Изобретение относится к автоматическому управлению и регулированию и может быть использовано при создании систем автоматического управления.
Цель изобретения - повышение быстродействия адаптивного регулятора. На фиг, 1 приведена блок-схема ; адаптивного регулятора-с раздельным формированием амплитуды и фазы управления, реализующего управления с нулевым коэффициентом гармонической линеаризации; на фиг. 2 - схема блока вычисления второй производной.
На чертежах приняты обозначения: (t) - сигнал ошибки, равный разнос- ;ти между выходной переменной объекта регулирования в момент времени t и заданием на выходную переменную; 5(t) - первая производная от (t) g(t) - вторая производная от (t); U(t) - регулирующее воздействие. . Адаптивный регулятор содержит (фиг. 1) масштабирующий блок 1 и блок 2 определения модуля, первый 3 и второй 4 блоки определения знака, блок 5 вычисления второй производной, сумматор 6, блок 7 умножения, дифференциаторы 8 и 9.
Блоки 3 и 4 определения знака представляют собой релейные элементы типа РЭС 49.
Адаптивный регулятор работает следующим образом.
Сигнал ошибки (t) поступает в канал формирования амплитудной части управления. При этом (t) подается на вход масштабирующего блока 1, где умножается на постоянный коэффи- циент К„ С выхода блока 1 сигнал поступает на вход блока 2 определения модуля, в результате чего на выходе блока 2 формируется амплитудная компонента сигнала управления
|Ke(t)|.
Одновременно сигнал - ошибки поступает в канал формирования знаковой компоненты сигнала управления. По . сигналу ошибки 6(t) первый блок 3 определения знака формирует знаковый сигнал, sian 5 (t) , Сигнал ошибки (t) поступает на вход дифференциатора 8, в результате на его выходе получаем сигнал 6(t), который поступает на вход дифференциатора 9. На выходе , элемента 9 блока 5 вычисления второй производной получаем сигнал & (t). Сигнал с выхода блока 5 поступает на
вход блока 4 определения знака, в результате на его выходе формируется сигнал Sian (t). Далее выходные сигналы с блоков 3 и 4 поступают на вход сумматора 6, на выходе блока б формируется знаковая компонента сигнала управления siuf 6 (t) stQn(t) .
Vо
Сигналы с выходов блоков 2 и 6 , поступают на вход блока 7 умножения, выходной сигнал которого и является сигналом управления.
Сигнал управления, формируемый адаптивным регулятором, в общем слу- чае описывается уравнением
и
и,| ( и,+ up, (1)
где и - управление, подаваемое на
объект; и ( , Uj - знаковые компоненты сигнала
управления;
Uj - амплитудная компонента сигнала управления. Замкнутая система с управлением (1) сохраняет устойчивость при больших значениях коэффициента усиле-- ния К.
Предлагаемый адаптивный регулятор особенно эффективен при управлении сложными объектами высокого порядка. Формула изобретения
Адаптивный регулятор, содержащий масштабирующий блок, блок определения модуля, первый блок определения знака и блок умножения, вых-од которого является выходом адаптивного регуятора, а первый вход блока умножения соединен с выходом блока определения модуля, подключенного. входом к выходу масштабирующего блока, вход которого соединен с входом адаптивного регулятора и с входом первого блока определения знака, о т л ичающий с я тем, что, с целью повышения быстродействия адаптивного регулятора, введены блок вычисления второй производной, второй блок определения знака и сумматор, подключенный выходом к второму входу блока умножения, первый вход сумматора соединен с выходом первого блока определения знака, второй вход сумматора соединен с выходом второго блока определения знака, подключенного входом к выходу блока вычисления второй производной, вход КОТО
рога соединен с входом адаптивного регулятора.
Редактор В. Петраш
Заказ 4216/35Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
fpuz.2
Составитель К. Власов
Техред М.Дидык Корректор н-Король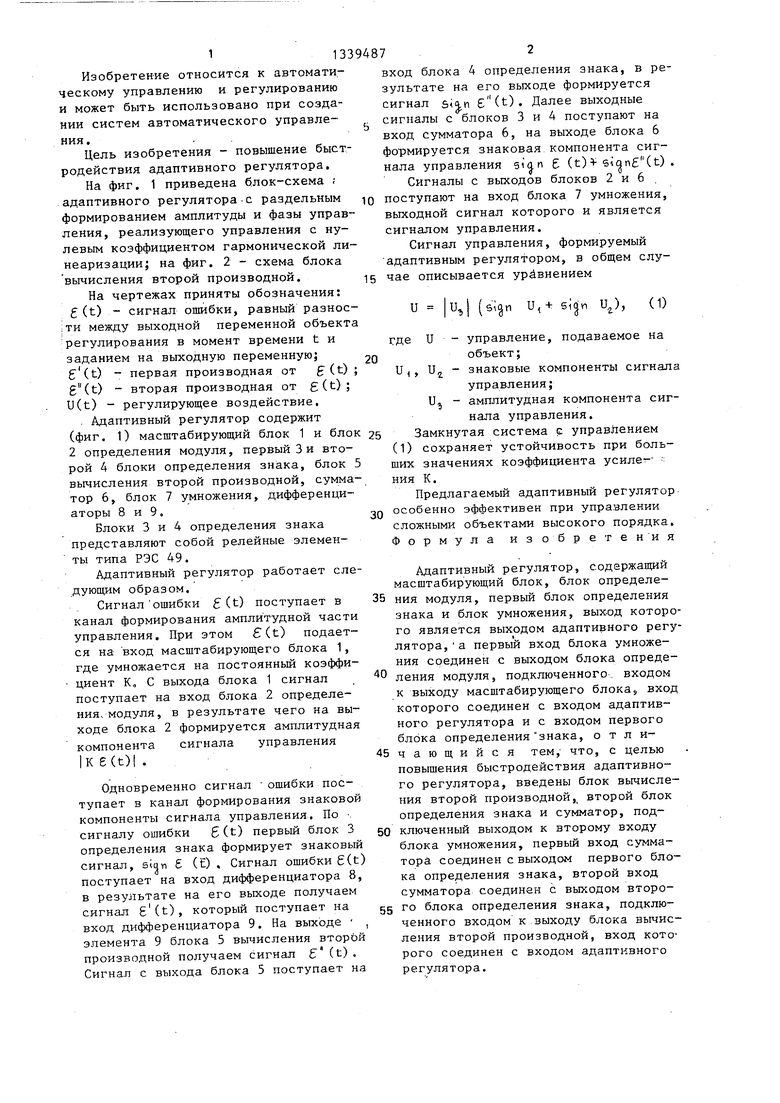
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный регулятор | 1988 |
|
SU1541555A2 |
| Адаптивный регулятор | 1989 |
|
SU1675845A1 |
| Система управления измельчительным агрегатом | 1982 |
|
SU1101302A1 |
| Адаптивный регулятор | 1980 |
|
SU911462A1 |
| Регулятор с переменной структурой | 1978 |
|
SU736046A1 |
| Устройство автоматического управления гидроциклоном | 1980 |
|
SU927321A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Адаптивное регулирующее устройство | 1982 |
|
SU1064271A1 |
| Адаптивная система регулирования | 1978 |
|
SU813356A1 |
| Адаптивный регулятор | 1984 |
|
SU1228073A1 |
Изобретение относится к автоматическому управлению и регулированию и может быть применено при создании систем автоматического управления в различных отраслях промышленности. Цель изобретения - повышение быстродействия адаптивного регулятора с одновременным сохранением требуемого запаса устойчивости. Адаптивный регулятор .содержит масштабирующий блок 1, блок 2 определения модуля, блок умножения 7, блоки 3 и 4 определения знака, сумматор 6 и блок 5 вычисления второй производной. Устройство позволяет сформировать управление с коэффициентом гармонической линеаризации управления, приблизительно равным нулю. 2 ил., i W со со :о 4 ЭО 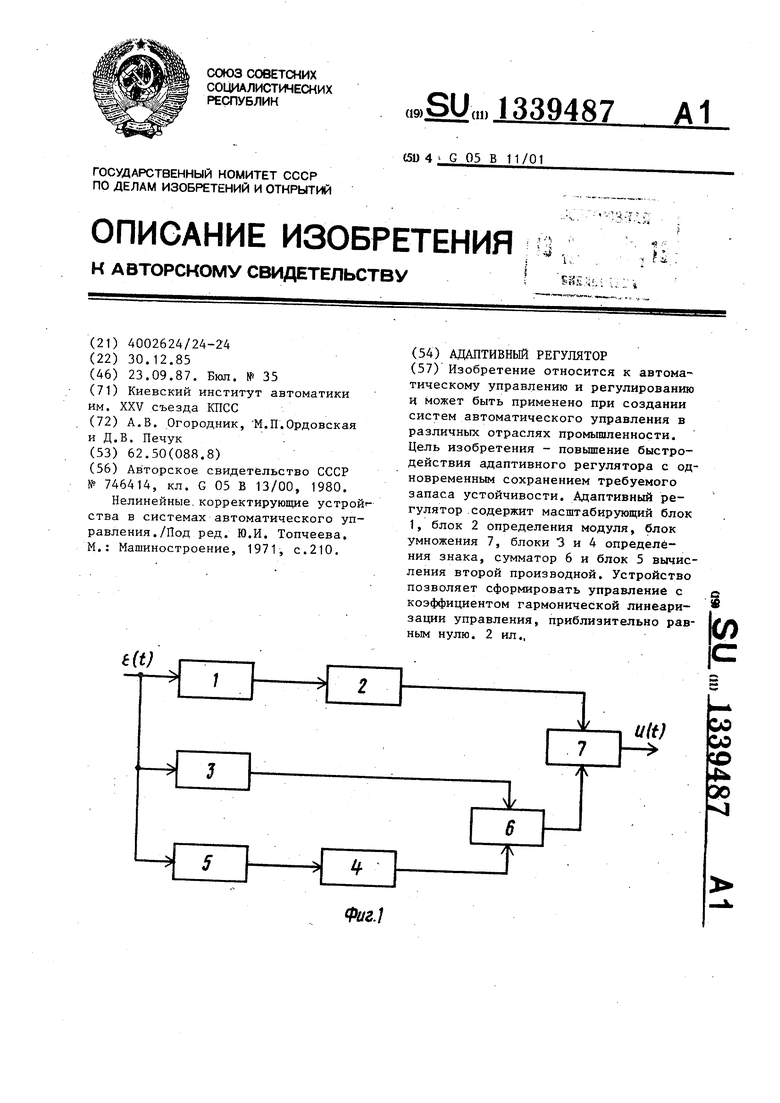
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Нелинейные, корректирующие устройг- ства Б системах автоматического управления./Под ред | |||
| Ю.И | |||
| Топчеева | |||
| М.: Машиностроение, 1971, с.210. | |||
