Изобретение относится к техническим средствам автоматизации, а именно к электронным адаптивным трехпозиционным регуляторам. Оно может быть использовано при автоматизации работы нагревательных печей, экструдеров и литьевых машин, реакторов, бытовых и промышленных холодильников и иных объектов для позиционного регулирования в них одной технологической величины (температуры, давления и т.п.) путем подачи позиционных управляющих воздействий типа «включено»/«выключено».
Известны трехпозиционные регуляторы с фиксированными позициями (см., например, А.А.Кампе-Немм «Автоматическое двухпозиционное регулирование». - М.: Наука, 1967. - 160 с.), которые не обеспечивают качественного регулирования.
Улучшения качества удается добиться путем создания позиционных регуляторов с адаптирующейся к нагрузке объекта средней позицией регулятора, изменяющейся в сторону работающей крайней позиции аналоговым (см. авт.св. СССР №675399, Кл. G05B 11/56, 1979) или дискретным (см. авт.св. СССР №1554628, Кл. G05B 11/56, 1989 или авт.св. СССР №1802606, Кл. G05B 11/18, 1992) способом.
Характерной особенностью данного класса регуляторов является адаптация средней позиции к значениям крайних, причем, при дискретном способе реализации подстройки средней позиции к крайней, используется либо реверсивный шаговый двигатель (авт.св. №1554628), либо реверсивный счетчик и преобразователь результата счета (кода счетчика) в дискретный сигнал (авт.св. №1802606) в виде цифроаналогового преобразователя (ЦАП).
Иначе говоря, в данном классе адаптивных позиционных регуляторов мощность, подводимая к объекту регулирования при нахождении регулируемой величины в зоне нечувствительности регулятора, т.е. при работе регулятора на средней позиции, определяется уровнем сигнала этой позиции.
Общим недостатком такого класса адаптивных позиционных регуляторов является сложность использования сигнала средней позиции, находящегося между значениями сигналов крайних позиций, в исполнительном устройстве объекта регулирования, например электрическом нагревателе тепловой печи или двигателе компрессорного холодильника, из-за сложности сопряжения регулятора, работающего на средней позиции с ними, так как данные исполнительные устройства удобнее всего использовать в режимах «включено»/«выключено».
В этом плане наиболее близким техническим решением, принятым за прототип, является позиционный регулятор по патенту РФ №2047210, Кл. G05B 11/18, 1995, в котором используется сигнал средней позиции, равный по уровню сигналам только крайних позиций, который подается импульсами, а адаптация средней позиции обеспечивается изменением скважности этих сигналов при постоянном периоде их следования.
Иначе, в регуляторе прототипе по патенту РФ №2047210 мощность, подводимая к объекту регулирования при нахождении регулируемой величины в зоне нечувствительности, определяется скважностью импульсных сигналов средней позиции при постоянном периоде следования импульсов (напомним, что скважностью импульсных сигналов называют отношение периода повторения импульсов к длительности самого импульса).
Применение регуляторов с такой адаптацией средней позиции эффективно в применении к объектам с исполнительными устройствами, работающим в режиме «включено»/«выключено», и приводит к улучшению качества регулирования технологической величины объекта и некоторому снижению энергетических затрат, потребляемых объектом.
В то же время, если исполнительное устройства объекта имеет индуктивный характер включения, например, как двигатель компрессионных холодильников, который при включении потребляет существенно больше энергии, чем после его выхода в нормальный режим работы, то применение для адаптации средней позиции регулятора изменения скважности импульсных сигналов средней позиции при постоянном периоде следования импульсов окажется малоэффективным с точки зрения снижения энергетических затрат, потребляемых объектом.
Предложен регулятор, в котором используется сигнал средней позиции, равный по уровню сигналам только крайних позиций, который подается постоянными импульсами, а адаптация обеспечивается изменением скважности, но путем изменения периода следования этих импульсов.
Иначе, предлагается регулятор, в котором скважность импульсных сигналов средней позицией изменяется не за счет изменения длительности импульса при постоянном периоде следования импульсов, а путем изменения периода следования импульсов при постоянстве самого импульса включения исполнительного устройства.
При таком регулировании уменьшается среднее число включений исполнительного устройства на интервале работы регулируемого объекта и, соответственно, имеет место, наряду с улучшением качества регулирования, и существенно большая экономия энергии, потребляемой объектом регулирования с индуктивным характером включения исполнительного устройства.
Для реализации такого регулятора код реверсивного счетчика, соответствующий результату счета выхода регулируемой величины из зоны нечувствительности регулятора, подается на дешифратор DC для сигнализации включаемой адаптивной средней позиции регулятора и через устройство логического управления (УЛУ) на генератор сверхнизких частот с дискретно изменяющимся периодом выходных импульсов - ГСНЧИП (в случае управления, например, бытовым холодильником), включающий генератор постоянных импульсов (ГПИ), задающий (в случае управления бытовым холодильником) время включения компрессора холодильника, которое является постоянным при данной нагрузке объекта.
Схема устройства приведена на чертеже.
Адаптивный трехпозиционный регулятор содержит генератор сверхнизких частот с дискретно изменяющимся периодом импульса (ГСНЧИП) 1, генератор постоянных импульсов (ГПИ) 2, элемент И 3, два инвертора 4, 5, два задатчика 6, 7 зоны нечувствительности, входы которых подключены к первому и третьему входам двухпорогового компаратора 8, второй вход которого является входом регулируемой величины Ue, первый и третий выходы двухпорогового компаратора через первый 4 и второй 5 инверторы соединены со счетными входами реверсивного двоичного счетчика (СТ 2) 9, соответственно с суммирующим (+1) и вычитающим (-1), а его выходы Q1-Q4 - с соответствующими управляющими входами дешифратора «4 на 16» (DC) 10, шестнадцать выходов которого соединены со входами шестнадцати светодиодов 11, выходы которых соединены с общей шиной (корпусом). Кроме того, выходы Q1-Q4 соединены с входами устройства логического управления (УЛУ) 12, выходы которого 1-4 управляют замыкающимися контактами K1-K4 13 ГСНЧИП 1, выход которого Uвых соединен со входом ГПИ 2, выход которого, в свою очередь, соединен с первым входом элемента И 3, второй вход которого соединен со вторым выходом двухпорогового компаратора 8, а выход - с первым входом элемента ИЛИ 14, второй вход которого соединен с выходом первого инвертора 4, а выход - с первым выходным каналом управления «а» регулятора, второй канал управления «b» которого соединен с выходом второго инвертора 5 и может быть использован, например, для подключения нагревателя при включении режима оттаивания холодильника.
Синхронизирующий вход C реверсивного счетчика 9 и его вход обнуления Ro соединены с элементом обнуления и установки исходного значения кода средней позиции регулятора 15 (кнопкой), причем вход С - через элемент задержки τ 16.
Генератор сверхнизких частот с дискретно изменяющимся периодом выходных импульсов (ГСНЧИП) 2, в свою очередь, состоит из обычного генератора сверхнизких частот (ГСНЧ) 17 (см., например, Шелестов И.П. Радиолюбителям: полезные схемы. - М.: СОЛОН - Пресс, 2003, раздел 5.1.8. Генератор сверхнизких частот. - с.175), к входу A которого параллельно конденсатору C1 подключены через замыкающиеся контакты K1 и К3 13, соответственно, конденсаторы C1 1 и C1 2 (18), а к входам C и B последовательно резистору R1 подключены, соответственно, резисторы R1 1 и R1 2 (19), параллельно которым подключены, соответственно, замыкающиеся контакты K3 и K4 13.
Устройство работает следующим образом.
При значениях U1<Ue<U2, где Ue - текущее значение регулируемой величины, U1 и U2 - заданные опорные значения, определяемые задатчиками 6 и 7, на выходе элемента И компаратора 8 имеем единичный уровень сигнала, а на выходах инверторов 4, 5 - нулевые.
При превышении входным сигналом Ue значения U2, т.е. при появлении условия Ue>U2, на выходе инвертора 4 появляется единичный сигнал, увеличивающий счет счетчика 9 и поступающий также в канал управления «а» регулятора. При снижении входного сигнала Ue за значение U1, т.е. при условии Ue<U1, имеем единичный сигнал на выходе инвертора 5 и в канале «b» регулятора и, соответственно, уменьшение счета счетчика 9.
Двоичное значение сигнала счетчика - его выходной код, определяемый его входными единичными или нулевыми сигналами Q1-Q4, является управляющим входным кодом дешифратора (DC) «4 на 16» 10 и устройства логического управления (УЛУ) 12. Дешифратор 10 преобразует входной код в выходные сигналы, появляющиеся на одном из шестнадцати выходах дешифратора, соединенных со светодиодами 11, которые сигнализируют о работе одной из шестнадцати адаптивной средней позиции регулятора. УЛУ 12 преобразует входной код в единичные или нулевые сигналы на его выходах 1-4, управляющих замыкающимися контактами K1-K4 13, причем замыкание соответствующего контакта происходит при единичном выходном сигнале на выходах 1-4 УЛУ. При этом в зависимости от сочетания подключаемых резисторов R1 1 и R1 2 и конденсаторов C1 1 и C1 2 на выходе генератора ГСНЧИП 1 будет иметь место тот или иной период следования импульсов, которые включают в работу ГПИ 2.
При поступлении единичного сигнала на второй вход элемента И 3 с двухпорогового компаратора 8, т.е. при нахождении регулируемой величины в зоне нечувствительности регулятора (U1<Ue<U2), и поступлении на первый вход прямоугольных постоянных по времени импульсов с генератора ГПИ 2 аналогичные импульсы формируются на выходе элемента ИЛИ 14, т.е. в канале управления «а» регулятора.
Рассмотрим формирование меняющегося периода импульсов в ГСНЧИП. Известно, что в генераторе сверхнизких частот (ГСНЧ) период Т следования импульсов (см. вышеупомянутую книгу И.П.Шелестова) определяется приближенно выражением:

где размерность R1 берется в мегоомах, а C1 - в микрофарадах.
Изменение периода в ГСНЧИП основано на изменении суммарно подключаемого резистора между точками C и B и суммарно подключаемой емкости к точке A ГСНЧ.
Суммарно подключаемая емкость C в общем виде определяется выражением:

а суммарно подключаемый резистор R:

При четырех контактах K1-K4, принимающих одно из двух значений: замкнут или разомкнут, будем иметь N=24=16 возможных сочетаний значений произведений C*R, что может быть представлено следующей таблицей.
Значения резисторов и конденсаторов подбираются так, чтобы значения результирующих периодов, определяемые последней колонкой таблицы, менялись от минимального значения  до максимального
до максимального
 с примерно постоянным шагом. Например, если принять, что R1 1<R1 2 и C1 1<C1 2, то строки таблицы по мере возрастания периода можно ранжировать так: 13, 15, 5, 14, 7, 16, 9, 6, 11, 1, 8, 10, 3, 12, 2 и 4. Задача УЛУ обеспечить эту ранжировку путем замыкания соответствующих контактов K1-K4 при соответствующих выходных кодах реверсивного счетчика. В этом плане УЛУ играет роль дешифратора кодов реверсивного счетчика в команды, управляющие контактами K1-K4.
с примерно постоянным шагом. Например, если принять, что R1 1<R1 2 и C1 1<C1 2, то строки таблицы по мере возрастания периода можно ранжировать так: 13, 15, 5, 14, 7, 16, 9, 6, 11, 1, 8, 10, 3, 12, 2 и 4. Задача УЛУ обеспечить эту ранжировку путем замыкания соответствующих контактов K1-K4 при соответствующих выходных кодах реверсивного счетчика. В этом плане УЛУ играет роль дешифратора кодов реверсивного счетчика в команды, управляющие контактами K1-K4.
Пусть, например, конденсатор C1 имеет емкость 3 мкФ, а резистор R1 сопротивление 6 Ом. Тогда ГСНЧПИ будет обеспечивать минимальный период колебаний, равный Т≈100*R1*C1 сек=1800 сек=30 мин=0,5 часа. Приняв С1 1=0,45 мкФ, C1 2=0,90 мкФ, R1 1=0,55 Ом, a R1 2=1,175 Ом, получим ранжированный ряд значений периодов ГСНЧИП (в минутах): 30.00; 32.75; 34.50; 35.88; 37.67; 38.63; 39.00; 41.25; 42.58; 43.50; 44.42; 46.63; 47.48; 50.22; 52.02; 56.00. Эти значения периодов соответствуют значениям строк из таблицы в соответствии с рядом: 13, 15, 5, 14, 7, 16, 9, 6, 11, 1, 8, 10, 3, 12, 2 и 4. Максимальное значение периода при взятых значениях параметров резисторов и конденсаторов будет составлять: T≈100*(C1+C1 1+C1 2)*(R1+R1 1+R1 2) сек=3360 сек=56 мин - 0,933(3) часа.
Оценим работу объекта, например, компрессионного холодильника при работе с регулятором прототипом и предлагаемым. Пусть объект работает с нагрузкой в 60%, а период колебаний при работе на средней позиции в регуляторе прототипе составляет Та=45 мин. Тогда, после адаптации средней позиции регулятора под нагрузку объекта, время включения компрессора холодильника будет составлять 27 мин, а время останова - 18 мин, так как при нагрузке N=60% отношение времени включения Твкл. к времени выключения Твыкл. при релейном регулировании составляет 1,5 (см. например, Копелович А.П. Инженерные методы расчета при выборе автоматических регуляторов. - М.: Металлургиздат, 1960. - С.105), т.е. Твкл./Твыкл.=1,5, а их сумма равна периоду колебаний, т.е. Твкл.+Твыкл.=Та=45 мин. При таком периоде работы за сутки компрессор холодильника включится в работу 24×60 мин/45 мин=32 раза, а общее время его работы за сутки составит 27 мин ×32=864 мин.
Для предлагаемого регулятора примем, что время включения компрессора холодильника на средней позиции постоянное и составляет Твкл.=33 мин. В результате адаптации к нагрузке объекта (N=60%) период колебаний работы холодильника составит 55 мин (при этом Твкл./Твыкл.=1,5), а время не работы холодильника - Твыкл.=22 мин. При таком периоде работы за сутки компрессор холодильника включится в работу 24×60 мин/55 мин ≈ 26,18 (18) раз, а общее время его работы за сутки составит, как и ранее, 33 мин × 26,18 (18) = 864 мин.
Таким образом, общее число включений холодильника при данной нагрузке (N=60%) уменьшается в 32/26,18≈1,22 раза, что составляет сокращение числа включений объекта на 18,75%. Так как такое сокращение связано с сокращением включений индуктивной нагрузки исполнительного устройства - компрессора компрессионного холодильника, то на 18,75% снижается потребление энергии, затрачиваемой при его включении.
Таким образом, схема, приведенная на чертеже, может быть успешно применена, например, для управления бытовым или промышленным холодильником при фиксированной нагрузке его работы или на других подобных объектах с индуктивной нагрузкой исполнительного устройства для экономии энергетических затрат при запуске этих исполнительных устройств. В силу адаптивной подстройки средней позиции регулятора качество регулирования технологической величины в объекте регулирования будет одинаковым как в устройстве прототипе, так и в предлагаемом, но оно существенно лучше, чем в традиционных позиционных системах регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1992 |
|
RU2047210C1 |
| ДВУХПОЗИЦИОННЫЙ АДАПТИВНЫЙ ЭЛЕКТРОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2138071C1 |
| Логарифмический аналого-цифровой преобразователь | 1990 |
|
SU1725397A1 |
| Способ регулирования номинального тока управляющего электромагнита привода летательного аппарата и устройство для его осуществления | 2015 |
|
RU2606213C1 |
| Устройство контроля качества радиотелефонных каналов связи | 1986 |
|
SU1332546A2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ВОДОПОТРЕБЛЕНИЯ | 2001 |
|
RU2218558C2 |
| Устройство для измерения нелинейности пилообразного напряжения | 1990 |
|
SU1777101A1 |
| Секционированная электротермическая установка | 1986 |
|
SU1457175A1 |
| Устройство автоматической регулировки усиления | 1986 |
|
SU1356204A1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ИЗМЕРИТЕЛЬ РАЗМЕРОВ ОБЪЕКТА | 1990 |
|
RU2043602C1 |
Изобретение относится к техническим средствам автоматизации, а именно к электронным адаптивным трехпозиционным регуляторам. Технический результат заключается в улучшении качества регулирования технологической величины объекта и снижении энергетических затрат, потребляемых объектом. Заявленное устройство содержит два инвертора и два задатчика зоны нечувствительности, двухпороговый компаратор, реверсивный счетчик, элемент задержки, элемент И, элемент ИЛИ, введены генератор сверхнизких частот с дискретно изменяющимся периодом выходных импульсов, генератор постоянных импульсов, устройство логического управления, дешифратор и светодиоды, соединенные с каждым из выходов дешифратора, выходы которых соединены с общей шиной (корпусом). Входы дешифратора соединены с выходами реверсивного счетчика и входами устройства логического управления, выходы которого соединены с управляющими входами замыкающихся контактов K1-K4 генератора сверхнизких частот с дискретно изменяющимся периодом выходных импульсов, выход которого соединен с запускающим входом генератора постоянных импульсов, выход которого соединен со вторым входом элемента И. В регуляторе скважность импульсных сигналов средней позицией изменяется путем изменения периода следования импульсов при постоянстве самого импульса включения исполнительного устройства. 1 ил., 1табл.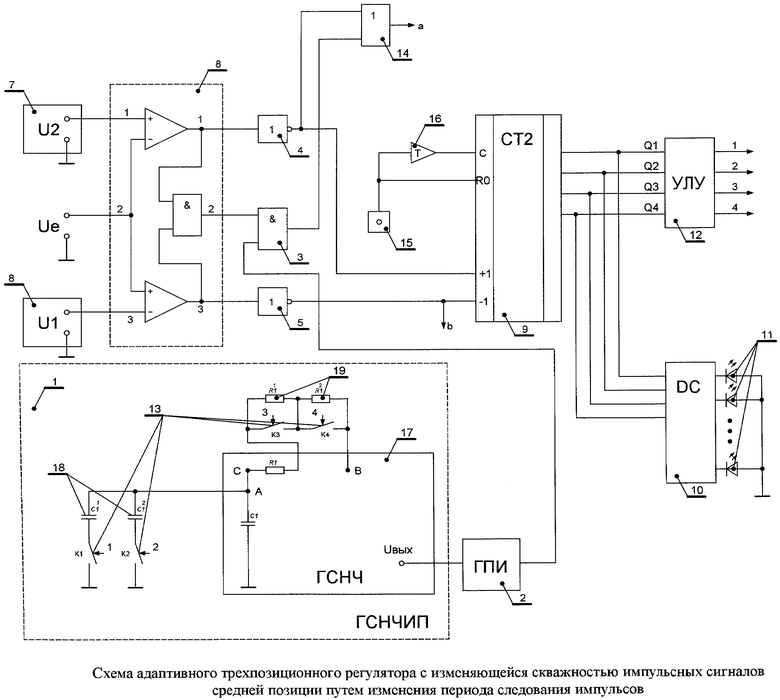
Адаптивный трехпозиционный регулятор, содержащий два инвертора и два задатчика зоны нечувствительности, выходы которых подключены к первому и третьему входам двухпорогового компаратора, а второй вход является входом регулируемой величины регулятора, первый и третий выходы двухпорогового компаратора через первый и второй инверторы соединены соответственно с суммирующим и вычитающим входами реверсивного счетчика, вход обнуления и синхронизирующий вход которого соединены с выходом элемента обнуления и установки исходного значения средней позиции соответственно непосредственно и через элемент задержки, второй выход двухпорогового компаратора соединен с первым входом элемента И, выход которого соединен с первым входом элемента ИЛИ, второй вход которого соединен с выходом первого инвертора, а его выход соединен с первым выходным каналом регулятора, второй выходной канал которого соединен с выходом второго инвертора, отличающийся тем, что в него введены генератор сверхнизких частот с дискретно изменяющимся периодом выходных импульсов, генератор постоянных импульсов, устройство логического управления, дешифратор и светодиоды, соединенные с каждым из выходов дешифратора, выходы которых соединены с общей шиной (корпусом), входы дешифратора соединены с выходами реверсивного счетчика и входами устройства логического управления, выходы которого соединены с управляющими входами замыкающихся контактов генератора сверхнизких частот с дискретно изменяющимся периодом выходных импульсов, выход которого соединен с запускающим входом генератора постоянных импульсов, выход которого соединен со вторым входом элемента И.
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1992 |
|
RU2047210C1 |
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1990 |
|
SU1802606A1 |
| Адаптивный регулятор | 1985 |
|
SU1339487A1 |
| Адаптивный регулятор для управляемых выпрямителей | 1978 |
|
SU898581A1 |
| JP 62089491 A, 23.04.1987. | |||

