мир 1980 г. и в отечественной аппаратуре. Ю.А. Корякин С.А. Смирнов Г.В. Яковлев «Корабельная гидроакустическая техника» СПб Наука 2004 г. стр.164-176, стр.278-295.
Таким образом, предлагаемая процедура обработки входной информации гидролокатора позволяет сохранить весь динамический диапазон входных сигналов и обеспечит выделения не только эхосигналов превысивших порог, но и выделения тенеграфической информации, по виду которой можно повысить вероятность правильной классификации обнаруженного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки и классификации гидролокационной информации | 2019 |
|
RU2725517C1 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2726312C1 |
| Гидролокационный способ классификации с использованием псевдошумового сигнала | 2020 |
|
RU2735929C1 |
| Гидроакустический способ определения параметров цели при использовании взрывного сигнала с беспроводной системой связи | 2018 |
|
RU2692841C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2011 |
|
RU2461020C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТА В ВОДНОЙ СРЕДЕ | 2015 |
|
RU2602759C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529441C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АЙСБЕРГА ГИДРОЛОКАЦИОННЫМ МЕТОДОМ | 2016 |
|
RU2619311C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2011 |
|
RU2465618C1 |
Использование: гидроакустика. Сущность: способ содержит излучение зондирующего сигнала, прием эхосигнала веером статических характеристик, набор временной реализации последовательно по всем пространственным каналам, обработку последовательно по всем пространственным каналам, определение уровня помехи, как результат суммирования всех отсчетов по первому циклу приема по всем пространственным каналам, вычисляют порог обнаружения по среднему значению всех отсчетов Аср, производят выбор минимального значения в каждом наборе временных отсчетов огибающей последовательно по всем пространственным каналам по правилу 0≤Амин<Аср, запоминают номера пространственных каналов, в которых обнаружены минимальные значения огибающих, производят выбор максимального отсчета Амакс в каждом наборе отсчетов огибающей по всем пространственным каналам, проводят прореживания с оставлением минимального отсчета по правилу п последовательных отсчетов выбирают наименьший, и максимального отсчета по правилу из n последовательных отсчетов выбирают максимальный, в каждом наборе временных отсчетов огибающей по всем пространственным каналам, производят автоматическое обнаружения превышения эхосигналами выбранного порога обнаружения Амакс>Апорог=кАср последовательно по всем пространственным каналам статического веера характеристик направленности, измеряют и запоминают амплитуды и номера отсчетов сигналов, превысивших порог обнаружения, измеряют и запоминают номера пространственных каналов, в которых произошло обнаружение сигнала, измеряют угловую протяженность УПмак объекта по количеству пространственных каналов, превысивших порог обнаружения, определяют номера отсчетов и пространственных каналов, в которых не произошло превышение выбранного порога и уровень сигнала в которых близок к 0, определяют угловую протяженность УПмин области минимальных отсчетов по числу пространственных каналов, в которых 0≤Амин<Аср, и при совпадении угловых протяженностей принимают решения о наличии тени объекта. Технический результат: повышение информативность входной информации за счет выделения тенеграфических особенностей эхосигнала от объекта.1 ил.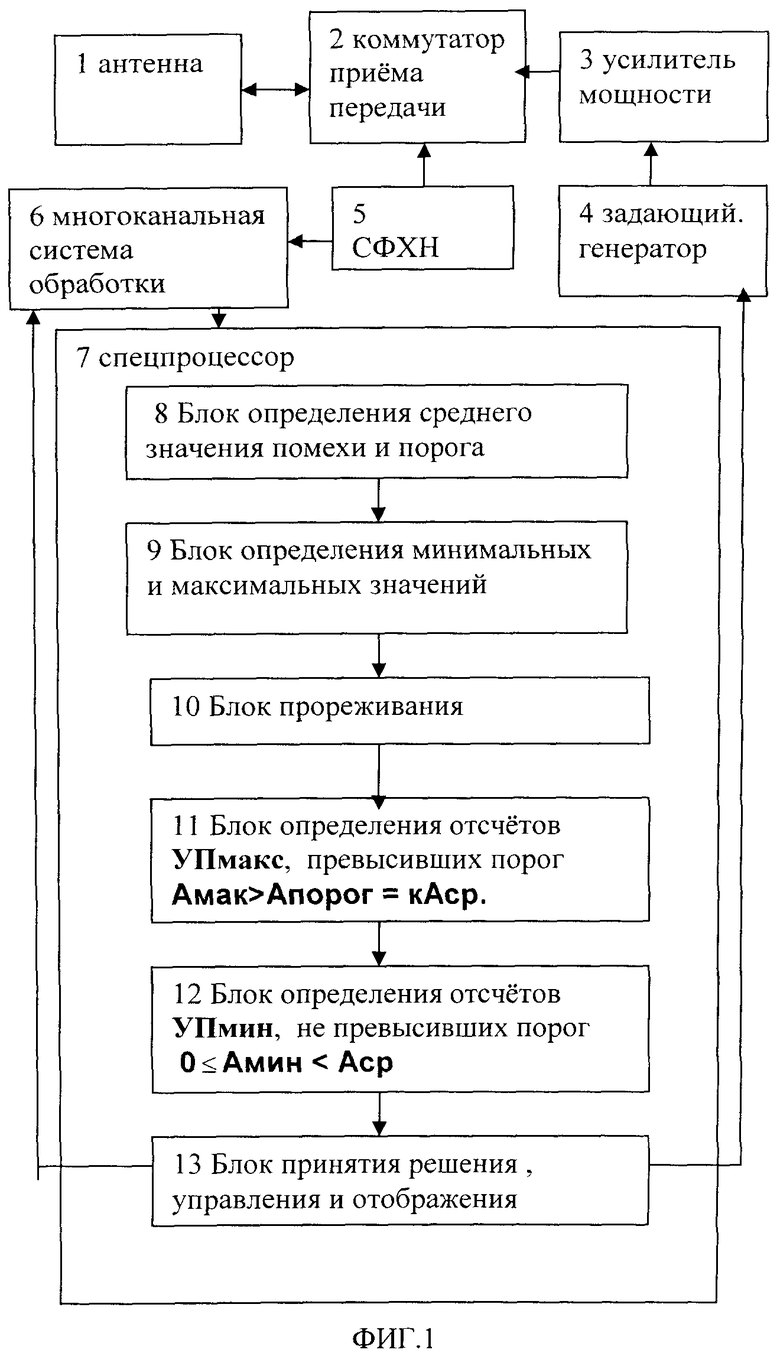
Способ обработки эхосигналов гидролокатора, содержащий излучение зондирующего сигнала, прием эхосигнала веером статических характеристик направленности, набор временной реализации последовательно по всем пространственным каналам, оптимальную когерентную обработку по всем пространственным каналам, отличающийся тем, что после оптимальной обработки производят определение уровня помехи, как результат суммирования всех отсчетов по первому циклу приема по всем пространственным каналам, вычисляют порог обнаружения по среднему значению всех отсчетов Аср, измеренных в первом цикле приема по всем пространственным каналам, производят выбор минимального значения в каждом наборе временных отсчетов огибающей последовательно по всем пространственным каналам по правилу 0≤Амин<Аср, запоминают номера пространственных каналов, в которых обнаружены минимальные значения огибающих, производят выбор максимального отсчета Амакс в каждом наборе отсчетов огибающей по всем пространственным каналам, проводят прореживания с оставлением минимального отсчета по правилу из n последовательных отсчетов выбирают наименьший, и максимального отсчета по правилу из n последовательных отсчетов выбирают максимальный, в каждом наборе временных отсчетов огибающей по всем пространственным каналам, производят обнаружение превышения эхосигналами выбранного порога обнаружения Амакс>Апорог=кАср последовательно по всем пространственным каналам статического веера характеристик направленности, измеряют и запоминают амплитуды и номера отсчетов сигналов, превысивших порог обнаружения, измеряют и запоминают номера пространственных каналов, в которых произошло обнаружение сигнала, измеряют угловую протяженность УПмакс объекта по количеству пространственных каналов, превысивших порог обнаружения, определяют номера отсчетов и пространственных каналов, в которых не произошло превышение выбранного порога и уровень сигнала в которых близок к нулю, определяют угловую протяженность УПмин области минимальных отсчетов по числу пространственных каналов, в которых 0≤Амин<Аср, и при совпадении угловой протяженности зоны наличия сигнала и угловой протяженности зоны наличия минимального сигнала принимают решения о наличии тени объекта.
| Способ пространственной обработки эхо-сигналов | 1991 |
|
SU1796063A3 |
| СПОСОБ КЛАССИФИКАЦИИ ЭХО-СИГНАЛА ГИДРОЛОКАТОРА | 2011 |
|
RU2466419C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2011 |
|
RU2461020C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЭХОСИГНАЛА ГИДРОЛОКАТОРА | 2005 |
|
RU2293358C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| US 3827022 A, 30.07.1974 | |||

