Изобретение относится к техническим средствам автоматизации, а именно к электронным позиционным регуляторам. Оно может быть использовано при автоматизации работы нагревательных печей, экструдеров и литьевых машин, реакторов и иных объектов для регулирования одной технологической величины путем управляющих воздействий.
Известны трехпозиционные регуляторы с фиксированными позициями, что не обеспечивает качественного регулирования.
Улучшения качества удается добиться путем создания позиционных регуляторов с адаптирующейся к нагрузке объекта средней позицией регулятора, изменяющейся к одной из крайних позиций аналоговым [1] или дискретным способом [2] (заявка N 4885741/24, кл. G 05 B 11/18 положительное решение от 27.09.91 г).
Характерной особенностью данного класса регуляторов является адаптация средней позиции к значениям крайних, причем при дискретном способе реализации этой особенности используется либо реверсивный шаговый двигатель (авт. св. N 1554628), либо реверсивный счетчик и преобразователь результата счета (кода счетчика) в дискретный сигнал (заявка N 4885741/24 прототип) в виде цифроаналогового преобразователя (ЦАП).
Иначе говоря, в данном классе адаптивных позиционных регуляторов мощность, подводимая к объекту при нахождении регулируемой величины в зоне регулирования, т.е. при работе регулятора на средней позиции, определяется уровнем сигнала этой позиции.
Общим недостатком такого класса адаптивных позиционных регуляторов является сложность использования сигнала средней позиции регулятора, находящегося между значениями сигналов крайних позиций, в исполнительном устройстве, например электрическом нагревателе, из-за сложности устройства сопряжения регулятора с ним.
Сущность изобретения заключается в использовании сигнала средней позиции, равного по уровню сигналам только крайних позиций, который подается импульсами, причем адаптация обеспечивается изменением скважности этих сигналов.
Таким образом, в предлагаемом регуляторе мощность, подводимая к объекту при нахождении регулируемой величины в зоне регулирования, определяется скважностью импульсных сигналов средней позиции.
Для реализации такого регулятора код реверсивного счетчика, соответствующий результату счета выхода регулируемой величины из зоны регулирования, подается на мультиплексор, к входам которого подведены сигналы с генераторов прямоугольных импульсов (ГПИ) или таймер-генератора.
Схема устройства приведена на фиг.1.
Позиционный регулятор содержит мультиплексор 1, элементы И2, ИЛИ 3, два интегратора 4,5 и два задатчика 6,7 зоны нечувствительности, выходы которых подключены к первому и второму входам двухпорогового компаратора 8, третий вход которого является входом регулируемой величины Uе, первый и третий выходы через первый 4 и второй 5 инверторы соединены со счетными входами реверсивного двоичного счетчика 9, соответственно с суммирующим (+1) и вычитающим (-1), а его выходы Q1-Q4 с соответствующими управляющими входами мультиплексора 1, выход которого соединен с первым входом элемента И2, второй вход которого соединен с вторым выходом двухпорогового компаратора 8, а выход с первым входом элемента ИЛИ 3, второй вход которого соединен с выходом инвертора 5, а выход с первым выходным каналом управления регулятора a, второй канал управления b которого соединен с выходом первого инвертора 4. Входные каналы мультиплексора 1 соединены с выходными каналами 0-7 таймер-генератора 10 или генераторами прямоугольных импульсов (ГПИ), а синхронизирующий вход С реверсивного счетчика 9 и его вход обнуления Ro соединены с элементом 11 обнуления и установки исходного значения средней позиции регулятора, причем вход С через элемент задержки 12.
Устройство работает следующим образом. При значениях U1 < Ue < U2, где Uе текущее значение регулируемой величины, U1 и U2 заданные опорные значения определяемые задатчиками 6,7, на выходе элемента ИЛИ и компаратора имеем единичный уровень сигнала, а на выходах инверторов 4,5 нулевые.
При превышении входным сигналом Ue значения U2, т.е. при появлении условия Uе > U2, на выходе инвертора 4 появляется единичный сигнал, увеличивающий счет счетчика 9 и поступающий также в канал управления b регулятора. При снижении входного сигнала Uе за значение U1, т.е. при условии Ue < U1, имеем единичный сигнал на выходе инвертора 5 и в канале управления a регулятора с выхода элемента ИЛИ 3 и, соответственно, уменьшение cчета счетчика 9.
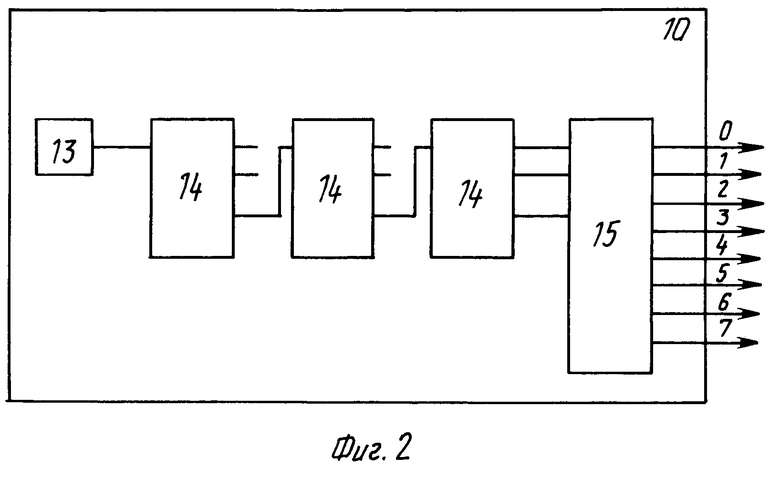
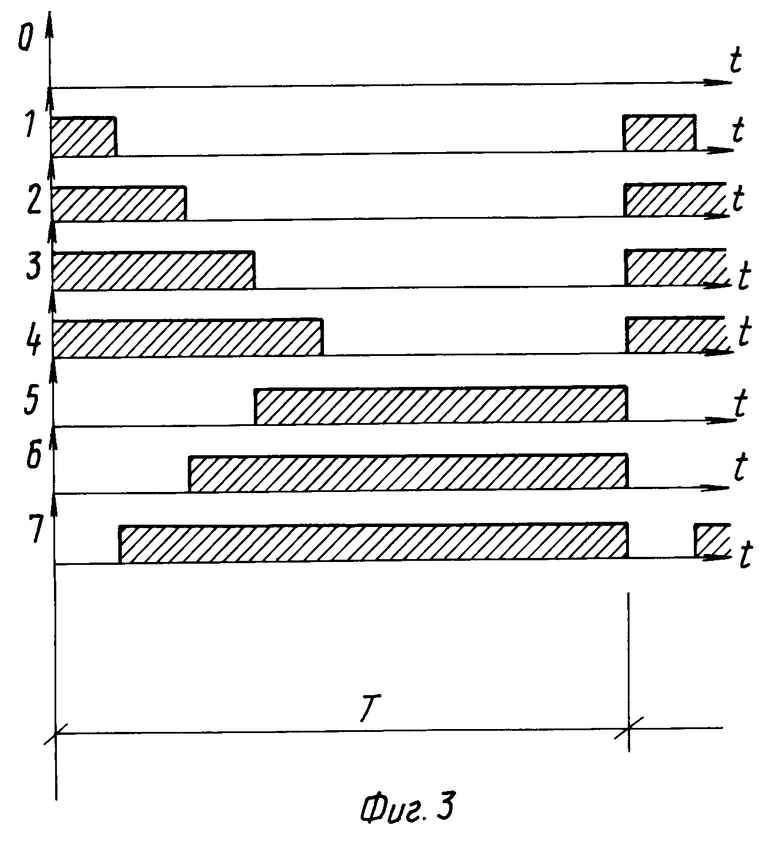
Двоичное значение сигнала счетчика его выходной код является управляющим входным кодом мультиплексора 1, соединяющим соответствующий коммутируемый входной канал мультиплексора (0-7) с выходным. При этом в выходной канал мультиплексора поступают прямоугольные импульсы соответствующей скважности, показанные на фиг.3, с соответствующих выходных каналов (0-7) таймер-генератора, показанного на фиг.2. Ту же задачу можно решить путем подключения к водным каналам мультиплексора (1-7) генераторов прямоугольных импульсов с соответствующей скважностью.
При поступлении единичного сигнала на второй вход элемента И2 с двухпорогового компаратора 8, т.е. при нахождении регулируемой величины Uе в зоне регулирования (U1< Uе< U2) и поступлении на первый вход прямоугольных импульсов с мультиплексора 1, аналогичные импульсы формируются на выходе элемента ИЛИ 3, т.е. в канале управления а регулятора.
Таймер-генератор 10 (фиг. 2) может быть построен, например, следующим образом. С тактового генератора 13 сигнал поступает на цепочку делителей частоты на базе двоичных счетчиков 14. С последнего подаются выходные сигналы на дешифратор 15, например, на базе двухвходовых элементов И-НЕ. Такая реализация совокупности прямоугольных импульсов с различной скважностью оказывается проще совокупности тех же импульсов на базе ГПИ.
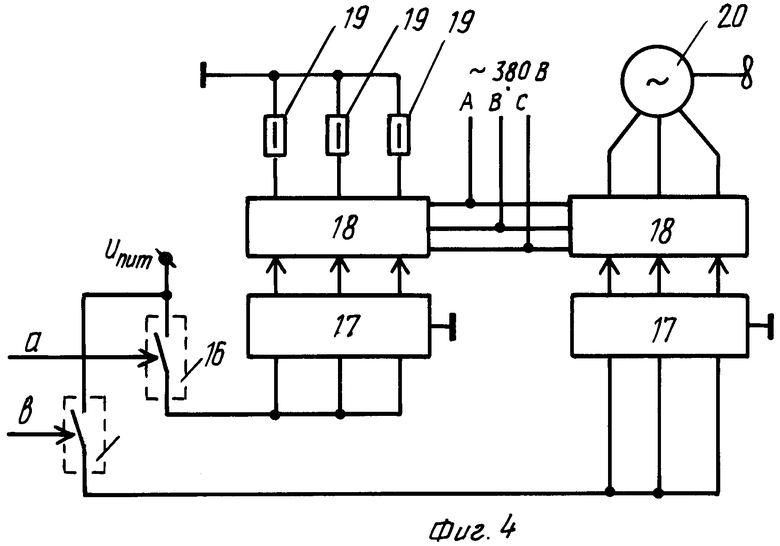
Выходные сигналы, поступающие в каналы управления а и b регулятора, подаются на транзисторные ключи управления и далее на симисторы через гальваническую развязку на оптопарах. Возможный вариант управления одной зоной экструдера путем регулирования температуры в зоне то нагревом, то охлаждением показан на фиг. 4. Сигналы с регулятора по каналам а и b подаются на транзисторные ключи 16, управляющие симисторами 18 через оптопары 17. При перегреве, т. е. при условии Ue > U2, имеем единичный сигнал в канале b, включающий вентилятор 20 на охлаждение зоны. При охлаждении и вхождении температуры в зону единичные импульсные сигналы соответствующей скважности поступают в канал а, включая с той же скважностью и длительностью нагреватели 19. В случае переохлаждения и выходе регулируемой величины из зоны, т.е. при условии Uе < U1, имеем постоянный единичный скачок в канале а, включающий на постоянный нагрев нагреватели 19. Одновременно меняется результат счета реверсивного счетчика 9 и, следовательно, меняется длительность импульсов, подключаемых к выходу мультиплексора 1, т.е. происходит адаптация управляющих сигналов средней позиции регулятора, находящихся в режиме ожидания, до прихода единичного сигнала на второй вход элемента И2, т.е. до вхождения регулируемой величины в зону регулирования.
Таким образом, в рассмотренном примере в качестве нижней крайней позиции регулятора выступает мощность, отбираемая от зоны экструдера трехфазным вентилятором 20, в качестве верхней полная мощность нагревателей 19, включенных по схеме "звезда", а в качестве адаптирующейся средней мощность, подводимая к нагревателям 19 при соответствующей длительности и скважности импульсных сигналов, идущих с мультиплексора 1 и определяемых таймер-генератором 10. При этом управляющие сигналы средней позиции имеют тот же уровень, что и управляющий сигнал верхней позиции, что удобно для их использования и не требует специального устройства сопряжения с исполнительным устройством нагревателями.
При подаче сигнала от элемента 11 происходит обнуление счетчика, а затем с задержкой τ установление определенного кода на его выходе, определяющего установку исходного значения средней позиции регулятора, от которой он начнет работать.
В качестве основных элементов регулятора могут быть использованы, например, следующие интегральные схемы (ИС):
Двухпороговый компаратор 8 521 СА 4 Инверторы 4,5 К 555 ЛН 1
Четырехразрядный
двоичный реверсивный счетчик 9 К 555 ИЕ 6 Мультиплексор 1 К 555 КП 5
Таймер-генератор может быть реализован на двоичных счетчиках 14 на базе ИС К 555 ИЕ 5 и элементах И-НЕ на базе ИС К 555 ЛА 3, используемых в дешифраторе 15 и генераторе 13. Наконец, для связи регулятора с исполнительными устройствами можно использовать транзисторные ключи 16 на базе КТ 603 А, в качестве оптопар 17 тиристорные оптопары АОУ 103 В, а в качестве симисторов 18 симисторы ТС 122-20.
В настоящее время реализовано несколько регуляторов, которые внедрены для управления экструдером на Новомосковском заводе "Полимерконтейнер", что подтверждено актом внедрения, прилагаемым к заявке. При этом управляющие сигналы регуляторов подавались на силовые блоки, реализованные по блок-схеме, представленной на фиг.4.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХПОЗИЦИОННЫЙ АДАПТИВНЫЙ ЭЛЕКТРОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2138071C1 |
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1990 |
|
SU1802606A1 |
| АДАПТИВНЫЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР | 2010 |
|
RU2408913C1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1988 |
|
SU1554628A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2153696C2 |
| СПОСОБ КАСКАДНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2127895C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2158435C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2129726C1 |
| ПНЕВМАТИЧЕСКИЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1985 |
|
SU1289244A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2155361C2 |
Изобретение относится к техническим средствам автоматизации, а именно к электронным позиционным регуляторам. Оно может быть использовано при автоматизации работы нагревательных печей, экструдеров и литьевых машин, реакторов и иных объектов с использованием для регулирования одной технологической величины ряда управляющих воздействий. Позиционный регулятор содержит два инвертора 4, 5 и два задатчика 6, 7 зоны нечувствительности, выходы которых подключены к первому и второму входам двухпорогового компаратора 8, третий вход которого является входом регулируемой величины. Первый и третий выходы двухпорогового компаратора 8 через первый и второй инверторы 4, 5 соединены соответственно с суммирующим и вычитающим выходом двоичного счетчика 9, синхронизирующий вход которого и вход обнуления соединены с элементом обнуления 11 и элементом задержки 12. Регулятор содержит также мультиплексор 1, таймер-генератор 10, элементы И 2 и ИЛИ 3. Первый вход элемента ИЛИ 3 соединен с выходом элемента И 2, второй вход с выходом второго инвертора 5, первый вход элемента И 2 соединен с выходом мультиплексора 1, второй вход с вторым выходом двухпорогового компаратора 8. Коммутируемые входы мультиплексора 1 соединены с выходными каналами таймер-генератора 10, а управляющие входы с выходами реверсивного счетчика 9. 4 ил.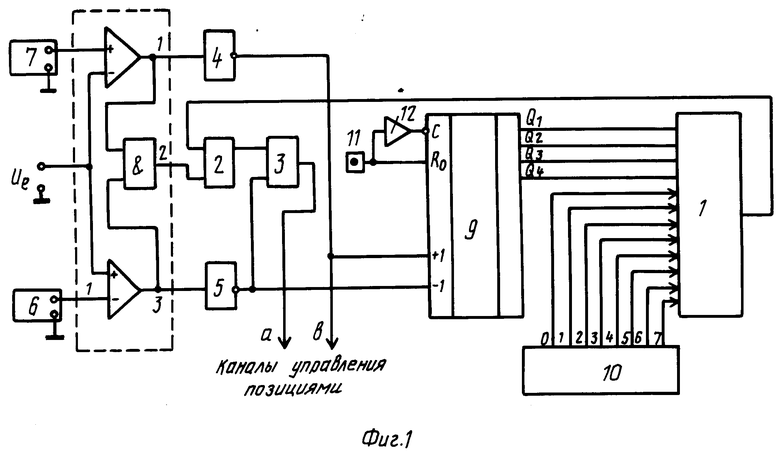
ПОЗИЦИОННЫЙ РЕГУЛЯТОР, содержащий два инвертора и два задатчика зоны нечувствительности, выходы которых подключены к первому и второму входам двухпорогового компаратора, а третий вход является входом регулируемой величины регулятора, первый и третий выходы двухпорогового компаратора через первый и второй инверторы соединены соответственно с суммирующим и вычитающим входами реверсивного счетчика, вход обнуления и синхронизирующий вход которого соединены с выходом элемента обнуления и установки исходного значения средней позиции соответственно непосредственно и через элемент задержки, отличающийся тем, что в него введены мультиплексор, таймер-генератор, элементы И и ИЛИ, первый вход последнего соединен с выходом элемента И, второй с выходом второго инвертора, первый вход элемента И соединен с выходом мультиплексора, а второй с вторым выходом двухпорогового компаратора, коммутируемые входы мультиплексора соединены с выходными каналами таймер-генератора, а управляющие входы с выходами реверсивного счетчика, причем выходы первого инвертора и элемента ИЛИ образуют выходы регулятора.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1990 |
|
SU1802606A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
